JP7342425B2 - ロボット管理システムおよびロボット管理システムの制御方法 - Google Patents
ロボット管理システムおよびロボット管理システムの制御方法 Download PDFInfo
- Publication number
- JP7342425B2 JP7342425B2 JP2019101032A JP2019101032A JP7342425B2 JP 7342425 B2 JP7342425 B2 JP 7342425B2 JP 2019101032 A JP2019101032 A JP 2019101032A JP 2019101032 A JP2019101032 A JP 2019101032A JP 7342425 B2 JP7342425 B2 JP 7342425B2
- Authority
- JP
- Japan
- Prior art keywords
- robot
- time
- backup
- backup data
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F11/00—Error detection; Error correction; Monitoring
- G06F11/07—Responding to the occurrence of a fault, e.g. fault tolerance
- G06F11/14—Error detection or correction of the data by redundancy in operation
- G06F11/1402—Saving, restoring, recovering or retrying
- G06F11/1415—Saving, restoring, recovering or retrying at system level
- G06F11/1438—Restarting or rejuvenating
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1674—Programme controls characterised by safety, monitoring, diagnostic
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F11/00—Error detection; Error correction; Monitoring
- G06F11/07—Responding to the occurrence of a fault, e.g. fault tolerance
- G06F11/14—Error detection or correction of the data by redundancy in operation
- G06F11/1402—Saving, restoring, recovering or retrying
- G06F11/1446—Point-in-time backing up or restoration of persistent data
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1602—Programme controls characterised by the control system, structure, architecture
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1679—Programme controls characterised by the tasks executed
- B25J9/1682—Dual arm manipulator; Coordination of several manipulators
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/418—Total factory control, i.e. centrally controlling a plurality of machines, e.g. direct or distributed numerical control [DNC], flexible manufacturing systems [FMS], integrated manufacturing systems [IMS] or computer integrated manufacturing [CIM]
- G05B19/4184—Total factory control, i.e. centrally controlling a plurality of machines, e.g. direct or distributed numerical control [DNC], flexible manufacturing systems [FMS], integrated manufacturing systems [IMS] or computer integrated manufacturing [CIM] characterised by fault tolerance, reliability of production system
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B23/00—Testing or monitoring of control systems or parts thereof
- G05B23/02—Electric testing or monitoring
- G05B23/0205—Electric testing or monitoring by means of a monitoring system capable of detecting and responding to faults
- G05B23/0259—Electric testing or monitoring by means of a monitoring system capable of detecting and responding to faults characterized by the response to fault detection
- G05B23/0264—Control of logging system, e.g. decision on which data to store; time-stamping measurements
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B23/00—Testing or monitoring of control systems or parts thereof
- G05B23/02—Electric testing or monitoring
- G05B23/0205—Electric testing or monitoring by means of a monitoring system capable of detecting and responding to faults
- G05B23/0259—Electric testing or monitoring by means of a monitoring system capable of detecting and responding to faults characterized by the response to fault detection
- G05B23/0267—Fault communication, e.g. human machine interface [HMI]
- G05B23/0272—Presentation of monitored results, e.g. selection of status reports to be displayed; Filtering information to the user
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F11/00—Error detection; Error correction; Monitoring
- G06F11/07—Responding to the occurrence of a fault, e.g. fault tolerance
- G06F11/14—Error detection or correction of the data by redundancy in operation
- G06F11/1402—Saving, restoring, recovering or retrying
- G06F11/1446—Point-in-time backing up or restoration of persistent data
- G06F11/1448—Management of the data involved in backup or backup restore
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F11/00—Error detection; Error correction; Monitoring
- G06F11/07—Responding to the occurrence of a fault, e.g. fault tolerance
- G06F11/14—Error detection or correction of the data by redundancy in operation
- G06F11/1402—Saving, restoring, recovering or retrying
- G06F11/1446—Point-in-time backing up or restoration of persistent data
- G06F11/1458—Management of the backup or restore process
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/31—From computer integrated manufacturing till monitoring
- G05B2219/31333—Database to backup and restore factory controllers
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2201/00—Indexing scheme relating to error detection, to error correction, and to monitoring
- G06F2201/84—Using snapshots, i.e. a logical point-in-time copy of the data
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P90/00—Enabling technologies with a potential contribution to greenhouse gas [GHG] emissions mitigation
- Y02P90/02—Total factory control, e.g. smart factories, flexible manufacturing systems [FMS] or integrated manufacturing systems [IMS]
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Quality & Reliability (AREA)
- General Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Human Computer Interaction (AREA)
- Manufacturing & Machinery (AREA)
- Manipulator (AREA)
Description
前記制御装置と接続され、前記制御装置を管理する管理装置と、
を有し、
前記管理装置は、
前記バックアップ生成部が前記バックアップデータを生成した生成時刻を取得する取得部と、
前記生成時刻と現在の時刻との差が第1所定値以上であるとき、報知内容を表示部に表示させる表示制御部と、
を備えることを特徴とする。
まず、第1実施形態について説明する。
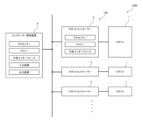
図1に示すロボット管理システム100は、ロボット1の駆動を制御するロボットコントローラー5と、ロボットコントローラー5を管理するコントローラー管理装置6と、を有している。
1.1.1 ロボット
図1に示すロボット1は、いわゆる6軸の垂直多関節ロボットであり、基台110と、基台110に接続されたロボットアーム10と、を有する。
図2に示すロボットコントローラー5は、ロボット1の駆動を制御する機能を有し、対応するロボット1に対して、通信可能に接続されている。
通信部51は、ロボットコントローラー5とこれに対応するロボット1との通信、および、ロボットコントローラー5とコントローラー管理装置6との通信を行う。
図2に示すコントローラー管理装置6は、複数のロボットコントローラー5と接続され、これらを一括して管理する。なお、コントローラー管理装置6は、1つのロボットコントローラー5に接続されていてもよい。
通信部61は、コントローラー管理装置6と各ロボットコントローラー5との通信を行う。
受付部68は、エラー判定部64がバックアップ時刻エラー情報を生成する際に用いる第1所定値等を外部から受け付ける。受け付けた第1所定値は、保存部65に保存する。
次に、ロボット管理システム100の制御方法について説明する。
次に、第2実施形態について説明する。
図8に示すステップS5では、ステップS4における判定の結果、バックアップデータ8の生成時刻と現在の時刻との差が第1所定値以上であった場合、ステップS5に移行する。図8に示すステップS5では、コントローラー管理装置6のバックアップ指令部69が、ロボットコントローラー5のイベント処理部58にバックアップ指令を出力する。つまり、バックアップ生成部55によるバックアップデータ8の生成を実行させる。これにより、バックアップ生成部55によって新たなバックアップデータ8が生成される。
次に、第3実施形態について説明する。
Claims (9)
- ロボットを制御するロボット制御部と、前記ロボットを制御するプログラムを保存するプログラム保存部と、前記プログラムを含むバックアップデータを生成するバックアップ生成部と、前記バックアップデータが保存されるバックアップ保存部と、を備える制御装置と、
前記制御装置と接続され、前記制御装置を管理する管理装置と、
を有し、
前記管理装置は、
前記バックアップ生成部が前記バックアップデータを生成した生成時刻を取得する取得部と、
前記生成時刻と現在の時刻との差が第1所定値以上であるとき、前記生成時刻と前記現在の時刻との差が前記第1所定値以上であること、または、前記バックアップデータの更新を促す案内を表示部に表示させる表示制御部と、
を備え、
前記取得部は、第1時刻、および前記第1時刻より後の第2時刻に、それぞれ摩耗量に関する情報を取得する機能を有し、
前記第1時刻に取得された前記摩耗量に関する情報と、前記第2時刻に取得された前記摩耗量に関する情報と、を比較し、前記摩耗量に関する情報の変化量が前記ロボットの部品の摩耗量に伴う交換条件以上であるとき、前記管理装置は、前記表示制御部が前記案内を前記表示部に表示させる時期を変更させることを特徴とするロボット管理システム。 - ロボットを制御するロボット制御部と、前記ロボットを制御するプログラムを保存するプログラム保存部と、前記プログラムを含むバックアップデータを生成するバックアップ生成部と、前記バックアップデータが保存されるバックアップ保存部と、を備える制御装置と、
前記制御装置と接続され、前記制御装置を管理する管理装置と、
を有し、
前記管理装置は、
前記バックアップ生成部が前記バックアップデータを生成した生成時刻を取得する取得部と、
前記生成時刻と現在の時刻との差が第1所定値以上であるとき、前記バックアップ生成部に新たな前記バックアップデータの生成を実行させる実行部と、
を備え、
前記取得部は、第1時刻、および前記第1時刻より後の第2時刻に、それぞれ摩耗量に関する情報を取得する機能を有し、
前記第1時刻に取得された前記摩耗量に関する情報と、前記第2時刻に取得された前記摩耗量に関する情報と、を比較し、前記摩耗量に関する情報の変化量が前記ロボットの部品の摩耗量に伴う交換条件以上であるとき、前記管理装置は、前記バックアップ生成部が前記バックアップデータを生成する時期を変更させることを特徴とするロボット管理システム。 - 前記バックアップ生成部は、前記ロボットの動作が停止しているとき、前記バックアップデータを生成する請求項1または2に記載のロボット管理システム。
- 前記管理装置は、前記第1所定値を外部から受け付ける受付部を備える請求項1ないし3のいずれか1項に記載のロボット管理システム。
- 前記バックアップデータは、さらに、前記制御装置の状態、前記ロボットの状態、前記ロボットの制御用ポイントデータ、前記ロボットのエラー発生履歴、前記制御装置の設定情報、およびセンサーデータ情報のうちの少なくとも1つデータを含み、
前記取得部は、前記ロボットの連続稼働時間、前記ロボットの累積稼働時間、前記ロボットの部品消耗情報、前記ロボットのエラー発生履歴、前記ロボットのトルク情報、および前記ロボットのセンサー情報のうちの少なくとも1つの情報を取得する機能を有し、
前記取得部により取得された前記情報に基づいて、前記管理装置は、前記時期を変更させる請求項1ないし4のいずれか1項に記載のロボット管理システム。 - 前記取得部は、前記第1時刻、および前記第2時刻に、それぞれ前記情報を取得し、
前記第1時刻に取得された前記情報と、前記第2時刻に取得された前記情報と、を比較し、前記情報の変化量が第2所定値以上であるとき、前記管理装置は、前記時期を変更させる請求項5に記載のロボット管理システム。 - ロボットを制御する制御装置と、前記制御装置と接続され、前記制御装置を管理する管理装置と、を有するロボット管理システムの制御方法であって、
前記制御装置が、前記ロボットを制御するプログラムを含むバックアップデータを生成し、保存するステップと、
前記管理装置が、前記バックアップデータを生成した生成時刻を前記制御装置から取得するステップと、
前記生成時刻と現在の時刻との差が第1所定値以上であるとき、前記管理装置が、前記生成時刻と前記現在の時刻との差が前記第1所定値以上であること、または、前記バックアップデータの更新を促す案内を表示部に表示させるステップと、
を有し、
前記管理装置が、第1時刻、および前記第1時刻より後の第2時刻に、それぞれ摩耗量に関する情報を取得し、前記第1時刻に取得された前記摩耗量に関する情報と、前記第2時刻に取得された前記摩耗量に関する情報と、を比較し、前記摩耗量に関する情報の変化量が前記ロボットの部品の摩耗量に伴う交換条件以上であるとき、前記表示部に表示させる時期を変更させるステップと、
を有することを特徴とするロボット管理システムの制御方法。 - ロボットを制御する制御装置と、前記制御装置と接続され、前記制御装置を管理する管理装置と、を有するロボット管理システムの制御方法であって、
前記制御装置が、前記ロボットを制御するプログラムを含むバックアップデータを生成し、保存するステップと、
前記管理装置が、前記バックアップデータを生成した生成時刻を前記制御装置から取得するステップと、
前記生成時刻と現在の時刻との差が第1所定値以上であるとき、前記管理装置が、前記制御装置に新たな前記バックアップデータの生成を実行させるステップと、
を有し、
前記管理装置が、第1時刻、および前記第1時刻より後の第2時刻に、それぞれ摩耗量に関する情報を取得し、前記第1時刻に取得された前記摩耗量に関する情報と、前記第2時刻に取得された前記摩耗量に関する情報と、を比較し、前記摩耗量に関する情報の変化量が前記ロボットの部品の摩耗量に伴う交換条件以上であるとき、前記バックアップデータを生成する時期を変更させるステップと、
を有することを特徴とするロボット管理システムの制御方法。 - ロボットを制御するロボット制御部と、前記ロボットを制御するプログラムを保存するプログラム保存部と、前記プログラムを含むバックアップデータを生成するバックアップ生成部と、前記バックアップデータが保存されるバックアップ保存部と、を備える制御装置と、
前記制御装置と接続され、前記制御装置を管理する管理装置と、
を有し、
前記管理装置は、
前記バックアップ生成部が前記バックアップデータを生成した生成時刻を取得する取得部と、
前記生成時刻と現在の時刻との差が第1所定値以上であるとき、前記生成時刻と前記現在の時刻との差が前記第1所定値以上であること、または、前記バックアップデータの更新を促す案内を表示部に表示させる表示制御部と、
を備え、
前記バックアップデータには、センサーデータ情報が含まれることを特徴とするロボット管理システム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019101032A JP7342425B2 (ja) | 2019-05-30 | 2019-05-30 | ロボット管理システムおよびロボット管理システムの制御方法 |
| CN202010461420.5A CN112015589B (zh) | 2019-05-30 | 2020-05-27 | 机器人管理系统及机器人管理系统的控制方法 |
| US16/886,834 US11628570B2 (en) | 2019-05-30 | 2020-05-29 | Robot management system and control method for robot management system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019101032A JP7342425B2 (ja) | 2019-05-30 | 2019-05-30 | ロボット管理システムおよびロボット管理システムの制御方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2020192657A JP2020192657A (ja) | 2020-12-03 |
| JP2020192657A5 JP2020192657A5 (ja) | 2022-05-02 |
| JP7342425B2 true JP7342425B2 (ja) | 2023-09-12 |
Family
ID=73507145
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019101032A Active JP7342425B2 (ja) | 2019-05-30 | 2019-05-30 | ロボット管理システムおよびロボット管理システムの制御方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11628570B2 (ja) |
| JP (1) | JP7342425B2 (ja) |
| CN (1) | CN112015589B (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7528627B2 (ja) * | 2020-08-20 | 2024-08-06 | セイコーエプソン株式会社 | ロボット監視システム、データサーバー及びデータサーバーの処理方法 |
| DE112022001893T5 (de) * | 2021-04-01 | 2024-01-25 | Sanctuary Cognitive Systems Corporation | Konfiguration und management von flotten dynamischer mechanischer systeme |
| WO2023286176A1 (ja) * | 2021-07-13 | 2023-01-19 | ファナック株式会社 | 教示操作盤、ロボットシステム、及びロボット制御装置 |
| CN114029942A (zh) * | 2021-09-29 | 2022-02-11 | 西门子(中国)有限公司 | 机器人运行的控制及监视方法、装置及计算机可读存储介质 |
| KR102663681B1 (ko) * | 2021-12-30 | 2024-05-14 | 주식회사 클로봇 | 페일 오버 매니저를 포함하는 로봇 관리 시스템, 및 이를 이용한 로봇 관리 방법 |
| JP2023103896A (ja) * | 2022-01-14 | 2023-07-27 | セイコーエプソン株式会社 | トラブル復帰手段の提示システム、トラブル復帰手段の提示方法およびトラブル復帰手段の提示プログラム |
| JP2023157499A (ja) * | 2022-04-15 | 2023-10-26 | セイコーエプソン株式会社 | ロボット管理システム、ロボット管理装置、及びロボット管理方法 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20040103168A1 (en) | 2002-11-25 | 2004-05-27 | Honda Giken Kogyo Kabushiki Kaisha | Method and system for backing up programmable logic controllers over network |
| JP2006281421A (ja) | 2005-04-05 | 2006-10-19 | Yaskawa Electric Corp | ロボットおよびロボットの異常検出方法 |
| JP2007190663A (ja) | 2006-01-23 | 2007-08-02 | Seiko Epson Corp | メンテナンス方法及びロボットコントローラ |
| JP2010092927A (ja) | 2008-10-03 | 2010-04-22 | Dainippon Screen Mfg Co Ltd | 基板処理装置、基板処理装置のための装置情報保存方法およびプログラム、ならびにそのプログラムを記録した記録媒体 |
| JP2012058937A (ja) | 2010-09-08 | 2012-03-22 | Hitachi-Ge Nuclear Energy Ltd | 原子力プラントの機器診断方法および機器診断装置 |
| JP2014102636A (ja) | 2012-11-19 | 2014-06-05 | Toshiba Corp | データ保全装置およびその方法、システム |
| WO2016071974A1 (ja) | 2014-11-05 | 2016-05-12 | 三菱電機株式会社 | リモート制御装置および制御システム |
| WO2017077654A1 (ja) | 2015-11-06 | 2017-05-11 | 三菱電機株式会社 | プログラマブルコントローラ、制御システム及び制御方法 |
| WO2019087484A1 (ja) | 2017-10-30 | 2019-05-09 | ソニー株式会社 | 情報処理装置、情報処理方法、およびプログラム |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS50156167A (ja) * | 1974-06-10 | 1975-12-17 | ||
| JPH0281203A (ja) | 1988-09-19 | 1990-03-22 | Tokico Ltd | ロボット制御システム |
| JPH0537490U (ja) * | 1991-10-21 | 1993-05-21 | 株式会社不二越 | 産業用ロボツトの制御装置 |
| JPH11296224A (ja) * | 1998-04-07 | 1999-10-29 | Mitsubishi Electric Corp | 被保全装置の予防保全方法 |
| CN101051285A (zh) * | 2006-09-21 | 2007-10-10 | 上海交通大学 | 计算机网络数据备份中文件匹配的方法 |
| JP2010079588A (ja) * | 2008-09-26 | 2010-04-08 | Hitachi Ltd | 仮想ボリュームを有する記憶制御装置 |
| US10616080B2 (en) | 2014-11-26 | 2020-04-07 | Fanuc America Corporation | System for diagnosis of robot state |
| JP6641233B2 (ja) | 2016-06-08 | 2020-02-05 | 三菱電機株式会社 | ロボット制御装置 |
| CN106708661B (zh) * | 2016-12-09 | 2020-05-19 | 浙江宇视科技有限公司 | 一种广域网环境中的数据备份方法及装置 |
| CN106991574A (zh) * | 2017-04-10 | 2017-07-28 | 上海云剑信息技术有限公司 | 机器人自我意识价值的商业模式 |
| CN107203441A (zh) * | 2017-08-01 | 2017-09-26 | 常州昊云工控科技有限公司 | 双备份数据存储装置及其工作方法、机器人 |
-
2019
- 2019-05-30 JP JP2019101032A patent/JP7342425B2/ja active Active
-
2020
- 2020-05-27 CN CN202010461420.5A patent/CN112015589B/zh active Active
- 2020-05-29 US US16/886,834 patent/US11628570B2/en active Active
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20040103168A1 (en) | 2002-11-25 | 2004-05-27 | Honda Giken Kogyo Kabushiki Kaisha | Method and system for backing up programmable logic controllers over network |
| JP2006281421A (ja) | 2005-04-05 | 2006-10-19 | Yaskawa Electric Corp | ロボットおよびロボットの異常検出方法 |
| JP2007190663A (ja) | 2006-01-23 | 2007-08-02 | Seiko Epson Corp | メンテナンス方法及びロボットコントローラ |
| JP2010092927A (ja) | 2008-10-03 | 2010-04-22 | Dainippon Screen Mfg Co Ltd | 基板処理装置、基板処理装置のための装置情報保存方法およびプログラム、ならびにそのプログラムを記録した記録媒体 |
| JP2012058937A (ja) | 2010-09-08 | 2012-03-22 | Hitachi-Ge Nuclear Energy Ltd | 原子力プラントの機器診断方法および機器診断装置 |
| JP2014102636A (ja) | 2012-11-19 | 2014-06-05 | Toshiba Corp | データ保全装置およびその方法、システム |
| WO2016071974A1 (ja) | 2014-11-05 | 2016-05-12 | 三菱電機株式会社 | リモート制御装置および制御システム |
| WO2017077654A1 (ja) | 2015-11-06 | 2017-05-11 | 三菱電機株式会社 | プログラマブルコントローラ、制御システム及び制御方法 |
| WO2019087484A1 (ja) | 2017-10-30 | 2019-05-09 | ソニー株式会社 | 情報処理装置、情報処理方法、およびプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020192657A (ja) | 2020-12-03 |
| US20200376652A1 (en) | 2020-12-03 |
| US11628570B2 (en) | 2023-04-18 |
| CN112015589B (zh) | 2024-03-22 |
| CN112015589A (zh) | 2020-12-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7342425B2 (ja) | ロボット管理システムおよびロボット管理システムの制御方法 | |
| CN110267770B (zh) | 机器人系统及其控制方法 | |
| CN107921640B (zh) | 远程操作机器人系统及其运转方法 | |
| JP4220979B2 (ja) | 制御装置の表示システム | |
| CN107107348B (zh) | 机器人保养支持装置及方法 | |
| EP2783808A2 (en) | Robot system, method for controlling robot, and method for producing to-be-processed material | |
| TWI521340B (zh) | 可程式邏輯控制器 | |
| JP2018062028A (ja) | モジュールの情報を追跡するロボットシステム及び保守方法 | |
| JP4461878B2 (ja) | 産業用ロボット | |
| JP2019107726A (ja) | ロボットシステム | |
| CN113635305A (zh) | 机器人运动保护方法、装置、控制器及存储介质 | |
| CN108778596B (zh) | 焊接机器人机构 | |
| JP2008059573A (ja) | 多重バイナリ入力を使用したロボットプログラミング制御 | |
| JP7343323B2 (ja) | 故障予測システム | |
| JP5058246B2 (ja) | 機械モデルを組み込まれた制御装置 | |
| JP7130369B2 (ja) | ロボットシステム | |
| JP5375436B2 (ja) | ロボットシステム | |
| CN112867975B (zh) | 维护辅助系统、数控装置及维护辅助系统的控制方法 | |
| TW201817562A (zh) | 機器人之運轉方法、電腦程式、及機器人系統 | |
| JP2020019079A (ja) | ロボットシステム | |
| JP2000176648A (ja) | 溶接制御装置 | |
| JP2023157499A (ja) | ロボット管理システム、ロボット管理装置、及びロボット管理方法 | |
| JP6396084B2 (ja) | エンジニアリング装置、エンジニアリングシステム、およびダウンロード処理方法 | |
| US20240012385A1 (en) | Control device | |
| WO2019220734A1 (ja) | ロボット装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD07 | Notification of extinguishment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7427 Effective date: 20200811 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20210915 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20211102 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220421 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220421 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230215 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230221 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230421 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230613 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230714 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230801 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230814 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7342425 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |