JP7613232B2 - 部品バラシ装置および部品バラシ装置の制御方法 - Google Patents
部品バラシ装置および部品バラシ装置の制御方法 Download PDFInfo
- Publication number
- JP7613232B2 JP7613232B2 JP2021072399A JP2021072399A JP7613232B2 JP 7613232 B2 JP7613232 B2 JP 7613232B2 JP 2021072399 A JP2021072399 A JP 2021072399A JP 2021072399 A JP2021072399 A JP 2021072399A JP 7613232 B2 JP7613232 B2 JP 7613232B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- motors
- mounting surface
- disassembly device
- rotation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23P—METAL-WORKING NOT OTHERWISE PROVIDED FOR; COMBINED OPERATIONS; UNIVERSAL MACHINE TOOLS
- B23P19/00—Machines for simply fitting together or separating metal parts or objects, or metal and non-metal parts, whether or not involving some deformation; Tools or devices therefor so far as not provided for in other classes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1602—Program controls characterised by the control system, structure, architecture
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1694—Program controls characterised by use of sensors other than normal servo-feedback from position, speed or acceleration sensors, perception control, multi-sensor controlled systems, sensor fusion
- B25J9/1697—Vision controlled systems
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Automation & Control Theory (AREA)
- Manipulator (AREA)
- Jigging Conveyors (AREA)
- Feeding Of Articles To Conveyors (AREA)
- Automatic Assembly (AREA)
- Mixers With Rotating Receptacles And Mixers With Vibration Mechanisms (AREA)
- Apparatuses For Generation Of Mechanical Vibrations (AREA)
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
Description
本実施形態では、部品バラシ装置と、部品バラシ装置の制御方法との特徴的な例について説明する。図1に示すように、ロボット組立てシステム1はロボット2が複数の部品を組み立てるシステムである。ロボット2にはスカラーロボット、垂直多関節ロボット、直交ロボット等が用いられる。ロボット2はロボットコントローラー3を備える。ロボットコントローラー3はロボット2の姿勢を制御する。
図9に示すように、Z正方向から見て、第1モーター17は第1偏心重り27を反時計回りに回転させる。Z正方向から見て、第2モーター18は第2偏心重り28を時計回りに回転させる。この動作の場合、位相を合わせてから、互いに逆回転させる必要がある。
前記第1実施形態では、第3回転軸19aの両側に第3偏心重り24が設置された。偏心重りは回転軸の片側だけでもよい。部品数を減らすことができる。
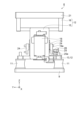
前記第1実施形態では、第1モーター17、第3モーター19、第2モーター18がこの順に直線上に並べて配置された。他にも、X正方向に第1モーター17及び第2モーター18を配置し、X負方向に第3モーター19を配置しても良い。そして、第1モーター17及び第2モーター18を第3回転軸19aの軸方向に並べて配置しても良い。Z正方向から見たときに、第1モーター17、第2モーター18及び第3モーター19が占める領域を正方形に近づけることができる。
Claims (6)
- 部品が載置される載置面を有する載置台と、
回転軸を回転させて振動する3つのモーターと、
前記載置台及び3つの前記モーターを支持し、前記モーターの振動を前記載置台に伝達する支持部と、を備え、
1つの前記モーターの前記回転軸の軸方向が前記載置面に平行で、且つ、2つの前記モーターの前記回転軸の軸方向が前記載置面に対して垂直であることを特徴とする部品バラシ装置。 - 請求項1に記載の部品バラシ装置であって、
前記モーターは前記回転軸に対して偏心する偏心重りを前記回転軸に備えることを特徴とする部品バラシ装置。 - 請求項2に記載の部品バラシ装置であって、
前記モーターは前記回転軸の両側に前記偏心重りを備えることを特徴とする部品バラシ装置。 - 請求項1~3のいずれか一項に記載の部品バラシ装置であって、
前記載置面と垂直な方向から見るとき、前記回転軸の軸方向が前記載置面に平行な前記モーターは前記回転軸の軸方向が前記載置面に対して垂直である2つの前記モーターの間に配置されることを特徴とする部品バラシ装置。 - 請求項1~4のいずれか一項に記載の部品バラシ装置であって、
前記支持部を振動可能に支持するゴムを備えることを特徴とする部品バラシ装置。 - 部品が載置される載置面を有する載置台と、回転軸を回転させて振動する3つのモーターと、前記載置台及び3つの前記モーターを支持し、前記モーターの振動を前記載置台に伝達する支持部と、前記モーターの回転を制御する制御部と、を備え、1つの前記モーターの前記回転軸の軸方向が前記載置面に平行で、且つ、2つの前記モーターの前記回転軸の軸方向が前記載置面に対して垂直である部品バラシ装置の制御方法であって、
前記制御部は3つの前記モーターの回転数、回転方向、初期位相の少なくとも一つを独立して制御することを特徴とする部品バラシ装置の制御方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021072399A JP7613232B2 (ja) | 2021-04-22 | 2021-04-22 | 部品バラシ装置および部品バラシ装置の制御方法 |
| CN202510881333.8A CN120715948A (zh) | 2021-04-22 | 2022-04-20 | 零部件散开装置以及零部件散开装置的控制方法 |
| CN202210417027.5A CN115229845B (zh) | 2021-04-22 | 2022-04-20 | 零部件散开装置以及零部件散开装置的控制方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021072399A JP7613232B2 (ja) | 2021-04-22 | 2021-04-22 | 部品バラシ装置および部品バラシ装置の制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022166945A JP2022166945A (ja) | 2022-11-04 |
| JP7613232B2 true JP7613232B2 (ja) | 2025-01-15 |
Family
ID=83667665
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021072399A Active JP7613232B2 (ja) | 2021-04-22 | 2021-04-22 | 部品バラシ装置および部品バラシ装置の制御方法 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7613232B2 (ja) |
| CN (2) | CN115229845B (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN120588282B (zh) * | 2025-08-11 | 2025-10-28 | 绵阳职业技术学院 | 一种用于复杂工况采集的特殊作业机器人 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6705459B1 (en) | 1998-02-17 | 2004-03-16 | General Kinematics Corporation | Two-way vibratory feeder |
| JP2008131928A (ja) | 2006-10-23 | 2008-06-12 | Hiroyuki Ogawa | 混合装置 |
| JP2012516822A (ja) | 2009-02-05 | 2012-07-26 | アシリル エスエー | 構成部品を供給するためのシステム |
| CN209258963U (zh) | 2018-11-15 | 2019-08-16 | 鹤壁市煤化机械有限责任公司 | 双振源双台板超大量溜井放矿机 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2639686B2 (ja) * | 1988-04-17 | 1997-08-13 | 株式会社妙徳 | 振動部品整列装置 |
| JP2595294Y2 (ja) * | 1992-12-18 | 1999-05-24 | 株式会社東洋機械製作所 | 三次元振動機 |
| JP4131036B2 (ja) * | 1998-05-19 | 2008-08-13 | 神鋼電機株式会社 | 振動コンベヤ |
| US6851548B1 (en) * | 1999-07-30 | 2005-02-08 | Kinergy Corporation | Vibratory conveying apparatus adapted to be driven by a plurality of accumulatively phased pairs of rotating eccentric weights |
| US6948611B2 (en) * | 1999-07-30 | 2005-09-27 | Kinergy Corporation | Vibratory conveying apparatus adapted to be driven by accumulatively phased rotating eccentric weights |
| DE102011075418A1 (de) * | 2011-05-06 | 2012-11-08 | Robert Bosch Gmbh | Vorrichtung zum Bewegen und Positionieren eines Objekts im Raum |
| JP5839452B2 (ja) * | 2011-08-23 | 2016-01-06 | 大和製衡株式会社 | 振動搬送装置及びそれを用いた粉粒体混合システム |
| CN102717034B (zh) * | 2012-04-27 | 2014-10-29 | 安徽中兴华汉机械有限公司 | 一种振实台 |
| JP2013255959A (ja) * | 2012-06-12 | 2013-12-26 | Seiko Epson Corp | 移動機構、電子部品搬送装置、電子部品検査装置 |
| JP2013255958A (ja) * | 2012-06-12 | 2013-12-26 | Seiko Epson Corp | ロボットハンド、およびロボット |
| MX363132B (es) * | 2014-09-19 | 2019-03-12 | Ishida Seisakusho | Dispositivo de dispersion y suministro y dispositivo de pesaje de combinacion. |
| JP7104395B2 (ja) * | 2016-11-30 | 2022-07-21 | 共栄製作株式会社 | 振動フィーダ |
| CN208289381U (zh) * | 2018-05-23 | 2018-12-28 | 中山振天自动化有限公司 | 带有全自动智能打螺钉机构的变速箱全自动智能组装线 |
-
2021
- 2021-04-22 JP JP2021072399A patent/JP7613232B2/ja active Active
-
2022
- 2022-04-20 CN CN202210417027.5A patent/CN115229845B/zh active Active
- 2022-04-20 CN CN202510881333.8A patent/CN120715948A/zh active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6705459B1 (en) | 1998-02-17 | 2004-03-16 | General Kinematics Corporation | Two-way vibratory feeder |
| JP2008131928A (ja) | 2006-10-23 | 2008-06-12 | Hiroyuki Ogawa | 混合装置 |
| JP2012516822A (ja) | 2009-02-05 | 2012-07-26 | アシリル エスエー | 構成部品を供給するためのシステム |
| CN209258963U (zh) | 2018-11-15 | 2019-08-16 | 鹤壁市煤化机械有限责任公司 | 双振源双台板超大量溜井放矿机 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN120715948A (zh) | 2025-09-30 |
| CN115229845A (zh) | 2022-10-25 |
| JP2022166945A (ja) | 2022-11-04 |
| CN115229845B (zh) | 2025-06-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4026632B2 (ja) | 小型飛行体 | |
| JP7613232B2 (ja) | 部品バラシ装置および部品バラシ装置の制御方法 | |
| KR101345869B1 (ko) | 3차원 진동 시험기 | |
| JP2013121192A (ja) | アクチュエーター、ロボットハンド、ロボット、電子部品搬送装置、電子部品検査装置およびプリンター | |
| EP0446378A1 (en) | Manipulator using flat pulse motor | |
| JP7613242B2 (ja) | 部品バラシ装置および部品バラシ装置の制御方法 | |
| JP2006193027A (ja) | 飛行体 | |
| CN218289483U (zh) | 一种分板机构 | |
| CN117142014A (zh) | 振动产生装置及拾取系统 | |
| JP5958013B2 (ja) | アクチュエーターおよびロボット | |
| JP2010201606A (ja) | 搬送装置 | |
| CN117429845A (zh) | 振动产生装置及拾取系统 | |
| JP6833153B1 (ja) | 面倒れ量検出装置、制御装置およびレーザ加工装置 | |
| KR0161019B1 (ko) | 부품 정렬 장치 | |
| TW202241784A (zh) | 高效供料系統 | |
| JP5991909B2 (ja) | ロータリー式パーツ整列機 | |
| CN113405000A (zh) | 一种驱动模组、微云台以及驱动模组的控制方法 | |
| KR101552443B1 (ko) | 물체 피딩 장치 | |
| US20250256397A1 (en) | Robot And Robot System | |
| JP7654288B2 (ja) | 上下振動装置、上下振動方法、部品供給装置、部品供給方法、及び、スクリーン印刷装置 | |
| JP3599212B2 (ja) | 揺動式パーツ整列機およびその防振方法 | |
| WO2025134469A1 (ja) | チップ保持装置、チップ保持方法、および、半導体装置の製造装置 | |
| JP2025152927A (ja) | ロボットおよびロボットシステム | |
| JP2010100401A (ja) | 振込み装置 | |
| JP2025152933A (ja) | ロボットおよびロボットシステム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20210915 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20211104 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240311 |
|
| TRDD | Decision of grant or rejection written | ||
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20241119 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241126 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241209 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7613232 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |