以下に、図面を参照しながら本開示を実施するための複数の形態を説明する。各形態において先行する形態で説明した事項に対応する部分には同一の参照符号を付して重複する説明を省略する場合がある。各形態において構成の一部のみを説明している場合は、構成の他の部分については先行して説明した他の形態を適用することができる。各実施形態で具体的に組み合わせが可能であることを明示している部分同士の組み合わせばかりではなく、特に組み合わせに支障が生じなければ、明示していなくても実施形態同士を部分的に組み合せることも可能である。
(第1実施形態)
第1実施形態の車両用表示装置100について、図1~図18を参照しながら説明する。第1実施形態の車両用表示装置100は、自動運転機能を有する車両に搭載(適用)されている。以下、車両用表示装置100を表示装置100と呼ぶ。
表示装置100は、図1に示すように、HCU(Human Machine Interface Control Unit)160を備えている。表示装置100は、表示部(後述する複数の表示デバイス)に、例えば、車速、エンジン回転数、トランスミッションのシフト位置、更には、ナビゲーションシステム(ここでは、ロケータ30)によるナビゲーション情報等の車両走行情報を表示する。また、表示装置100は、自動運転機能が発揮されているときに、車両の走行状態に応じて、ドライバへ表示すべき内容(情報)を表示部に表示する。
表示装置100は、車両に搭載されたDSM(Driver Status Monitor)20、ロケータ30、周辺監視センサ40、車載通信器50、第1自動運転ECU60、第2自動運転ECU70、および車両制御ECU80と、通信バス90等を介して接続されている。
DSM20は、近赤外光源および近赤外カメラと、これらを制御する制御ユニットとを含む構成である。DSM20は、運転席のヘッドレスト部分に近赤外カメラを向けた姿勢にて、例えばステアリングコラム部の上面、またはインストルメントパネルの上面等に設置されている。DSM20は、近赤外光源によって近赤外光を照射されたドライバの頭部を、近赤外カメラによって撮影する。近赤外カメラによる撮像画像は、制御ユニットによって画像解析される。制御ユニットは、ドライバのアイポイントの位置および視線方向等の情報を撮像画像から抽出し、抽出したドライバの状態情報(脇見、居眠り、病気発生等)を、通信バス90を通じて、HCU160等に提供する。DSM20は、本開示の視線検知部に対応する。
ロケータ30は、ナビゲーションシステムを形成するものであり、複数の取得情報を組み合わせる複合測位により、自車位置情報等を生成する。ロケータ30は、GNSS(Global Navigation Satellite System)受信機31、慣性センサ32、地図データベース(以下、「地図DB」)33、およびロケータECU34等を備えている。
GNSS受信機31は、複数の測位衛星からの測位信号を受信する。
慣性センサ32は、車両に作用する慣性力を検出するセンサである。慣性センサ32は、例えばジャイロセンサおよび加速度センサを備える。
地図DB33は、不揮発性メモリであって、リンクデータ、ノードデータ、道路形状、構造物等の地図データを格納している。地図データは、道路形状および構造物の特徴点の点群からなる三次元地図であってもよい。尚、3次元地図は、REM(Road Experience Management)によって撮像画像をもとに生成されたものであってもよい。また、地図データには、交通規制情報、道路工事情報、気象情報、および信号情報等が含まれていてもよい。地図DB33に格納された地図データは、後述の車載通信器50にて受信される最新の情報に基づいて、定期的または随時に更新される。
ロケータECU34は、プロセッサ、メモリ、入出力インターフェース、およびこれらを接続するバス等を備えたマイクロコンピュータを主体として含む構成である。ロケータECU34は、GNSS受信機31で受信する測位信号、慣性センサ32の計測結果、および地図DB33の地図データを組み合わせることにより、車両の位置(以下、自車位置)を逐次測位する。
自車位置は、例えば緯度経度の座標で表される構成とすればよい。尚、自車位置の測位には、車両に搭載された車載センサ81(車速センサ等)から逐次出力される信号から求めた走行距離を用いる構成としてもよい。地図データとして、道路形状および構造物の特徴点の点群からなる3次元地図を用いる場合、ロケータECU34は、GNSS受信機31を用いずに、この3次元地図と、周辺監視センサ40での検出結果とを用いて、自車位置、走行速度(走行状態)を特定する構成としてもよい。
周辺監視センサ40は、車両の周辺環境を監視する自律センサである。周辺監視センサ40は、車両の周囲の検出範囲から、歩行者、サイクリスト、人間以外の動物、および他車両12等の移動物体、更に、路上の落下物、ガードレール、縁石、道路標識、走行区画線、中央分離帯等の路面表示、および道路脇の構造物等の静止物体などを検出可能である。周辺監視センサ40は、車両の周囲の物体を検出した検出情報を、通信バス90を通じて、第1自動運転ECU60、第2自動運転ECU70等に提供する。周辺監視センサ40は、物体検出のための検出構成として、例えば、フロントカメラ41、およびミリ波レーダ42を有している。
フロントカメラ41は、車両の前方範囲を撮影した撮像データ、および撮像データの解析結果の少なくとも一方を、検出情報として出力する。
ミリ波レーダ42は、例えば、車両の前後の各バンパーに互いに間隔を開けて複数配置されている。ミリ波レーダ42は、ミリ波または準ミリ波を、車両の前方範囲、前側方範囲、後方範囲および後側方範囲等へ向けて照射する。ミリ波レーダ42は、移動物体および静止物体等で反射された反射波を受信する処理により、検出情報を生成する。尚、地物の特徴点の点群を検出するLiDAR(Light Detection and Ranging/Laser Imaging Detection and Ranging)、超音波の反射波を受信するソナー等の他の検出構成が、周辺監視センサ40に含まれていてもよい。
車載通信器50は、車両に搭載される通信モジュールである。車載通信器50は、LTE(Long Term Evolution)および5G等の通信規格に沿ったV2N(Vehicle to cellular Network)通信の機能を少なくとも有しており、車両の周囲の基地局等との間で電波を送受信する。車載通信器50は、路車間(Vehicle to roadside Infrastructure,以下「V2I」)通信、および車車間(Vehicle to Vehicle,以下「V2V」)通信等の機能を更に有していてもよい。車載通信器50は、V2N通信により、クラウドと車載システムとの連携(Cloud to Car)を可能にする。車載通信器50の搭載により、車両は、インターネットに接続可能なコネクテッドカーとなる。
車載通信器50は、例えば、VICS(Vehicle information and communication System 登録商標)を用いることによって、FM多重放送や道路に設けられたビーコンから、道路上の渋滞状況や交通規制等の道路交通情報を取得する。VICSにおいては、例えば、各種道路(一般道路や高速道路等)ごとに、予め、判定速度が定められており、各種道路における走行車両の車速が判定速度を下回ると、渋滞の発生があると判定される。この判定速度は、例えば、一般道路では、10km/h、高速道路では、40km/h等の値が使用される。車載通信器50は、渋滞の発生状況として、走行先の渋滞区間(開始地点~終了地点)を把握する。
車載通信器50は、VICS等に基づく渋滞情報を第1、第2自動運転ECU60、70、およびHCU160等に提供する。
第1自動運転ECU60、および第2自動運転ECU70は、それぞれメモリ61、71、プロセッサ62、72、入出力インターフェース、およびこれらを接続するバス等を備えたコンピュータを主体として含む構成である。第1自動運転ECU60、および第2自動運転ECU70は、車両の走行を部分的または実質全て制御する自動走行制御を実行可能なECUである。
第1自動運転ECU60は、ドライバの運転操作を部分的に代行する部分的自動運転機能を備えている。第2自動運転ECU70は、ドライバの運転操作を代行可能な自動運転機能を備えている。一例として、米国自動車技術会の規定する自動運転レベルにおいて、第1自動運転ECU60は、手動または周辺監視義務を伴うレベル2以下の部分的な自動走行制御(高度運転支援)を可能にする。
即ち、第1自動運転ECU60は、周辺監視がドライバに必要とされる自動走行制御を実施可能とする。換言すると、第1自動運転ECU60は、後述のセカンドタスクが禁止される自動運転を実施可能にする。
例えば、第1自動運転ECU60は、車両の縦方向制御および横方向制御の一方、または両方を実行可能である。ここで縦方向は、車両の前後方向と一致する方向であり、横方向は、車両の幅方向と一致する方向である。第1自動運転ECU60は、縦方向制御として、車両の加減速の制御を実行し、また、横方向制御として、車両の操舵輪の舵角制御を実行する。
第1自動運転ECU60は、メモリ61に記憶された運転支援プログラムが、複数の命令をプロセッサ62に実行させることで、上記の高度運転支援を実現する複数の機能部を構築する。
第1自動運転ECU60は、周辺監視センサ40から取得する検出情報に基づき、車両の周囲の走行環境を認識する。一例として、第1自動運転ECU60は、車両が現在走行する車線(以下、現在車線)の左右の区画線または道路端の相対位置および形状を示す情報(車線情報)を、解析済みの検出情報として生成する。加えて、第1自動運転ECU60は、現在車線にて車両に先行する先行車の有無と、先行車が有る場合のその位置および速度と、を示す情報(先行車情報)を、解析済みの検出情報として生成する。尚、第1自動運転ECU60は、後述のMDエリア、ADエリア、並びにST区間、非ST区間を認識する構成であってもよい。
第1自動運転ECU60は、先行車情報に基づいて、目標速度での車両の定速走行、または先行車への追従走行を実現するACC(Adaptive Cruise Control)制御を実行する。第1自動運転ECU60は、車線情報に基づいて、車両の車線内走行を維持するLTA(Lane Tracing Assist)制御を実行する。具体的には、第1自動運転ECU60は、加減速または舵角の制御指令を生成し、後述する車両制御ECU80へと逐次提供する。ACC制御が縦方向制御の一例であり、LTA制御が横方向制御の一例である。
第1自動運転ECU60は、ACC制御およびLTA制御の両方を実行することで、レベル2の自動運転を実現する。尚、第1自動運転ECU60は、ACC制御およびLTA制御のいずれか一方を実行することで、レベル1の自動運転を実現可能であってもよい。
一方、第2自動運転ECU70は、上記の自動運転レベルにおいて、レベル3以上の自動走行制御を可能にする。すなわち、第2自動運転ECU70は、周辺監視の中断がドライバに許可される(周辺監視義務が不要な)自動運転を実施可能にする。換言すると、第2自動運転ECU70は、セカンドタスクが許可される自動運転を実施可能にする。
ここでセカンドタスクとは、ドライバに対して許可される運転以外の行為であって、予め規定された特定行為である。第2自動運転ECU70によるレベル3の自動運転機能によって車両が自動走行する自動走行期間にて、この場合のドライバは、限定領域から出るときまたは緊急時において、自動運転システムから運転の制御権を引き継ぐ者(搭乗者)である。自動運転システムによる運転操作の実施要求、即ち、運転交代の要請(Take Over Request)が発生するまで、ドライバには、セカンドタスクの実施が法規的に許可され得る。
セカンドタスクは、セカンダリアクティビティまたはアザーアクティビティ等と呼ばれ得る。セカンドタスクは、自動運転システムからの運転操作の引き継ぎ要求にドライバが対応することを妨げてはならないとされる。セカンドタスクとしては、例えば、動画等のコンテンツの視聴(映画鑑賞、テレビ鑑賞)、スマートフォン等の操作、読書、および食事等の行為が想定される。
第2自動運転ECU70は、メモリ71に記憶された自動運転プログラムが、複数の命令をプロセッサ72に実行させることで、上記の自動運転を実現する複数の機能部を構築する。
第2自動運転ECU70は、ロケータECU34から取得する自車位置および地図データ、周辺監視センサ40から取得する検出情報、車載通信器50から取得する通信情報等に基づき、車両の周囲の走行環境を認識する。例えば、第2自動運転ECU70は、車両の現在車線の位置、現在車線の形状、並びに車両周辺の移動体の相対位置および相対速度、渋滞状況等を認識する。
加えて、第2自動運転ECU70は、車両の走行地域における手動運転エリア(MDエリア)および自動運転エリア(ADエリア)の判別、ADエリアにおけるST区間および非ST区間の判別を行い、その認識結果を後述のHCU160に逐次提供する。
MDエリアは、自動運転が禁止されるエリアである。換言すれば、MDエリアは、車両の縦方向制御、横方向制御および周辺監視の全てをドライバが実行すると規定されたエリアである。例えば、MDエリアは、走行路が一般道路であるエリアとされる。
ADエリアは、自動運転が許可されるエリアである。換言すれば、ADエリアは、縦方向制御、横方向制御および周辺監視のうち1つ以上を、車両が代替可能なエリアである。例えば、ADエリアは、走行路が高速道路または自動車専用道路であるエリアとされる。
ADエリアは、レベル2以下の自動運転が可能な非ST区間と、レベル3以上の自動運転が可能なST区間とに区分される。尚、本実施形態において、レベル1の自動運転が許可される非ST区間と、レベル2の自動運転が許可される非ST区間は、同等であるとする。
ST区間は、例えば、渋滞が発生している走行区間(渋滞区間)であるとされる。また、ST区間は、例えば、高精度地図が整備された走行区間であるとされる。後述のHCU160は、車両の走行速度が判定速度以下となる範囲内である状態が所定期間継続している場合に、ST区間であると判断する。または、HCU160は、自車位置と、VICS等によって車載通信器50から得られる渋滞情報とを用いてST区間であるか否かを判断してもよい。更には、HCU160は、車両の走行速度(渋滞走行区間条件)に加えて、走行道路が2車線以上である、自車両10の周囲(同一レーン、および隣のレーン)に他車両12がいる、走行道路に中央分離帯がある、また、高精度地図データを保有している等の条件をもって、ST区間であるか否かを判断してもよい。
尚、HCU160は、渋滞区間に加えて、車両の周辺環境に関して渋滞以外の特定の条件が成立する区間(高速道路で渋滞を伴わない定速走行、追従走行、LTA(レーンキープ走行))等の可能な区間をST区間としてもよい。
以上の第1、第2自動運転ECU60、70を含んで構成される自動運転システムにより、車両においてレベル2以下、およびレベル3相当(以上)の自動運転が少なくとも実行可能となる。以下において、レベル2相当の自動運転を実行している状態を「レベル2実行モード」、レベル3相当の自動運転を実行している状態を「レベル3実行モード」と表記する場合がある。
車両制御ECU80は、車両の加減速制御、および操舵制御を行う電子制御装置である。車両制御ECU80としては、加減速制御を行うパワーユニット制御ECUおよびブレーキECU、更に、操舵制御を行う操舵ECU等がある。車両制御ECU80は、車両に搭載された車速センサ、舵角センサ等の各センサから出力される検出信号を取得し、電子制御スロットル、ブレーキアクチュエータ、EPS(Electric Power Steering)モータ等の各走行制御デバイスへ制御信号を出力する。車両制御ECU80は、車両の制御指示を第1自動運転ECU60、または第2自動運転ECU70から取得することで、当該制御指示に従う自動走行を実現するように、各走行制御デバイスを制御する。
また、車両制御ECU80は、ドライバによる運転部材の運転操作情報を検出する車載センサ81と接続されている。車載センサ81は、例えば、アクセルペダルの踏込量を検出するペダルセンサ、およびステアリングの操舵量を検出するステアセンサ等を含んでいる。加えて、車載センサ81は、車両の走行速度を検出する車速センサ、走行駆動部(エンジンや走行モータ等)の作動回転数を検出する回転センサ、およびトランスミッションのシフト位置を検出するシフトセンサ等も含んでいる。車両制御ECU80は、検出されたこれら運転操作情報、車両作動情報等を、HCU160へと逐次提供する。
次に、表示装置100の構成について説明する。表示装置100は、表示部としての複数の表示デバイスと、制御部としてのHCU160とを備えている。加えて、表示装置100には、オーディオ装置140、操作デバイス150等が設けられている。
複数の表示デバイスは、ヘッドアップディスプレイ(以下、HUD)110、メータディスプレイ120、およびセンタインフォメーションディスプレイ(以下、CID)130等を含んでいる。複数の表示デバイスには、電子ミラーシステムの各ディスプレイEMB(後方表示)、EML(左方表示)、EMR(右方表示)が更に含まれていてもよい。HUD110、メータディスプレイ120、およびCID130は、静止画または動画等の画像コンテンツを、視覚情報としてドライバに提示する表示部である。
本実施形態では、HUD110、およびメータディスプレイ120をメイン表示部(表示部)とし、CID130をサブ表示部として説明する。
HUD110は、HCU160から取得する制御信号および映像データに基づき、ドライバ前方に結像される画像の光を、車両のフロントウィンドシールド等に規定された投影領域に投影する。フロントウィンドシールドにて車室内側に反射された画像の光は、運転席に着座するドライバによって知覚される。こうしてHUD110は、投影領域よりも前方の空間中に虚像を表示させる。ドライバは、HUD110によって表示される画角内の虚像を、車両の前景と重ねて視認する。
メータディスプレイ120、およびCID130は、例えば、液晶ディスプレイまたはOLED(Organic Light Emitting Diode)ディスプレイ等を主体とする構成である。メータディスプレイ120、およびCID130は、HCU160から取得する制御信号および映像データに基づき、種々の画像を表示画面に表示させる。メータディスプレイ120は、例えば、運転席の正面に設置されたメイン表示部である。CID130は、ドライバの前方において車幅方向の中央領域に設けられたサブ表示部である。例えば、CID130は、インストルメントパネルにおけるセンタクラスタの上方に設置されている。CID130は、タッチパネルの機能を有しており、例えばドライバ等による表示画面へのタッチ操作、およびスワイプ操作等を検出する。
オーディオ装置140は、車室内に設置された複数のスピーカを有している。オーディオ装置140は、HCU160から取得する制御信号および音声データに基づき、報知音または音声メッセージ等を、聴覚情報としてドライバに提示する。すなわち、オーディオ装置140は、視覚情報と異なる態様の情報を提示可能な情報提示デバイスである。
操作デバイス150は、ドライバ等によるユーザ操作を受け付ける入力部である。操作デバイス150には、例えば自動運転機能の各レベルの開始および停止に関連するユーザ操作等が入力される。操作デバイス150には、例えば、ステアリングホイールのスポーク部に設けられたステアスイッチ、ステアリングコラム部に設けられた操作レバー、ドライバの発話内容を認識する音声入力装置、およびCID130におけるタッチ操作用のアイコン(スイッチ)等が含まれる。
HCU160は、上記の車載通信器50、第1自動運転ECU60、第2自動運転ECU70、および車両制御ECU80等からの情報に基づき、自動運転許可エリア(ADエリア)の判断、および自動運転実行中の走行状態に応じたドライバに対する情報提示を行う(詳細後述)。HCU160は、メモリ161、プロセッサ162、入出力インターフェース、およびこれらを接続するバス等を備えたコンピュータを主体として含む構成である。
メモリ161は、コンピュータにより読み取り可能なプログラムおよびデータ等を非一時的に格納または記憶する、例えば半導体メモリ、磁気媒体および光学媒体等のうち、少なくとも一種類の非遷移的実体的記憶媒体(non-transitory tangible storage medium)である。メモリ161は、後述の提示制御プログラム等、プロセッサ162によって実行される種々のプログラムを格納している。
プロセッサ162は、演算処理のためのハードウエアである。プロセッサ162は、例えば、CPU(Central Processing Unit)、GPU(Graphics Processing Unit)、およびRISC(Reduced Instruction Set Computer)-CPU等のうち、少なくとも一種類をコアとして含む。
プロセッサ162は、メモリ161に格納された提示制御プログラムに含まれる複数の命令を、実行する。これによりHCU160は、ドライバへの提示制御ための機能部を、複数構築する。このようにHCU160では、メモリ161に格納された提示制御プログラムが複数の命令をプロセッサ162に実行させることで、複数の機能部が構築される。
HCU160は、第1自動運転ECU60、または第2自動運転ECU70から、走行環境の認識結果を取得する。HCU160は、取得した認識結果に基づいて、車両の周辺状態を把握する。具体的には、HCU160は、ADエリアへの接近、ADエリアへの進入、ST区間(渋滞区間)への接近およびST区間への進入等を把握する。HCU160は、第1、第2自動運転ECU60、70から取得した認識結果に代えて、ロケータECU34や周辺監視センサ40等から直接取得した情報に基づいて周辺状態を把握してもよい。
HCU160は、DSM20、および車両制御ECU80等からの情報に基づいて、ドライバ状態を推定する。例えば、HCU160は、ドライバの各身体部位の運転動作への関与有無を、ドライバ状態として推定する。具体的には、HCU160は、DSM20から取得したドライバの視線方向に関する状態情報等に基づいて、ドライバの眼部が周辺監視を行っているか否かを判定する。また、HCU160は、車両制御ECU80から取得した操舵量に基づいて、ドライバがステアリングを手で把持しているか否かを判定する。また、HCU160は、車両制御ECU80から取得したアクセルペダルの踏込量に基づいて、ドライバがアクセルペダルに足を置いているか否かを判定する。
更に、HCU160は、DSM20から取得したドライバの状態情報から、脇見、居眠り、病気の発生有無等を判定する。
尚、以下において、眼部が周辺監視を行っている状態をアイズオン、行っていない状態をアイズオフと表記する場合がある。また、ステアリングを手で把持している状態をハンズオン、把持していない状態をハンズオフと表記する場合がある。加えて、アクセルペダルに足を置いている状態をレッグオン、置いていない状態をレッグオフと表記する場合がある。
HCU160は、第1自動運転ECU60、および第2自動運転ECU70との共同により、自動運転に関する運転状態を判断する。具体的には、HCU160は、ドライバに対して許可する自動運転レベルと、実際に実行する自動運転レベルとを、運転状態として判断する。
HCU160は、車両がMDエリアを走行している場合に、自動運転を許可できないと判断する。一方で、HCU160は、ADエリアを走行している場合に、レベル2以上の自動運転を許可できると判断する。更に、HCU160は、ADエリアのうち非ST区間を走行している場合に、レベル2以下の自動運転を許可できると判定し、ST区間を走行している場合には、レベル3以上の自動運転を許可できると判定する。
以下において、レベル2の自動運転を許可した状態を、「レベル2許可状態」、レベル3の自動運転を許可した状態を、「レベル3許可状態」と表記する場合がある。また、自動運転自体が禁止された状態を、「自動運転禁止状態」と表記する場合がある。
加えて、HCU160は、レベル2の自動運転を許可すると判断した場合には、レベル2においてハンズオフを許可するか否かを判定する。具体的には、HCU160は、LTAの実行状態、車両周辺の高精度地図データの有無、車線状態、ドライバの周辺監視状態、車両周辺の道路形状等に基づき、特定の条件が成立した場合に、ハンズオフ許可の判定を下す。
特定の条件には、例えば、LTA制御が実行であること、車両周辺の高精度地図データが有ること、現在車線の左右の区画線のうち少なくとも一方を検出可能であること、ドライバが周辺監視を行っていると判断可能であること、走行区間が道路構造の複雑な区間(例えば合流区間や分岐区間等)でないことのうち少なくとも1つが含まれる。以下において、ハンズオフを許可した状態を「ハンズオフ許可状態」、ハンズオフを禁止した状態を「ハンズオフ禁止状態」と表記する場合がある。
また、HCU160は、レベル2以下の自動運転において少なくともACCが実行されている場合、レッグオフを許可する。以下において、レッグオフを許可した状態を「レッグオフ許可状態」、レッグオフを禁止した状態を「レッグオフ禁止状態」と表記する場合がある。加えて、HCU160は、レベル3の自動運転が許可されている場合、アイズオフを許可する。すなわち、レベル3許可状態は、アイズオフ許可状態であるということもできる。
HCU160は、車両の位置、走行速度、周辺状態、ドライバの状態、および現在許可されている自動運転レベル、および操作デバイス150への入力情報等に基づいて、実際に実行する自動運転レベルを判断する。即ち、HCU160は、現在許可されている自動運転レベルの開始指示が入力情報として取得された場合に、当該自動運転レベルの実行を決定する。
HCU160は、自動運転に関するコンテンツの提示を制御する。具体的には、HCU160は、各種情報に基づき各表示デバイス110、120、130に提示させるコンテンツを選定する。
HCU160は、各表示デバイス110、120、130に表示させるコンテンツの調停を行う。HCU160は、各種情報に基づき、各コンテンツの優先度を総合的に判断する。HCU160は、優先度が高いと判断したコンテンツを、提示対象のコンテンツとして選定する。加えて、HCU160は、各表示デバイス110、120、130に表示させる各コンテンツの表示サイズおよび表示レイアウトを、優先度に応じて逐次変更可能である。一例として、HCU160は、優先度の高いコンテンツほど、表示サイズを大きくする。別の一例として、HCU160は、優先度の高いコンテンツほど、各表示領域の手前側に位置させる。
HCU160は、各表示デバイス110、120、130に提供する制御信号および映像データと、オーディオ装置140に提供する制御信号および音声データとを生成する。HCU160は、生成した制御信号および各データを各提示デバイスへと出力することで、各表示デバイス110、120、130にて情報提示を実施する。
表示装置100の構成は、以上のようになっており、以下、図2~図18を加えて、作動および作用効果について説明する。
本実施形態では、主に、高速道路走行において、自動運転レベル2以下に対して、渋滞発生区間での自動運転レベル3(渋滞追従運転)、および本来の高速走行での自動運転レベル3(高速追従運転)等が実施される場合を例にしている。そして、HCU160によって、自動運転時の車両の走行状態に応じて、ドライバに表示すべき表示の内容が、切替え制御されるようになっている。
まず、図2、図3のフローチャートにおいて、ステップS100で、HCU160は、高速道路走行中において、渋滞発生区間(以下、渋滞区間)における自動運転レベル3による運転の交代が可能になったか否かを判定する。渋滞区間での自動運転が可能となる判定条件は、例えば、車速が10km/h以下となる場合である。ステップS100で、HCU160は、否定判定している間は、ステップS100を繰り返す。自動運転が許容されない間は、ドライバによる自動運転レベル2が実施されて、ドライバには周辺監視義務が伴う。
このとき(自動運転レベル2)の、各表示デバイス110、120、130における表示形態は、図4に示すようになっている。例えば、HUD110においては、投影領域の左側に車速値(例えば、60km/h)が表示され、投影領域の右側に自車レーンにおける自車両10と先行車両11、および他車レーン(隣のレーン)における他車両12の画像が表示される。また、メータディスプレイ120には、表示領域の上側中央に車速値が表示され、車速値の下側にHUD110と同様に自車両10および周りの他車両12の画像が表示される。また、CID130には、車速値、ナビゲーション情報としてロケータ30(ナビゲーションシステム)による地図上(走行中の高速道路上)における自車両10、および現在走行中の県名、市名等が表示される。
ステップS100で、肯定判定されると、即ち、渋滞区間における車速が、自動運転可能速度(10km/h)以下となったと判定されると、HCU160は、ステップS110で、図5に示すように、HUD110、およびメータディスプレイ120における表示形態を変更する。即ち、HUD110に、「運転交代可能」の表示を行い、メータディスプレイ120に、「運転交代可能であり、運転交代するか?」の表示を行う。このとき、併せて、メータディスプレイ120には、自動運転可能予測距離(例えば、この先、自動運転可能な距離は2km、所要時間は20分等)の表示が行われる。
次に、ステップS120で、HCU160は、ドライバの運転交代の意思があるかを判定する。ドライバが、操作デバイス150(ステアスイッチ、操作レバー)への操作によって、自動運転への交代(自動運転の選択)を入力すると、HCU160は、運転交代の意思ありと判定する。HCU160は、ステップS120で肯定判定するとステップS130に移行し、否定判定するとステップS310に移行する。
ステップS130では、HCU160は、ドライバから車両(第2自動運転ECU70、車両制御ECU80)へ運転交代を行う。このとき、HCU160は、図6に示すように、HUD110に、「運転交代中」の表示を行い、また、メータディスプレイ120に、「車速値(10km/h)」の表示に併せて、「ハンドルから手を離してください」の表示を行う。
また、HCU160は、図7に示すように、メータディスプレイ120に、運転交代に伴い、「周辺監視不要です」と表示する。
そして、ステップS140で、HCU160は、図8に示すように、HUD110、およびメータディスプレイ120に「運転交代完了」を表示し、メータディスプレイ120に、併せて、「自動運転可能期間(自動運転可能予定距離2km(20分))」を表示する。
次に、ステップS150で、HCU160は、自動運転可能期間(周辺監視義務がなくなった期間)が予め定めた閾値(所定期間)以上か否かを判定する。閾値は、例えば、20分として設定されている。更に詳しくは、自動運転可能期間が20分以上(例えば20~30分程度)であると、HCU160は、自動運転期間は長いと判定し、また、自動運転可能期間が20分未満(例えば5~10分程度)であると、HCU160は、自動運転期間は短いと判定する。
HCU160は、ステップS150で、自動運転可能期間は、閾値以上(長い)であると判定すると、ステップS160に移行し、また、閾値未満(短い)であると判定すると、ステップS230へ移行する。ステップS230へ移行するときは、以下のステップS160~ステップS220(以下で説明する図9~図12)が省略(スキップ)されることになる。
尚、自動運転可能期間が閾値未満である場合は、上記の図5、図7、図8における表示のうち、「自動運転可能予測距離2km/h(20分)」の部分は、例えば、「自動運転可能予測距離1km/h(10分)」等の表示となる。
ステップS160では、HCU160は、図9に示すようにメータディスプレイ120に、リラックス推奨のための表示(セカンドタスク情報の表示)を行う。リラックス推奨表示は、自動運転中において、周辺監視が不要となり、また、ハンズオフ、レッグオフとなったドライバに対して、対応可能なセカンドタスクの例を表示する。セカンドタスクの例として、「こんなことができます」、として、「映画鑑賞」、「スマートフォンの操作」、「読書」等がある。
更に、ステップS170で、HCU160は、図9に示すように、HUD110の表示をオフにする。これは、自動運転中においては、ドライバにとって、多くの表示(情報)は必要とされないためである。
次に、ステップS180で、HCU160は、図10に示すように、メータディスプレイ120に、サービスエリアにかかる情報を表示する。HCU160は、ロケータ30における高精度地図DB33より、走行先にある、いくつかのサービスエリアの名称と、所要距離、所要時間を表示する。
次に、ステップS190で、HCU160は、CID130に、ナビゲーション情報に代えて、セカンドタスク表示(他の情報に切替え)されているか否かを判定する。CID130におけるセカンドタスクの表示は、例えば、テレビ放映、映画(DVD再生)等である。HCU160は、ステップS190で、肯定判定するとステップS200に移行し、否定判定するとステップS210に移行する。
ステップS200では、HCU160は、図11に示すように、メータディスプレイ120に、自車両10、他車両12の画像に代えて、今までCID130に表示されていたナビゲーション情報(地図情報)を表示する。
次に、ステップS210で、HCU160は、DSM20によって検出されるドライバの視線が、各表示デバイス(メータディスプレイ120)以外に向いているか否かを判定する。HCU160は、ステップS210で、肯定判定するとステップS220に移行し、否定判定するとステップS230に移行する。
ステップS220では、HCU160は、図12に示すように、メータディスプレイ120における車速値以外の項目の表示をオフにする、あるいは、表示輝度を今までよりも相対的に低くする。自動運転中においては、ドライバが表示部(メータディスプレイ120)に目を向けていないのであれば、ことさら通常の表示は必要がないことから、HCU160は、このように、表示オフや、輝度低下を行う。
次に、ステップS230で、HCU160は、車速が第1閾値以上、且つ第2閾値未満か否かを判定する。第1閾値は、例えば40km/hであり、第2閾値は、例えば50km/hである。第1閾値以上、第2閾値未満となる走行状態は、渋滞走行を抜け出して、中速域で追従走行している状態である。HCU160は、ステップS230で否定判定をするとステップS230を繰り返し、肯定判定するとステップS240に移行する。
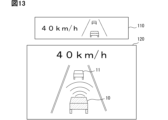
ステップS240では、HCU160は、図13に示すように、メータディスプレイ120に、車速値、自車両10が走行している自車レーンにかかる情報(例えば自車レーンの車線、自車両10、先行車両11等)、および自車両10の制御情報を表示する。自車両10の制御情報は、例えば、前車に追従していること(ACC)を示す画像、あるいは、車線部分を強調することで、車線内走行を維持していること(LTA)を示す画像となっている。
次に、ステップS250で、HCU160は、図13に示すように、HUD110の表示をオンにする。HUD110での表示内容は、メータディスプレイ120における車速値と、自車両10が走行している自車レーンの画像である。
次に、ステップS260で、HCU160は、車速が第2閾値以上か否かを判定する。HCU160は、ステップS260で否定判定をするとステップS260を繰り返し、肯定判定するとステップS270に移行する。ステップS260で、肯定判定した場合は、車両は、40km/h(第1閾値)よりも速い速度(第2閾値=50km/以上)で、追従走行している状態となる。
ステップS270では、HCU160は、図14に示すように、メータディスプレイ120に、車速値、および自車レーンにかかる情報(自車レーンの車線、自車両10、先行車両11等)に加えて、他車レーンにかかる情報(他車レーンの車線、他車両12等)を表示(追加表示)する。
次に、ステップS280で、HCU160は、運転交代の要求があるか否かを判定する。運転交代の要求は、第1、第2自動運転ECU60、70から、自動運転可能な条件が外れて、車両制御ECU80による自動運転から、ドライバによる手動運転(レベル2以下)に切替えるための要求である。HCU160は、ステップS280で、肯定判定するとステップS290に移行し、否定判定するとステップS280を繰り返す。
ステップS290では、HCU160は、図15、図16に示すように、運転交代要求の表示(周辺監視要求の表示)を行う。例えば、HCU160は、HUD110に、「運転交代要求」と表示する。更に、手動運転への切替えにあたって、ハンズオンが必要である場合は、HCU160は、メータディスプレイ120に、例えば、「前を向いて、ハンドルを握ってください」と表示する。また、手動運転への切替えにあたって、ハンズオンが不要でも、前を向く必要がある場合は、HCU160は、メータディスプレイ120に、「姿勢を正して前を向いてください」と表示する。
次に、ステップS300で、HCU160は、運転交代が完了したか否かを判定する。ステップS300で、運転交代が完了したと判定すると、HCU160は、ステップS310で、自動運転をドライバによる運転に切替える。このとき、HCU160は、図17に示すように、メータディスプレイ120に、上記した図4に準じた表示を行う。
また、ステップS300で運転交代が完了していない場合(例えば、ドライバが居眠りをしていたり、急病となっていたりすると)、HCU160は、路肩等への退避走行へ移行して、安全に車両を停車させる。このとき、HCU160は、図18に示すように、HUD110に、「退避走行中」の表示を行い、また、メータディスプレイ120に、「運転交代できなかったため、退避走行に移ります」と表示する。
以上のように、本実施形態では、HCU160は、車両の自動運転機能が発揮されて、ドライバの周辺監視義務がなくなった場合に、表示部(各表示デバイス110、120、130)におけるドライバへ表示すべき内容を、車両の走行状態に応じて切替えるようにしている。これにより、ドライバに対して有用な情報をタイムリーに提示することができる。
また、HCU160は、周辺監視義務がなくなった期間が、予め定めた所定期間に対して短い場合と、長い場合とで、表示部における表示内容を切替えるようにしている。これにより、周辺監視義務がなくなった期間に応じて、ドライバへの有用な表示が可能となる。
また、HCU160は、周辺監視義務がなくなった期間が、所定期間に対して長い場合に、ドライバに許可されるセカンドタスク情報を表示部に表示する。これにより、ドライバは、周辺監視義務がなくなった期間において、セカンドタスク情報を見て、楽しむことができる。
また、HCU160は、サブ表示部(CID130)におけるナビゲーション情報を、他の情報(テレビや映画等)に切替えると、メイン表示部(HUD110、メータディスプレイ120)に、ナビゲーション情報を表示する。これにより、ドライバは、走行情報として必要とされるナビゲーション情報を得ながら、他の情報も見ることができる。
また、視線検知部(DSM20)によって検知されるドライバの視線が、表示部以外に向いている場合に、HCU160は、表示部における表示形態として、走行情報として車速以外の項目を消去する、あるいは、表示輝度を低下させる。これにより、自動運転中においては、ドライバが表示部に目を向けていないのであれば、ことさら通常の表示は必要がないことから、表示オフや、輝度低下を行うことで、消費電力を低減することができる。
また、HCU160は、車両の速度が、予め定めた第1閾値以上、且つ第2閾値未満の場合に、自車両10の走行している自車レーンにかかる情報を表示部に表示すると共に、車両の速度が、第2閾値以上の場合に、自車レーン以外の他車レーンにかかる情報を追加して表示部に表示する。これにより、車速に応じて、表示情報を増加させて、ドライバの注意喚起を図ることができる。
(第1実施形態の変形例)
上記第1実施形態(フローチャートのステップS220)では、自動運転中において、ドライバの視線がメータディスプレイ120を向いていない場合に、メータディスプレイ120の輝度を今までよりも相対的に低くすることを説明した。
しかしながら、図19、図20に示すように、輝度を低下させるにあたっては、車速に応じて変化させるようにしてもよい。車速が高い場合に対して、相対的に車速が低くなるほど、輝度を低くする。これにより、車速が低い場合は、表示に対する注意の度合いは低くてもよいが、車速が高くなるほど表示に対する注意の度合いを高めることができる。
また、図21に示すように、自動運転レベル3において、ドライバによるオーバーライド(ハンドルを握る、アクセルを踏む等)があると、表示部(メータディスプレイ120)における表示形態を自動運転レベル2での表示(図4で説明した表示)に変更するようにしてもよい。また、自車両10が自動で車線変更する場合や、隣レーンから自車両10の前方に割込む意思のある車両が検出された場合も、表示部(メータディスプレイ120)における表示形態を自動運転レベル2での表示(図4で説明した表示)に変更するようにしてもよい。これは、自車または他車が車線を跨いで移動する場合、搭乗者はシステムが周囲を認識して走行しているのか不安を感じる可能性があり、システムが周囲を認識して走行していることを表示した方が、搭乗者が安心できるためである。
また、上記第1実施形態では、表示部は、HUD110、メータディスプレイ120、およびCID130を有するものとして説明した。しかしながら、図22に示すように、CID130が、例えば複数のCID131、132、133から形成されて、メータディスプレイ120、およびCID131~133が、インストルメントパネル上で横一列に配置されるピラートゥーピラータイプの表示部としてもよい。
例えば、CID131は、表示面にタッチパネルが設けられて、各情報を表示すると共に、例えば、ドライバのタッチ操作によって、運転交代等のYes、Noを入力可能とする(操作デバイス150の役割を果たす)表示部である。また、CID132は、ナビゲーション情報を表示する表示部である。また、CID133は、TVや映画等の動画を表示(再生)する表示部である。
また、上記第1実施形態では、渋滞時での自動運転レベル3中の表示切替え制御について説明したが、渋滞時以外にも、限定されたエリアで高速走行での自動運転レベル3(エリア限定レベル3)に適用してもよい。エリア限定レベル3で適用する場合は、車速によって第1閾値、第2閾値を設定するのではなく、自動運転レベル3が終了する地点までの距離又は時間で第1閾値、第2閾値を設定すればよい。例えば、自動運転レベル3が終了する地点までの距離が5kmとなった地点を第1閾値とし、自動運転レベル3が終了する地点までの距離が2kmとなった地点を第2閾値とすればよい。例えば、自動運転レベル3が終了する地点までの時間が5分となった地点を第1閾値とし、自動運転レベル3が終了する地点までの時間が2分となった地点を第2閾値とすればよい。
また、上記第1実施形態では、表示内容の切替え制御を行う際に、第1閾値、および第2閾値を用いたが、これに限らず、1つの閾値としてもよい。また、図2、図3のフローチャートにおいて、各ステップは、一部が省略されたものとしてもよい。
(第2実施形態)
第2実施形態を図23~図26に示す。第2実施形態では、HCU160(制御部)は、ロケータ30、周辺監視センサ40、車載通信器50、第1、第2自動運転ECU60、70、および車両制御ECU80等から各種情報を取得する。HCU160は、自動運転レベル2以下(第1自動運転状態)と、自動運転レベル3以上(第2自動運転状態)との間における移行パターンに応じて、あるいは自動運転レベル3以上における走行状態に応じて、例えば、メータディスプレイ120(表示部)におけるドライバに表示すべき内容を切替える。
図23に示すように、例えば、高速道路での渋滞走行時の自動運転に関しては、自動運転を制御するための車速V0、V1、V2が予め設定されている。車速V0は、例えば10km/hであり、車速V1は、例えば40km/hであり、車速V2は、例えば60km/hである。車速V1は、本開示の所定車速値に対応し、車速V2は、本開示の判定車速値に対応する。
走行中に車速V0以下となると、渋滞走行時の自動運転レベル3の適用が開始される。このときは、ドライバには、周辺監視義務が伴わないことから、HCU160は、図24(a)に示すように、メータディスプレイ120に、セカンドタスクが可能となるメッセージを表示する。その後、ドライバは、セカンドタスクの実行が可能となる(映画鑑賞、スマートフォンの操作、読書等)。
一方、車速がV2を超えると、渋滞走行時の自動運転レベル3が解除されて、自動運転レベル2に移行される。自動運転レベル2は、例えば、先行車両11に対する追従走行(ACC)や、車線内維持走行(LTA)等の走行である。
ここで、本実施形態では、HCU160は、渋滞走行時の自動運転レベル3から、渋滞が解消された後の自動運転レベル2に移行する際に、車速V2よりも小さい側に設定される車速V1(所定車速値)になった段階で、予告表示として、自動運転レベル2に対応する表示内容に切替える。つまり、実質的には、自動運転レベル3が実行されているものの、メータディスプレイ120には、先行して、自動運転レベル2に対応する表示が行われる。
自動運転レベル2に対応する表示内容は、例えば、図24(b)に示すように、自車両10、および先行車両11、他車両12等を示す周辺情報である。更に、この周辺情報には、「この先、自動運転レベル2に移行します。ハンドルを握ってください」と言ったメッセージMが添えられる。メッセージMの内容は、ドライバに対する各種提案や通知である。そして、車速V2以上となると、ドライバへの運転交代が実施される。
これにより、渋滞走行時において、自動運転レベル3から自動運転レベル2に移行される前段階で、自動運転レベル2に対応する表示内容に切替えられるので、ドライバは、自動運転レベル2への移行を事前に認識することができ、慌てずに、自動運転レベル2への移行が可能となる。
尚、図25、図26に示すように、渋滞走行時における自動運転レベル3から自動運転レベル2への移行については、種々のパターンが考えられる。特に、図25(b)では、短時間のうち、自動運転レベル3用の表示と、自動運転レベル2用の表示とが繰り返されることになり、ドライバには煩わしいものとなってしまう。
そこで、HCU160は、例えば、車載通信器50から得られるVICS情報から、渋滞走行がまだ続くと分かっているときは、一旦表示した自動運転レベル2用の表示を消さずに継続させるようにするとよい。これにより、ドライバに対しては安全サイドの表示となる。
また、HCU160は、周辺監視センサ40や車両制御ECU80等から得られる情報を用いて、自車両10の加速ができる条件(先行車両11との距離が広がっている、先行車両11がいない状態等)か否かを判定し、渋滞が続くと分かるときは、一旦表示した自動運転レベル2用の表示を消さずに継続させるようにしてもよい。
更に、HCU160は、自動運転レベル3用の表示については、車速V1以下となる条件が予め定めた所定時間以上、続く場合に実施するようにするとよい。あるいは、HCU160は、一度、車速V1を超えたら、車速V1の値を下げて(閾値変更)、自動運転レベル3用の表示に戻りにくくしててもよい。
(第2実施形態の変形例)
第2実施形態の変形例を図27に示す。第2実施形態の変形例では、HCU160は、自車両10が走行する道路の走行車線が多いほど、車速V1(所定車速値)をより小さい側に設定する。
走行車線が多いほど、交通量が多くなることが考えられるため、車速V1をより小さい値に設定することで、自動運転レベル2に対応する表示(周辺情報)への切替えタイミングを早くすることができる。よって、走行車線が多いほど、早めに自動運転レベル2用の表示に切替えることで、周囲の状況を確認可能な、より安全な表示とすることができる。
(第3実施形態)
第3実施形態を図28、図29に示す。第3実施形態では、HCU160は、自動運転レベル2以下から自動運転レベル3へ移行する際のレベルの上がり方がより大きいほど、レベル移行用の提案内容をより強調して表示する。
自動運転レベル2以下は、例えば、レベル0(完全な手動運転)、レベル1、レベル2がある。また、レベル2においては、ドライバがハンドルを手で把持しているハンズオンと、ハンドルを手で把持していないハンズオフとがある。
図28は、自動運転レベル0(通常走行)から、レベル3(渋滞走行)へ移行される場合(上段)、および自動運転レベル1(追従走行)から、レベル3(渋滞走行)へ移行される場合(下段)の、メータディスプレイ120における表示内容を示している。
自動運転レベルの変更前の段階において、HCU160は、上段では本来のメータディスプレイ120の表示(速度計、回転計)を行い、また、下段では、レベル1での追従走行にかかる表示を行う。
そして、上記のように、自動運転レベルが移行される間において、HCU160は、レベル移行用のメッセージM(提案、あるいは通知等)を追加表示する。このとき、HCU160は、レベルの上がり方が大きいほど(上段)、レベルのあがり方が小さい場合(下段)よりも強調表示となるようにする。ここでは、メッセージMをより大きく表示する。メッセージMは、例えば、「自動運転に移行可能です。運転交代しますか。ハンドルを離してください」といった、内容とすることができる。そして、HCU160は、自動運転レベル3へ移行された後は、自動運転レベル3に対応した表示を行う(セカンドタスクの提案)。
図29は、自動運転レベル2(ハンズオン)から、レベル3(渋滞走行)へ移行される場合(上段)、および自動運転レベル2(ハンズオフ)から、レベル3(渋滞走行)へ移行される場合(下段)の、メータディスプレイ120における表示内容を示している。
自動運転レベルの変更前の段階において、HCU160は、上段、下段ともに、自車両10の周辺情報の表示を行う。
そして、上記のように、自動運転レベルが移行される間において、HCU160は、メッセージMを追加表示する。メッセージMの表示、更には、レベル変更後の表示については、図28の場合と同じである。
これにより、レベルの上がり方が大きいほど、メッセージMが強調表示されるので、ドライバは、自動運転レベルの移行内容(レベル差)に応じて、事前に備えることができる。
尚、メッセージMの表示形態として、HCU160は、レベルの上がり方に応じて、表示の位置を変える、また、表示の種類を増やす、また、表示時間を長くする等のアレンジを加えてもよい。このとき、メッセージMは、本来のメータディスプレイ120における表示内容に重ならないようにするのがよい。
また、メッセージMに対して、ドライバが自動運転レベル3への移行をキャンセルした場合に、現時点のレベルに応じて、メッセージMの表示形態を変えるようにしてもよい。例えば、レベル0でドライバがレベル3への移行をキャンセルした場合は、レベル3を望んでいない可能性が高いため、メッセージMを目立ちにくくするとよい。また、レベル2でキャンセルがあった場合は、レベル0でキャンセルをしたドライバと比較してドライバが再度レベル3を望む可能性が高くなるため、レベル0でキャンセルをした場合よりもメッセージMを目立ちやすくするとよい。
また、上記の図28、図29では、自動運転レベル3の走行パターンとして、渋滞走行の場合を例にして説明したが、予め設定された区間や高速道路での中速走行、高速走行での自動運転レベル3場合に適用してもよい。
(第4実施形態)
第4実施形態では、HCU160は、自動運転レベル2以下から、自動運転レベル3へ移行する際の走行パターンの違いに応じてレベル移行用のメッセージMを切替える。
自動運転レベル3における走行パターンは、例えば、渋滞走行時の自動運転(渋滞時レベル3)、あるいは。予め設定された区間(エリア)を走行する場合の自動運転(エリア限定レベル3)がある。
渋滞時レベル3のとき、HCU160は、メッセージMとして、例えば、「○○km/h以下のとき、周辺監視が不要です。運転以外のことができます。運転交代しますか」とすることができる。
また、エリア限定レベル3のとき、HCU160は、メッセージMとして、例えば、「○○JCTまで(○○km先まで)、周辺監視が不要です。運転以外のことができます。運転交代しますか」とすることができる。
このように、自動運転の走行パターンに応じて、メッセージMの内容を変えることで、ドライバに対して丁寧な提案を行うことができる。
(第5実施形態)
第5実施形態を図30に示す。第5実施形態では、HCU160は、自動運転レベル2以下から、自動運転レベル3へ移行する際のレベルの上がり方に対して、自動運転レベル3から自動運転レベル2以下へ移行する際のレベルの下がり方に応じて、レベル移行用のメッセージMを切替える。
1.レベルの上がり方よりも、下がり方が大きい場合
図30に示すように、HCU160は、レベルの上がり方よりも、レベルの下がり方が大きいほど、メッセージMをより強調する。
レベルの上がり下がりのパターンとして、例えば、レベル2→レベル3→レベル2の場合(図30の左側)、あるいは、例えば、レベル2→レベル3→レベル0の場合(図30の右側)等が考えられる。HCU160は、レベルの下がり方が大きいほど、メッセージMを強調するためにより大きく表示する。
尚、メッセージMを強調するにあたっては、この他にも、メッセージMの数を多くする、メッセージMを出すタイミングを早くする等とすることができる。
更に、レベルの上がり方よりも、下がり方が大きい場合で、ドライバが運転交代を失敗したときのメッセージMを強調するようにしてもよい。
このように、自動運転のレベル差に応じて、メッセージMの強調度合いを変えることで、ドライバに対する提案を確実に伝えることができる。
2.レベル3になる前のレベルがレベル1以下の場合
HCU160は、自動運転レベル2以下から、自動運転レベル3へ移行する際の元のレベルが自動運転レベル1以下であると、自動運転レベル3から自動運転レベル2以下へ移行する際に、一旦、自動運転レベル2へ移行してよいか確認するための表示を行う。
HCU160は、確認のためのメッセージMを、例えば、「この先、運転交代の必要があります。追従走行(ACC)、および車線内維持走行(LTA)を継続しますか」とすることができる。
上記メッセージMに対して、ドライバが採用とした場合は、HCU160は、次にのメッセージMとして、「前を向いてください」(ハンズオフ可能な場合)、あるいは、「ハンドルを握ってください」(ハンズオンのとき)、とすることができる。
また、上記メッセージMに対して、ドライバがキャンセルした場合は、CHU160は、次のメッセージMとして、「手動運転に切替えます。ハンドルを握り、手動運転を開始してください」とすることができる。
このように、レベル3になる前のレベルがレベル1以下の場合、確認のためのメッセージMを表示することで、ドライバに対する提案を確実に伝えることができる。
3.ドライバの操作部へのタッチ行為がある場合
HCU160は、自動運転レベル2以下から、自動運転レベル3へ移行する際の元のレベルが自動運転レベル1以下であると、自動運転レベル3から自動運転レベル2以下へ移行する際に、ドライバの運転操作に対応する操作部へのタッチ行為があると、即、手動運転へ移行してよいか確認するための表示を行う。
ドライバの運転操作に対応する操作部へのタッチ行為というのは、例えば、ドライバがハンドルを握る、アクセルを踏む等のオーバーライドである。
HCU160は、メッセージMとして、「追従走行(ACC)、および車線内維持走行(LTA)が継続可能です。手動運転に切替えますか」とすることができる。
このように、レベル3になる前のレベルがレベル1の場合、ドライバのオーバーライドがあると、手動運転へ移行してよいかというメッセージMを表示することで、ドライバの行動に見合った提案を行うことができる。
(第6実施形態)
第6実施形態を図31、図32に示す。第6実施形態では、HCU160は、自動運転レベル3における自車両10の周辺画像を表示するにあたって、自動運転レベル3での車速値が高いほど、自車両10の前方エリアをより広くした表示にする。
HCU160は、前方エリアをより広く表示するにあたって、図31(a)に対して図31(b)に示すように、俯瞰表現における俯瞰位置を自車両10に対してより後方にする。あるいは、HCU160は、前方エリアをより広く表示するにあたって、図32(a)に対して図32(b)に示すように、俯瞰表現における俯瞰位置を自車両10に対してより高くする。
これにより、車速が高いほど、ドライバは前方の状況を確認しやすくなり、安全運転に繋げることができる。
図31、図32では、走行パターンとして、渋滞時レベル3の場合を例にしたが、エリア限定レベル3の場合でも同様である。また、自動運転レベル3の走行パターンが渋滞時レベル3かエリア限定レベル3かによって俯瞰位置を変化させてもよい。この場合、車速値が高いエリア限定レベル3の方が前方エリアをより広くした表示にする。
(第7実施形態)
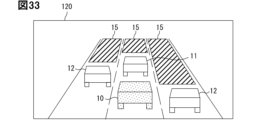
第7実施形態を図33に示す。第7実施形態では、HCU160は、渋滞走行における自動運転レベル3のときに、所定車速以下であると、前方側の他車両12を車両群15として表示する。所定車速は、例えば、50km/h程度の速度である。
車両群15は、例えば、周辺情報の図形中、前方側野他車両を平面的な図形として、ハッチングを施したものとしている。車両群15の範囲は、1つ前の先行車両11よりも更に前側の領域を対象としたり、先行車両11のすべてを対象としてもよい。
これにより、渋滞走行時では、個々の車両の状況を知る必要はなく、車両群15として捉えることで、渋滞の全体的な状況を的確に把握することができる。
また、1台ごとに他車両12を把握すると、車両のデータが増大して、表示制御における計算負荷が大きくなってしまうが、車両群15として表示することで、計算負荷を低減することができる。
(第8実施形態)
第8実施形態を図34に示す。第8実施形態では、HCU160は、隣車線の渋滞が緩和されても、渋滞走行における自動運転レベル3が継続される場合に、自動運転レベル3に対応する表示から自動運転レベル2以下に対応する表示に切替える。
これにより、ドライバは、渋滞走行が継続しているのか、していないのか分かりにくいときに、自動運転レベル3であっても、自動運転レベル2以下に対応する表示に切替えることで、周辺情報が提示され、より安全側の表示とすることができる。
(第9実施形態)
第9実施形態を図35に示す。第9実施形態では、HCU160は、自動運転レベル3のときであっても、走行状態、あるいは走行区間に応じて自動運転レベル2以下に対応する表示をした場合は、自動運転レベル3に対応したメッセージMを表示する。
例えば、渋滞走行時の自動運転レベル3において、自動運転レベル3が継続されているにもかかわらず、周辺車両の状況からして、自動運転レベル3が継続できるのか否かドライバが不安に思うような場合で、HCU160は、自動運転レベル3を継続していることを示すメッセージMを表示する。
更に具体的には、渋滞時レベル3で自動運転を実施しており、車速が上がったり、隣車線の渋滞が緩和した場合であっても、渋滞時レベル3が継続される場合、HCU160は、メータディスプレイ120における表示を、例えば、セカンドタスク表示(レベル3表示)から自車周辺の周辺情報(レベル2表示)に切替える。更に、HCU160は、渋滞時レベル3に対応するメッセージMを追加表示する。メッセージMは、図35に示すように、「スマートフォンの操作許可(セカンドタスク許可)」や、「渋滞時レベル3継続中」等の内容である。
尚、ドライバが、現在の自動運転レベルが把握できず、闇雲に操作デバイス150を操作したとき、HCU160は、上記のメッセージMを表示するようにしてもよい。
また、DSM20によって、ドライバがメータディスプレイ120(他の表示部を含む)を確認したと認識されたとき、HCU160は、上記のメッセージMを表示するようにしてもよい。
更に、エリア限定レベル3で自動運転を実施している場合で、自動運転が可能な走行区間が終了する前の段階(所定距離前の段階、所定時間前の段階)で、例えば、セカンドタスク表示(レベル3表示)から自車周辺の周辺情報(レベル2表示)に切替えると共に、エリア限定レベル3に対応するメッセージMを追加表示するようにしてもよい。
これにより、自動運転レベル3であっても、走行状態、あるいは走行区間に応じて表示を周辺情報(自動運転レベル2に対応する表示)に切替えることで、より安全側となる表示とすることができ、加えて、ドライバは、メッセージMが追加表示されることで、実際に実行されている自動運転レベルを把握することができる。
(第10実施形態)
第10実施形態では、HCU160は、渋滞走行時の渋滞時レベル3における解消時間が予測できないときに、所定の車速以下(例えば、20km/h以下)において、自車周辺の周辺情報の表示(レベル2表示)をオフにして、セカンドタスク表示(レベル3表示)にする。HCU160は、所定の車速を超えると周辺情報の表示を行う。
これにより、渋滞時レベル3における解消時間の予測が難しい場合であっても、車速を用いて表示内容を切替えることで、走行状態に応じた表示内容とすることができる。
(第11実施形態)
第11実施形態を図36、図37に示す。第11実施形態では、HCU160は、ドライバに表示すべき内容を、アイコンによって表示する。上記各実施形態では、ドライバに表示すべき内容を、例えば、文字や、画像によって表示したが、図36、図37に示すように、図柄を用いたアイコンとしてもよい。
図36では、ドライバのアイズオンの要否について、頭部の図柄と視線方向の矢印とで示している。また、ドライバのハンズオンの要否について、ハンドルと手の図柄にて示している。また、ドライバのレッグオンの要否について、アクセルペダルと足の図柄にて示している。
図37では、セカンドタスクに対応するメッセージをアイコンにした例を示している。図37(a)は、セカンドタスクとして、スマートフォンの操作を許可することを示している。図37(b)は、セカンドタスクとして、動画の再生を許可すること(再生ボタン)を示している。
これにより、表示すべき内容を、図柄を用いたアイコンとすることで、文字表示する場合に比べて、ドライバは直感的に表示内容を理解することができる。
(その他の実施形態)
この明細書および図面等における開示は、例示された実施形態に制限されない。開示は、例示された実施形態と、それらに基づく当業者による変形態様を包含する。例えば、開示は、実施形態において示された部品および/または要素の組み合わせに限定されない。開示は、多様な組み合わせによって実施可能である。開示は、実施形態に追加可能な追加的な部分をもつことができる。開示は、実施形態の部品および/または要素が省略されたものを包含する。開示は、ひとつの実施形態と他の実施形態との間における部品および/または要素の置き換え、または組み合わせを包含する。開示される技術的範囲は、実施形態の記載に限定されない。開示されるいくつかの技術的範囲は、請求の範囲の記載によって示され、更に請求の範囲の記載と均等の意味および範囲内での全ての変更を含むものと解されるべきである。
本開示に記載の制御部およびその手法は、コンピュータプログラムにより具体化された一つないしは複数の機能を実行するようにプログラムされたプロセッサ、およびメモリを構成することによって提供された専用コンピュータにより、実現されるようにした。
しかしながら、本開示に記載の制御部およびその手法は、一つ以上の専用ハードウエア理論回路によってプロセッサを構成することによって提供された専用コンピュータにより、実現されてもよい。
もしくは、本開示に記載の制御部およびその手法は、一つないしは複数の機能を実行するようにプログラムされたプロセッサおよびメモリと、一つ以上のハードウエア論理回路によって構成されたプロセッサとの組み合せにより構成された一つ以上の専用コンピュータにより、実現されてもよい。
また、コンピュータプログラムは、コンピュータにより実行されるインストラクションとして、コンピュータ読み取り可能な非遷移有形記録媒体に記憶されていてもよい。