JP7337525B2 - 遠心式流体機械 - Google Patents
遠心式流体機械 Download PDFInfo
- Publication number
- JP7337525B2 JP7337525B2 JP2019058051A JP2019058051A JP7337525B2 JP 7337525 B2 JP7337525 B2 JP 7337525B2 JP 2019058051 A JP2019058051 A JP 2019058051A JP 2019058051 A JP2019058051 A JP 2019058051A JP 7337525 B2 JP7337525 B2 JP 7337525B2
- Authority
- JP
- Japan
- Prior art keywords
- impeller
- groove
- shape
- winding
- shaped groove
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




















Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D13/00—Pumping installations or systems
- F04D13/12—Combinations of two or more pumps
- F04D13/14—Combinations of two or more pumps the pumps being all of centrifugal type
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D29/00—Details, component parts, or accessories
- F04D29/40—Casings; Connections of working fluid
- F04D29/42—Casings; Connections of working fluid for radial or helico-centrifugal pumps
- F04D29/44—Fluid-guiding means, e.g. diffusers
Description
たとえば、特許文献1の遠心ポンプでは、渦巻状ケーシング内に形成されるスクロール流路について、舌部に近接する巻終わり部分の側壁に再循環路が設定されている。
そして、再循環路を設定することで、脈動などの不安定現象が起きやすい運転領域での安定した運転がもたらされる。
また、非特許文献1には、舌部の先端が、羽根車に接近するほど、再循環流れが減少すること、舌部の先端が羽根車に接近しすぎた場合には、舌部と羽根車後縁、および後縁流れとの干渉が増大し、脈動、騒音、サージなどの不都合が生じること、が示されている。
図1、図2に示すように、本実施形態の遠心式流体機械は、水などの液相流体を作動流体とする遠心ポンプPMPであり、いわゆる両吸込単弾渦巻ポンプで構成されている。
回転軸10は、図1、図2に示すように、丸棒形状に形成され、ケーシング30を貫きつつ、グランドパッキン32aを介して、ケーシング30に軸支されている。
このように軸支された回転軸10は、その一端に電動モータMの出力軸が連結されており、電動モータMが稼働することで、軸周りに回転する。
また、羽根車20は、主板21、側板22、翼23が一体に形成された、いわゆるクローズド形羽根車で構成されている。
なお、図3、図4では、遠心ポンプPMPの構成、および働きの理解を容易にするため、構成を一部省略して描いている。
そして、主板21は、回転軸10の軸心が双円錐形状の中心軸を貫いた状態で、固定されている。
また、主板21には、その各円錐面上に、複数の翼23が立設している。
側板22は、その内周面が、主板21の円錐面形状に倣った漏斗形状を備え、主板21の各円錐面21aに重ねられている。
そして、羽根車20は、主板21、翼23、側板22で囲まれた領域が、羽根車内流路20bに設定されている。
さらに、羽根車20は、その軸方向の中間部に位置し、径方向外側に向かって円環状に開口する大径側の開口部が、羽根車出口20cに設定されている。
また、ケーシング30は、ケース本体31、軸封部32、吸込部33、吸込流路34、供給室35、羽根車収容室36、渦巻流路37、吐出部38を備えている。
なお、各図中の矢印は、作動流体の流れる方向を示している。
ケース本体31は、下側本体31L、上側本体31Uの2部材に分割可能に構成されている。
軸封部32は、図2に示すように、グランドパッキン32a、パッキン押さえ32bを備えている。
グランドパッキン32aは、回転軸10を軸周りに回転可能に支持するための構成である。
パッキン押さえ32bは、回転軸10とケーシング30との間の隙間からの作動流体の漏出を防止するための構成である。
吸込部33は、図1、図3に示すように、外部からケーシング30内へ作動流体を導入するための入口部分を構成している。
また、吸込部33には、図外の外部配管等に連結する手段として、吸込側フランジ33aが設けられている。
吸込流路34は、図1~図3に示すように、吸込部33から導入された作動流体の流れを回転軸10の一側と他側の2本に分岐し、分岐した先で別々の供給室35に通じている。そして、分岐した各吸込流路34は、吸込部33から供給室35に向かって、回転軸10を中心とする渦巻状に旋回している。
また、2つの供給室35の間には、羽根車収容室36が配置されている。
そして、各供給室35は、羽根車収容室36に通じており、吸込流路34を流通してきた作動流体を羽根車収容室36へ供給する。
羽根車収容室36は、図2、図3に示すように、分岐した2本の吸込流路34の間に挟まれるように配置されており、羽根車20を回転軸10とともに回転可能な状態で内部に収容している。
収容壁36aは、羽根車20を間に挟むように一対の壁面で構成されている。
また、収容壁36aは、羽根車20を構成する側板22の外形形状に倣って漏斗状に湾曲しつつ、ケース本体31と一体に形成されている。
そして、収容壁36aは、小径側の開口部が収容室入口36b、大径側の開口部が収容室出口36c、にそれぞれ設定されている。
収容室入口36bの内周縁と羽根車入口20aの外周縁との間には、漏止手段36dが設置されている。
収容室出口36cは、漏斗形状を形成する各収容壁36aの大径側開口部が、羽根車出口20cを間に挟みつつ、互いに対峙することで、径方向外側に開口する円環状の開口部を形成している。
渦巻流路37は、図1、図2、図4に示すように、収容室出口36cの径方向外側、つまり羽根車出口20cの径方向外側に、羽根車20の外周に沿って、渦巻状に形成されている。
渦巻流路37は、収容室出口36cから径方向外側へ吐出された作動流体が合流してから、吐出部38までの流路を構成している。
なお、渦巻流路37の詳細については後述する。
吐出部38には、図外の外部配管等に連結する手段として、吐出側フランジ38aが設けられている。
なお、本実施形態のケーシング30の渦巻流路37では、図4において、回転軸10の軸心C10から垂下した直線を基準線LBと定義する。
また、本実施形態では、軸心C10を中心として、径方向に延出しつつ、反時計方向(以下、巻き方向Rと称する)に回転する半直線を旋回線LAと定義し、旋回線LAと基準線LBとのなす角度を巻角度θと定義する。
そして、巻角度θ=0°を渦巻流路37の巻始めに設定するとともに、巻き方向Rに1周(巻角度θ=360°)したところを渦巻流路37の巻終わりに設定する。
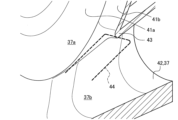
渦巻部41は、図2、図3に示すように、一対の側壁41a、周壁41bを備え、断面略台形形状を呈している。
なお、渦巻部41の断面形状は、断面略台形形状に限定されるものではない。たとえば、略楕円形、略円形、略逆三角形などのように、遠心ポンプPMPの仕様などに合わせて、様々な断面形状を適宜選択することが可能である。
一対の側壁41aは、各壁面が羽根車20の回転面に沿いつつ、羽根車出口20cを間に挟むように、対向配置されている。
周壁41bは、羽根車出口20cに面しつつ、一対の側壁41aの各径方向外側縁部を連結している。
さらに、周壁41bは、周方向には巻角度θ=約40°の位置、径方向には運転時に脈動が発生しない程度に、収容室出口36cに近接した位置を起点にして形成されている。
また、周壁41bは、起点から巻角度θ=360°まで羽根車20の外周を巻き方向Rに回転しつつ、羽根車20の外周から徐々に離れるように延びる、渦巻形状を形成している。
また、ディフューザ42は、連通部44を通じて、渦巻部41の巻始め側37aに連通している。
舌部43は、図3~図9に示すように、巻き方向Rとは逆向きに凸の略くさび形状を形成しつつ、周壁41bの起点側端縁とディフューザ42とを連結している。
そして、舌部43は、周壁41bの起点側端縁とディフューザ42とを連結するため、周壁41bの起点側端縁が設定された位置に配置されている。
また、舌部43は、回転軸10の軸方向に沿って、両側壁41aの壁面に直交するように、両側壁41aの間に形成されている(図8、図9参照)。
さらに、舌部43は、側壁41a間で回転軸10の径方向の寸法(以下、厚み寸法Tと称する)が一定となるように、設定されている。
連通部44は、巻始め側37aの連通方向外側に巻終わり側37bが重なる部位(巻角度θ=0°~約40°(舌部43の突端部分))の巻始め側37aと巻終わり側37bとの境界部分に設定されている。
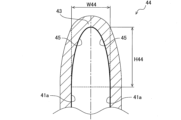
つまり、連通部44は、一対の側壁41aと舌部43とによって溝形状が構成されている。
さらに、連通部44は、溝開口部が巻角度θ=0°、溝底部が巻角度θ=約40°(舌部43の突端部分)に設定されたV字溝で形成されている。
そして、V字溝の溝底部は、舌部43の突端部分における、両側壁41aから等距離の位置に設定されている。
整流突起45の突出寸法L45は、巻角度θ=0°から巻角度θが大きくなるにつれて徐々に増大し、舌部43の突端部分(巻角度θ=約40°)で、両側壁41a間の中央に到達するように設定されている。
そして、整流突起45と舌部43とが連続する部位は、段差なく、滑らかに、且つ一体に形成されている。
また、整流突起45は、その厚み寸法Tが、回転軸10の軸方向に対して、一定となるように設定されている。
本実施形態の連通部44のV字溝形状は、二円弧法の手法に基づいて配置された、径の異なる2つの円の円弧によって構成されている。
つまり、V字溝形状は、径の小さな円(以下、小円CSと称する)が、径の大きな円(以下、大円CLと称する)に内接することで、2つの円弧が滑らかに連続した形を形成している。
つまり、小円CSは、その中心が、対称軸LC上に位置するように配置されるとともに、溝底部の円弧を構成している。
なお、整流突起45によって形成されるV字溝形状は、上述のような二円弧法の手法に基づいて構成された連続する円弧に限定されるものではなく、様々な形状に形成することが可能である。
そこで、整流突起45によって形成されるV字溝形状の別態様については、後述する。
次に、本実施形態に対する比較例について説明する。
比較例を例示することで、本実施形態の連通部44の構成、および特徴を明確にし、理解を容易にする。
なお、比較例として例示したケーシング30は、本実施形態の連通部44を見いだすにあたり、ベースとして採用した形態である。
<<舌部の構成>>
本比較例の舌部43の厚み寸法T(図13における上下方向の寸法)は、側壁41a近傍で厚く、側壁間中央で最も薄くなるように設定されている。
このため、図13に示すように、舌部43の突端部分は、舌部43を上流側から見た場合に、くびれ形状を呈している。
また、舌部43の突端部分は、作動流体の流れに対して直交するように、上流側に面しつつ、溝幅方向(図12、図13における左右方向)に沿った平坦面に構成されている。
本比較例の連通部44には、一対の側壁41aに、前述の実施形態における整流突起45に相当する構成が設定されていない。
つまり、図11、図12に示すように、比較例の連通部44は、一対の側壁41aの壁面と舌部43の突端部分とによって、矩形溝形状に形成されている。
連通部44が、前述のような矩形溝形状を形成していることで、作動流体は、渦巻部41からディフューザ42へ抜ける際、舌部43の突端部分の平坦面に正面から衝突し、その一部がせき止められる。
そして、舌部43がくびれ形状を形成しているために、作動流体が舌部43の突端部分に衝突した際に、せき止められる作動流体の流量が、側壁41a近傍では、側壁間中央よりも大きくなる。
そして、流通抵抗が悪化することで、渦巻部41からディフューザ42を通じて外部へ吐出されるはずの作動流体が、連通部44を通じて、渦巻部41の巻始め側37aへ再循環してしまうことになる。
つまり、比較例の連通部44の構成では、流れの滞る部位が発生するために、巻終わり側37bから巻始め側37aへの再循環量が増加し、運転効率が低下する。
前述の比較例に対して、本実施形態では、舌部43の突端部分の形状は、図8、図9に示すように、一方の側壁41aから他方の側壁41aにかけて、厚み寸法Tが一定に設定されている。
このため、流れが舌部43の突端部分に衝突した際に、回転軸10の軸方向の寸法について、舌部43の突端部分にせき止められる流量にばらつきがなくなり、流れの乱れが抑制される。
そして、図7に示すように、V字溝形状の内部に進入した作動流体は、溝開口部側から順に、溝壁部に対して斜めに衝突していき(矢印AR1)、最後に溝底部で正面から衝突する(矢印AR2)。
このため、比較例のように、正面から衝突し、流れがせき止められるような構成の場合よりも、流れの乱れが抑制される。
そして、流れの乱れが抑制されることで、作動流体はディフューザ42へ滞りなく流れるため、連通部44を通じて巻終わり側37bから巻始め側37aへ再循環する流れが減少する。
これによって、作動流体が舌部43の突端部分に正面からの衝突することに起因する流れの乱れが抑制される。
また、本実施形態では、連通部44に整流突起45を設定することで、V字溝形状を形成しているため、整流突起が設定されない場合よりも、径方向に連通する面積が縮小している。
これによって、クロスハッチCHで示される領域が塞がれて、巻終わり側37bと巻始め側37aとを連通する面積が縮小する。
そして、連通する面積が縮小することによって、作動流体が再循環する際の妨げとなり、再循環流量を低減することができる。
図14のグラフは、本実施形態と比較例とについて、前述の連通部の構成、および働きの違いによって生じる流量の差異を表したグラフである。
グラフの横軸は、吐出部38から吐出される作動流体の流量Qを、最大ポンプ効率流量Qbepによって無次元化したものである。
また、グラフの縦軸は、巻角度θ=45°に位置する渦巻部41の流路断面を通過する作動流体の流量Q45を、最大ポンプ効率流量Q45bepによって無次元化したものである。
そして、図14からは、3点の全ての流量で、巻角度θ=45°での流量が相対的に減少していることが認められた。
つまり、連通部44をより適切な形態に設定することで、通常の運転領域では、再循環流れが減少することが示されている。
本実施形態では、渦巻流路37の巻始め側37aと巻終わり側37bとを連通する連通部44が、溝壁部の内壁面に突設された整流突起45によって略V字溝形状に形成されている。
このため、比較例のように、整流突起45を備えずに、連通部44が矩形溝形状に形成された場合よりも、渦巻流路37の巻始め側37aと巻終わり側37bとが連通している部位の面積を小さくすることができる。
また、本実施形態では、連通部44がV字溝形状を備えることで、作動流体の流れは、舌部43の突端部分(溝底部)に衝突する前に、V字溝形状を形成する溝壁部に対して斜めに衝突する。
作動流体は、溝壁部に対して斜めに衝突することで、流れの勢いがいなされつつ、流れの向きを変える。
これによって、巻終わり側37bから巻始め側37aへの再循環流が減少し、再循環による損失を低減することができるとともに、遠心ポンプPMP(遠心式流体機械)を安定して運転することができる。
このような構成とすることで、作動流体が溝壁部に衝突した際に、変化する流れの角度をより小さくすることができる。
これによって、溝壁部への衝突によって生じる流れの乱れをさらに抑制することができる。
つまり、溝壁部を構成する整流突起45と、溝底部を構成する舌部43とが、二円弧法の手法に基づいて形成された曲線によって滑らかに連続するように形成されている。
このような構成とすることで、作動流体と整流突起45とが衝突する位置は、側壁41aの近傍から両側壁41a間の中央に向かうに従って、流れ方向の下流側へ徐々に移動する。つまり、作動流体と整流突起45との衝突する位置が流れ方向に分散される。
これによって、作動流体の脈動を防ぐとともに、流れの乱れを抑制し、流速差に起因する圧力損失を減らすことができる。
つまり、作動流体の流れの一部が連通部44に衝突する際に、流れをせき止めるように、流れに対して正面から衝突する溝底部が、両側壁41aから等距離の位置に設定されている。
なお、溝底部が一方の側壁41aに近接した位置に設定された場合には、圧力勾配が側壁間方向に非対称形状となるため、流れが乱れ易くなり、再循環する流れが増加する要因となる。
これによって、作動流体の流れが、舌部43に正面から衝突する際に、両側壁41a間でせき止められる流量にばらつきがなくなり、圧力差の発生、流れの乱れ、および舌部43近傍での流れの剥離が抑制される。
そして、流れの乱れ、および舌部43近傍での剥離が抑制されることで、再循環する流れを低減することができる。
つまり、巻始め側37aの径方向外側に巻終わり側37bが重なる範囲と一致するように、連通部44が設定されている。
これによって、巻終わり側37bから巻始め側37aへ通じる流路が確保しつつ、巻終わり側37bから巻始め側37aへ通じる面積が縮小されるため、脈動の発生を抑制しつつ、再循環する流れをさらに低減することができる。
次に、本実施形態の別態様について説明する。
前述の実施形態と以下の第1~第8の別態様とで異なる点は、連通部44の形成するV字溝形状のみであり、他の構成については同様のため、詳細な説明は省略する。
また、前述の実施形態と以下の第9の別態様とで異なる点は、舌部43、および連通部44がくびれ形状を形成している点のみであり、他の構成については同様のため、詳細な説明は省略する。
図15に示すように、本態様では、V字溝の溝形状が左右非対称形状に構成されている。
つまり本態様では、左右の各溝形状は、二円弧法の手法に基づいて形成されているが、溝底部側の円弧を構成する小円CSa、CSb、溝壁部側の円弧を構成する大円CLa、CLbの各径が、左右で異なっている。
また、V字溝の溝底部は、前述の実施形態と同様に、舌部43の突端部分における両側壁41aから等距離の位置に設定されている。
なお、一方の側壁41aから他方の側壁41aにかけて、厚み寸法Tは一定に設定されている(図8、図9参照)。
このような溝形状は、たとえば片吸込型などのように、左右で流速が異なりやすい形式の遠心ポンプPMPに対して好適である。
図16に示すように、本態様では、V字溝の溝形状が円弧と直線とで、左右対称形状に構成されている。
つまり本態様では、底溝部は円弧で構成され、溝壁部は直線で構成されている。
なお、一方の側壁41aから他方の側壁41aにかけて、厚み寸法Tは一定に設定されている(図8、図9参照)。
このような溝形状は、前述の実施形態のV字溝形状よりも流路断面積を小さくしたい場合に好適である。
図17に示すように、本態様では、V字溝の溝形状が三円弧法の手法に基づいて、左右対称形状に構成されている。
つまり本態様では、底溝部、溝壁部、溝開口部のそれぞれが、径の異なる3つの円(小円CS、中円CM、大円CL)によって構成され、それぞれの円弧が互いに接しつつ、連続している。
また、底溝部、溝壁部、溝開口部の順に円弧の径が大きくなるように、3つの円(小円CS、中円CM、大円CL)は、各径が設定されている。
このような溝形状は、前述の実施形態の整流突起45よりも溝壁部形状をより細かく設定したい場合、整流突起45を側壁41aから突出する部位をより滑らかに連続させたい場合、などに好適である。
図18に示すように、本態様では、V字溝の溝形状が楕円を用いて、左右対称に構成されている。
つまり本態様では、溝形状が1つの数式で表されている。
なお、一方の側壁41aから他方の側壁41aにかけて、厚み寸法Tは一定に設定されている(図8、図9参照)。
このような溝形状は、前述の実施形態のV字溝形状よりも流路断面積を小さくしたい場合、溝壁部形状をより滑らかに連続させたい場合、溝開口部と側壁41aとをより滑らかに連続させたい場合、などに好適である。
図19に示すように、本態様では、V字溝の溝形状が二次曲線を用いて、左右対称に構成されている。
つまり本態様では、溝形状が1つの数式で表されている。
なお、一方の側壁41aから他方の側壁41aにかけて、厚み寸法Tは一定に設定されている(図8、図9参照)。
このような溝形状は、前述の実施形態のV字溝形状よりも流路断面積を小さくしたい場合、溝壁部形状をより滑らかに連続させたい場合などに好適である。
図20に示すように、本態様では、V字溝の溝形状がベジェ曲線(スプライン曲線)を用いて、左右対称形状に構成されている。
ベジェ曲線は、コンピュータ上で曲線を描くために用いられる数式で、設定された複数の定義点PTをもとに曲線を表現する。
なお、一方の側壁41aから他方の側壁41aにかけて、厚み寸法Tは一定に設定されている(図8、図9参照)。
このような溝形状は、前述の実施形態のV字溝形状とは異なる任意の形状に設定したい場合、溝壁部と側壁41aとをより滑らかに連続させたい場合、などに好適である。
図21に示すように、本態様では、V字溝の溝形状が階段状に、且つ左右対称形状に構成されている。
つまり本態様では、溝壁部、溝底部が階段状に構成されている。
なお、一方の側壁41aから他方の側壁41aにかけて、厚み寸法Tは一定に設定されている(図8、図9参照)。
このような溝形状は、遠心ポンプPMPの容量が比較的大きい、ケーシング30の寸法が比較的大きいなど、V字溝形状を滑らかに連続させる加工が困難な場合などに好適である。
図22に示すように、本態様では、V字溝の溝形状が正規分布曲線を用いて、左右対称に構成されている。
つまり本態様では、溝形状が1つの数式で表されている。
なお、一方の側壁41aから他方の側壁41aにかけて、厚み寸法Tは一定に設定されている(図8、図9参照)。
このような溝形状は、前述の実施形態のV字溝形状よりも流路断面積を小さくしたい場合などに好適である。
たとえば、回転軸の軸線方向片側から作動流体を吸い込む片吸込ポンプ、多段ポンプ、ラインポンプなどの縦型ポンプ、電動モータMの回転速度が変更可能な可変速運転ポンプなどへの採用が可能である。さらに、作動流体の勢いで羽根車を回転させて、発電機を駆動するポンプ水車などへの採用が可能である。
たとえば、空気などの気相流体を作動流体として、採用することが可能である。
つまり、巻始め側37aと巻終わり側37bとが、連通部44を介して通じる渦巻流路37を備えた遠心式流体機械であれば、本願発明を採用することが可能であり、本実施形態と同様の作用効果を得ることができる。
10 回転軸
20 羽根車
30 ケーシング
31 ケース本体
37 渦巻流路
37a 巻始め側
37b 巻終わり側
41a 側壁
41b 周壁
43 舌部
44 連通部
R 巻き方向
H44 溝深さ寸法
W44 側壁間寸法
T 厚み寸法
Claims (1)
- 回転軸を介して、羽根車を回転可能に軸支するケース本体と、
該羽根車の径方向外側に、該羽根車の外周に沿って、渦巻状に形成された渦巻流路と、を具備するケーシングを備え、
該渦巻流路は、
該羽根車の回転面に沿って対向配置された一対の側壁と、
該一対の側壁の径方向外側縁部を跨ぐように連結しつつ、該羽根車の外周近傍を起点とし、該羽根車の外周に沿って巻き方向へ延在しつつ、該羽根車の外周から径方向外側へ徐々に離れる渦巻形状を呈する周壁と、
該周壁の起点側端縁に、該周壁の巻き方向とは逆向きに凸の略くさび形状を有する舌部と、
該一対の側壁と該舌部とによって、巻始め側と巻終わり側とを連通する溝形状に構成された連通部と、
を備えた遠心式流体機械であって、
該連通部は、
略V字溝形状に形成され、
該略V字溝形状は、
階段状に構成された
ことを特徴とする遠心式流体機械。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019058051A JP7337525B2 (ja) | 2019-03-26 | 2019-03-26 | 遠心式流体機械 |
| PCT/JP2019/046507 WO2020194871A1 (ja) | 2019-03-26 | 2019-11-28 | 遠心式流体機械 |
| TW108148282A TWI730567B (zh) | 2019-03-26 | 2019-12-30 | 離心式流體機械 |
| JP2023109023A JP2023121843A (ja) | 2019-03-26 | 2023-07-03 | 遠心式流体機械 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019058051A JP7337525B2 (ja) | 2019-03-26 | 2019-03-26 | 遠心式流体機械 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023109023A Division JP2023121843A (ja) | 2019-03-26 | 2023-07-03 | 遠心式流体機械 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020159256A JP2020159256A (ja) | 2020-10-01 |
| JP7337525B2 true JP7337525B2 (ja) | 2023-09-04 |
Family
ID=72608555
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019058051A Active JP7337525B2 (ja) | 2019-03-26 | 2019-03-26 | 遠心式流体機械 |
| JP2023109023A Pending JP2023121843A (ja) | 2019-03-26 | 2023-07-03 | 遠心式流体機械 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023109023A Pending JP2023121843A (ja) | 2019-03-26 | 2023-07-03 | 遠心式流体機械 |
Country Status (3)
| Country | Link |
|---|---|
| JP (2) | JP7337525B2 (ja) |
| TW (1) | TWI730567B (ja) |
| WO (1) | WO2020194871A1 (ja) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002081398A (ja) | 1999-11-04 | 2002-03-22 | Mitsubishi Heavy Ind Ltd | 遠心ポンプ |
| JP2015522128A (ja) | 2012-07-13 | 2015-08-03 | デルファイ・オートモーティブ・システムズ・ルクセンブルク・エスア | 渦巻き形状のケーシングを備えた換気デバイス |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019082392A1 (ja) * | 2017-10-27 | 2019-05-02 | 三菱電機株式会社 | 遠心送風機、送風装置、空気調和装置及び冷凍サイクル装置 |
-
2019
- 2019-03-26 JP JP2019058051A patent/JP7337525B2/ja active Active
- 2019-11-28 WO PCT/JP2019/046507 patent/WO2020194871A1/ja active Application Filing
- 2019-12-30 TW TW108148282A patent/TWI730567B/zh active
-
2023
- 2023-07-03 JP JP2023109023A patent/JP2023121843A/ja active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002081398A (ja) | 1999-11-04 | 2002-03-22 | Mitsubishi Heavy Ind Ltd | 遠心ポンプ |
| JP2015522128A (ja) | 2012-07-13 | 2015-08-03 | デルファイ・オートモーティブ・システムズ・ルクセンブルク・エスア | 渦巻き形状のケーシングを備えた換気デバイス |
Also Published As
| Publication number | Publication date |
|---|---|
| TWI730567B (zh) | 2021-06-11 |
| JP2020159256A (ja) | 2020-10-01 |
| JP2023121843A (ja) | 2023-08-31 |
| WO2020194871A1 (ja) | 2020-10-01 |
| TW202035876A (zh) | 2020-10-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2899405B1 (en) | Rotary machine | |
| JP4918192B2 (ja) | 燃料ポンプアセンブリ | |
| KR20150106002A (ko) | 터보머신들의 인접한 블레이드 요소들의 흐름장들의 결합을 가하는 구조들 및 방법들, 그리고 그들을 포함하는 터보머신들 | |
| KR101252984B1 (ko) | 고속 원심 펌프용 유동 벡터 제어기 | |
| US9551354B2 (en) | Regenerative-type fluid machinery having a guide vane on a channel wall | |
| WO2017138199A1 (ja) | 遠心圧縮機 | |
| KR20170096013A (ko) | 터빈 | |
| JP3841391B2 (ja) | ターボ機械 | |
| JP2007247622A (ja) | 遠心形ターボ機械 | |
| JP7337525B2 (ja) | 遠心式流体機械 | |
| CN107965473B (zh) | 包括具有开口的至少一个叶片的、用于流体压缩装置的扩散器 | |
| JP2010025041A (ja) | 遠心流体機械 | |
| EP3863759B1 (en) | Cavitation reactor and manufacturing method thereof | |
| US9546661B2 (en) | Rotor machine intended to function as a pump or an agitator and an impeller for such a rotor machine | |
| US10859092B2 (en) | Impeller and rotating machine | |
| JP5232721B2 (ja) | 遠心圧縮機 | |
| JP2008101553A (ja) | ウォーターポンプのインペラ | |
| JP6802770B2 (ja) | 流体機械 | |
| JP6740070B2 (ja) | 流体機械 | |
| JP2007051551A (ja) | 両吸込渦巻ポンプ | |
| JP2006170112A (ja) | 流体機械の不安定流動抑制装置 | |
| JP2018091317A (ja) | 多段ポンプ | |
| JP5748505B2 (ja) | 回転機械 | |
| JP6710597B2 (ja) | ポンプ | |
| US20230243364A1 (en) | Impeller and rotary machine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220315 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230221 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230417 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20230509 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230710 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20230719 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230815 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230823 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7337525 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |