JP7048832B1 - 車両制御装置、車両制御方法、およびプログラム - Google Patents
車両制御装置、車両制御方法、およびプログラム Download PDFInfo
- Publication number
- JP7048832B1 JP7048832B1 JP2021576463A JP2021576463A JP7048832B1 JP 7048832 B1 JP7048832 B1 JP 7048832B1 JP 2021576463 A JP2021576463 A JP 2021576463A JP 2021576463 A JP2021576463 A JP 2021576463A JP 7048832 B1 JP7048832 B1 JP 7048832B1
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- mode
- driving mode
- driving
- driver
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 42
- 230000008859 change Effects 0.000 claims abstract description 48
- 230000001133 acceleration Effects 0.000 claims abstract description 23
- 230000008569 process Effects 0.000 description 32
- 238000012545 processing Methods 0.000 description 19
- 238000004891 communication Methods 0.000 description 11
- 238000012544 monitoring process Methods 0.000 description 11
- 230000009471 action Effects 0.000 description 10
- 238000010586 diagram Methods 0.000 description 6
- 230000006870 function Effects 0.000 description 5
- 230000004044 response Effects 0.000 description 5
- 230000007547 defect Effects 0.000 description 4
- 238000001514 detection method Methods 0.000 description 4
- 238000002485 combustion reaction Methods 0.000 description 3
- 230000001276 controlling effect Effects 0.000 description 3
- 238000005070 sampling Methods 0.000 description 3
- 238000013473 artificial intelligence Methods 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 230000001052 transient effect Effects 0.000 description 2
- 230000003044 adaptive effect Effects 0.000 description 1
- 230000003542 behavioural effect Effects 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000001413 cellular effect Effects 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 230000036461 convulsion Effects 0.000 description 1
- 238000013135 deep learning Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 238000007499 fusion processing Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0059—Estimation of the risk associated with autonomous or manual driving, e.g. situation too complex, sensor failure or driver incapacity
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/082—Selecting or switching between different modes of propelling
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2555/00—Input parameters relating to exterior conditions, not covered by groups B60W2552/00, B60W2554/00
- B60W2555/60—Traffic rules, e.g. speed limits or right of way
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/40—High definition maps
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/20—Steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/10—Longitudinal speed
- B60W2720/106—Longitudinal acceleration
Abstract
Description
(1):この発明の一態様に係る車両制御装置は、車両の周辺の状況を認識する認識部と、前記車両の運転者の操作に依らずに前記車両の操舵および加減速を制御する運転制御部と、前記車両の運転モードを、第1の運転モードと、第2の運転モードとを含む複数の運転モードのいずれかに決定し、前記第2の運転モードは前記運転者に課されるタスクが前記第1の運転モードに比して軽度な運転モードであり、少なくとも前記第2の運転モードを含む前記複数の運転モードの一部は前記運転制御部により制御されるものであり、前記決定した運転モードに係るタスクが運転者により実行されない場合に、よりタスクが重度な運転モードに前記車両の運転モードを変更するモード決定部と、を備え、前記認識部は、前記車両が走行する経路の基準範囲内に存在する標識を認識し、前記モード決定部は、前記車両の運転モードが前記第2の運転モードである場合、前記認識部により認識された前記標識の数が第1基準値を超える場合に、前記第2の運転モードから前記第1の運転モードに前記車両の運転モードを変更する、車両制御装置である。
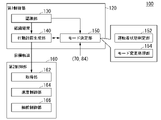
図1は、実施形態に係る車両制御装置を利用した車両システム1の構成図である。車両システム1が搭載される車両は、例えば、二輪や三輪、四輪等の車両であり、その駆動源は、ディーゼルエンジンやガソリンエンジンなどの内燃機関、電動機、或いはこれらの組み合わせである。電動機は、内燃機関に連結された発電機による発電電力、或いは二次電池や燃料電池の放電電力を使用して動作する。
[運転モードの制御]
以下、自車両Mの周辺の標識の数に応じた自車両Mの運転モードの制御について説明する。以下の説明においては、自車両MがモードAまたはBで走行している場合において、モードAまたはBでの走行を終了してモードCに変更する場合について説明する。
図6は、第1実施形態に係るモード決定部150により実行される処理の流れの一例を示すフローチャートである。本フローチャートの変更処理は、例えば、自動運転制御装置100が作動している間、繰り返し実行される。
第1実施形態におけるモード決定部150は、自車両MがモードAまたはBで走行しているときに、認識部130が認識した標識数に基づいて、自車両Mの運転モードをモードCに変更する。第2実施形態に係るモード決定部150は、認識部130が認識した標識数と、第2地図情報62に示された地図上の車線に設置された標識の数(以下、地図上標識数)との相違度合いが条件を満たすか否かによって判定し、相違度合いが条件を満たさない場合に、運転モードをモードCに変更するようにしてもよい。地図上標識数は、自車両Mの前方基準距離DFおよび後方基準距離DRの範囲内の第2地図情報62に示された標識の数である。地図上標識数は、モード決定部150が、MPU60から前方基準距離DFおよび後方基準距離DRの範囲内の第2地図情報62を取得し、取得した第2地図情報62に示された標識の数を計数してもよい。地図上標識数は、MPU60が、モード決定部150により出力された前方基準距離DFおよび後方基準距離DRの情報に基づいて第2地図情報62に示された標識の数を計数してもよいし、推奨車線決定部61が、推奨車線を決定する際に、ブロックごとに標識の数を計数してもよい。相違度合いの条件は、例えば、標識数と地図上標識数との差で定められたものである。標識数と地図上標識数との差は、固定値であってもよいし、標識数あるいは地図上標識数のいずれか一方を基準とし、基準とした一方に対して他方が多い場合と少ない場合とで異なる値にしたものであってもよい。例えば、標識数を基準とした場合、相違度合いの条件は、地図上標識数が多い場合の上限値と、地図上標識数が少ない場合の下限値とのそれぞれの値で定められてもよい。この場合、モード決定部150は、標識数と地図上標識数との差が上限値から下限値までの間であれば相違度合いの条件を満たすと判定し、地図上標識数が、標識数よりも上限値以上多い、あるいは標識数よりも下限値以上少ない場合に、相違度合いが条件を満たさないと判定する。地図上標識数を基準とした場合も、同様である。
図7は、第1実施形態に係るモード決定部150により実行される処理の流れの一例を示すフローチャートである。本フローチャートの変更処理も、第1実施形態の変更処理と同様に、例えば、自動運転制御装置100が作動している間、繰り返し実行される。本フローチャートには、第1実施形態の変更処理と同様の処理を含んでいる。従って、本フローチャートにおける第1実施形態の変更処理と同様の処理には、同一のステップ番号を付与し、同様の処理に関する再度の説明は省略する。
プログラムを記憶した記憶装置と、
ハードウェアプロセッサと、を備え、
前記ハードウェアプロセッサが前記記憶装置に記憶されたプログラムを実行することにより、
車両の周辺の状況を認識し、
前記車両の運転者の操作に依らずに前記車両の操舵および加減速を制御し、
前記車両の運転モードを、第1の運転モードと、第2の運転モードとを含む複数の運転モードのいずれかに決定し、前記第2の運転モードは前記運転者に課されるタスクが前記第1の運転モードに比して軽度な運転モードであり、少なくとも前記第2の運転モードを含む前記複数の運転モードの一部は前記車両の運転者の操作に依らずに前記車両の操舵および加減速を制御することで行われるものであり、
前記決定した運転モードに係るタスクが運転者により実行されない場合に、よりタスクが重度な運転モードに前記車両の運転モードを変更し、
前記認識する際に、前記車両が走行する経路の基準範囲内に存在する標識を認識し、
前記車両の運転モードが前記第2の運転モードである場合、前記認識された前記標識の数が第1基準値を超える場合に、前記第2の運転モードから前記第1の運転モードに前記車両の運転モードを変更する、
ように構成されている、車両制御装置。
10・・・カメラ
12・・・レーダ装置
14・・・LIDAR
16・・・物体認識装置
40・・・車両センサ
60・・・MPU
61・・・推奨車線決定部
62・・・第2地図情報
70・・・ドライバモニタカメラ
80・・・運転操作子
82・・・ステアリングホイール
84・・・ステアリング把持センサ
100・・・自動運転制御装置
120・・・第1制御部
130・・・認識部
140・・・行動計画生成部
150・・・モード決定部
152・・・運転者状態判定部
154・・・モード変更処理部
160・・・第2制御部
Claims (9)
- 車両の周辺の状況を認識する認識部と、
前記車両の運転者の操作に依らずに前記車両の操舵および加減速を制御する運転制御部と、
前記車両の運転モードを、第1の運転モードと、第2の運転モードとを含む複数の運転モードのいずれかに決定し、前記第2の運転モードは前記運転者に課されるタスクが前記第1の運転モードに比して軽度な運転モードであり、少なくとも前記第2の運転モードを含む前記複数の運転モードの一部は前記運転制御部により制御されるものであり、前記決定した運転モードに係るタスクが運転者により実行されない場合に、よりタスクが重度な運転モードに前記車両の運転モードを変更するモード決定部と、
を備え、
前記認識部は、前記車両が走行する経路の基準範囲内に存在する標識を認識し、
前記モード決定部は、前記車両の運転モードが前記第2の運転モードである場合、前記認識部により認識された前記標識の数が第1基準値を超える場合に、前記第2の運転モードから前記第1の運転モードに前記車両の運転モードを変更し、
前記認識部により認識された前記標識の数と、標識情報を含む地図情報に示された前記基準範囲の地図上の車線に設置された標識の数との相違度合いが条件を満たさない場合に、前記運転制御部における前記運転モードを前記第2の運転モードから前記第1の運転モードに変更する、
車両制御装置。 - 前記モード決定部は、前記標識の数の相違度合いが条件を満たさない場合、前記地図情報の取得部に新たな前記地図情報を取得させる、
請求項1に記載の車両制御装置。 - 車両の周辺の状況を認識する認識部と、
前記車両の運転者の操作に依らずに前記車両の操舵および加減速を制御する運転制御部と、
前記車両の運転モードを、第1の運転モードと、第2の運転モードとを含む複数の運転モードのいずれかに決定し、前記第2の運転モードは前記運転者に課されるタスクが前記第1の運転モードに比して軽度な運転モードであり、少なくとも前記第2の運転モードを含む前記複数の運転モードの一部は前記運転制御部により制御されるものであり、前記決定した運転モードに係るタスクが運転者により実行されない場合に、よりタスクが重度な運転モードに前記車両の運転モードを変更するモード決定部と、
を備え、
前記認識部は、前記車両が走行する経路の基準範囲内に存在する標識を認識し、
前記モード決定部は、前記車両の運転モードが前記第2の運転モードである場合、前記認識部により認識された前記標識の数が第1基準値を超える場合に、前記第2の運転モードから前記第1の運転モードに前記車両の運転モードを変更し、
少なくとも地図上の車線に設置された標識の位置の情報を含む地図情報が更新された場合に、第1基準値を更新する、
車両制御装置。 - 前記基準範囲は、前記車両から前方に向けて前方基準距離までの範囲と、前記車両から後方に向けて後方基準距離までの範囲とを含む、
請求項1に記載の車両制御装置。 - 前記前方基準距離は、前記後方基準距離よりも長い、
請求項4に記載の車両制御装置。 - 前記認識部は、前記経路の道路面よりも高い位置に設置された標識および/または前記道路面に描かれた標識を認識する、
請求項1に記載の車両制御装置。 - 前記第2の運転モードは、少なくとも、前記運転者による操舵操作を受け付ける操作子の把持が課されない運転モードであり、
前記第1の運転モードは、前記運転者により、前記車両の操舵と加減速との内、少なくとも一方の運転操作が必要な運転モード、あるいは、前記運転者による前記操作子の把持が課される運転モードである、
請求項1に記載の車両制御装置。 - 車両に搭載されたコンピュータが、
車両の周辺の状況を認識し、
前記車両の運転者の操作に依らずに前記車両の操舵および加減速を制御し、
前記車両の運転モードを、第1の運転モードと、第2の運転モードとを含む複数の運転モードのいずれかに決定し、前記第2の運転モードは前記運転者に課されるタスクが前記第1の運転モードに比して軽度な運転モードであり、少なくとも前記第2の運転モードを含む前記複数の運転モードの一部は前記車両の運転者の操作に依らずに前記車両の操舵および加減速を制御することで行われるものであり、
前記決定した運転モードに係るタスクが運転者により実行されない場合に、よりタスクが重度な運転モードに前記車両の運転モードを変更し、
前記認識する際に、前記車両が走行する経路の基準範囲内に存在する標識を認識し、
前記車両の運転モードが前記第2の運転モードである場合、前記認識された前記標識の数が第1基準値を超える場合に、前記第2の運転モードから前記第1の運転モードに前記車両の運転モードを変更し、
前記認識された前記標識の数と、標識情報を含む地図情報に示された前記基準範囲の地図上の車線に設置された標識の数との相違度合いが条件を満たさない場合に、前記運転モードを前記第2の運転モードから前記第1の運転モードに変更する、
車両制御方法。 - 車両に搭載されたコンピュータに、
車両の周辺の状況を認識させ、
前記車両の運転者の操作に依らずに前記車両の操舵および加減速を制御させ、
前記車両の運転モードを、第1の運転モードと、第2の運転モードとを含む複数の運転モードのいずれかに決定させ、前記第2の運転モードは前記運転者に課されるタスクが前記第1の運転モードに比して軽度な運転モードであり、少なくとも前記第2の運転モードを含む前記複数の運転モードの一部は前記車両の運転者の操作に依らずに前記車両の操舵および加減速を制御することで行われるものであり、
前記決定した運転モードに係るタスクが運転者により実行されない場合に、よりタスクが重度な運転モードに前記車両の運転モードを変更させ、
前記認識する際に、前記車両が走行する経路の基準範囲内に存在する標識を認識させ、
前記車両の運転モードが前記第2の運転モードである場合、前記認識させた前記標識の数が第1基準値を超える場合に、前記第2の運転モードから前記第1の運転モードに前記車両の運転モードを変更させ、
前記認識させた前記標識の数と、標識情報を含む地図情報に示された前記基準範囲の地図上の車線に設置された標識の数との相違度合いが条件を満たさない場合に、前記運転モードを前記第2の運転モードから前記第1の運転モードに変更させる、
プログラム。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2020/049098 WO2022144956A1 (ja) | 2020-12-28 | 2020-12-28 | 車両制御装置、車両制御方法、およびプログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP7048832B1 true JP7048832B1 (ja) | 2022-04-05 |
| JPWO2022144956A1 JPWO2022144956A1 (ja) | 2022-07-07 |
| JPWO2022144956A5 JPWO2022144956A5 (ja) | 2022-12-08 |
Family
ID=81259124
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021576463A Active JP7048832B1 (ja) | 2020-12-28 | 2020-12-28 | 車両制御装置、車両制御方法、およびプログラム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11958493B2 (ja) |
| JP (1) | JP7048832B1 (ja) |
| CN (1) | CN116323363A (ja) |
| DE (1) | DE112020007586T5 (ja) |
| WO (1) | WO2022144956A1 (ja) |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003168123A (ja) * | 2001-11-30 | 2003-06-13 | Toyota Central Res & Dev Lab Inc | 車線境界判定装置 |
| JP2013095330A (ja) * | 2011-11-02 | 2013-05-20 | Daimler Ag | 前方監視促進装置及び車両制御装置 |
| JP2015519642A (ja) * | 2012-04-26 | 2015-07-09 | コンティネンタル・テーベス・アクチエンゲゼルシヤフト・ウント・コンパニー・オッフェネ・ハンデルスゲゼルシヤフト | 車両周辺部を描写するための方法 |
| JP2017041038A (ja) * | 2015-08-19 | 2017-02-23 | アイシン・エィ・ダブリュ株式会社 | 経路探索システム、経路探索方法及びコンピュータプログラム |
| JP2017132290A (ja) * | 2016-01-25 | 2017-08-03 | 日立オートモティブシステムズ株式会社 | 自動運転制御装置および自動運転制御方法 |
| JP2018206358A (ja) * | 2017-05-31 | 2018-12-27 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカPanasonic Intellectual Property Corporation of America | 情報処理方法、情報処理装置、情報処理システムおよびプログラム |
| JP2020019455A (ja) * | 2018-08-03 | 2020-02-06 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| JP2020158008A (ja) * | 2019-03-27 | 2020-10-01 | 株式会社Subaru | 自動運転システム |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006275690A (ja) | 2005-03-29 | 2006-10-12 | Fujitsu Ten Ltd | 運転支援装置 |
| US9483059B2 (en) * | 2014-11-26 | 2016-11-01 | Toyota Motor Engineering & Manufacturing North America, Inc. | Method to gain driver's attention for autonomous vehicle |
| DE102016200513A1 (de) | 2016-01-18 | 2017-07-20 | Ford Global Technologies, Llc | Verfahren und Vorrichtung zum Betreiben eines Kraftfahrzeuges |
| DE102017203654A1 (de) | 2017-03-07 | 2018-09-13 | Volkswagen Aktiengesellschaft | Verfahren zum Betreiben eines Fahrerassistenzsystems für ein Fahrzeug auf einer Straße und Fahrerassistenzsystem |
| JP6925713B2 (ja) | 2017-05-11 | 2021-08-25 | アルパイン株式会社 | 自動運転可否通知システム |
| EP3410414A1 (en) | 2017-05-31 | 2018-12-05 | Panasonic Intellectual Property Corporation of America | Information processing method, information processing apparatus, system, and storage medium |
| JP7115270B2 (ja) | 2018-12-07 | 2022-08-09 | トヨタ自動車株式会社 | 自動運転システム |
| CN109783588A (zh) * | 2018-12-10 | 2019-05-21 | 北京百度网讯科技有限公司 | 地图的错误信息检测方法、装置、设备、车辆及存储介质 |
| US11144053B2 (en) * | 2019-04-04 | 2021-10-12 | Toyota Research Institute, Inc. | Controlling driving condition components of an autonomous vehicle based on a current driving mode and current conditions |
| US20200319635A1 (en) * | 2019-04-04 | 2020-10-08 | International Business Machines Corporation | Semi-autonomous vehicle driving system, and method of operating semi-autonomous vehicle |
| US20220185266A1 (en) * | 2020-12-10 | 2022-06-16 | Zoox, Inc. | Velocity-based relevance filter |
-
2020
- 2020-12-28 DE DE112020007586.9T patent/DE112020007586T5/de active Pending
- 2020-12-28 JP JP2021576463A patent/JP7048832B1/ja active Active
- 2020-12-28 CN CN202080106055.4A patent/CN116323363A/zh active Pending
- 2020-12-28 WO PCT/JP2020/049098 patent/WO2022144956A1/ja active Application Filing
- 2020-12-28 US US18/036,419 patent/US11958493B2/en active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003168123A (ja) * | 2001-11-30 | 2003-06-13 | Toyota Central Res & Dev Lab Inc | 車線境界判定装置 |
| JP2013095330A (ja) * | 2011-11-02 | 2013-05-20 | Daimler Ag | 前方監視促進装置及び車両制御装置 |
| JP2015519642A (ja) * | 2012-04-26 | 2015-07-09 | コンティネンタル・テーベス・アクチエンゲゼルシヤフト・ウント・コンパニー・オッフェネ・ハンデルスゲゼルシヤフト | 車両周辺部を描写するための方法 |
| JP2017041038A (ja) * | 2015-08-19 | 2017-02-23 | アイシン・エィ・ダブリュ株式会社 | 経路探索システム、経路探索方法及びコンピュータプログラム |
| JP2017132290A (ja) * | 2016-01-25 | 2017-08-03 | 日立オートモティブシステムズ株式会社 | 自動運転制御装置および自動運転制御方法 |
| JP2018206358A (ja) * | 2017-05-31 | 2018-12-27 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカPanasonic Intellectual Property Corporation of America | 情報処理方法、情報処理装置、情報処理システムおよびプログラム |
| JP2020019455A (ja) * | 2018-08-03 | 2020-02-06 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| JP2020158008A (ja) * | 2019-03-27 | 2020-10-01 | 株式会社Subaru | 自動運転システム |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2022144956A1 (ja) | 2022-07-07 |
| JPWO2022144956A1 (ja) | 2022-07-07 |
| US11958493B2 (en) | 2024-04-16 |
| CN116323363A (zh) | 2023-06-23 |
| US20230322246A1 (en) | 2023-10-12 |
| DE112020007586T5 (de) | 2023-06-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110254427B (zh) | 车辆控制装置、车辆控制方法以及存储介质 | |
| JP6942236B1 (ja) | 車両制御装置、車両制御方法、およびプログラム | |
| CN110949376A (zh) | 车辆控制装置、车辆控制方法及存储介质 | |
| US11827246B2 (en) | Vehicle control device, vehicle control method, and storage medium | |
| CN112462751A (zh) | 车辆控制装置、车辆控制方法及存储介质 | |
| JP2022096236A (ja) | 車両制御装置、車両制御方法、及びプログラム | |
| JP7470157B2 (ja) | 車両制御装置、車両制御方法、およびプログラム | |
| JP2023030147A (ja) | 車両制御装置、車両制御方法、およびプログラム | |
| JP7308880B2 (ja) | 車両制御装置、車両制御方法、およびプログラム | |
| JP7092955B1 (ja) | 車両制御装置、車両制御方法、およびプログラム | |
| JP7046289B1 (ja) | 車両制御装置、車両システム、車両制御方法、およびプログラム | |
| CN115140083A (zh) | 车辆控制装置、车辆控制方法及存储介质 | |
| JP7048832B1 (ja) | 車両制御装置、車両制御方法、およびプログラム | |
| JP2022103645A (ja) | 車両制御装置、車両制御方法、およびプログラム | |
| WO2022144950A1 (ja) | 車両制御装置、車両制御方法、およびプログラム | |
| JP7075550B1 (ja) | 車両制御装置、車両制御方法、およびプログラム | |
| WO2022144974A1 (ja) | 車両制御装置、車両制御方法、及びプログラム | |
| WO2022144976A1 (ja) | 車両制御装置、車両制御方法、およびプログラム | |
| US20230303126A1 (en) | Vehicle control device, vehicle control method, and storage medium | |
| JP7186210B2 (ja) | 車両制御装置、車両制御方法、およびプログラム | |
| WO2022144958A1 (ja) | 車両制御装置、車両制御方法、およびプログラム | |
| US20220315050A1 (en) | Vehicle control device, route generation device, vehicle control method, route generation method, and storage medium | |
| WO2022144954A1 (ja) | 車両制御装置、車両制御方法、およびプログラム | |
| WO2022144970A1 (ja) | 車両制御装置、車両制御方法、およびプログラム | |
| JP2022103474A (ja) | 車両制御装置、車両制御方法、およびプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211222 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20211222 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20211222 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220308 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220324 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7048832 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |