KR20080098380A - 직접 시동을 보조하는 분리 클러치를 갖는 하이브리드 구동기 - Google Patents
직접 시동을 보조하는 분리 클러치를 갖는 하이브리드 구동기 Download PDFInfo
- Publication number
- KR20080098380A KR20080098380A KR1020087020638A KR20087020638A KR20080098380A KR 20080098380 A KR20080098380 A KR 20080098380A KR 1020087020638 A KR1020087020638 A KR 1020087020638A KR 20087020638 A KR20087020638 A KR 20087020638A KR 20080098380 A KR20080098380 A KR 20080098380A
- Authority
- KR
- South Korea
- Prior art keywords
- internal combustion
- combustion engine
- driver
- hybrid
- torque
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/40—Controlling the engagement or disengagement of prime movers, e.g. for transition between prime movers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/48—Parallel type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/24—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/10—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines
- B60L50/16—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines with provision for separate direct mechanical propulsion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/02—Conjoint control of vehicle sub-units of different type or different function including control of driveline clutches
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02N—STARTING OF COMBUSTION ENGINES; STARTING AIDS FOR SUCH ENGINES, NOT OTHERWISE PROVIDED FOR
- F02N15/00—Other power-operated starting apparatus; Component parts, details, or accessories, not provided for in, or of interest apart from groups F02N5/00 - F02N13/00
- F02N15/02—Gearing between starting-engines and started engines; Engagement or disengagement thereof
- F02N15/022—Gearing between starting-engines and started engines; Engagement or disengagement thereof the starter comprising an intermediate clutch
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02N—STARTING OF COMBUSTION ENGINES; STARTING AIDS FOR SUCH ENGINES, NOT OTHERWISE PROVIDED FOR
- F02N99/00—Subject matter not provided for in the other groups of this subclass
- F02N99/002—Starting combustion engines by ignition means
- F02N99/006—Providing a combustible mixture inside the cylinder
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/26—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the motors or the generators
- B60K2006/268—Electric drive motor starts the engine, i.e. used as starter motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/02—Clutches
- B60W2510/0241—Clutch slip, i.e. difference between input and output speeds
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/06—Combustion engines, Gas turbines
- B60W2510/0685—Engine crank angle
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02N—STARTING OF COMBUSTION ENGINES; STARTING AIDS FOR SUCH ENGINES, NOT OTHERWISE PROVIDED FOR
- F02N19/00—Starting aids for combustion engines, not otherwise provided for
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- General Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Power Engineering (AREA)
- Hybrid Electric Vehicles (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Abstract
Description
Claims (11)
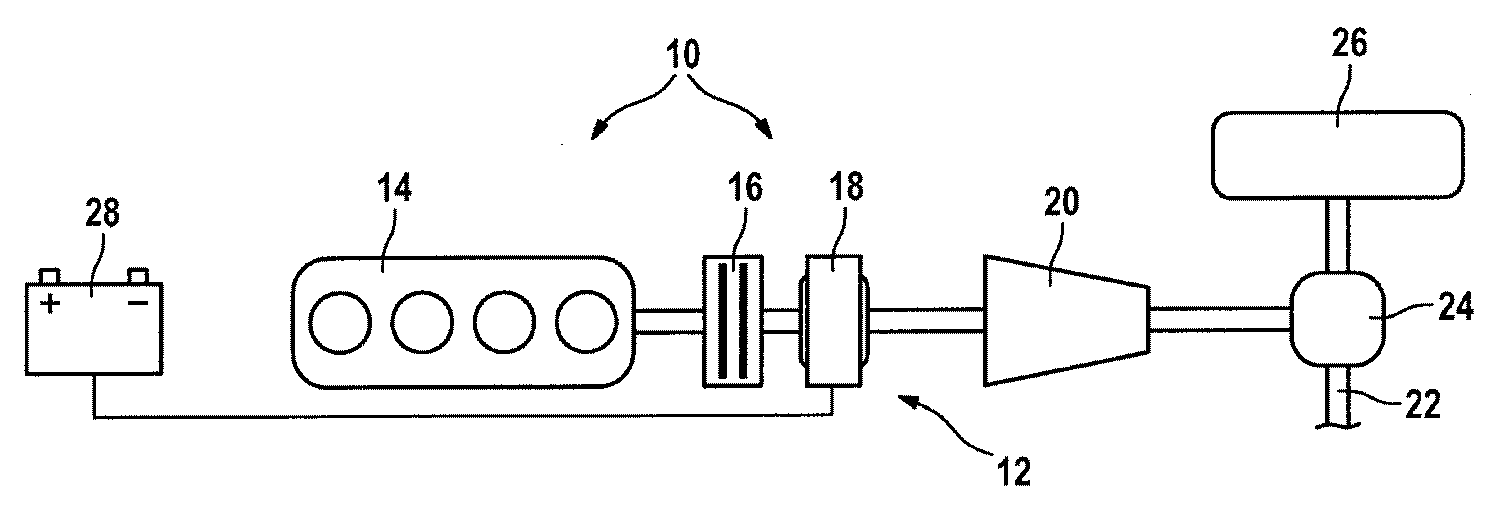
- 적어도 하나의 트랙션 배터리(20)가 할당된 적어도 하나의 전기 구동기(18)와 내연 기관(14)을 갖는 차량의 하이브리드 구동기(10) 작동 방법에 있어서,내연 기관(14)은 스타터 없이 실행된 직접 시동에 의해 하이브리드 구동기(10)의 작동 모드인 "전기적 구동만에 의한 작동"(120)으로부터 시동될 수 있는 것을 특징으로 하는 하이브리드 구동기 작동 방법.
- 제1항에 있어서, 하이브리드 구동기(10)의 내연 기관(14)은, 적어도 하나의 전기 구동기(18)가 운전자의 지수인 토크 요구를 변환할 수 없을 때, 운전자의 토크 요구(MFahrer)에 따라 시동되는 것을 특징으로 하는 하이브리드 구동기 작동 방법.
- 제2항에 있어서, 내연 기관(14)의 직접 시동이 준비될 때(B_DST : = TRUE), 내연 기관은 분리 클러치(16)가 개방되는 경우에 시동되는 것을 특징으로 하는 하이브리드 구동기 작동 방법.
- 제2항에 있어서, 내연 기관(14)의 직접 시동이 준비되지 않는 경우(B_DST : = FALSE), 슬립 토크가 조절된 분리 클러치(16)는 엔진 드래그 토크(M_SCHLEPP)를 내연 기관(14)에 전달하는 것을 특징으로 하는 하이브리드 구동기 작동 방법.
- 제4항에 있어서, 운전자의 토크 요구(MFahrer)가 상승하는 경우, 내연 기관(14)은 제어부(52)의 시동 명령(B_START : = TRUE)에 의해 동역학적 직접 시동에 의해서 시동되는 것을 특징으로 하는 하이브리드 구동기 작동 방법.
- 제4항에 있어서, 내연 기관(14)이 시동되지 않는 시구간(DELAY)의 경과 후 분리 클러치(16)가 개방되며, 내연 기관(14)은 선회각 영역(38), 바람직하게는 목표 정지 영역(40) 내에서 선회하는 것을 특징으로 하는 하이브리드 구동기 작동 방법.
- 제6항에 있어서, 내연 기관(14)의 목표 정지 영역(40)은 상사점 이후 100°와 120°사이에 있는 적어도 하나의 실린더(30)의 위치를 통해서 규정되는 것을 특징으로 하는 하이브리드 구동기 작동 방법.
- 제2항에 있어서, 하이브리드 구동기(10)는 내연 기관(14)을 위한 제어부(56)와, 적어도 하나의 전기 구동기(18)를 위한 제어부(58)와, 분리 클러치(16)를 위한 제어부(60)가 부속된 제어부(52)에 의해서 모니터링되며, 상기 제어부(52)는 우선적으로 적어도 하나의 전기 구동기(18)에 의해서 운전자의 토크 요구(MFahrer)를 변환하는 것을 특징으로 하는 하이브리드 구동기 작동 방법.
- 내연 기관(14)과, 적어도 하나의 전기 구동기(18)와, 적어도 하나의 트랙션 배터리(28)와, 분리 클러치(16)와, 하이브리드 구동기(10)의 제어부(52)를 갖는 하이브리드 구동기(10), 특히 차량의 병렬 하이브리드 구동기에 있어서,내연 기관(14)은 연료 직접 분사 내연 기관(14)이며, 분리 클러치(16)는 슬립 토크가 조절된 클러치인 것을 특징으로 하는 하이브리드 구동기.
- 제9항에 있어서, 슬립 토크가 조절된 분리 클러치(16)는 내연 기관(14)의 엔진 드래그 토크(M_SCHLEPP)에 전달될 수 있는 토크와 관련해서 조정될 수 있는 것을 특징으로 하는 하이브리드 구동기.
- 제9항에 있어서, 내연 기관(14)은 가솔린 직접 분사부를 갖는 오토 엔진인 것을 특징으로 하는 하이브리드 구동기.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102006008640A DE102006008640A1 (de) | 2006-02-24 | 2006-02-24 | Hybridantrieb mit einem Direktstart unterstützender Trennkupplung |
| DE102006008640.6 | 2006-02-24 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20080098380A true KR20080098380A (ko) | 2008-11-07 |
| KR101092679B1 KR101092679B1 (ko) | 2011-12-09 |
Family
ID=38000817
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020087020638A Expired - Fee Related KR101092679B1 (ko) | 2006-02-24 | 2007-01-30 | 직접 시동을 보조하는 분리 클러치를 갖는 하이브리드 구동기와 이의 작동 방법 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US8480536B2 (ko) |
| EP (1) | EP1991454B1 (ko) |
| JP (1) | JP4638946B2 (ko) |
| KR (1) | KR101092679B1 (ko) |
| CN (1) | CN101389519B (ko) |
| DE (1) | DE102006008640A1 (ko) |
| WO (1) | WO2007099003A1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014104676A1 (ko) * | 2012-12-24 | 2014-07-03 | 두산인프라코어 주식회사 | 하이브리드 건설기계용 전원 공급 장치 및 그 방법 |
Families Citing this family (37)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101517260B1 (ko) * | 2007-12-20 | 2015-05-04 | 폭스바겐 악티엔 게젤샤프트 | 하이브리드 차량의 작동 방법 및 장치 |
| DE102007062796A1 (de) * | 2007-12-27 | 2009-07-02 | Robert Bosch Gmbh | Verfahren zum Betreiben einer Hybridantriebsvorrichtung |
| DE102008002666B4 (de) | 2008-06-26 | 2017-08-31 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Starten eines Verbrennungsmotors eines Hybridantriebsstranges |
| DE102008042685A1 (de) * | 2008-10-08 | 2010-04-15 | Robert Bosch Gmbh | Verfahren zum Adaptieren einer Trennkupplung in einer Triebstranganordnung eines Fahrzeugs und Triebstranganordnung |
| DE102008043945A1 (de) * | 2008-11-20 | 2010-05-27 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Betreiben eines Hybridantriebes für ein Fahrzeug |
| DE102008044016B4 (de) * | 2008-11-24 | 2025-07-31 | Robert Bosch Gmbh | Verfahren zum Erfassen eines sich einstellenden Drehmomentes für einen Hybridantrieb |
| US20100276218A1 (en) * | 2009-04-29 | 2010-11-04 | Ford Global Technologies, Llc | Hybrid electric vehicle powertrain having high vehicle speed engine starts |
| DE102009002991A1 (de) * | 2009-05-11 | 2010-11-18 | Robert Bosch Gmbh | Steuergerät, insbesondere für ein Hybridfahrzeug mit einem elektrischen Antrieb und einer Verbrennungskraftmaschine sowie Verfahren zum Betreiben eines Hybridfahrzeugs |
| DE102009027001A1 (de) | 2009-06-17 | 2010-12-23 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Bestimmung des Beginns einer Startphase eines Verbrennungsmotors in einem Hybridfahrzeug |
| DE102009027642A1 (de) * | 2009-07-13 | 2011-01-20 | Robert Bosch Gmbh | Verfahren zum Betreiben eines Hybridfahrzeugs sowie entsprechende Antriebseinrichtung |
| DE102010008680A1 (de) * | 2010-02-19 | 2011-08-25 | Dr. Ing. h.c. F. Porsche Aktiengesellschaft, 70435 | Verfahren zur Steuerung eines Antriebsstrangs in einem Kraftfahrzeug, Antriebsstrangsteuerung für ein Kraftfahrzeug, Steuereinheit für eine Fördereinrichtung zur Bereitstellung von Öldruck in einem Kraftfahrzeug, Verfahren zur Fehlererkennung in einem Hydrauliksystem für ein Kraftfahrzeug und Hydrauliksystem für ein Kraftfahrzeug |
| JP5617301B2 (ja) * | 2010-03-25 | 2014-11-05 | マツダ株式会社 | 車両用駆動制御装置 |
| JP5545018B2 (ja) * | 2010-05-12 | 2014-07-09 | マツダ株式会社 | 車両用駆動制御装置 |
| JP5545017B2 (ja) * | 2010-05-12 | 2014-07-09 | マツダ株式会社 | 車両用駆動制御装置 |
| US10479184B2 (en) * | 2010-09-30 | 2019-11-19 | Evaos, Inc. | Auxiliary electric drive system and vehicle using same |
| WO2013014797A1 (ja) | 2011-07-28 | 2013-01-31 | トヨタ自動車株式会社 | ハイブリッド車両のエンジン停止制御装置 |
| WO2013030986A1 (ja) * | 2011-08-31 | 2013-03-07 | トヨタ自動車株式会社 | ハイブリッド車両のエンジン停止制御装置 |
| WO2013030987A1 (ja) * | 2011-08-31 | 2013-03-07 | トヨタ自動車株式会社 | ハイブリッド車両のエンジン始動制御装置 |
| JP5804068B2 (ja) * | 2011-08-31 | 2015-11-04 | トヨタ自動車株式会社 | ハイブリッド車両のエンジン始動制御装置 |
| JP5729477B2 (ja) * | 2011-09-06 | 2015-06-03 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| DE112011105712T5 (de) * | 2011-10-06 | 2014-08-07 | Toyota Jidosha Kabushiki Kaisha | Maschinenstartsytem |
| EP2769893A4 (en) * | 2011-10-20 | 2016-08-24 | Toyota Motor Co Ltd | ENGINE STARTING DEVICE FOR A HYBRID VEHICLE |
| JP5761365B2 (ja) * | 2011-10-27 | 2015-08-12 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| JP5927626B2 (ja) * | 2011-10-28 | 2016-06-01 | ダイハツ工業株式会社 | クラッチタイミング制御装置 |
| DE102012204849A1 (de) | 2012-03-27 | 2013-10-02 | Robert Bosch Gmbh | Verfahren und Regelungseinrichtung zur Regelung eines Hybridantriebs eines hybridelektrischen Kraftfahrzeugs |
| DE102012206157A1 (de) * | 2012-04-16 | 2013-10-17 | Zf Friedrichshafen Ag | Steuerungseinrichtung eines Hybridfahrzeugs und Verfahren zum Betreiben desselben |
| CN104684778B (zh) * | 2012-09-18 | 2017-05-17 | 丰田自动车株式会社 | 车辆用驱动装置的控制装置 |
| JP5724975B2 (ja) | 2012-09-18 | 2015-05-27 | トヨタ自動車株式会社 | 車両用の制御装置 |
| DE112013006898T5 (de) * | 2013-04-01 | 2015-12-31 | Toyota Jidosha Kabushiki Kaisha | Stopp-Steuerungsvorrichtung für eine Verbrennungskraftmaschine |
| US10006430B2 (en) | 2013-04-16 | 2018-06-26 | Toyota Jidosha Kabushiki Kaisha | Vehicle control device |
| JP2015017543A (ja) * | 2013-07-10 | 2015-01-29 | トヨタ自動車株式会社 | 車両の制御装置 |
| DE102013225150A1 (de) * | 2013-12-06 | 2015-06-11 | Volkswagen Aktiengesellschaft | Verfahren zum Start eines Verbrennungsmotors eines Kraftfahrzeugs und Kraftfahrzeug |
| US9481256B2 (en) * | 2014-01-30 | 2016-11-01 | Amp Electric Vehicles Inc. | Onboard generator drive system for electric vehicles |
| CN104842997A (zh) * | 2014-07-04 | 2015-08-19 | 北汽福田汽车股份有限公司 | 一种混合动力车辆动力系统的发动机启动方法 |
| DE102017200982B4 (de) | 2017-01-23 | 2021-09-16 | Audi Ag | Verfahren zum Betreiben einer Antriebseinrichtung für ein Kraftfahrzeug sowie entsprechende Antriebseinrichtung |
| US10543739B1 (en) | 2018-07-25 | 2020-01-28 | Fca Us Llc | Mode transition control techniques for an electrically all-wheel drive hybrid vehicle |
| DE102021107414A1 (de) | 2021-03-24 | 2022-09-29 | Bayerische Motoren Werke Aktiengesellschaft | Antriebsvorrichtung und Verfahren zum Steuern von Antriebsvorrichtung |
Family Cites Families (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3870505B2 (ja) | 1997-08-29 | 2007-01-17 | アイシン・エィ・ダブリュ株式会社 | 車両用ハイブリッド駆動装置 |
| DE10006861A1 (de) | 1999-05-10 | 2000-11-30 | Bosch Gmbh Robert | Triebstranganordnung für ein Kraftfahrzeug und Verfahren zur Steuerung des Betriebs derselben |
| DE10025853A1 (de) | 1999-06-02 | 2001-04-19 | Luk Lamellen & Kupplungsbau | Antriebsstrang und Verfahren zu dessen Betrieb |
| JP2001055941A (ja) * | 1999-08-16 | 2001-02-27 | Honda Motor Co Ltd | エンジン自動始動停止制御装置 |
| IT1319883B1 (it) * | 2000-02-04 | 2003-11-12 | Fiat Ricerche | Procedimento e sistema di controllo della propulsione di unautoveicolo |
| US7407026B2 (en) * | 2000-10-11 | 2008-08-05 | Ford Global Technologies, Llc | Control system for a hybrid electric vehicle to anticipate the need for a mode change |
| JP3454245B2 (ja) * | 2000-10-26 | 2003-10-06 | トヨタ自動車株式会社 | 車両の始動制御装置 |
| US6543565B1 (en) * | 2000-11-10 | 2003-04-08 | Ford Motor Company | Method and system for collecting regenerative braking energy in a parallel hybrid electric vehicle |
| JP3593983B2 (ja) * | 2001-01-16 | 2004-11-24 | 日産自動車株式会社 | 車両の駆動力制御装置 |
| WO2003049969A2 (de) * | 2001-12-13 | 2003-06-19 | Siemens Aktiengesellschaft | Antriebsstrang eines kraftfahrzeugs und verfahren zum steuern eines antriebsstrangs |
| EP1497151B1 (de) * | 2002-04-10 | 2009-04-08 | LuK Lamellen und Kupplungsbau Beteiligungs KG | Verfahren zum betrieb eines kraftfahrzeuges |
| JP3809824B2 (ja) * | 2002-09-10 | 2006-08-16 | トヨタ自動車株式会社 | ハイブリッド車 |
| DE10303822A1 (de) | 2003-01-31 | 2004-08-12 | Volkswagen Ag | Antriebsvorrichtung für ein Kraftfahrzeug und entsprechendes Verfahren |
| JP3815441B2 (ja) * | 2003-02-04 | 2006-08-30 | トヨタ自動車株式会社 | 内燃機関の停止始動制御装置 |
| JP3941705B2 (ja) | 2003-02-13 | 2007-07-04 | トヨタ自動車株式会社 | 内燃機関の停止始動制御装置 |
| JP2004346811A (ja) * | 2003-05-21 | 2004-12-09 | Toyota Motor Corp | ハイブリッド自動車およびこれに搭載された内燃機関の始動方法 |
| US7216729B2 (en) * | 2003-09-19 | 2007-05-15 | Ford Global Technologies, Llc | Method and system of requesting engine on/off state in a hybrid electric vehicle |
| DE10356384A1 (de) | 2003-12-03 | 2005-06-30 | E. Zoller GmbH & Co. KG Einstell- und Messgeräte | Werkzeugbeleuchtungsvorrichtung |
| JP3912368B2 (ja) * | 2003-12-05 | 2007-05-09 | 日産自動車株式会社 | ハイブリッド変速機搭載車のエンジン始動方法 |
| US7082899B2 (en) | 2004-03-26 | 2006-08-01 | Bose Corporation | Controlled starting and braking of an internal combustion engine |
| JP4412025B2 (ja) | 2004-03-29 | 2010-02-10 | マツダ株式会社 | エンジンの始動装置 |
| US7013213B2 (en) * | 2004-05-12 | 2006-03-14 | Ford Global Technologies, Llc | Method for controlling starting of an engine in a hybrid electric vehicle powertrain |
| DE102004023673B4 (de) | 2004-05-13 | 2017-12-14 | Volkswagen Ag | Verfahren zur Steuerung des Antriebsstranges eines Hybridfahrzeugs |
| US7214156B2 (en) * | 2004-06-18 | 2007-05-08 | Eaton Corporation | Start and operation sequences for hybrid motor vehicles |
| US7350602B2 (en) * | 2004-07-19 | 2008-04-01 | Ford Global Technologies, Llc | System and method for engine start detection for hybrid vehicles |
| US7085631B2 (en) * | 2004-07-29 | 2006-08-01 | Ford Global Technologies, Llc | Vehicle and method for operating an engine in a vehicle |
| US7370715B2 (en) * | 2004-12-28 | 2008-05-13 | Ford Global Technologies, Llc | Vehicle and method for controlling engine start in a vehicle |
| US7469667B2 (en) * | 2005-07-07 | 2008-12-30 | Ford Global Technologies, Llc | Method for controlling a variable event valvetrain |
| JP2007040279A (ja) * | 2005-08-05 | 2007-02-15 | Toyota Motor Corp | 内燃機関の制御装置 |
| JP4341610B2 (ja) * | 2005-11-09 | 2009-10-07 | 日産自動車株式会社 | ハイブリッド車両のエンジン再始動制御装置 |
| US7546821B2 (en) * | 2006-03-02 | 2009-06-16 | Ford Global Technologies, Llc | Hydraulic actuation system for improved engine start |
| JP4749988B2 (ja) * | 2006-10-23 | 2011-08-17 | 日立オートモティブシステムズ株式会社 | 内燃機関の始動制御装置 |
| US7552705B2 (en) * | 2007-03-07 | 2009-06-30 | The Gates Corporation | Vehicle stop/start system with regenerative braking |
| JP4535135B2 (ja) * | 2008-01-17 | 2010-09-01 | トヨタ自動車株式会社 | 始動制御装置 |
-
2006
- 2006-02-24 DE DE102006008640A patent/DE102006008640A1/de not_active Withdrawn
-
2007
- 2007-01-30 JP JP2008555728A patent/JP4638946B2/ja not_active Expired - Fee Related
- 2007-01-30 WO PCT/EP2007/050867 patent/WO2007099003A1/de not_active Ceased
- 2007-01-30 KR KR1020087020638A patent/KR101092679B1/ko not_active Expired - Fee Related
- 2007-01-30 CN CN2007800065983A patent/CN101389519B/zh active Active
- 2007-01-30 US US12/162,819 patent/US8480536B2/en not_active Expired - Fee Related
- 2007-01-30 EP EP07704220.8A patent/EP1991454B1/de not_active Not-in-force
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014104676A1 (ko) * | 2012-12-24 | 2014-07-03 | 두산인프라코어 주식회사 | 하이브리드 건설기계용 전원 공급 장치 및 그 방법 |
| US9783066B2 (en) | 2012-12-24 | 2017-10-10 | Doosan Infracore Co., Ltd. | Power supply device for hybrid construction machinery, and method therefor |
Also Published As
| Publication number | Publication date |
|---|---|
| CN101389519B (zh) | 2012-12-05 |
| CN101389519A (zh) | 2009-03-18 |
| US20090105038A1 (en) | 2009-04-23 |
| US8480536B2 (en) | 2013-07-09 |
| KR101092679B1 (ko) | 2011-12-09 |
| DE102006008640A1 (de) | 2007-08-30 |
| EP1991454A1 (de) | 2008-11-19 |
| JP4638946B2 (ja) | 2011-02-23 |
| EP1991454B1 (de) | 2013-10-09 |
| WO2007099003A1 (de) | 2007-09-07 |
| JP2009527411A (ja) | 2009-07-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101092679B1 (ko) | 직접 시동을 보조하는 분리 클러치를 갖는 하이브리드 구동기와 이의 작동 방법 | |
| US6524223B2 (en) | Drive train for a motor vehicle | |
| JP3775012B2 (ja) | 車両用ハイブリッド駆動装置 | |
| KR101632453B1 (ko) | 하이브리드 파워 트레인의 내연기관 시동 방법 및 시동 장치 | |
| US7610891B2 (en) | Method for controlling the start-up phase of a motor vehicle | |
| KR101722869B1 (ko) | 하이브리드 전기 차량 제어 시스템 및 방법 | |
| US11136011B2 (en) | Method and system for vehicle control | |
| US8360929B2 (en) | Method and control device for operating a hybrid drive | |
| US6418899B1 (en) | Electric drive arrangement for internal combustion engines in motor vehicles | |
| CN105365807A (zh) | 用于启动发动机的方法和系统 | |
| US20090063029A1 (en) | Method for starting an internal combustion engine | |
| CN106460687A (zh) | 以启动/停止特征实施跳过点火 | |
| US10189460B2 (en) | Methods and system for operating a vehicle transmission | |
| RU2692862C2 (ru) | Регулирование зарядки от генератора с учетом добавочного расхода топлива | |
| JP2003515051A (ja) | 内燃機関のためのインパルススタート方法及び装置 | |
| CA2626605C (en) | Method and system for shutting down an engine in a hybrid vehicle | |
| CN104228825A (zh) | 用于使车辆运转的方法 | |
| CN110466496A (zh) | 用于具有手动换档变速器的混合动力车辆的系统和方法 | |
| CN114165340A (zh) | 带传动起动发电机辅助的发动机停机 | |
| CN104010857B (zh) | 混合动力汽车的控制装置和用于其运行的方法 | |
| US11519498B2 (en) | Methods and system for engine control during gear shifting in a hybrid electric vehicle | |
| US20130298875A1 (en) | Method for operating a motor vehicle | |
| JP5617301B2 (ja) | 車両用駆動制御装置 | |
| US20070277773A1 (en) | Method And Device For Stopping And Starting The Engine Of Hybrid Vehicles | |
| EP2301817B1 (en) | Electric power generation control system for internal combustion engine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
St.27 status event code: A-0-1-A10-A15-nap-PA0105 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U12-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| FPAY | Annual fee payment |
Payment date: 20141204 Year of fee payment: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| FPAY | Annual fee payment |
Payment date: 20161201 Year of fee payment: 6 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 6 |
|
| FPAY | Annual fee payment |
Payment date: 20171129 Year of fee payment: 7 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 7 |
|
| FPAY | Annual fee payment |
Payment date: 20181127 Year of fee payment: 8 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 8 |
|
| R17-X000 | Change to representative recorded |
St.27 status event code: A-5-5-R10-R17-oth-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| FPAY | Annual fee payment |
Payment date: 20191126 Year of fee payment: 9 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 9 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 10 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 11 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 12 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 13 |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: A-4-4-U10-U13-oth-PC1903 Not in force date: 20241206 Payment event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE |
|
| H13 | Ip right lapsed |
Free format text: ST27 STATUS EVENT CODE: N-4-6-H10-H13-OTH-PC1903 (AS PROVIDED BY THE NATIONAL OFFICE); TERMINATION CATEGORY : DEFAULT_OF_REGISTRATION_FEE Effective date: 20241206 |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: N-4-6-H10-H13-oth-PC1903 Ip right cessation event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE Not in force date: 20241206 |