JP7298699B2 - 車両遠隔制御方法及び車両遠隔制御装置 - Google Patents
車両遠隔制御方法及び車両遠隔制御装置 Download PDFInfo
- Publication number
- JP7298699B2 JP7298699B2 JP2021544947A JP2021544947A JP7298699B2 JP 7298699 B2 JP7298699 B2 JP 7298699B2 JP 2021544947 A JP2021544947 A JP 2021544947A JP 2021544947 A JP2021544947 A JP 2021544947A JP 7298699 B2 JP7298699 B2 JP 7298699B2
- Authority
- JP
- Japan
- Prior art keywords
- gesture
- vehicle
- determination area
- input
- remote control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


















Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/0011—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot associated with a remote control arrangement
- G05D1/0016—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot associated with a remote control arrangement characterised by the operator's input device
-
- G—PHYSICS
- G08—SIGNALLING
- G08C—TRANSMISSION SYSTEMS FOR MEASURED VALUES, CONTROL OR SIMILAR SIGNALS
- G08C17/00—Arrangements for transmitting signals characterised by the use of a wireless electrical link
- G08C17/02—Arrangements for transmitting signals characterised by the use of a wireless electrical link using a radio link
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/06—Automatic manoeuvring for parking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/08—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to drivers or passengers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/048—Interaction techniques based on graphical user interfaces [GUI]
- G06F3/0484—Interaction techniques based on graphical user interfaces [GUI] for the control of specific functions or operations, e.g. selecting or manipulating an object, an image or a displayed text element, setting a parameter value or selecting a range
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/048—Interaction techniques based on graphical user interfaces [GUI]
- G06F3/0487—Interaction techniques based on graphical user interfaces [GUI] using specific features provided by the input device, e.g. functions controlled by the rotation of a mouse with dual sensing arrangements, or of the nature of the input device, e.g. tap gestures based on pressure sensed by a digitiser
- G06F3/0488—Interaction techniques based on graphical user interfaces [GUI] using specific features provided by the input device, e.g. functions controlled by the rotation of a mouse with dual sensing arrangements, or of the nature of the input device, e.g. tap gestures based on pressure sensed by a digitiser using a touch-screen or digitiser, e.g. input of commands through traced gestures
- G06F3/04883—Interaction techniques based on graphical user interfaces [GUI] using specific features provided by the input device, e.g. functions controlled by the rotation of a mouse with dual sensing arrangements, or of the nature of the input device, e.g. tap gestures based on pressure sensed by a digitiser using a touch-screen or digitiser, e.g. input of commands through traced gestures for inputting data by handwriting, e.g. gesture or text
Description
以下、本発明の実施形態を図面に基づいて説明する。図1は、本発明の車両の遠隔制御方法及び遠隔制御装置を適用したリモート駐車システム1を示すブロック図である。本明細書において「自律走行制御」とは、ドライバの運転操作に依ることなく、車載された走行制御装置の自動制御により、車両を走行させることをいう。「自律駐車制御」とは、自律走行制御の一種であって、ドライバの運転操作に依ることなく、車載された走行制御装置の自動制御により、車両を駐車(入庫又は出庫)させることをいう。また、「駐車」とは、駐車スペースへ車両を継続的に止めておくことをいうが、「走行経路」という場合には、駐車スペースへ車庫入れする場合の駐車経路のみならず、駐車スペースからの車庫出し経路をも含むものとする。その意味で、「駐車時の車両走行制御方法及び車両走行制御装置」は、駐車スペースへの車庫入れ時の車両の走行制御と、駐車スペースからの車庫出し時の車両走行制御との両方が含まれる。なお、車庫入れを入庫とも言い、車庫出しを出庫とも言う。以下の実施形態においては、本発明に係る遠隔制御方法及び遠隔制御装置を、遠隔制御された車両を自律走行制御により駐車するリモート駐車システムに適用した一例を挙げて、本発明の具体例を説明する。本実施形態のリモート駐車システム1は、ドライバなどの操作者が車両に乗車して当該操作者の介入操作が可能なアシストモードにより自律走行制御を行う。その後、操作者が車両から降車し、車両の外部から遠隔操作器を用いたリモートコントロールモードにより自律走行制御を行う。


次に、本発明の車両遠隔制御方法及び車両遠隔制御装置を適用したリモート駐車システムの第2実施形態について説明する。なお、第1実施形態と同様の構成については、第1実施形態と同符号を用いて詳しい説明は省略する。
次に、本発明の車両遠隔制御方法及び車両遠隔制御装置を適用したリモート駐車システムの第3実施形態について説明する。なお、第1実施形態と同様の構成については、第1実施形態と同符号を用いて詳しい説明は省略する。
次に、本発明の車両遠隔制御方法及び車両遠隔制御装置を適用したリモート駐車システムの第4実施形態について説明する。なお、第1実施形態と同様の構成については、第1実施形態と同符号を用いて詳しい説明は省略する。
次に、本発明の車両遠隔制御方法及び車両遠隔制御装置を適用したリモート駐車システムの第5実施形態について説明する。なお、第1実施形態と同様の構成については、第1実施形態と同符号を用いて詳しい説明は省略する。
11…目標駐車スペース設定器
12…車両位置検出器
13…物体検出器
14…駐車経路生成部
15…物体減速演算部
16…経路追従制御部
17…目標車速生成部
18…操舵角制御部
19…車速制御部
20…親機
22…子機
21…遠隔操作器
211…タッチパネル
212…ジェスチャ判定部
212a…入力ガイド
213…記憶部
214…指令部
215…通信部
G1~G7…指令ジェスチャ
Ip0…中心位置
Ga0、Ga1、Ga2…ジェスチャ判定エリア
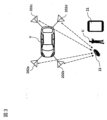
V…自車両
TPS…目標とする駐車スペース
R1,R2…駐車経路
W…壁(障害物)
H1,H2…家屋(障害物)
WD…植木(障害物)
Claims (17)
- 遠隔操作器により実行される車両遠隔制御方法において、
前記遠隔操作器は、
前記遠隔操作器のタッチパネルにおいて、操作者のタッチ操作が行われた入力位置を検出し、
前記入力位置に応じて、車両を遠隔制御するためのジェスチャを受け付けるジェスチャ判定エリアを可変とし、
前記ジェスチャ判定エリアにより、前記ジェスチャを検出し、
検出した前記ジェスチャが、予め設定した指令ジェスチャであるか否かを判定し、
前記ジェスチャが前記指令ジェスチャである場合、自律走行制御機能を備えた前記車両に自律走行制御を実行させ、
前記自律走行制御が開始される前において、予め設定された位置に第1の前記ジェスチャ判定エリアを設定し、
前記自律走行制御が開始された後において、前記入力位置に応じて、新たな前記ジェスチャ判定エリアを設定する、車両遠隔制御方法。 - 前記遠隔操作器は、
前記ジェスチャが非検出となった場合、非検出となる直前に設定したジェスチャ判定エリアを第2の前記ジェスチャ判定エリアとして記憶し、
前記ジェスチャの入力が再開された場合には、第2の前記ジェスチャ判定エリアにより、前記ジェスチャが前記指令ジェスチャであるか否かを判定する、請求項1に記載の車両遠隔制御方法。 - 前記遠隔操作器は、
前記ジェスチャが非検出となった後、前記ジェスチャの入力が再開された場合には、第1の前記ジェスチャ判定エリアにより、前記ジェスチャが前記指令ジェスチャであるか否かを判定する、請求項1に記載の車両遠隔制御方法。 - 前記ジェスチャが非検出になる場合とは、前記タッチパネルから操作者の指が離れた場合、前記ジェスチャが前記指令ジェスチャであると判定されなかった場合、あるいは操作者が前記ジェスチャの入力を途中で終了した場合である、請求項2又は3に記載の車両遠隔制御方法。
- 遠隔操作器により実行される車両遠隔制御方法において、
前記遠隔操作器は、
前記遠隔操作器のタッチパネルにおいて、操作者のタッチ操作が行われた入力位置を検出し、
前記入力位置に応じて、車両を遠隔制御するためのジェスチャを受け付けるジェスチャ判定エリアを可変とし、
前記ジェスチャ判定エリアにより、前記ジェスチャを検出し、
検出した前記ジェスチャが、予め設定した指令ジェスチャであるか否かを判定し、
前記ジェスチャが前記指令ジェスチャである場合、自律走行制御機能を備えた前記車両に自律走行制御を実行させ、
前記自律走行制御が開始される前において、前記入力位置に応じて、前記ジェスチャ判定エリアを可変に設定し、
前記自律走行制御が開始された後において、予め設定された位置に前記ジェスチャ判定エリアを設定する、車両遠隔制御方法。 - 前記遠隔操作器は、
前記タッチパネルに対する前記ジェスチャ判定エリアのサイズを可変とする、請求項1~5のいずれか一項に記載の車両遠隔制御方法。 - 前記遠隔操作器は、
前記ジェスチャ判定エリアのサイズを、予め設定した最小入力サイズと、最大入力サイズとの間で可変とする、請求項6に記載の車両遠隔制御方法。 - 前記遠隔操作器は、
前記自律走行制御が実行されている場合において、前記自律走行制御により前記車両が直進しているか否かを判定し、
直進している場合は、前記入力位置に応じて前記ジェスチャ判定エリアを設定し、
直進していない場合は、予め設定された位置に前記ジェスチャ判定エリアを設定する、請求項1~7のいずれか一項に記載の車両遠隔制御方法。 - 前記指令ジェスチャは、前記タッチパネルの横方向をX軸、縦方向をY軸としたときに、操作者のタッチ操作による入力位置の座標が、X軸とY軸の少なくとも一方において連続的に変化するタッチ操作である、請求項1~8のいずれか一項に記載の車両遠隔制御方法。
- 前記指令ジェスチャは、前記ジェスチャの1回の入力が開始される始端と、前記ジェスチャの1回の入力が終わる終端とが重なるような図形の軌跡を、前記タッチパネルに描くタッチ操作である、請求項9に記載の車両遠隔制御方法。
- 前記指令ジェスチャは、円環形状の図形の軌跡を前記タッチパネルに描くタッチ操作である、請求項10に記載の車両遠隔制御方法。
- 前記遠隔操作器は、
前記ジェスチャ判定エリアを、前記円環形状の図形の中心座標と、半径とによって規定する、請求項11に記載の車両遠隔制御方法。 - 前記遠隔操作器は、
前記ジェスチャが検出されなくなった場合、前記車両に自律走行制御を中止させる、請求項1~12のいずれか一項に記載の車両遠隔制御方法。 - 前記自律走行制御は、前記車両を駐車させる駐車制御である、請求項1~13のいずれか一項に記載の車両遠隔制御方法。
- 前記遠隔操作器は、
前記ジェスチャの形状を示す入力ガイドを前記タッチパネルに表示し、前記ジェスチャ判定エリアを、前記入力ガイドに対応した位置に設定する、請求項1~14のいずれか一項に記載の車両遠隔制御方法。 - 操作者によるタッチ操作の入力位置を検出するタッチパネルを備えた車両の遠隔操作器と、
前記入力位置に応じて、前記車両を遠隔制御するためのジェスチャを受け付けるジェスチャ判定エリアを可変とし、前記ジェスチャ判定エリアにより検出した前記ジェスチャが、予め設定した指令ジェスチャであるか否かを判定するジェスチャ判定部と、
前記ジェスチャが前記指令ジェスチャである場合、自律走行制御機能を備えた前記車両に自律走行制御を実行させる指令部と、を備える車両遠隔制御装置において、
前記ジェスチャ判定部は、
前記自律走行制御が開始される前において、予め設定された位置に第1の前記ジェスチャ判定エリアを設定し、
前記自律走行制御が開始された後において、前記入力位置に応じて、新たな前記ジェスチャ判定エリアを設定する、車両遠隔制御装置。 - 操作者によるタッチ操作の入力位置を検出するタッチパネルを備えた車両の遠隔操作器と、
前記入力位置に応じて、前記車両を遠隔制御するためのジェスチャを受け付けるジェスチャ判定エリアを可変とし、前記ジェスチャ判定エリアにより検出した前記ジェスチャが、予め設定した指令ジェスチャであるか否かを判定するジェスチャ判定部と、
前記ジェスチャが前記指令ジェスチャである場合、自律走行制御機能を備えた前記車両に自律走行制御を実行させる指令部と、を備える車両遠隔制御装置において、
前記ジェスチャ判定部は、
前記自律走行制御が開始される前において、前記入力位置に応じて、前記ジェスチャ判定エリアを可変に設定し、
前記自律走行制御が開始された後において、予め設定された位置に前記ジェスチャ判定エリアを設定する、車両遠隔制御装置。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/IB2019/001097 WO2021048582A1 (ja) | 2019-09-09 | 2019-09-09 | 車両遠隔制御方法及び車両遠隔制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JPWO2021048582A1 JPWO2021048582A1 (ja) | 2021-03-18 |
| JPWO2021048582A5 JPWO2021048582A5 (ja) | 2022-07-07 |
| JP7298699B2 true JP7298699B2 (ja) | 2023-06-27 |
Family
ID=74865676
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021544947A Active JP7298699B2 (ja) | 2019-09-09 | 2019-09-09 | 車両遠隔制御方法及び車両遠隔制御装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20220342415A1 (ja) |
| EP (1) | EP4030773B1 (ja) |
| JP (1) | JP7298699B2 (ja) |
| CN (1) | CN114616835A (ja) |
| WO (1) | WO2021048582A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114630774B (zh) * | 2019-09-09 | 2023-06-02 | 日产自动车株式会社 | 车辆远程控制方法及车辆远程控制装置 |
| JP7360483B2 (ja) | 2022-01-24 | 2023-10-12 | 本田技研工業株式会社 | 情報端末、制御システム、及び制御方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013012021A (ja) | 2011-06-29 | 2013-01-17 | Sony Corp | 情報処理装置、情報処理方法、プログラム、および遠隔操作システム |
| WO2013171898A1 (ja) | 2012-05-18 | 2013-11-21 | トヨタ自動車株式会社 | 車両の情報表示装置 |
| JP2014006883A (ja) | 2012-05-31 | 2014-01-16 | Canon Inc | 電子機器及び情報処理装置及びその制御方法 |
| WO2019163165A1 (ja) | 2018-02-23 | 2019-08-29 | アルプスアルパイン株式会社 | 車載器、携帯機、及び車両遠隔制御システム |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102013012394A1 (de) | 2013-07-26 | 2015-01-29 | Daimler Ag | Verfahren und Vorrichtung zur Fernsteuerung einer Funktion eines Fahrzeugs |
| WO2019030923A1 (ja) * | 2017-08-10 | 2019-02-14 | 日産自動車株式会社 | 駐車制御方法及び駐車制御装置 |
-
2019
- 2019-09-09 EP EP19944794.7A patent/EP4030773B1/en active Active
- 2019-09-09 JP JP2021544947A patent/JP7298699B2/ja active Active
- 2019-09-09 CN CN201980100173.1A patent/CN114616835A/zh active Pending
- 2019-09-09 WO PCT/IB2019/001097 patent/WO2021048582A1/ja active Application Filing
- 2019-09-09 US US17/640,990 patent/US20220342415A1/en active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013012021A (ja) | 2011-06-29 | 2013-01-17 | Sony Corp | 情報処理装置、情報処理方法、プログラム、および遠隔操作システム |
| WO2013171898A1 (ja) | 2012-05-18 | 2013-11-21 | トヨタ自動車株式会社 | 車両の情報表示装置 |
| JP2014006883A (ja) | 2012-05-31 | 2014-01-16 | Canon Inc | 電子機器及び情報処理装置及びその制御方法 |
| WO2019163165A1 (ja) | 2018-02-23 | 2019-08-29 | アルプスアルパイン株式会社 | 車載器、携帯機、及び車両遠隔制御システム |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2021048582A1 (ja) | 2021-03-18 |
| US20220342415A1 (en) | 2022-10-27 |
| EP4030773A1 (en) | 2022-07-20 |
| CN114616835A (zh) | 2022-06-10 |
| EP4030773B1 (en) | 2023-11-01 |
| EP4030773A4 (en) | 2022-10-19 |
| WO2021048582A1 (ja) | 2021-03-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111479726B (zh) | 停车控制方法及停车控制装置 | |
| JP7032568B2 (ja) | 車両走行制御方法及び車両走行制御装置 | |
| WO2019123587A1 (ja) | 駐車制御方法及び駐車制御装置 | |
| JP7276471B2 (ja) | 車両遠隔制御方法及び車両遠隔制御装置 | |
| JP7298699B2 (ja) | 車両遠隔制御方法及び車両遠隔制御装置 | |
| US11423784B2 (en) | Method for controlling a parking operation of a motor vehicle | |
| JP7271571B2 (ja) | 駐車時の車両走行制御方法及び車両走行制御装置 | |
| JP7250941B2 (ja) | 車両遠隔制御方法及び車両遠隔制御装置 | |
| JP6359233B1 (ja) | 車両誘導装置および車両誘導方法 | |
| JPH05127747A (ja) | 無人自走体の衝突防止運行方法及びその装置 | |
| RU2795911C1 (ru) | Способ дистанционного управления транспортным средством и устройство дистанционного управления транспортным средством | |
| JP7206103B2 (ja) | 車両走行制御方法及び車両走行制御装置 | |
| JP7278760B2 (ja) | 駐車時の車両走行制御方法及び車両走行制御装置 | |
| RU2795181C1 (ru) | Способ дистанционного управления транспортным средством и устройство дистанционного управления транспортным средством | |
| WO2021048891A1 (ja) | 移動体および移動体制御方法 | |
| RU2795171C1 (ru) | Способ и устройство дистанционного управления транспортным средством | |
| WO2021186529A1 (ja) | 駐車支援方法及び駐車支援システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220302 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220302 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230117 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230309 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230516 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230529 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7298699 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |