JP7101869B2 - シンクロナスリラクタンスモータ - Google Patents
シンクロナスリラクタンスモータ Download PDFInfo
- Publication number
- JP7101869B2 JP7101869B2 JP2021508348A JP2021508348A JP7101869B2 JP 7101869 B2 JP7101869 B2 JP 7101869B2 JP 2021508348 A JP2021508348 A JP 2021508348A JP 2021508348 A JP2021508348 A JP 2021508348A JP 7101869 B2 JP7101869 B2 JP 7101869B2
- Authority
- JP
- Japan
- Prior art keywords
- max
- arc
- rotor core
- reluctance motor
- slit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
































Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/24—Rotor cores with salient poles ; Variable reluctance rotors
- H02K1/246—Variable reluctance rotors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K19/00—Synchronous motors or generators
- H02K19/02—Synchronous motors
- H02K19/10—Synchronous motors for multi-phase current
- H02K19/103—Motors having windings on the stator and a variable reluctance soft-iron rotor without windings
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K2213/00—Specific aspects, not otherwise provided for and not covered by codes H02K2201/00 - H02K2211/00
- H02K2213/03—Machines characterised by numerical values, ranges, mathematical expressions or similar information
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Synchronous Machinery (AREA)
- Iron Core Of Rotating Electric Machines (AREA)
Description
特許文献1には、ロータコアにスリットを等間隔角度に配置し、トルクリプルを低減する方法について記載されているが、トルクリプルの低減のみを吟味しており、出力トルクの大小までは検討されていない。
本発明は、上記のような課題を解決するためになされたものであり、高出力トルクと低トルクリプルを両立することのできるシンクロナスリラクタンスモータを得ることを目的とする。
内周面に沿って等間隔に配列されたS個のスロットが形成された円環状のステータコアと、
各スロットに格納された巻線と、
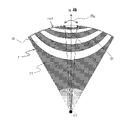
ステータコアの内面側に、円筒状で磁極の数がPであり、円筒の中心軸方向に見たときに磁極毎に円筒中心に向かって凸となり各頂点がq軸上に位置する円弧状の開口部からなる複数のスリットが設けられたロータコアとを備え、
ロータコアの一極に設けられた複数のスリットの数をb max とし、複数のスリットにおいてロータコアの外周面に最も近接するスリットを1番目のスリットとし、bおよびnを1以上の整数とし、ロータコアの外周面から円筒中心に向かってb番目のスリットにおいて、b番目のスリットをなす開口部の円筒中心に近い内縁をn=2b番目の円弧、b番目のスリットをなす開口部の内縁に対向する外縁をn=2b-1番目の円弧と規定し、円筒中心に最も近接するb max 番目のスリットの内縁の円弧をn max 番目の円弧と規定する場合に、
n番目の円弧は、q軸上に沿ってロータコアの外周面から距離D(n)の位置に円弧中心点を有し、円弧中心点に対するn番目の円弧の半径をR(n)とする場合に、
距離D(n)と半径R(n)との比率k(n)は、
k(n)=D(n)/R(n)
によって規定され、n max 番目の円弧に対する比率k(n max )は、
0.20≦k(n max )≦0.37
の範囲であり、
n番目の円弧に対する比率k(n)は、
k(n max )<・・・<k(n)<・・・<k(1)<1
の関係を満たし、
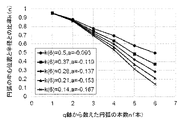
横軸にnをとり、かつ縦軸に比率k(n)をとったグラフに、比率k(1)からk(n max )の各数値をプロットした点群を直線近似した場合の傾きaが、
(-0.92/n max )≦a≦(-0.71/n max )
の範囲内となるように、1からn番目の円弧にそれぞれ対応する比率k(1)からk(n)の値を決定するものである。
図1は、本発明を実施するための実施の形態1に係るシンクロナスリラクタンスモータ1を利用する際のシステムを示す構成図である。図1において、シンクロナスリラクタンスモータ1は、電源供給ライン2を介して制御装置3と接続され、制御装置3から供給される電気エネルギーを機械エネルギーに変換する電気機械である。
また、zを相数、Pを極数、Qを毎極毎相あたりのスロット数とするとき、ステータ6のスロット14の間隔よりも大きい間隔(360°/S<θ:S=P×z×Q)、でスリット15を設けると、q軸でのインダクタンスが増加するため、出力トルクが十分に捻出できないおそれがあり、ステータ6のスロット14の1/2倍の間隔よりも小さい間隔(θ<360°/2S)でスリット15を設けると、スリット15の間隔が狭くなるので、ロータコア11の打ち抜きが困難となるため、製造コストが増加してしまうおそれがある。
つまり、トルクおよびモータの製造性を考えた場合、360/(2×P×z×Q)<θ<360/(P×z×Q)にすることが望ましい。
これを整理すると、360/(2×P×z)<θ×Q<360/(P×z)と表される。
360°/(2×P×z) < θ×Q <360°/(1.25×P×z) ・・・(1)
ここで、zは相数を表しており、本実施の形態ではz=3であるため、(1)式の左辺は、360°/(2×6×3)=10となり、右辺も同様に計算すると16となる。
つまり、スリット15を式(1)に示した範囲内の間隔θで設けることによって、スリット15の間隔θがより広い構成で、低トルクリプルかつ高出力トルクを実現できる。
360°/(2×P×z) < θ×Q <360°/(1.16×P×z) ・・・(2)
ここで、式(1)の範囲よりも式(2)のほうが広いが、図12、図13に示した6極36スロットのシンクロナスリラクタンスモータ1の解析結果と同様、スリット15を式(1)に示した範囲内の間隔θで設けることによって、毎極毎相Qによらず低トルクリプルかつ高出力トルクを実現できる。特に、毎極毎相Q=3の場合においては、低トルクリプルと高出力トルクを実現する範囲を式(2)にすることで実現できる。
本発明を実施するための実施の形態2では、高出力トルク化および低トルクリプル化を図るため、スリット15を構成する好適な円弧形状について説明する。
図16に示すbは、磁極毎に設けられたスリット15の番号を示しており、図16に示す磁極毎に設けられたスリット15において、複数のスリット15においてロータコア11の外周面に最も近接するスリット15を1番目のスリットとする場合、1番目のスリットに近いものから順に2番目、3番目・・・b番目のスリットとする。すなわち、bは、1以上の整数としている。
図16に示すnは、磁極毎に設けられたスリット15の外縁(中心Oから遠い方の縁)及び内縁(中心Oから近い方の縁)の円弧の番号を示しており、例えば、b番目のスリット15の外縁をn=2b-1番目の円弧とし、内縁をn=2b番目の円弧とする。図16で示す円弧は、スリット数が3なので、n=1~6の値を取りうる。すなわち、nは、1以上の整数としている。
(2bmax-1)×θ≦360/P ・・・(3)
式(3)にしたがって決定されるbmaxは、式(3)を満たす最大の自然数である。
bmax番目のスリットの内縁を、ロータコア11の一磁極に設けうるスリット15の最大数bmaxに対する円弧の最大数nmaxとするとき、円弧の最大数nmaxは、bmaxの2倍である。つまり、nmax=2bmaxとなる。例えば、図16の構成では、bmax=3となり、nmax=6となる。なお、設けられるスリット15はd軸及びq軸に対して対称の形状である。
k(n)=D(n)/R(n) ・・・(4)
距離D(n)は、n番目の円弧によって決定される定数であり、n番目の円弧に対する比率k(n)に伴い、n番目の円弧の半径R(n)が取りうる値が変化する。ただし、比率k(n)は、以下の式(5)の関係を満たす。
k(nmax)<・・・<k(n)<・・・<k(1)<1 ・・・(5)
なお、円弧は、例えば直線などで近似的に円弧形状を模擬したものも同様の形状とみなす。
図16に示したq軸上のロータ7の半径となる点を点Xとし、nmax番目の円弧がロータコア11の外周面と交わる点を点Y及び点Y´とする。式(3)に基づき、bmaxが決定すると、円弧の取りうる最大の値nmaxを決定することができる。比率k(nmax)は、以下に示す式(6)の範囲において決定される。式(6)の算出方法については、後で詳述する。
0.20≦k(nmax)≦0.37 ・・・(6)
nmax番目の円弧の半径R(nmax)は、点Y、点Y´を通る円の半径であり、q軸上に円弧中心Qを有するため、比率k(nmax)が決定されると式(4)に基づき、nmax番目の円弧の半径R(nmax)と距離D(nmax)が決定する。
なお、図16においては、D(1)>D(2)>D(3)>D(4)>D(5)>D(6)の場合について図示したが、必ずしも図16の順になる必要はなく、式(5)、(6)を満たすようにD(n)を決定すればよい。
図20は、各スリット幅21の角度と各コア幅の角度22とが(s=t=u)<(v=w)となるように設計したモデルを示しており、図21では、各スリット幅21の角度と各コア幅の角度22とが(s=t=u)>(v=w)となるように設計したモデルを示している。
(-0.92/nmax)≦a≦(-0.71/nmax) ・・・(7)
k(n)=k(nmax)-{a×(nmax-n)} ・・・(8)
しかし、1~(nmax-1)番目の円弧は、一定の傾きaとしてnmax番目の円弧から等間隔となるように決定する必要はなく、1~nmax番目の円弧に対する比率k(n)の傾きaが近似によって、式(7)で示す範囲内となるように決定すればよい。
その結果、ロータコア11における磁気飽和を緩和し、d軸インダクタンスが大きくなることによって、実施の形態1に係るシンクロナスリラクタンスモータ1よりさらに高出力トルクを実現することができ、スリット15の円弧形状の変化に伴うロータ7のパーミアンスの変化によって、ステータ6のパーミアンスの変化のタイミングと、ロータ7のパーミアンスの変化のタイミングがさらに合致しなくなるため、出力トルクの脈動を打ち消し、ステータ6のスロット14の間隔に起因するトルクリプルの増加をさらに抑制できる。
本発明を実施するための実施の形態3に係るシンクロナスリラクタンスモータ1では、ロータコア11の外周面に切り欠き31を設けたことを特徴としている。
θs<2×(360°/S) ・・・(9)
また、切り欠き31の幅をスリット15の間隔に応じたパーミアンス変化をロータコア11に付与することができるため、切り欠き31の幅に応じた成分のトルクリプルを低減できる。
本発明を実施するための実施の形態4に係るシンクロナスリラクタンスモータ1では、スリット15とロータコア11の外周面の間にブリッジ42を形成したことを特徴としている。
本発明を実施するための実施の形態5に係るシンクロナスリラクタンスモータ1では、スリット15とロータコア11の外周面の間に、各スリット15に対応したブリッジ42を形成したことを特徴としている。
また、実施の形態5に係るシンクロナスリラクタンスモータ1では、ロータコア11の外周面に近接するスリット15程、面取り部401の断面積に対する面取り部402の断面積の比率を大きくすることによって、各スリット15の直線部分41を長く形成でき、各スリット15での磁気抵抗の低下を抑制できるため、モータの電磁気性能の向上を図ることができる。
本発明を実施するための実施の形態6に係るシンクロナスリラクタンスモータ1は、スリット15にリブ51を設けたことを特徴としている。
2 電源供給ライン
3 制御装置
4 シャフト
5 フレーム
6 ステータ
7 ロータ
8 軸受
9 ステータコア
10 巻線
11 ロータコア
12 コアバック
13 ティース
14 スロット
15 スリット
21 スリット幅
22 コア幅
31 切り欠き
41 直線部分
42 ブリッジ
51 リブ
401、402 面取り部
Claims (11)
- 内周面に沿って等間隔に配列されたS個のスロットが形成された円環状のステータコアと、
前記各スロットに格納された巻線と、
前記ステータコアの内面側に、円筒状で磁極の数がPであり、前記円筒の中心軸方向に見たときに前記磁極毎に円筒中心に向かって凸となり各頂点がq軸上に位置する円弧状の開口部からなる複数のスリットが設けられたロータコアとを備え、
前記開口部における前記ロータコアの外周面に沿う短手方向の円弧の周方向における中点が隣り合う前記スリット間で前記円筒中心に対して互いになす角度θは、隣り合う各スリット間で同じであり、
d軸に最も近接する前記スリットの前記中点と前記d軸とが円筒中心に対してなす角度は、θ/2であり、
前記ロータコアの一極に設けられた前記複数のスリットの数をb max とし、前記複数のスリットにおいて前記ロータコアの外周面に最も近接する前記スリットを1番目のスリットとし、bおよびnを1以上の整数とし、前記ロータコアの外周面から前記円筒中心に向かってb番目のスリットにおいて、前記b番目のスリットをなす前記開口部の前記円筒中心に近い内縁をn=2b番目の円弧、前記b番目のスリットをなす前記開口部の前記内縁に対向する外縁をn=2b-1番目の円弧と規定し、前記円筒中心に最も近接するb max 番目のスリットの内縁の円弧をn max 番目の円弧と規定する場合に、
n番目の前記円弧は、q軸上に沿って前記ロータコアの外周面から距離D(n)の位置に円弧中心点を有し、前記円弧中心点に対する前記n番目の円弧の半径をR(n)とする場合に、
前記距離D(n)と前記半径R(n)との比率k(n)は、
k(n)=D(n)/R(n)
によって規定され、前記n max 番目の円弧に対する比率k(n max )は、
0.20≦k(n max )≦0.37
の範囲であり、
前記n番目の円弧に対する前記比率k(n)は、
k(n max )<・・・<k(n)<・・・<k(1)<1
の関係を満たし、
横軸に前記nをとり、かつ縦軸に前記比率k(n)をとったグラフに、前記比率k(1)からk(n max )の各数値をプロットした点群を直線近似した場合の傾きaが、
(-0.92/n max )≦a≦(-0.71/n max )
の範囲内となるように、1からn番目の円弧にそれぞれ対応する前記比率k(1)からk(n)の値を決定するシンクロナスリラクタンスモータ。 - 前記n max 番目の円弧に対する前記距離をD(n max )、n max -1番目の円弧に対する前記距離をD(n max -1)としたとき、
D(n max -1)>D(n max )
である請求項1記載のシンクロナスリラクタンスモータ。 - 前記比率k(n)は、
k(n)=k(n max )-{a×(n max -n)}
に基づき決定される請求項1または請求項2記載のシンクロナスリラクタンスモータ。 - 前記ロータコアの磁極の数をP、前記巻線に通電する電流の相の数をz、1つの前記磁極および1つの前記相あたりの前記スロットの数をQとすると、前記角度θは、
360°/(2×P×z) < θ×Q <360°/(1.25×P×z)
の範囲内である請求項1から請求項3のいずれか1項に記載のシンクロナスリラクタンスモータ。 - 前記ロータコアの磁極の数をP、前記巻線に通電する電流の相の数をz、1つの前記磁極および1つの前記相あたりの前記スロットの数をQとし、前記Qが3と等しいとき、前記角度θは、
360°/(2×P×z) < θ×Q <360°/(1.16×P×z)
の範囲内である請求項1から請求項3のいずれか1項に記載のシンクロナスリラクタンスモータ。 - 各前記開口部における短手方向の開口幅は、前記円筒中心側から前記ロータコアの外周面に近づくにつれて狭くなる請求項1から請求項5のいずれか1項に記載のシンクロナスリラクタンスモータ。
- 各前記開口部における短手方向の開口幅は、前記各スリット間に挟まれたロータコアの部位の幅よりも狭い請求項1から請求項6のいずれか1項に記載のシンクロナスリラクタンスモータ。
- q軸と交差する前記ロータコアの外周面に切り欠きが設けられ、
前記切り欠きの前記ロータコアの外周面に沿った両端が前記円筒中心に対してなす角度θsは、
θs<2×(360°/S)
の範囲である請求項1から請求項7のいずれか1項に記載のシンクロナスリラクタンスモータ。 - 各前記開口部における前記ロータコアの外周面に沿った円弧の中点から前記ロータコアの外周面に至る垂線と前記開口部の内縁に沿って前記ロータコアの外周面に至る延長線とに挟まれた前記ロータコアの部位である第1面取り部の断面積が、前記中点から前記ロータコアの外周面に至る垂線と前記開口部の外縁に沿って前記ロータコアの外周面に至る延長線に挟まれた前記ロータコアの部位である第2面取り部の断面積より大きいことを特徴とする請求項1から請求項8のいずれか1項に記載のシンクロナスリラクタンスモータ。
- 前記第2面取り部の断面積に対する前記第1面取り部の断面積の比率は、q軸に近接する前記スリットに対応する前記第1面取り部の断面積ほど、大きい請求項9に記載のシンクロナスリラクタンスモータ。
- 前記開口部を複数の部位に分断するリブを有する請求項1から請求項10のいずれか1項に記載のシンクロナスリラクタンスモータ。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2019/011967 WO2020194363A1 (ja) | 2019-03-22 | 2019-03-22 | シンクロナスリラクタンスモータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2020194363A1 JPWO2020194363A1 (ja) | 2021-12-02 |
| JP7101869B2 true JP7101869B2 (ja) | 2022-07-15 |
Family
ID=72609314
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021508348A Active JP7101869B2 (ja) | 2019-03-22 | 2019-03-22 | シンクロナスリラクタンスモータ |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11881749B2 (ja) |
| JP (1) | JP7101869B2 (ja) |
| CN (1) | CN113597725B (ja) |
| DE (1) | DE112019007071T5 (ja) |
| WO (1) | WO2020194363A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024069921A1 (ja) * | 2022-09-30 | 2024-04-04 | 三菱電機株式会社 | シンクロナスリラクタンスモータ及び鉄道車両用の駆動装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6509667B1 (en) | 2000-09-08 | 2003-01-21 | Delphi Technologies, Inc. | Rotor for a reluctance motor |
| WO2016139991A1 (ja) | 2015-03-03 | 2016-09-09 | 三菱電機株式会社 | リラクタンスモータ、およびリラクタンスモータに用いられるロータコアの製造方法 |
| JP2017184386A (ja) | 2016-03-29 | 2017-10-05 | 株式会社ジェイテクト | シンクロナスリラクタンスモータ |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002136074A (ja) * | 2000-10-30 | 2002-05-10 | Matsushita Electric Ind Co Ltd | ロータコア |
| US20070152527A1 (en) * | 2005-12-23 | 2007-07-05 | Okuma Corporation | Reluctance motor |
| JP2009077458A (ja) | 2007-09-18 | 2009-04-09 | Mitsui High Tec Inc | リラクタンスモータ用回転子積層鉄心 |
| JP5939913B2 (ja) * | 2012-07-17 | 2016-06-22 | 日立オートモティブシステムズ株式会社 | 回転電機および電動車両 |
| EP2887503B1 (en) * | 2012-08-16 | 2018-11-14 | Mitsuba Corporation | Rotor for use in magnet-assisted reluctance motor, and brushless motor |
| JP2017017957A (ja) * | 2015-07-06 | 2017-01-19 | 株式会社ジェイテクト | シンクロナスリラクタンスモータ |
| RU2677871C1 (ru) * | 2015-07-17 | 2019-01-22 | Сименс Акциенгезелльшафт | Реактивный ротор с дополнительным собственным намагничиванием |
| JP2017079530A (ja) * | 2015-10-20 | 2017-04-27 | 株式会社ジェイテクト | シンクロナスリラクタンスモータ |
| JP2017208910A (ja) * | 2016-05-17 | 2017-11-24 | オークマ株式会社 | 同期電動機の回転子 |
| JP2017229120A (ja) * | 2016-06-20 | 2017-12-28 | 株式会社ジェイテクト | シンクロナスリラクタンスモータ |
| CN108736601B (zh) * | 2017-04-17 | 2020-10-27 | 日本电产株式会社 | 转子、具有该转子的马达以及降低转子的转矩链波的方法 |
-
2019
- 2019-03-22 WO PCT/JP2019/011967 patent/WO2020194363A1/ja active Application Filing
- 2019-03-22 DE DE112019007071.1T patent/DE112019007071T5/de active Pending
- 2019-03-22 CN CN201980094132.6A patent/CN113597725B/zh active Active
- 2019-03-22 US US17/429,944 patent/US11881749B2/en active Active
- 2019-03-22 JP JP2021508348A patent/JP7101869B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6509667B1 (en) | 2000-09-08 | 2003-01-21 | Delphi Technologies, Inc. | Rotor for a reluctance motor |
| WO2016139991A1 (ja) | 2015-03-03 | 2016-09-09 | 三菱電機株式会社 | リラクタンスモータ、およびリラクタンスモータに用いられるロータコアの製造方法 |
| JP2017184386A (ja) | 2016-03-29 | 2017-10-05 | 株式会社ジェイテクト | シンクロナスリラクタンスモータ |
Also Published As
| Publication number | Publication date |
|---|---|
| CN113597725A (zh) | 2021-11-02 |
| JPWO2020194363A1 (ja) | 2021-12-02 |
| CN113597725B (zh) | 2023-06-02 |
| US20220216776A1 (en) | 2022-07-07 |
| US11881749B2 (en) | 2024-01-23 |
| WO2020194363A1 (ja) | 2020-10-01 |
| DE112019007071T5 (de) | 2021-12-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8436504B2 (en) | Stator for an electric machine | |
| JP5811565B2 (ja) | 回転子および永久磁石電動機 | |
| US8841807B2 (en) | Rotary electric machine with improved magnetic resistance | |
| US7705502B2 (en) | Interior magnet machine with non-perpendicular slots | |
| JP3415406B2 (ja) | 磁石内包型交流電動機およびその設計方法 | |
| US20090261679A1 (en) | Rotating electrical machine | |
| JP4901839B2 (ja) | 電動機及び圧縮機及び送風機及び換気扇 | |
| US8350435B2 (en) | Interior magnet machine with reduced cogging | |
| KR101996687B1 (ko) | 전기 기계에서의 토크 리플 감소 | |
| US10693331B2 (en) | Synchronous machine with magnetic rotating field reduction and flux concentration | |
| Dajaku et al. | New methods for reducing the cogging torque and torque ripples of PMSM | |
| EP3261219A1 (en) | Synchronous reluctance motor | |
| US10432043B2 (en) | Slotted rotor-bridge for electrical machines | |
| WO2020194390A1 (ja) | 回転電機 | |
| JP6507956B2 (ja) | 永久磁石式回転電機 | |
| JP7101869B2 (ja) | シンクロナスリラクタンスモータ | |
| WO2017171037A1 (ja) | ロータ及びロータの設計方法 | |
| JP2021016205A (ja) | シンクロナスリラクタンスモータ | |
| EP1540798B1 (en) | A synchronous electrical machine | |
| CN109997290B (zh) | 同步磁阻型旋转电机 | |
| JP7114005B1 (ja) | 回転電機 | |
| JP6929379B2 (ja) | 永久磁石式回転電機 | |
| CN108781032B (zh) | 旋转电机 | |
| CN117795825A (zh) | 转子及旋转电机 | |
| JP2021019406A (ja) | リラクタンスモータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210719 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210719 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220607 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220705 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7101869 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |