CN116057828A - 马达控制装置 - Google Patents
马达控制装置 Download PDFInfo
- Publication number
- CN116057828A CN116057828A CN202180058459.5A CN202180058459A CN116057828A CN 116057828 A CN116057828 A CN 116057828A CN 202180058459 A CN202180058459 A CN 202180058459A CN 116057828 A CN116057828 A CN 116057828A
- Authority
- CN
- China
- Prior art keywords
- motor
- power supply
- rotation speed
- supply voltage
- voltage
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters
- H02P27/08—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters with pulse width modulation
- H02P27/085—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters with pulse width modulation wherein the PWM mode is adapted on the running conditions of the motor, e.g. the switching frequency
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P23/00—Arrangements or methods for the control of AC motors characterised by a control method other than vector control
- H02P23/16—Controlling the angular speed of one shaft
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P2205/00—Indexing scheme relating to controlling arrangements characterised by the control loops
- H02P2205/07—Speed loop, i.e. comparison of the motor speed with a speed reference
Abstract
马达控制装置(10)构成为根据降低的电源电压(VDC)转为上升这一情况,以使根据电源电压(VDC)的降低而降低了的实际的马达转速(ω)随着时间的经过而接近目标马达转速(ω*)的接近速度逐渐变高,然后,接近速度逐渐降低的方式,使用规定的函数生成用于向马达施加的施加电压,并通过将该生成的施加电压施加给马达来执行变动抑制控制。
Description
相关申请的交叉引用
该申请以2020年8月3日在日本申请的专利申请第2020-131926号为基础,通过参照的方式整体引用基础申请的内容。
技术领域
本公开涉及马达控制装置,在用于驱动马达的、从电源供给的电源电压暂时降低,然后上升并恢复到通常的电源电压时,执行抑制马达的转速追随该电源电压的变动而变动的变动抑制控制。
背景技术
例如,在专利文献1中记载有一种车辆的电动风扇的运转方法。根据该运转方法,在使电动风扇旋转的马达的驱动电压发生了变动(降低)的情况下,马达速度被调节成比没有电压变动的情况下的期望速度低的期望速度。该低的期望速度一直维持到驱动电压从降低恢复。而且,当驱动电压恢复到某程度的水平后经过了规定的时间时,期望速度从低的期望速度持续且直线性地增加至原始的速度。
现有技术文献
专利文献
专利文献1:美国专利号9667185
发明内容
根据上述专利文献1的技术,在驱动电压发生了变动的情况下,马达的转速被调节成比没有电压变动的情况下的期望速度低的速度,因此,能够避免马达的转速也以追随驱动电压的变动的方式而变动。
但是,在专利文献1的技术中,在驱动电压变动(降低)的期间,马达的转速被维持在作为一定值的低的期望速度,当电源电压恢复至某程度的水平后经过了规定的时间时,从该时点直线性地增加至原始的期望速度。因此,马达的转速的变化突然产生,该变化可能使车辆的乘员产生不适感。
本公开是鉴于上述的点而作出的,其目的在于提供一种马达控制装置,该马达控制装置在用于驱动马达的电源电压发生了变动时,能够抑制马达的转速的变动而不会使车辆的乘员产生不适感。
为了实现上述目的,本公开的马达控制装置在用于驱动马达的、从电源供给的电源电压暂时降低,然后上升并恢复到通常的电源电压时,执行抑制马达的转速追随该电源电压的变动而变动的变动抑制控制,其构成为具备:
检测部,其检测降低的电源电压转为上升;以及
生成部,其根据由检测部检测到电源电压转为上升这一情况,以使根据电源电压的降低而降低了的实际的马达转速随着时间的经过而接近目标马达转速的接近速度逐渐变高,然后接近速度逐渐降低的方式,使用规定的函数生成用于向马达施加的施加电压;
通过对马达施加生成部所生成的施加电压,执行变动抑制控制。
如上所述,根据本公开的马达控制装置,生成部使用规定的函数生成平滑地变化的马达施加电压。因此,能够抑制马达转速突然变化。由生成部生成的马达施加电压以使由于电源电压的降低而降低了的实际的马达转速随着时间的经过而接近目标马达转速的接近速度逐渐变高的方式生成。换言之,电源电压刚刚转为上升之后的初期的接近速度是缓慢的,因此,即使在电源电压反复变动的情况下,不管电源电压的变动如何,都能够将马达转速的变动抑制得较小。另外,在电源电压恢复到通常的电压并稳定下来的情况下,以使接近速度随着时间的经过而逐渐变高的方式生成马达施加电压,因此,能够使实际的马达转速快速地接近目标马达转速。进一步地,然后以使接近速度逐渐降低的方式生成马达施加电压,因此,能够使实际的马达转速缓慢地近似于目标马达转速。
此外,权利要求书中的括号内的参照编号只不过为了使本公开的理解容易而表示与后述的实施方式中的具体结构的对应关系的一个例子,丝毫没有限制本公开的范围的意图。
另外,关于上述的特征以外的、权利要求书的各权利要求所记载的技术特征,将从后述的实施方式的说明及附图中变得清楚。
附图说明
图1是表示第一实施方式的马达控制装置的结构的结构图。
图2是用于说明图1的马达控制装置的动作的波形图。
图3是用于说明马达施加电压上限VMlimit的说明图。
图4是表示在降低的电源电压VDC恢复到原始的电压值时反复进行降低、上升的情况下的马达施加电压上限VMlimit的变化的情形的波形图。
图5是表示由第一实施方式的马达控制装置执行的、抑制三相马达的转速追随电源电压VDC的变动而变动的变动抑制控制的处理内容的流程图。
图6是表示第二实施方式的马达控制装置的结构的结构图。
图7是用于说明图6的马达控制装置的动作的波形图。
图8是表示由第二实施方式的马达控制装置执行的、抑制三相马达的转速追随电源电压VDC的变动而变动的变动抑制控制的处理内容的流程图。
具体实施方式
<第一实施方式>
以下,参照附图对第一实施方式的马达控制装置进行说明。本实施方式的马达控制装置在后面详细叙述,能够在用于驱动三相马达的、从电源供给的电源电压暂时降低,然后上升并恢复到通常的电源电压时,抑制三相马达的转速追随该电源电压的变动而变动。因此,本实施方式的马达控制装置作为控制对象的三相马达例如能够很好地用作使车辆的空调装置的鼓风风扇旋转的风扇马达。这是因为,即使从车载电源供给的电源电压发生变动,只要能够抑制风扇马达的转速的变动,例如就可抑制与向车厢内吹出的空调风的风量的变化相伴的噪声的产生。但是,成为本实施方式的马达控制装置的控制对象的三相马达的用途不限于风扇马达。即,与本实施方式相关的马达控制装置也可以将搭载于车辆的各种三相马达作为控制对象。另外,也可以将车辆以外的用途中使用的三相马达作为控制对象。另外,成为控制对象的马达也可以是三相马达以外的马达。
图1表示第一实施方式的马达控制装置10的结构。如图1所示,马达控制装置10具备偏差运算部12、PI运算部14、作为上限设定部的马达施加电压上限(VMlimit)运算部16、作为计算部的Duty运算部18、作为驱动部的PWM驱动信号生成部20、逆变器22以及电流检测部24等。这些马达控制装置10的结构内的一部分、例如PI运算部14、VMlimit运算部16以及Duty运算部18等能够通过具有具备CPU、ROM、RAM等的一般结构的微机构成。
偏差运算部12运算从未图示的上级的控制装置赋予的目标马达转速ω*和实际的马达转速ω的偏差。运算的偏差被赋予给PI运算部14。PI运算部14通过比例积分控制(PI控制),运算与目标马达转速ω*和实际的马达转速ω的偏差对应的控制量作为马达施加电压。通过PWM控制对三相马达的各相的线圈施加该马达施加电压,由此,能够使实际的马达转速ω近似于目标马达转速ω*。此外,用于运算与目标马达转速ω*和实际的马达转速ω的偏差对应的控制量(马达施加电压)的控制规则不限定于PI控制,也可以采用其它的控制规则(例如,PID控制、PD控制等)。
VMlimit运算部16对于由PI运算部14运算的马达施加电压,运算被设定为上限电压的马达施加电压上限VMlimit。就VMlimit运算部16而言,只要不产生电源电压VDC的变动(从暂时性的降低向原始的电源电压VDC的恢复),就如图2所示运算与电源电压VDC相等的电压作为马达施加电压上限VMlimit。因此,如图1所示,VMlimit运算部16构成为取入电源电压VDC且可检测其电压值。或者,VMlimit运算部16也可以构成为在不产生电源电压VDC的变动的情况下不设定马达施加电压上限VMlimit。
但是,例如,在以负荷较高的状态使用了电动助力转向的情况下等,电力消耗较大的电气设备、电子设备进行了工作时,有时从车载蓄电池供给的电源电压VDC暂时性降低。在产生了这种电源电压VDC的变动的情况下,如图2所示,VMlimit运算部16运算马达施加电压上限VMlimit,该马达施加电压上限VMlimit从降低的电源电压VDC转为上升的时点t3的电压值朝向电源电压VDC恢复后的电压值以如下方式进行变化:初期的上升速度缓慢,但随着时间的经过,该上升速度逐渐变高,然后,上升速度逐渐降低,在时点t4,近似于恢复后的电压值。
这样变化的马达施加电压上限VMlimit例如能够使用将截止频率作为随着时间的经过而比比例关系更大幅度地增加的二次时间变量的一阶滞后系统的传递函数来进行运算。例如,马达施加电压上限VMlimit能够使用一阶滞后传递函数通过以下的数学式1来表示。
<数学式1>
VMlimit(n)=VMlimit(n-1)+2πFT(VDC-VMlimit(n-1))
在数学式1中,F表示截止频率,T表示采样周期。另外,VMlimit(n-1)表示马达施加电压上限的上次值,VMlimit(n)表示马达施加电压上限的此次值。
而且,在本实施方式中,数学式1的截止频率F如以下的数学式2所示的那样作为二次时间变量而被运算。
<数学式2>
F=F0+F0C2
在数学式2中,F0表示截止频率初始值,C表示截止频率计数器。当检测到降低的电源电压VDC转为上升时,截止频率计数器C根据该检测而开始进行计数动作。通过对截止频率计数器C的计数值进行二次方运算并与截止频率初始值F0相乘,使得通过数学式2计算的截止频率F的值如图3所示那样随着时间的经过而急剧地增加。
这样,通过使用以截止频率F为二次时间变量的一阶滞后传递函数运算马达施加电压上限VMlimit,马达施加电压上限VMlimit将一阶滞后传递函数所引起的变化和截止频率的变化合成,从而如图3所示那样按照S形曲线平滑地变化。即,马达施加电压上限VMlimit以如下方式平滑地变化:初期的上升速度缓慢,但随着时间的经过,其上升速度逐渐变高,然后,上升速度逐渐降低。通过使初期的上升速度缓慢,例如,如图4所示,即使在降低的电源电压VDC恢复到原始的电压值时反复进行降低、上升,马达施加电压上限VMlimit的变动也被抑制得较小。因此,通过对三相马达的各相的线圈施加与该马达施加电压上限VMlimit相当的电压,即使在电源电压VDC反复变动的情况下,也能够将马达转速ω的变动抑制得较小。
此外,在以上描述中,说明了使用以截止频率F为二次时间变量的一阶滞后传递函数来运算马达施加电压上限VMlimit的例子。但是,马达施加电压上限VMlimit也可以使用其它的函数进行运算。例如,为了运算马达施加电压上限VMlimit,也可以使用以截止频率F为三次时间变量的一阶滞后传递函数。而且,也可以使用指数函数或Sigmoid函数来运算呈S形状地变化的马达施加电压上限VMlimit。无论在何种情况下,通过使用期望的函数来运算马达施加电压上限VMlimit,VMlimit运算部16都能够运算出呈S形状地平滑变化的马达施加电压上限VMlimit。
在从检测到降低的电源电压VDC转为上升的时点t3到所运算的马达施加电压上限VMlimit近似于电源电压VDC(或实际的马达转速ω近似于目标马达转速ω*)的时点t4的期间,VMlimit运算部16将所运算的马达施加电压上限VMlimit赋予给Duty运算部18。对于其以外的期间,VMlimit运算部16对Duty运算部18赋予由PI运算部14运算的马达施加电压。或者,VMlimit运算部16也可以是:如果由PI运算部14运算的马达施加电压比马达施加电压上限VMlimit大,则对Duty运算部18赋予马达施加电压上限VMlimit,如果由PI运算部14运算的马达施加电压为马达施加电压上限VMlimit以下,则对Duty运算部18赋予由PI运算部14运算的马达施加电压。
Duty运算部18基于由VMlimit运算部16赋予的马达施加电压或马达施加电压上限VMlimit和电源电压VDC,运算PWM占空比。例如,Duty运算部18能够运算对应于马达施加电压或马达施加电压上限VMlimit的大小与电源电压VDC的大小之比的PWM占空比。因此,例如,在VMlimit运算部16对Duty运算部18赋予马达施加电压上限VMlimit的情况下,Duty运算部18运算用于对三相马达30的各相的线圈施加与马达施加电压上限VMlimit相当的施加电压的PWM占空比。由Duty运算部18运算的PWM占空比被赋予给PWM驱动信号生成部20。
PWM驱动信号生成部20生成具有与由Duty运算部18运算的PWM占空比对应的脉宽的PWM驱动信号,并输出至逆变器22。逆变器22将来自未图示的作为直流电源的车载蓄电池的直流电力转换成交流电力并供给至三相马达30。逆变器22具备在车载蓄电池的正极和负极之间并联连接的三相的桥臂。各相的桥臂具备串联连接的多个开关元件(例如,IGBT、MOSFET等)。通过按照由PWM驱动信号生成部20生成的PWM驱动信号对设置于逆变器22的各相的桥臂的开关元件进行PWM控制,使从车载蓄电池供给的直流电力转换成交流电力并供给至三相马达30。此时,对三相马达30的各相的线圈施加与由PI运算部14运算的马达施加电压或由VMlimit运算部16运算的马达施加电压上限VMlimit相当的电压。
电流检测部24通过三相马达30中设为通电对象的各相的线圈的切换,来检测基于各相的线圈中产生的感应电压的电流。这样,通过检测基于各相的线圈中产生的感应电压的电流,能够计算三相马达30的实际的转速ω。三相马达30的实际的转速ω的计算可以在电流检测部24中进行,也可以在与电流检测部24不同的结构中基于所检测的电流来计算三相马达30的实际的转速ω。或者,为了检测三相马达30的实际的转速ω,也可以利用检测三相马达30的旋转位置的位置传感器。
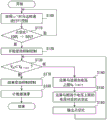
接着,在本实施方式的马达控制装置10中,参照图5的流程图来说明在电源电压VDC暂时降低,然后上升并恢复到通常的电源电压VDC时,抑制三相马达30的转速追随该电源电压VDC的变动而变动的变动抑制控制的处理内容的一个例子。
在最初的步骤S100中,按照目标马达转速ω*,对马达转速进行PI控制。由此,三相马达30的实际的转速ω被控制为追随目标马达转速ω*。通过这种控制,例如,如图2所示,即使在时点t1电源电压VDC开始暂时性的降低,在直到此后的时点t2为止的期间中,实际的马达转速ω也被维持成目标马达转速ω*。
在此,在图2的时点t1到时点t2的期间,不管电源电压VDC降低与否,均将实际的马达转速ω维持成目标马达转速ω*,因此,PWM占空比增加。但是,在时点t2,PWM占空比达到100%,PWM占空比无法进一步增加。因此,在时点t2以后,通过PI控制,不能将实际的马达转速ω维持成目标马达转速ω*,与电源电压VDC的降低相应地,实际的马达转速ω也不得不降低。
在图2的时点t3,当降低的电源电压VDC转为增加时,PWM占空比从100%降低到低于100%的值。图5的流程图的步骤S110在电源电压VDC暂时降低且PWM占空比成为100%后判定出PWM占空比从100%降低到了低于100%的值(例如,98%)。即,在步骤S110中,基于PWM占空比的变化,判定出降低的电源电压VDC转为增加。此外,电源电压VDC是否转为增加也可以从电源电压VDC的变化直接判定。在步骤S110的判定结果为“是”的情况下,进入步骤S120的处理。另一方面,在步骤S110的判定结果为“否”的情况下,返回至步骤S100的处理。
在步骤S120中,开始进行变动抑制控制,该变动抑制控制抑制三相马达30的转速立即追随电源电压VDC的上升而快速上升、其结果三相马达30的转速根据电源电压VDC的变动而变动的现象。具体而言,在该步骤S120中,开始进行上述的截止频率计数器C的计数。
在步骤S130中,判定在变动抑制控制中运算的马达施加电压上限VMlimit是否为恢复到原始的电压值的电源电压VDC以上。在该步骤S130的判定结果为“是”的情况下,不再需要继续执行变动抑制控制,因此,进入步骤S170的处理。另一方面,在步骤S130的判定结果为“否”的情况下,为了继续执行变动抑制控制,进入步骤S140的处理。此外,在步骤S130中,也可以追加性地或者替代性地判定实际的马达转速ω变为目标马达转速ω*以上。
在步骤S140中,利用期望的函数来运算马达施加电压上限VMlimit,该马达施加电压上限VMlimit从降低的电源电压VDC转为上升的时点t3的电压值朝向电源电压VDC恢复后的电压值以如下方式进行变化:初期的上升速度缓慢,但随着时间的经过,该上升速度逐渐变高,然后,上升速度逐渐降低,在时点t4,近似于恢复后的电压值。此外,步骤S140的马达施加电压运算处理在步骤S130中反复执行,直至判定为马达施加电压上限VMlimit为电源电压VDC以上。在这样反复的步骤S140的马达施加电压运算处理中,每当执行时,截止频率计数器C的计数值、电源电压VDC以及马达施加电压上限的上次值发生变化,因此,运算出沿着S形状的曲线进行变化的、分别不同的马达施加电压上限VMlimit。
在步骤S150中,运算用于对三相马达30的各相的线圈施加与马达施加电压上限VMlimit相当的施加电压的PWM占空比。运算出的PWM占空比在步骤S160中被输出至PWM驱动信号生成部20。
在步骤S170中,结束变动抑制控制。在该定时,截止频率计数器C的计数动作停止。然后,在步骤S180中,清除截止频率计数器C的计数值。然后,图5的流程图所示的处理结束。
如上所述,根据本实施方式的马达控制装置10,使用规定的函数,运算从降低的电源电压VDC转为上升的时点t3的电压值朝向电源电压VDC恢复后的电压值平滑地变化的马达施加电压上限VMlimit。然后,对三相马达30的各相的线圈施加与所运算的马达施加电压上限VMlimit相当的施加电压。因此,能够抑制实际的马达转速ω突然变化。
马达施加电压上限VMlimit以使由于电源电压VDC的降低而降低了的实际的马达转速ω随着时间的经过而接近目标马达转速ω*的接近速度逐渐变高的方式生成。换言之,电源电压VDC刚刚转为上升之后的初期的接近速度是缓慢的,因此,即使在电源电压VDC反复进行变动的情况下,不管电源电压VDC的变动如何,都能够将实际的马达转速ω的变动抑制得较小。
另外,在电源电压VDC恢复到通常的电压值并稳定下来的情况下,马达施加电压上限VMlimit以使实际的马达转速ω接近目标马达转速ω*的接近速度随着时间的经过而逐渐变高的方式生成马达施加电压。因此,能够使实际的马达转速ω快速地接近目标马达转速ω*。进一步地,然后以使接近速度逐渐降低的方式生成马达施加电压上限VMlimit,因此,能够使实际的马达转速ω缓慢地近似于目标马达转速ω*。
<第二实施方式>
接着,参照附图对本公开的第二实施方式的马达控制装置进行说明。在上述的第一实施方式的马达控制装置10中,在降低的电源电压VDC上升时,通过对马达施加电压确定上限即马达施加电压上限VMlimit,抑制实际的马达转速ω的变动。
与之相对,第二实施方式的马达控制装置110在降低的电源电压VDC上升时,通过确定过渡目标马达转速ntrgt来抑制实际的马达转速ω的变动,过渡目标马达转速ntrgt从电源电压VDC转为上升的时点的实际的马达转速ω朝向目标马达转速ω*以如下方式变化:随着时间的经过,上升速度逐渐变高,然后,上升速度逐渐降低。以下,以与第一实施方式的马达控制装置10的不同点为中心对第二实施方式的马达控制装置进行说明。
如图6所示,本实施方式的马达控制装置110具有作为过渡目标设定部的过渡目标马达转速(ntrgt)运算部116,以此来代替第一实施方式的马达控制装置10的VMlimit运算部16。
只要不产生电源电压VDC的变动(从暂时性的降低向原始的电源电压VDC的恢复),ntrgt运算部116就如图7中单点划线所示将与目标马达转速ω*相等的转速确定为过渡目标马达转速ntrgt。或者,在图7的时点t2尽管PWM占空比为100%但实际的马达转速ω开始降低的情况下,ntrgt运算部116也可以以追随该实际的马达转速ω的降低的方式设定过渡目标马达转速ntrgt。而且,ntrgt运算部116也可以构成为直至电源电压VDC暂时降低且降低的电源电压VDC转为上升为止,不设定过渡目标马达转速ntrgt。
但是,在电源电压VDC暂时性地降低,然后产生了向原始的电源电压VDC恢复的那种电源电压VDC的变动的情况下,如图7所示,ntrgt运算部116利用期望的函数来运算过渡目标马达转速ntrgt,该过渡目标马达转速ntrgt从降低的电源电压VDC转为上升的时点t3的实际的马达转速ω朝向目标马达转速ω*以如下方式进行变化:初期的上升速度缓慢,但随着时间的经过,该上升速度逐渐变高,然后,上升速度逐渐降低,在时点t4,近似于目标马达转速ω*。
此外,作为为了运算过渡目标马达转速ntrgt而利用的期望的函数,与第一实施方式相同,能够使用将截止频率F作为二次时间变量的一阶滞后传递函数、将截止频率F作为三次时间变量的一阶滞后传递函数、指数函数或Sigmoid函数等。
PI运算部114至少从图7的时点t3到时点t4,运算与实际的马达转速ω和过渡目标马达转速ntrgt的偏差对应的控制量作为马达施加电压。Duty运算部118运算对应于由PI运算部114运算的马达施加电压的大小与电源电压VDC的大小之比的PWM占空比。由此,如图7所示,能够在从时点t3到时点t4的期间,控制对三相马达130的各相的线圈施加的电压,使得不管电源电压VDC向原始的电压值恢复与否,实际的马达转速ω都随着过渡目标马达转速ntrgt呈S形状地变化。其结果,利用本实施方式的马达控制装置110,在电源电压VDC暂时性地降低,然后产生了恢复至原始的电压值的那种电源电压VDC的变动时,也能够起到与第一实施方式中说明的作用效果相同的作用效果。
图8是表示在本实施方式的马达控制装置110中,在电源电压VDC暂时降低,然后上升并恢复到通常的电源电压VDC时,抑制三相马达30的转速追随该电源电压VDC的变动而变动的变动抑制控制的处理内容的一个例子的流程图。
步骤S200~步骤S220及步骤S270~S280与图5的流程图的步骤S100~S120及步骤S170~S180相同,因此省略说明。
在步骤S230中,判定在变动抑制控制中运算的过渡目标马达转速ntrgt是否与由上级的控制装置赋予的目标马达转速ω*一致。在该判定处理中,实际的马达转速ω随着过渡目标马达转速ntrgt而变化,因此,也可以判定实际的马达转速ω是否与目标马达转速ω*一致。在该步骤S230的判定结果为“是”的情况下,不再需要继续执行变动抑制控制,因此,进入步骤S270的处理。另一方面,在步骤S230的判定结果为“否”的情况下,继续执行变动抑制控制,因此,进入步骤S240的处理。
在步骤S240中,利用期望的函数来运算过渡目标马达转速ntrgt,该过渡目标马达转速ntrgt从降低的电源电压VDC转为上升的时点t3的实际的马达转速ω朝向目标马达转速ω*以如下方式进行变化:初期的上升速度缓慢,但随着时间的经过,该上升速度逐渐变高,然后,上升速度逐渐降低,在时点t4,近似于目标马达转速ω*。此外,直到步骤S230的判定结果变为“是”为止都在步骤S240中反复运算过渡目标马达转速ntrgt这一做法与第一实施方式的马达施加电压上限VMlimit的运算相同。
在步骤S250中,运算用于对三相马达130的各相的线圈施加与过渡目标马达转速ntrgt和实际的马达转速ω的偏差对应的马达施加电压的PWM占空比。然后,在步骤S260中,将所运算的PWM占空比输出至PWM驱动信号生成部120。
以上,对本公开的优选的实施方式进行了说明,但本公开丝毫不受上述的各实施方式的限制,可以在不脱离本公开的主旨的范围内进行各种变形来实施。
例如,本说明书所记载的马达控制装置10、110及其方法可由如下的专用计算机实现:该专用计算机通过构成以执行由计算机程序具体化的一个或多个功能的方式编程的处理器及存储器而提供。或者,本说明书所记载的马达控制装置10、110及其方法也可以由如下的专用计算机实现:该专用计算机通过利用一个以上的专用硬件逻辑电路构成处理器而提供。或者,本说明书所记载的马达控制装置10、110及其方法也可以由如下的一个以上的专用计算机实现:该一个以上的专用计算机通过以实现执行计算机程序的一个或多个功能的方式编程的处理器及存储器和由一个以上的硬件逻辑电路构成的处理器的组合而构成。另外,计算机程序也可以作为由计算机执行的指令而存储于计算机可读取的非过渡有形记录介质中。
Claims (7)
1.一种马达控制装置(10、110),在用于驱动马达(30、130)的、从电源供给的电源电压暂时降低,然后上升并恢复到通常的电源电压时,执行抑制所述马达的转速追随该电源电压的变动而变动的变动抑制控制,其特征在于,具备:
检测部(S110、S210),其检测降低的电源电压转为上升;以及
生成部(16、18、20、22、116、118、120、122),其根据由所述检测部检测到电源电压转为上升这一情况,以使根据电源电压的降低而降低了的实际的马达转速(ω)随着时间的经过而接近目标马达转速(ω*)的接近速度逐渐变高,然后接近速度逐渐降低的方式,使用规定的函数生成用于向所述马达施加的施加电压;
通过对所述马达施加所述生成部所生成的施加电压,执行所述变动抑制控制。
2.根据权利要求1所述的马达控制装置,其特征在于,
所述马达被经由逆变器进行PWM控制,
所述生成部(16、18、20、22)具备:
上限设定部(16),其使用所述规定的函数来设定马达施加电压上限(VMlimit),该马达施加电压上限从转为上升的时点的电源电压朝向恢复后的通常的电源电压以随着时间的经过,上升速度逐渐变高,然后,上升速度逐渐降低的方式进行变化;
计算部(18),其不管电源电压上升与否,都计算用于对所述马达施加与所述上限设定部所设定的马达施加电压上限(VMlimit)相当的施加电压的PWM占空比;以及
驱动部(20),其按照由所述计算部算出的PWM占空比驱动逆变器(22)。
3.根据权利要求1所述的马达控制装置,其特征在于,
所述马达被经由逆变器进行PWM控制,
所述生成部(116、118、120、122)具备:
过渡目标设定部(116),其使用所述规定的函数来设定过渡目标马达转速(ntrgt),该过渡目标马达转速从电源电压转为上升的时点的实际的马达转速朝向目标马达转速(ω*)以随着时间的经过,上升速度逐渐变高,然后,上升速度逐渐降低的方式进行变化;
计算部(118),其不管电源电压上升与否,都计算用于使实际的马达转速(ω)追随所述过渡目标设定部所设定的过渡目标马达转速(ntrgt)而变化的PWM占空比;以及
驱动部(120),其按照由所述计算部算出的PWM占空比驱动逆变器(122)。
4.根据权利要求2或3所述的马达控制装置,其特征在于,
尽管PWM占空比为100%,但如果实际的马达转速(ω)与目标马达转速(ω*)相比降低,然后,PWM占空比从100%变化为低于100%,则所述检测部检测出电源电压降低且该降低的电源电压转为上升。
5.根据权利要求2所述的马达控制装置,其特征在于,
在所述上限设定部所设定的马达施加电压上限(VMlimit)变为恢复后的电源电压(VDC)以上时,结束所述变动抑制控制。
6.根据权利要求3所述的马达控制装置,其特征在于,
在所述过渡目标设定部所设定的过渡目标马达转速(ntrgt)与目标马达转速(ω*)一致时,结束所述变动抑制控制。
7.根据权利要求1~6中任一项所述的马达控制装置,其特征在于,
所述规定的函数是包含随着时间的经过而比比例关系更大幅度地增加的截止频率的一阶滞后系统的传递函数。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020131926 | 2020-08-03 | ||
| JP2020-131926 | 2020-08-03 | ||
| PCT/JP2021/026503 WO2022030205A1 (ja) | 2020-08-03 | 2021-07-14 | モータ制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN116057828A true CN116057828A (zh) | 2023-05-02 |
Family
ID=80117990
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202180058459.5A Pending CN116057828A (zh) | 2020-08-03 | 2021-07-14 | 马达控制装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20230114838A1 (zh) |
| JP (1) | JP7327680B2 (zh) |
| CN (1) | CN116057828A (zh) |
| DE (1) | DE112021004131T5 (zh) |
| WO (1) | WO2022030205A1 (zh) |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59148585A (ja) * | 1983-02-08 | 1984-08-25 | Mitsubishi Electric Corp | 電力変換装置の制御回路 |
| JPS6260499A (ja) * | 1985-09-10 | 1987-03-17 | Toshiba Corp | インバ−タ装置 |
| JP5851522B2 (ja) | 2011-12-15 | 2016-02-03 | 東芝キヤリア株式会社 | モータ駆動装置 |
| EP2830209B1 (en) | 2012-03-19 | 2018-09-12 | Kabushiki Kaisha Yaskawa Denki | Motor control device |
| WO2014198374A1 (de) | 2013-06-11 | 2014-12-18 | Brose Fahrzeugteile GmbH & Co. Kommanditgesellschaft, Würzburg | Verfahren und vorrichtung zum betrieb eines elektromotorischen gebläseantriebs |
| JP2020131926A (ja) | 2019-02-20 | 2020-08-31 | 日本精機株式会社 | 車両用表示装置 |
-
2021
- 2021-07-14 JP JP2022541185A patent/JP7327680B2/ja active Active
- 2021-07-14 CN CN202180058459.5A patent/CN116057828A/zh active Pending
- 2021-07-14 WO PCT/JP2021/026503 patent/WO2022030205A1/ja active Application Filing
- 2021-07-14 DE DE112021004131.2T patent/DE112021004131T5/de active Pending
-
2022
- 2022-12-14 US US18/065,706 patent/US20230114838A1/en active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| WO2022030205A1 (ja) | 2022-02-10 |
| DE112021004131T5 (de) | 2023-06-29 |
| JPWO2022030205A1 (zh) | 2022-02-10 |
| US20230114838A1 (en) | 2023-04-13 |
| JP7327680B2 (ja) | 2023-08-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4737087B2 (ja) | 永久磁石式同期モータの制御装置 | |
| US7352598B2 (en) | Inverter units with duty cycle control based on the detected, high and low output voltage | |
| JP2015139285A (ja) | インバータ装置 | |
| US20200382042A1 (en) | Current detection device and electric power steering device | |
| EP2897284A1 (en) | Motor controller and method for controlling motor | |
| JP5550500B2 (ja) | Dcdcコンバータ | |
| JP7346957B2 (ja) | 充電制御装置 | |
| JP6354466B2 (ja) | 車両空調機用モータ制御装置 | |
| CN108429506B (zh) | 变频器控制电机减速的方法和装置 | |
| CN116057828A (zh) | 马达控制装置 | |
| US10992241B2 (en) | Control device of motor and storage medium | |
| US20180358914A1 (en) | Motor control circuit, control method, motor drive system, electronic device | |
| JP6687980B2 (ja) | ファン制御システム | |
| US9667185B2 (en) | Method and device for operating an electromotive fan drive | |
| JP6256277B2 (ja) | モータ制御装置及びモータ制御方法 | |
| CN112567620B (zh) | 逆变装置 | |
| JP2016136820A (ja) | モータ駆動装置 | |
| JP6717048B2 (ja) | 電動機への電圧供給装置、及び、その制御方法 | |
| JP2019097268A (ja) | モータ制御装置およびモータ制御方法 | |
| CN112840555B (zh) | 电机驱动装置、电动车辆系统 | |
| JP4706716B2 (ja) | 誘導電動機の制御方法 | |
| JP3419258B2 (ja) | モータ制御装置 | |
| JP4640563B2 (ja) | 電動パワーステアリング装置 | |
| JP4037536B2 (ja) | モータ制御装置 | |
| JP6943640B2 (ja) | 半導体集積回路、冷却装置、電子機器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |