JP7066498B2 - 人力駆動車用制御装置 - Google Patents
人力駆動車用制御装置 Download PDFInfo
- Publication number
- JP7066498B2 JP7066498B2 JP2018083257A JP2018083257A JP7066498B2 JP 7066498 B2 JP7066498 B2 JP 7066498B2 JP 2018083257 A JP2018083257 A JP 2018083257A JP 2018083257 A JP2018083257 A JP 2018083257A JP 7066498 B2 JP7066498 B2 JP 7066498B2
- Authority
- JP
- Japan
- Prior art keywords
- human
- powered vehicle
- control
- unit
- state
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/20—Electric propulsion with power supplied within the vehicle using propulsion power generated by humans or animals
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J45/00—Electrical equipment arrangements specially adapted for use as accessories on cycles, not otherwise provided for
- B62J45/20—Cycle computers as cycle accessories
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J50/00—Arrangements specially adapted for use on cycles not provided for in main groups B62J1/00 - B62J45/00
- B62J50/20—Information-providing devices
- B62J50/21—Information-providing devices intended to provide information to rider or passenger
- B62J50/22—Information-providing devices intended to provide information to rider or passenger electronic, e.g. displays
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62K—CYCLES; CYCLE FRAMES; CYCLE STEERING DEVICES; RIDER-OPERATED TERMINAL CONTROLS SPECIALLY ADAPTED FOR CYCLES; CYCLE AXLE SUSPENSIONS; CYCLE SIDE-CARS, FORECARS, OR THE LIKE
- B62K25/00—Axle suspensions
- B62K25/04—Axle suspensions for mounting axles resiliently on cycle frame or fork
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M25/00—Actuators for gearing speed-change mechanisms specially adapted for cycles
- B62M25/08—Actuators for gearing speed-change mechanisms specially adapted for cycles with electrical or fluid transmitting systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M6/00—Rider propulsion of wheeled vehicles with additional source of power, e.g. combustion engine or electric motor
- B62M6/40—Rider propelled cycles with auxiliary electric motor
- B62M6/45—Control or actuating devices therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M6/00—Rider propulsion of wheeled vehicles with additional source of power, e.g. combustion engine or electric motor
- B62M6/40—Rider propelled cycles with auxiliary electric motor
- B62M6/55—Rider propelled cycles with auxiliary electric motor power-driven at crank shafts parts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M9/00—Transmissions characterised by use of an endless chain, belt, or the like
- B62M9/04—Transmissions characterised by use of an endless chain, belt, or the like of changeable ratio
- B62M9/06—Transmissions characterised by use of an endless chain, belt, or the like of changeable ratio using a single chain, belt, or the like
- B62M9/10—Transmissions characterised by use of an endless chain, belt, or the like of changeable ratio using a single chain, belt, or the like involving different-sized wheels, e.g. rear sprocket chain wheels selectively engaged by the chain, belt, or the like
- B62M9/12—Transmissions characterised by use of an endless chain, belt, or the like of changeable ratio using a single chain, belt, or the like involving different-sized wheels, e.g. rear sprocket chain wheels selectively engaged by the chain, belt, or the like the chain, belt, or the like being laterally shiftable, e.g. using a rear derailleur
- B62M9/121—Rear derailleurs
- B62M9/122—Rear derailleurs electrically or fluid actuated; Controls thereof
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2200/00—Type of vehicles
- B60L2200/12—Bikes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2250/00—Driver interactions
- B60L2250/12—Driver interactions by confirmation, e.g. of the input
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2250/00—Driver interactions
- B60L2250/16—Driver interactions by display
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2250/00—Driver interactions
- B60L2250/26—Driver interactions by pedal actuation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J1/00—Saddles or other seats for cycles; Arrangement thereof; Component parts
- B62J1/08—Frames for saddles; Connections between saddle frames and seat pillars; Seat pillars
- B62J2001/085—Seat pillars having mechanisms to vary seat height, independently of the cycle frame
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Power Engineering (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Description
本発明の目的は、人力駆動車用コンポーネントを好適に制御できる人力駆動車用制御装置を提供することである。
第1側面の人力駆動車用制御装置によれば、インターフェース部への操作を検出不能な場合にも、第2制御状態でモータを制御できる。このため、人力駆動車用コンポーネントを好適に制御できる。
第2側面の人力駆動車用制御装置によれば、インターフェース部の操作部によってユーザがインターフェース部へ直接的に操作を行うことができる。
第3側面の人力駆動車用制御装置によれば、第1操作部によってユーザがモータによるアシスト力の出力、および、人力駆動車に入力される人力駆動力に対するモータによるアシスト力の比率の少なくとも1つを変更できる。
第4側面の人力駆動車用制御装置によれば、インターフェース部が接続されないことによってインターフェース部への操作を検出不能な場合、モータを第2制御状態で制御できる。
第5側面の人力駆動車用制御装置によれば、インターフェース部への操作の検出結果に異常が生じたことによって、インターフェース部への操作を検出不能な場合、モータを第2制御状態で制御できる。
第6側面の人力駆動車用制御装置によれば、インターフェース部への操作を検出可能な場合は、インターフェース部の第2操作部によって第1制御状態および第2制御状態をユーザが選択できる。
第7側面の人力駆動車用制御装置によれば、第2制御状態において、人力駆動車の走行状態または走行環境に応じてモータを好適に制御できる。
第8側面の人力駆動車用制御装置によれば、人力駆動車用コンポーネントが変速機を備える第1装備状態と、変速機を備えない第2装備状態とのそれぞれに適したモードで制御を行える。
第9側面の人力駆動車用制御装置によれば、第1装備状態、かつ、インターフェース部への操作を検出可能な場合は、第3制御状態で変速機を制御できる。
第10側面の人力駆動車用制御装置によれば、第1装備状態、かつ、インターフェース部への操作を検出不能な場合は、第4制御状態で変速機を制御できる。
第11側面の人力駆動車用制御装置によれば、第4制御状態において、人力駆動車の走行状態または走行環境に応じて変速機を好適に制御できる。
第12側面の人力駆動車用制御装置によれば、インターフェース部の第3操作部によって、変速機を動作させることができる。
第13側面の人力駆動車用制御装置によれば、インターフェース部の表示部によってユーザが人力駆動車用コンポーネントに関する情報を把握できる。
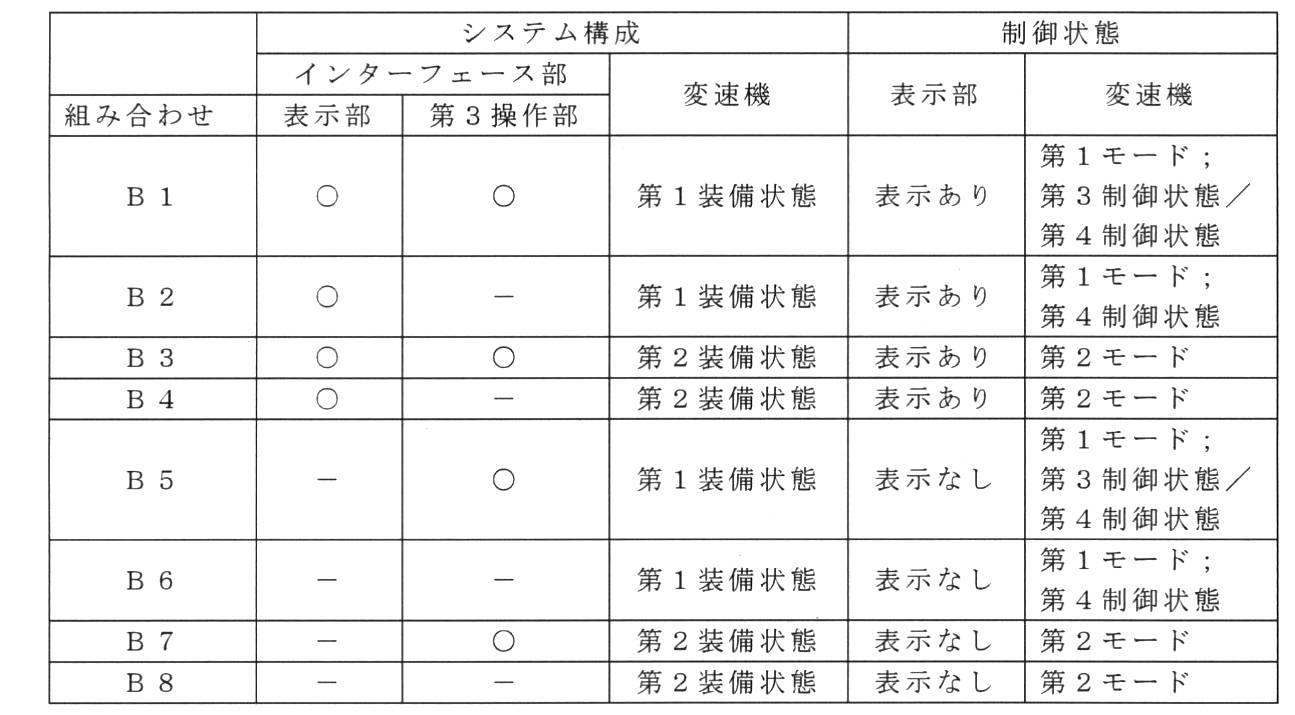
第14側面の人力駆動車用制御装置によれば、第1装備状態かつ変速機を検出できない場合、および、第2装備状態の場合の少なくとも一方の場合に適した表示状態に変更できる。
第15側面の人力駆動車用制御装置によれば、電動サスペンションを含む人力駆動車用コンポーネントを好適に制御できる。
第16側面の人力駆動車用制御装置によれば、電動アジャスタブルシートポストを含む人力駆動車用コンポーネントを好適に制御できる。
第17側面の人力駆動車用制御装置によれば、制御部は、インターフェース部と有線または無線通信によって接続できる。
第18側面の人力駆動車用制御装置によれば、制御部は、人力駆動車用コンポーネントと有線または無線通信によって接続できる。
第18側面の人力駆動車用制御装置によれば、インターフェース部が制御部と非接続状態の場合にも、第2制御状態でモータを制御できる。このため、人力駆動車用コンポーネントを好適に制御できる。
第19側面の人力駆動車用制御装置によれば、第2制御状態において、人力駆動車の走行状態または走行環境に応じてモータを好適に制御できる。
図1~図4を参照して、実施形態の人力駆動車用制御装置60について説明する。以後、人力駆動車用制御装置60を、単に制御装置60と記載する。制御装置60は、人力駆動車10に設けられる。人力駆動車10は、少なくとも人力駆動力によって駆動することができる車である。人力駆動車10は、例えば、自転車を含む。人力駆動車10は、車輪の数が限定されず、例えば1輪車および3輪以上の車輪を有する車も含む。人力駆動車10は、例えばマウンテンバイク、ロードバイク、シティバイク、カーゴバイク、および、リカンベントなど種々の種類の自転車、ならびに、電動アシスト自転車(E-bike)を含む。以下、実施の形態において、人力駆動車10を、自転車として説明する。

制御部62は、第1装備状態、かつ、インターフェース部40への操作を検出可能な場合にインターフェース部40への操作に応じる第3制御状態で変速機36を制御する。例えば、制御部62は、第3制御状態の場合、第3操作部48に比率Rを変更するための操作が行われた場合、電動アクチュエータ38を介して変速機36を動作させ、比率Rを変更する。
制御部62は、第2装備状態の場合、変速機36の制御を行わない。例えば、第2装備状態において、第3操作部48に変速機36を変更するための操作が行われた場合、制御部62は、電動アクチュエータ38に比率Rを変更するための制御信号を出力しない。
実施形態に関する説明は、本発明に従う駆動システムが取り得る形態の例示であり、その形態を制限することを意図していない。本発明に従う駆動システムは、例えば以下に示される実施形態の変形例、および、相互に矛盾しない少なくとも2つの変形例が組み合わせられた形態を取り得る。以下の変形例において、実施形態の形態と共通する部分については、実施形態と同一の符号を付してその説明を省略する。
Claims (18)
- 人力駆動車の推進をアシストするためのモータを備える人力駆動車用コンポーネントを制御する制御部を含み、
前記制御部は、
インターフェース部への操作を検出可能な場合は、前記インターフェース部への操作に応じる第1制御状態で前記モータを制御し、前記インターフェース部への操作を検出不能な場合は、前記インターフェース部への操作に依らない第2制御状態で前記モータを制御し、
前記インターフェース部と通信可能、かつ、前記インターフェース部への操作の検出結果に異常が生じた場合、前記モータを前記第2制御状態で制御することが可能である、人力駆動車用制御装置。 - 前記インターフェース部は、1または複数の操作部を含む、請求項1に記載の人力駆動車用制御装置。
- 前記インターフェース部は、前記モータによるアシスト力の出力、および、前記人力駆動車に入力される人力駆動力に対する前記モータによるアシスト力の比率の少なくとも1つを変更させるための第1操作部を含む、請求項1または2に記載の人力駆動車用制御装置。
- 前記制御部は、前記インターフェース部が接続されていない場合、前記モータを前記第2制御状態で制御することが可能である、請求項1から3のいずれか一項に記載の人力駆動車用制御装置。
- 前記インターフェース部は、前記第1制御状態と前記第2制御状態とを切り替えるための第2操作部をさらに含み、
前記制御部は、前記インターフェース部への操作を検出可能な場合は、前記第2操作部の操作に応じて前記第1制御状態と前記第2制御状態とを切り替えることが可能である、請求項1から4のいずれか一項に記載の人力駆動車用制御装置。 - 前記制御部は、前記第2制御状態において前記モータによるアシスト力の出力、および、前記人力駆動車に入力される人力駆動力に対する前記モータによるアシスト力の比率の少なくとも1つを、前記人力駆動車の走行状態または走行環境に応じて制御する、請求項1から5のいずれか一項に記載の人力駆動車用制御装置。
- 前記制御部は、前記人力駆動車用コンポーネントが前記人力駆動車のクランク軸の回転と前記人力駆動車のホイールの回転との比率を変更するための変速機をさらに備える第1装備状態の場合の第1モードと、前記人力駆動車用コンポーネントが前記変速機を備えない第2装備状態の場合の第2モードとで動作可能に構成され、
前記第2装備状態の場合は、前記人力駆動車に前記変速機が搭載されていない場合、または、前記制御部に前記変速機が接続されていない場合を含み、
前記人力駆動車に前記変速機が搭載されていない場合は、手動変速機のみが前記人力駆動車に搭載されている場合を含む、請求項1から6のいずれか一項に記載の人力駆動車用制御装置。 - 前記制御部は、前記第1装備状態、かつ、前記インターフェース部への操作を検出可能な場合に前記インターフェース部への操作に応じる第3制御状態で前記変速機を制御する、請求項7に記載の人力駆動車用制御装置。
- 前記制御部は、前記第1装備状態、かつ、前記インターフェース部への操作を検出不能な場合に前記操作に依らない第4制御状態で前記変速機を制御する、請求項7または8に記載の人力駆動車用制御装置。
- 前記制御部は、前記第4制御状態において前記変速機を前記人力駆動車の走行状態または走行環境に応じて制御する、請求項9に記載の人力駆動車用制御装置。
- 前記インターフェース部は、前記変速機を動作させるための操作をする第3操作部をさらに含む、請求項7から10のいずれか一項に記載の人力駆動車用制御装置。
- 前記変速機は、前記モータとは各別に前記人力駆動車に装備可能に構成される、請求項7から11のいずれか一項に記載の人力駆動車用制御装置。
- 前記インターフェース部は、前記人力駆動車用コンポーネントに関する情報を表示する表示部を含み、
前記表示部は、前記第1装備状態かつ前記変速機を検出できない場合、または、前記第2装備状態の場合に、表示状態を変更する、請求項7に記載の人力駆動車用制御装置。 - 前記インターフェース部は、前記人力駆動車用コンポーネントに関する情報を表示する表示部を含む、請求項1から12のいずれか一項に記載の人力駆動車用制御装置。
- 前記人力駆動車用コンポーネントは、電動サスペンションをさらに含む、請求項1から14のいずれか一項に記載の人力駆動車用制御装置。
- 前記人力駆動車用コンポーネントは、電動アジャスタブルシートポストをさらに含む、請求項1から15のいずれか一項に記載の人力駆動車用制御装置。
- 前記制御部は、前記インターフェース部と有線または無線通信によって接続可能に構成される、請求項1から16のいずれか一項に記載の人力駆動車用制御装置。
- 前記制御部は、前記人力駆動車用コンポーネントと有線または無線通信によって接続可能に構成される、請求項1から17のいずれか一項に記載の人力駆動車用制御装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018083257A JP7066498B2 (ja) | 2018-04-24 | 2018-04-24 | 人力駆動車用制御装置 |
| DE102019109419.4A DE102019109419A1 (de) | 2018-04-24 | 2019-04-10 | Steuervorrichtung für ein vom Menschen angetriebenes Fahrzeug |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018083257A JP7066498B2 (ja) | 2018-04-24 | 2018-04-24 | 人力駆動車用制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019188995A JP2019188995A (ja) | 2019-10-31 |
| JP7066498B2 true JP7066498B2 (ja) | 2022-05-13 |
Family
ID=68105343
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018083257A Active JP7066498B2 (ja) | 2018-04-24 | 2018-04-24 | 人力駆動車用制御装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7066498B2 (ja) |
| DE (1) | DE102019109419A1 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102020209373A1 (de) | 2020-07-24 | 2022-01-27 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verfahren zur Steuerung einer Antriebsvorrichtung eines Fahrrads, Antriebsvorrichtung für ein Fahrrad und Fahrrad |
| US20220204126A1 (en) * | 2020-12-28 | 2022-06-30 | Shimano Inc. | Human-powered vehicle control device |
| DE102021211737B3 (de) | 2021-10-18 | 2023-02-09 | Zf Friedrichshafen Ag | Tretlagerantrieb, Fahrradtretlager, Elektrofahrrad sowie Verfahren zum Antrieb des Elektrofahrrades |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013512825A (ja) | 2009-12-04 | 2013-04-18 | マサチューセッツ インスティテュート オブ テクノロジー | ハイブリッドセンサ対応電動ホイールおよび関連システム、マルチハブホイールスポーク組みシステム、ならびにホイールスポークの製造および装着方法 |
| WO2016130833A1 (en) | 2015-02-13 | 2016-08-18 | Civilized Cycles Incorporated | Electric bicycle transmission systems, methods, and devices |
| JP2018502549A (ja) | 2014-11-24 | 2018-01-25 | スーパーペデストリアン インク | モータ付きホイールの装置および方法 |
| JP2018024411A (ja) | 2016-08-05 | 2018-02-15 | 株式会社シマノ | 自転車用制御装置、および、これを備える自転車用電動補助ユニット |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5143867B2 (ja) | 2010-06-11 | 2013-02-13 | 株式会社シマノ | 自転車用の電装品制御システム |
-
2018
- 2018-04-24 JP JP2018083257A patent/JP7066498B2/ja active Active
-
2019
- 2019-04-10 DE DE102019109419.4A patent/DE102019109419A1/de active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013512825A (ja) | 2009-12-04 | 2013-04-18 | マサチューセッツ インスティテュート オブ テクノロジー | ハイブリッドセンサ対応電動ホイールおよび関連システム、マルチハブホイールスポーク組みシステム、ならびにホイールスポークの製造および装着方法 |
| JP2018502549A (ja) | 2014-11-24 | 2018-01-25 | スーパーペデストリアン インク | モータ付きホイールの装置および方法 |
| WO2016130833A1 (en) | 2015-02-13 | 2016-08-18 | Civilized Cycles Incorporated | Electric bicycle transmission systems, methods, and devices |
| JP2018024411A (ja) | 2016-08-05 | 2018-02-15 | 株式会社シマノ | 自転車用制御装置、および、これを備える自転車用電動補助ユニット |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019188995A (ja) | 2019-10-31 |
| DE102019109419A1 (de) | 2019-10-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6927689B2 (ja) | 自転車用制御装置およびこれを含む自転車用制御システム | |
| CN110857134B (zh) | 人力驱动车的变速控制系统 | |
| JP2019172215A (ja) | 人力駆動車用制御装置 | |
| JP2019172226A (ja) | 人力駆動車用制御装置 | |
| JP7066498B2 (ja) | 人力駆動車用制御装置 | |
| TWI813650B (zh) | 人力驅動車輛用控制裝置 | |
| JP7564179B2 (ja) | 人力駆動車用制御装置および人力駆動車用ドライブユニット | |
| JP7277090B2 (ja) | 人力駆動車用制御装置 | |
| JP2019166911A (ja) | 人力駆動車両用制御装置 | |
| TWI831960B (zh) | 人力驅動車用之控制裝置 | |
| JP7317583B2 (ja) | 人力駆動車用の制御装置 | |
| JP2023087060A (ja) | 人力駆動車用の制御装置 | |
| JP7497214B2 (ja) | 制御装置および変速システム | |
| JP2020062997A (ja) | 人力駆動車用の制御装置および人力駆動車用の制御方法 | |
| JP7191646B2 (ja) | 人力駆動車用制御装置 | |
| JP2021187299A (ja) | 制御装置および変速システム | |
| JP7021031B2 (ja) | 人力駆動車用制御装置 | |
| JP7312867B2 (ja) | 人力駆動車用制御装置 | |
| CN112829872B (zh) | 人力驱动车用的判别装置及人力驱动车用的控制装置 | |
| JP7293417B2 (ja) | 人力駆動車用制御装置 | |
| JP2022013862A (ja) | 制御装置および変速システム | |
| JP2023146305A (ja) | 人力駆動車用の制御装置、および、人力駆動車用の報知装置の制御方法 | |
| JP2023079797A (ja) | 人力駆動車用の制御装置、人力駆動車用の制御システム、および、人力駆動車 | |
| CN117465594A (zh) | 人力驱动车用的控制装置 | |
| JP2019202734A (ja) | 人力駆動車用制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200416 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210129 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210202 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210402 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20210928 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211227 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20211227 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20220111 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20220118 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220405 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220427 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7066498 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |