JP7327680B2 - モータ制御装置 - Google Patents
モータ制御装置 Download PDFInfo
- Publication number
- JP7327680B2 JP7327680B2 JP2022541185A JP2022541185A JP7327680B2 JP 7327680 B2 JP7327680 B2 JP 7327680B2 JP 2022541185 A JP2022541185 A JP 2022541185A JP 2022541185 A JP2022541185 A JP 2022541185A JP 7327680 B2 JP7327680 B2 JP 7327680B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- power supply
- supply voltage
- rotation speed
- upper limit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters
- H02P27/08—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters with pulse width modulation
- H02P27/085—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters with pulse width modulation wherein the PWM mode is adapted on the running conditions of the motor, e.g. the switching frequency
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P23/00—Arrangements or methods for the control of AC motors characterised by a control method other than vector control
- H02P23/16—Controlling the angular speed of one shaft
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P2205/00—Indexing scheme relating to controlling arrangements characterised by the control loops
- H02P2205/07—Speed loop, i.e. comparison of the motor speed with a speed reference
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Ac Motors In General (AREA)
- Control Of Electric Motors In General (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Description
低下した電源電圧が上昇に転じたことを検出する検出部と、
検出部により電源電圧が上昇に転じたことが検出されたことに応じて、電源電圧の低下に応じて低下した実際のモータ回転速度が、時間の経過とともに、目標モータ回転速度に近づく接近速度が、初期の上昇速度は緩やかであるが、時間の経過とともに、その上昇速度が徐々に高まり、その後、上昇速度が徐々に低下するように、所定の関数を用いてモータへ印加するための印加電圧を生成する生成部と、を備え、
生成部が生成した印加電圧をモータに印加することにより、変動抑制制御が実行されるように構成される。
以下、第1実施形態に係るモータ制御装置について、図面を参照して説明する。本実施形態に係るモータ制御装置は、詳しくは後述するが、3相モータを駆動するための、電源から供給される電源電圧が一時的に低下し、その後、上昇して通常の電源電圧に復帰する際に、その電源電圧の変動に追従して3相モータの回転速度が変動することを抑制することができる。このため、本実施形態に係るモータ制御装置が制御対象とする3相モータは、例えば、車両の空調装置のブロワファンを回転させるファンモータとして好適に用いることができる。車載電源から供給される電源電圧が変動しても、ファンモータの回転速度の変動を抑制することができれば、例えば、車室内に吹き出される空調風の風量の変化に伴う騒音の発生が抑えられるためである。ただし、本実施形態に係るモータ制御装置の制御対象となる3相モータの用途はファンモータに限られない。すなわち、本実施形態に関わるモータ制御装置は、車両に搭載される各種の3相モータを制御対象としてもよい。また、車両以外の用途で用いられる3相モータを制御対象としてもよい。また、制御対象となるモータは3相モータ以外のモータであってもよい。
(数1)
VM limit(n)=VM limit(n-1)+2πFT(VDC-VM limit(n-1))
数式1において、Fはカットオフ周波数、Tはサンプリング周期を表している。また、VM limit(n-1)はモータ印加電圧上限の前回値、VM limit(n)はモータ印加電圧上限の今回値を表している。
(数2)
F=F0+F0C2
数式2において、F0はカットオフ周波数初期値、Cはカットオフ周波数カウンタを表している。カットオフ周波数カウンタCは、低下した電源電圧VDCが上昇に転じたことが検出されると、その検出に応じてカウント動作を開始する。カットオフ周波数カウンタCのカウント値を2乗してカットオフ周波数初期値F0と乗算することにより、数式2により算出されるカットオフ周波数Fは、図3に示すように、時間の経過とともに、その値が急激に増加するようになる。
次に、本開示の第2実施形態に係るモータ制御装置について、図面を参照して説明する。上述した第1実施形態に係るモータ制御装置10では、低下した電源電圧VDCが上昇する際に、モータ印加電圧に対する上限であるモータ印加電圧上限VM limitを定めることにより、実際のモータ回転速度ωの変動を抑制するものであった。
Claims (7)
- モータ(30、130)を駆動するための、電源から供給される電源電圧が一時的に低下し、その後、上昇して通常の電源電圧に復帰する際に、その電源電圧の変動に追従して前記モータの回転速度が変動することを抑制する変動抑制制御を実行するモータ制御装置(10、110)であって、
低下した電源電圧が上昇に転じたことを検出する検出部(S110、S210)と、
前記検出部により電源電圧が上昇に転じたことが検出されたことに応じて、電源電圧の低下に応じて低下した実際のモータ回転速度(ω)が、時間の経過とともに、目標モータ回転速度(ω*)に近づく接近速度が、初期の上昇速度は緩やかであるが、時間の経過とともに、上昇速度が徐々に高まり、その後、上昇速度が徐々に低下するように、所定の関数を用いて前記モータへ印加するための印加電圧を生成する生成部(16、18、20、22、116、118、120、122)と、を備え、
前記生成部が生成した印加電圧を前記モータに印加することにより、前記変動抑制制御が実行されるモータ制御装置。 - 前記モータはインバータを介してPWM制御されるものであり、
前記生成部(16、18、20、22)は、
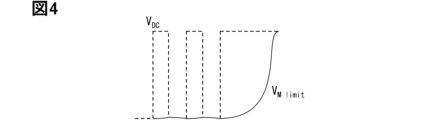
前記所定の関数を用いて、上昇に転じた時点の電源電圧から復帰後の通常の電源電圧に向けて、初期の上昇速度は緩やかであるが、時間の経過とともに、上昇速度が徐々に高まり、その後、上昇速度が徐々に低下するように変化するモータ印加電圧上限(VM limit)を設定する上限設定部(16)と、
電源電圧の上昇に係わらず、前記上限設定部が設定したモータ印加電圧上限(VM limit)に相当する印加電圧を前記モータに印加するためのPWMデューティを算出する算出部(18)と、
前記算出部によって算出されたPWMデューティに従ってインバータ(22)を駆動する駆動部(20)と、を備える請求項1に記載のモータ制御装置。 - 前記モータはインバータを介してPWM制御されるものであり、
前記生成部(116、118、120、122)は、
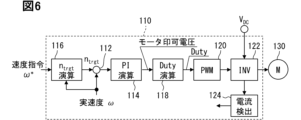
前記所定の関数を用いて、電源電圧が上昇に転じた時点の実際のモータ回転速度から目標モータ回転速度(ω*)に向けて、初期の上昇速度は緩やかであるが、時間の経過とともに、上昇速度が徐々に高まり、その後、上昇速度が徐々に低下するように変化する過渡目標モータ回転速度(ntrgt)を設定する過渡目標設定部(116)と、
電源電圧の上昇に係わらず、実際のモータ回転速度(ω)を前記過渡目標設定部が設定した過渡目標モータ回転速度(ntrgt)に追従して変化させるためのPWMデューティを算出する算出部(118)と、
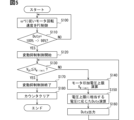
前記算出部によって算出されたPWMデューティに従ってインバータ(122)を駆動する駆動部(120)と、を備える請求項1に記載のモータ制御装置。 - PWMデューティが100%であるにも係わらず、実際のモータ回転速度(ω)が目標モータ回転速度(ω*)よりも低下し、その後、PWMデューティが100%から100%未満に変化したことをもって、前記検出部は、電源電圧が低下し、その低下した電源電圧が上昇に転じたことを検出する請求項2又は3に記載のモータ制御装置。
- 前記上限設定部が設定するモータ印加電圧上限(VM limit)が、復帰後の電源電圧(VDC)以上になったとき、前記変動抑制制御を終了する請求項2に記載のモータ制御装置。
- 前記過渡目標設定部が設定する過渡目標モータ回転速度(ntrgt)が目標モータ回転速度(ω*)に一致したとき、前記変動抑制制御を終了する請求項3に記載のモータ制御装置。
- 前記所定の関数は、時間の経過とともに、比例関係よりも大きく増加するカットオフ周波数を含む一次遅れ系の伝達関数である請求項1乃至6のいずれか1項に記載のモータ制御装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020131926 | 2020-08-03 | ||
| JP2020131926 | 2020-08-03 | ||
| PCT/JP2021/026503 WO2022030205A1 (ja) | 2020-08-03 | 2021-07-14 | モータ制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JPWO2022030205A1 JPWO2022030205A1 (ja) | 2022-02-10 |
| JPWO2022030205A5 JPWO2022030205A5 (ja) | 2022-11-07 |
| JP7327680B2 true JP7327680B2 (ja) | 2023-08-16 |
Family
ID=80117990
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022541185A Active JP7327680B2 (ja) | 2020-08-03 | 2021-07-14 | モータ制御装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20230114838A1 (ja) |
| JP (1) | JP7327680B2 (ja) |
| CN (1) | CN116057828A (ja) |
| DE (1) | DE112021004131T5 (ja) |
| WO (1) | WO2022030205A1 (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013088832A1 (ja) | 2011-12-15 | 2013-06-20 | 東芝キヤリア株式会社 | モータ駆動装置 |
| WO2013140500A1 (ja) | 2012-03-19 | 2013-09-26 | 株式会社安川電機 | モータ制御装置 |
| US9667185B2 (en) | 2013-06-11 | 2017-05-30 | Brose Fahrzeugteile Gmbh & Co. Kg, Wuerzburg | Method and device for operating an electromotive fan drive |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59148585A (ja) * | 1983-02-08 | 1984-08-25 | Mitsubishi Electric Corp | 電力変換装置の制御回路 |
| JPS6260499A (ja) * | 1985-09-10 | 1987-03-17 | Toshiba Corp | インバ−タ装置 |
| JP2020131926A (ja) | 2019-02-20 | 2020-08-31 | 日本精機株式会社 | 車両用表示装置 |
-
2021
- 2021-07-14 JP JP2022541185A patent/JP7327680B2/ja active Active
- 2021-07-14 WO PCT/JP2021/026503 patent/WO2022030205A1/ja active Application Filing
- 2021-07-14 DE DE112021004131.2T patent/DE112021004131T5/de active Pending
- 2021-07-14 CN CN202180058459.5A patent/CN116057828A/zh active Pending
-
2022
- 2022-12-14 US US18/065,706 patent/US20230114838A1/en active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013088832A1 (ja) | 2011-12-15 | 2013-06-20 | 東芝キヤリア株式会社 | モータ駆動装置 |
| WO2013140500A1 (ja) | 2012-03-19 | 2013-09-26 | 株式会社安川電機 | モータ制御装置 |
| US9667185B2 (en) | 2013-06-11 | 2017-05-30 | Brose Fahrzeugteile Gmbh & Co. Kg, Wuerzburg | Method and device for operating an electromotive fan drive |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2022030205A1 (ja) | 2022-02-10 |
| DE112021004131T5 (de) | 2023-06-29 |
| US20230114838A1 (en) | 2023-04-13 |
| WO2022030205A1 (ja) | 2022-02-10 |
| CN116057828A (zh) | 2023-05-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6085488B2 (ja) | 電動工具 | |
| JP5478620B2 (ja) | 変圧器の制御装置 | |
| JP4343235B2 (ja) | 車両用発電制御装置 | |
| EP1699130B1 (en) | Inverter unit | |
| JP2008219954A (ja) | 同期モータ駆動装置および方法 | |
| JP5595447B2 (ja) | 車輌用交流発電機の制御装置及び制御方法 | |
| JP2009106069A (ja) | 電動機制御装置 | |
| JP7327680B2 (ja) | モータ制御装置 | |
| JP7346957B2 (ja) | 充電制御装置 | |
| JP6343532B2 (ja) | 二次電池制御装置 | |
| JP5446836B2 (ja) | 電源装置および車両 | |
| US20220255491A1 (en) | Cooling control device | |
| JP4561219B2 (ja) | モータ駆動用インバータ制御装置およびそれを用いた空気調和機 | |
| US9667185B2 (en) | Method and device for operating an electromotive fan drive | |
| JP5298756B2 (ja) | 車両用電源装置 | |
| JP3935039B2 (ja) | 速度指令制御部及び電動車輌の速度制御装置 | |
| JP2022179106A (ja) | モータ駆動装置 | |
| JP6717048B2 (ja) | 電動機への電圧供給装置、及び、その制御方法 | |
| CN111431441B (zh) | 电机转速控制方法、装置、空调器及存储介质 | |
| EP3780382B1 (en) | Boost converter control method and control device | |
| CN111971894A (zh) | 用于操作功率转换器的方法,用于永久励磁电机、车辆和计算机程序产品的功率转换器 | |
| JP6464726B2 (ja) | 車両用電動シートシステムの制御装置 | |
| JP7419984B2 (ja) | 制御装置 | |
| CN113302571B (zh) | 光伏发电驱动系统及光伏发电驱动系统的控制方法 | |
| WO2022202806A1 (ja) | 同期電動機の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220906 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220906 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230704 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230717 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7327680 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |