JP7094792B2 - 振動波モータ及び駆動装置 - Google Patents
振動波モータ及び駆動装置 Download PDFInfo
- Publication number
- JP7094792B2 JP7094792B2 JP2018117034A JP2018117034A JP7094792B2 JP 7094792 B2 JP7094792 B2 JP 7094792B2 JP 2018117034 A JP2018117034 A JP 2018117034A JP 2018117034 A JP2018117034 A JP 2018117034A JP 7094792 B2 JP7094792 B2 JP 7094792B2
- Authority
- JP
- Japan
- Prior art keywords
- flexible
- fixing
- vibration wave
- wave motor
- fixed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/001—Driving devices, e.g. vibrators
- H02N2/0015—Driving devices, e.g. vibrators using only bending modes
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/005—Mechanical details, e.g. housings
- H02N2/0055—Supports for driving or driven bodies; Means for pressing driving body against driven body
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/0075—Electrical details, e.g. drive or control circuits or methods
- H02N2/0085—Leads; Wiring arrangements
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/02—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors
- H02N2/026—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors by pressing one or more vibrators against the driven body
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/04—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification
- G02B7/08—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification adapted to co-operate with a remote control mechanism
Landscapes
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
- Lens Barrels (AREA)
Description
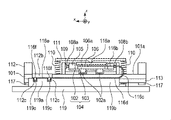
以下に、本発明の好ましい実施の形態を図1から図5を用いて説明する。図面において、後述する振動子104と摩擦部材101の相対移動の方向をX方向(第2の方向)、後述するバネ110によって振動子104を摩擦部材101に加圧接触する加圧方向をZ方向(第1の方向)とする。また、X方向とZ方向に直交する方向をY方向(第3の方向)と定義する。
101 摩擦部材
101a 摺動面
102 振動板
103 圧電素子
104 振動子
110 バネ
112 固定部材
112b フレキ固定部
112c フレキ位置決め突起
113 ガイド部材
114 転動ボール
115 可動ガイド部材
116 フレキシブル基板
116a 接合部
116b 第1の伸延部
116c 屈曲部
116d 第2の伸延部
116e 被固定部
116f 穴部
119 第2の固定部材
119a 第2のフレキ固定部
119b フレキ当接部
Claims (8)
- 圧電素子と振動板とからなる振動子と、
加圧力によって前記振動子が第1の方向に加圧接触する摺動面を有する摩擦部材と、
前記摺動面が設けられた側の前記摩擦部材の反対側に配置され、前記振動子と前記摩擦部材の相対的な移動をガイドするガイド部材と、
電圧を前記振動子に印加するフレキシブル基板と、
前記摩擦部材、前記ガイド部材及び前記フレキシブル基板を固定する固定部材と、
を備え、
前記振動子と前記摩擦部材とは、第2の方向に相対的に移動し、
前記固定部材は、前記フレキシブル基板を固定するフレキ固定部を備え、
前記フレキシブル基板は、前記圧電素子に接合される接合部と、前記第2の方向に沿って伸延する第1の伸延部と、該第1の伸延部を反転して折り返す屈曲部と、前記フレキ固定部に固定される被固定部と、を備え、
前記フレキシブル基板は、前記摩擦部材に前記振動子が加圧接触する方向と反対の方向に設けられた前記フレキ固定部の面に固定されることを特徴とする、振動波モータ。 - 前記フレキ固定部は、前記第1の方向において前記第1の伸延部と前記被固定部の間に配置されることを特徴とする、請求項1に記載の振動波モータ。
- 前記第1の伸延部は、前記第1の方向及び前記第2の方向に対して直交する方向に前記接合部から離間して前記第2の方向に沿って伸延し、前記屈曲部は、前記第1の伸延部を前記第2の方向に反転して折り返すことを特徴とする、請求項1又は2に記載の振動波モータ。
- 前記フレキシブル基板は、前記屈曲部と前記被固定部との間で前記第2の方向に沿って伸延する第2の伸延部を備え、
前記フレキ固定部は、前記第1の方向に突出したフレキ位置決め突起を備え、前記フレキ位置決め突起は、前記被固定部が有する穴部に係合し、
前記固定部材を保持する第2の固定部材を更に備え、
前記フレキ固定部と対向する該第2の固定部材には第2のフレキ固定部が備えられ、
前記被固定部は、前記フレキ固定部と前記第2のフレキ固定部との間で挟持され、
前記第2のフレキ固定部は、前記第2の方向に延伸されており、前記第1の方向で前記第2の伸延部と当接するフレキ当接部を有することを特徴とする、請求項1乃至3のいずれか1項に記載の振動波モータ。 - 前記第1の方向と前記第2の方向とに直交する方向において、前記摩擦部材の両側に複数のバネが配置されており、複数の前記バネの内側に前記接合部が配置され、複数の前記バネの外側に前記第1の伸延部、前記屈曲部、前記第2の伸延部、前記被固定部、前記フレキ固定部がそれぞれ配置されていることを特徴とする、請求項4に記載の振動波モータ。
- 前記振動子と共に前記第2の方向に可動する可動ガイド部材と、前記摺動面の反対側に配置され、前記加圧力で前記ガイド部材と前記可動ガイド部材との間で挟持される転動ボールと、を更に備え、
前記第1の方向において、前記摺動面と前記転動ボールとの間に前記フレキ固定部が配置されていることを特徴とする、請求項1乃至5のいずれか1項に記載の振動波モータ。 - 前記電圧の印加により振動が励振され、前記振動波モータは、超音波モータであることを特徴とする、請求項1乃至6のいずれか1項に記載の振動波モータ。
- 請求項1乃至7のいずれか1項に記載の振動波モータと、
前記振動波モータにより駆動される被駆動部材と、を有することを特徴とする駆動装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018117034A JP7094792B2 (ja) | 2018-06-20 | 2018-06-20 | 振動波モータ及び駆動装置 |
| US16/440,388 US11245343B2 (en) | 2018-06-20 | 2019-06-13 | Vibration wave motor and driving device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018117034A JP7094792B2 (ja) | 2018-06-20 | 2018-06-20 | 振動波モータ及び駆動装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019221073A JP2019221073A (ja) | 2019-12-26 |
| JP2019221073A5 JP2019221073A5 (ja) | 2021-07-26 |
| JP7094792B2 true JP7094792B2 (ja) | 2022-07-04 |
Family
ID=68982335
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018117034A Active JP7094792B2 (ja) | 2018-06-20 | 2018-06-20 | 振動波モータ及び駆動装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US11245343B2 (ja) |
| JP (1) | JP7094792B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7207949B2 (ja) * | 2018-10-31 | 2023-01-18 | キヤノン株式会社 | 振動波モータ及び振動波モータを備えた駆動装置 |
| JP7358085B2 (ja) * | 2019-06-20 | 2023-10-10 | キヤノン株式会社 | 振動波モータおよび駆動装置 |
| JP7258674B2 (ja) | 2019-06-24 | 2023-04-17 | キヤノン株式会社 | 振動型モータ、レンズ装置、および、電子機器 |
| JP7258675B2 (ja) | 2019-06-24 | 2023-04-17 | キヤノン株式会社 | 振動型モータおよび光学機器 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016100928A (ja) | 2014-11-19 | 2016-05-30 | キヤノン株式会社 | 駆動装置 |
| JP2017200366A (ja) | 2016-04-28 | 2017-11-02 | キヤノン株式会社 | 振動波モータおよび振動波モータが搭載された電子機器 |
| JP2017198925A (ja) | 2016-04-28 | 2017-11-02 | キヤノン株式会社 | 振動波モータ及びこれを用いた装置 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06121560A (ja) * | 1992-10-07 | 1994-04-28 | Olympus Optical Co Ltd | 超音波モータ |
| JP5913857B2 (ja) | 2011-08-05 | 2016-04-27 | キヤノン株式会社 | 超音波モータ及びそれを有するレンズ装置 |
| JP5744670B2 (ja) | 2011-08-05 | 2015-07-08 | キヤノン株式会社 | 超音波モータ及びそれを有するレンズ装置 |
| JP5975614B2 (ja) | 2011-09-20 | 2016-08-23 | キヤノン株式会社 | 超音波モータ及びそれを有するレンズ装置 |
| JP6218501B2 (ja) | 2013-08-26 | 2017-10-25 | キヤノン株式会社 | 振動波モータ |
| JP6501487B2 (ja) | 2014-10-27 | 2019-04-17 | キヤノン株式会社 | 超音波モータ及び超音波モータを用いた駆動装置 |
| JP6448310B2 (ja) | 2014-10-30 | 2019-01-09 | キヤノン株式会社 | 振動子および超音波モータ |
| JP6570335B2 (ja) | 2015-06-17 | 2019-09-04 | キヤノン株式会社 | 振動型アクチュエータ、レンズ駆動装置および超音波モータ |
| JP6305377B2 (ja) * | 2015-08-04 | 2018-04-04 | キヤノン株式会社 | 振動型アクチュエータ、装置および光学機器 |
| JP6829555B2 (ja) | 2016-06-23 | 2021-02-10 | キヤノン株式会社 | 振動波モータ及びレンズ駆動装置 |
| JP6788493B2 (ja) * | 2016-12-22 | 2020-11-25 | キヤノン株式会社 | 振動波モータおよびこれを用いた装置 |
| JP6605012B2 (ja) | 2017-12-08 | 2019-11-13 | キヤノン株式会社 | 振動波モータ及び振動波モータを用いたレンズ駆動装置 |
-
2018
- 2018-06-20 JP JP2018117034A patent/JP7094792B2/ja active Active
-
2019
- 2019-06-13 US US16/440,388 patent/US11245343B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016100928A (ja) | 2014-11-19 | 2016-05-30 | キヤノン株式会社 | 駆動装置 |
| JP2017200366A (ja) | 2016-04-28 | 2017-11-02 | キヤノン株式会社 | 振動波モータおよび振動波モータが搭載された電子機器 |
| JP2017198925A (ja) | 2016-04-28 | 2017-11-02 | キヤノン株式会社 | 振動波モータ及びこれを用いた装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US11245343B2 (en) | 2022-02-08 |
| US20190393807A1 (en) | 2019-12-26 |
| JP2019221073A (ja) | 2019-12-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7094792B2 (ja) | 振動波モータ及び駆動装置 | |
| CN110112953B (zh) | 马达和包括马达的电子设备 | |
| CN110199216B (zh) | 驱动装置、光学装置和摄像装置 | |
| US11038439B2 (en) | Vibration-wave motor | |
| JP5683643B2 (ja) | リニア超音波モータ及びそれを有する光学装置 | |
| US10804820B2 (en) | Motor and apparatus using the same | |
| US20170315324A1 (en) | Motor and apparatus using the same | |
| JP2017200366A (ja) | 振動波モータおよび振動波モータが搭載された電子機器 | |
| JP6122452B2 (ja) | アクチュエータ | |
| WO2016002917A1 (ja) | 振動型アクチュエータ、レンズ鏡筒、撮像装置及び自動ステージ | |
| JP6882036B2 (ja) | 振動波モータ及び振動波モータを有する撮像装置 | |
| US10558011B2 (en) | Vibration actuator and electronic apparatus using vibration actuator | |
| JP2019039997A (ja) | 振動波モータおよび駆動装置 | |
| JP7112250B2 (ja) | 振動波モータ及び駆動装置 | |
| JP7016898B2 (ja) | 振動型モータ、レンズ装置、および、電子機器 | |
| JP7207949B2 (ja) | 振動波モータ及び振動波モータを備えた駆動装置 | |
| CN107947626B (zh) | 使用振子的马达以及电子设备 | |
| JP2018101045A (ja) | レンズ駆動装置、レンズ鏡筒及び撮像装置 | |
| CN107342705B (zh) | 马达和包括马达的电子设备 | |
| JP7581066B2 (ja) | 振動波駆動装置 | |
| JP7826073B2 (ja) | モータ、駆動装置、レンズ装置、および撮像装置 | |
| JP2020137237A (ja) | 振動波モータおよび振動波モータを備えた鏡筒駆動装置 | |
| JP7169851B2 (ja) | 振動波モータ及び振動波モータを使用したレンズ装置 | |
| JP6537482B2 (ja) | 振動波モータおよび電子機器 | |
| JP2019221072A (ja) | 振動波モータ及び振動波モータを備えた駆動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210610 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210610 |
|
| TRDD | Decision of grant or rejection written | ||
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220518 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220524 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220622 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7094792 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |