(第1実施形態)
以下、第1実施形態について説明する。図1に示すように、膨張弁5は、電気式膨張弁であり、車両用空調装置の蒸気圧縮式の冷凍サイクル1に適用されている。冷凍サイクル1は、冷媒としてフロン系冷媒(R134a)を採用しており、高圧冷媒の圧力が冷媒の臨界圧力を超えない亜臨界サイクルを構成している。まず、冷凍サイクル1の圧縮機2は図示しない車両走行用エンジンから電磁クラッチ等を介して駆動力を得て、冷媒を吸入して圧縮するものである。なお、圧縮機2は、図示しない電動モータから出力される駆動力によって駆動する電動圧縮機で構成されていてもよい。
凝縮器3は、圧縮機2から吐出された高圧冷媒と図示しない冷却ファンにより送風される外気(すなわち、車室外の空気)とを熱交換させて、高圧冷媒を放熱させて凝縮させる放熱用熱交換器である。
凝縮器3の出口側には、凝縮器3から流出した高圧冷媒を気相冷媒と液相冷媒とに分離して、サイクル内の余剰液相冷媒を溜めるレシーバ4が接続されている。さらに、レシーバ4の液相冷媒出口には、膨張弁5が接続されている。膨張弁5は、車室内と車室外を仕切るファイアウォールの車室側に配置されている。
この膨張弁5は、レシーバ4から流出した高圧冷媒を減圧膨張させる弁装置である。膨張弁5は、蒸発器6から流出した低圧冷媒の温度と圧力とに基づいて、蒸発器6から流出した低圧冷媒の過熱度が予め定めた値に近づくように絞り通路面積(すなわち、弁開度)を変化させて、蒸発器6の冷媒流入口側へ流出させる冷媒流量を調整する。膨張弁5の詳細については後述する。温度と圧力は、物理量である。
蒸発器6は、車両のダッシュボード内等に配置された空調ケーシング7内に配置される。蒸発器は、膨張弁5にて減圧膨張された低圧冷媒と、送風機8によって付勢されて空調ケーシング7内を流れる空気とを、熱交換させる。この熱交換により、当該空気が冷却されると共に低圧冷媒が蒸発する。冷却された空気は、送風機8によって車室内に送られる。
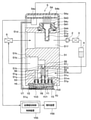
次に、膨張弁5の詳細構成について説明する。膨張弁5は、図2に示すように、空調ケーシング7の外側から、空調ケーシングに固定されている。蒸発器6の出口側は、膨張弁5の内部に形成された蒸発後冷媒通路51fを介して、圧縮機2の吸入側に接続されている。
膨張弁5は、図2、図3に示すように、ボディ51、弁体52、コイルバネ53、自律部54、バルブモジュールY0等を有する。まず、ボディ51は、膨張弁5の外殻および膨張弁5内の冷媒通路等を構成するもので、円筒状あるいは角筒状の金属ブロックに穴開け加工等を施して形成されている。ボディ51には、第1流入口51a、第1流出口51b、第2流入口51d、第2流入口51d、第2流出口51e、弁室51g、絞り通路51h等が形成されている。
冷媒流入口・流出口としては、凝縮器3の出口に接続されて高圧液相冷媒を流入させる第1流入口51a、第1流入口51aから流入した冷媒を蒸発器6入口側へ流出させる第1流出口51bが形成されている。従って、本実施形態では、第1流入口51aから第1流出口51bへ至る冷媒通路によって、高圧冷媒通路51cが形成される。高圧冷媒通路51cは、第1通路に対応する。
また、他の冷媒流入口・流出口として、蒸発器6から流出した低圧冷媒を流入させる第2流入口51d、第2流入口51dから流入した冷媒を圧縮機2吸入側へ流出させる第2流出口51eが形成されている。従って、本実施形態では、第2流入口51dから第2流出口51eへ至る冷媒通路によって、蒸発後冷媒通路51fが形成される。
弁室51gは、高圧冷媒通路51cに設けられて、その内部に後述する弁体52が収容される空間である。弁室51gは圧力室に対応する。より具体的には、弁室51gは、第1流入口51aに直接連通し、絞り通路51hを介して第1流出口51bに連通している。絞り通路51hは、高圧冷媒通路51cに設けられて、第1流入口51aから弁室51gへ流入した冷媒を、減圧膨張させながら弁室51g側から第1流出口51b側へ導く通路である。絞り通路51hは、弁体52と弁座51jとの間に形成される。
弁座51jは、弁室51gの下流端において冷媒流路を狭めるようにボディ51に形成されている。弁体52は、弁座51jに対して変位することによって、絞り通路51hの冷媒通路面積を連続的にまたは3段階以上の複数段階で調整する弁体である。絞り通路51hはら第1流出口51bへ至る冷媒通路は、低圧冷媒通路51kである。低圧冷媒通路51kは、第2通路に対応する。
低圧冷媒通路51kには、低圧導入路51qが接続されている。この低圧導入路51qは、ボディ51に形成され、一端が低圧冷媒通路51kに連通し、他端がバルブモジュールY0の第3連通孔YV3に連通する。
また、高圧冷媒通路51cには、高圧導入路51pが接続されている。この高圧導入路51pは、ボディ51に形成され、一端が高圧冷媒通路51cに連通し、他端がバルブモジュールY0の第2連通孔YV2に連通する。
コイルバネ53は、弁室51gに収容され、弁体52に対して絞り通路51hを閉弁させる側に付勢している。具体的には、コイルバネ53は、弁室51gのうち背圧室51mに配置される。背圧室51mは、弁体52を基準として絞り通路51hとは反対側に形成される。背圧室51mには、バルブモジュールY0の第1連通孔YV1に連通する。以下、弁室51gのうち、弁体52を基準として背圧室51mとは反対側の空間を前側室51sという。弁室51gは、弁体52によって、背圧室51mと前側室51sに仕切られる。
自律部54は、ケーシング54a、回路基板54b、複合センサ54c、ドライバ回路54dを含む。ケーシング54aは、ボディ51に固定され、回路基板54b、複合センサ54c、ドライバ回路54dが収容された収容空間を囲む樹脂製の部材である。ボディ51のうち、蒸発後冷媒通路51fを囲んでいる壁には、この収容空間に対して開く開口51rが形成されている。回路基板54bは、ケーシング54aに固定され、複合センサ54c、ドライバ回路54d等が実装されている。
複合センサ54cは、ケーシング541と、感応部542と、リード部543と、Oリング544を有している。樹脂製のケーシング541は、ケーシング54aに囲まれた収容空間において、ボディ51に一体に固定されている。より具体的には、ケーシング541は、ボディ51に開けられた開口51rに挿通された状態となっている。したがって、ケーシング541は、蒸発後冷媒通路51f内にある部分と、上記収容空間内にある部分とを有する。
Oリング544は、ケーシング541とボディ51の間に介在して、蒸発後冷媒通路51fからケーシング54a内部への冷媒の漏出を抑制する。導電性のリード部543は、回路基板54bにプリントされた配線に接続されている。複合センサ54cは、空隙を介して回路基板54bに対向しているので、リード部543の配策が容易である。
感応部542は、ケーシング541のうち蒸発後冷媒通路51f内にある部分に固定される。感応部542は、蒸発後冷媒通路51fにおける冷媒の圧力に応じた圧力信号と、蒸発後冷媒通路51fにおける冷媒の温度に応じた温度信号とを、出力する。
感応部542は、例えば、圧力センサと、当該圧力センサとは別体の温度センサとを備えていてもよい。あるいは、感応部542は、4つのゲージ抵抗と、当該ブリッジ回路が取り付けられた薄肉状のダイヤフラムとを有していてもよい。各ゲージ抵抗は、ダイヤフラムの上に形成された薄膜抵抗として構成されていてもよい。
各ゲージ抵抗は、ダイヤフラムの歪みに応じて抵抗値が変化する抵抗素子である。また、各ゲージ抵抗は、温度に応じて抵抗値が変化する素子である。これらゲージ抵抗は、ホイートストンブリッジ回路を構成するように互いに電気的に接続されている。ホイートストンブリッジ回路には、ドライバ回路54dから、回路基板54b、リード部543、不図示の配線を介して、定電流が供給される。これにより、各ゲージ抵抗のピエゾ抵抗効果により、ダイヤフラムの歪みに応じた圧力信号やダイヤフラムの温度に応じた温度信号が、感応部542から出力される。
具体的には、感応部542は、ダイヤフラムの歪みに応じた複数のゲージ抵抗の抵抗変化をホイートストンブリッジ回路の中点電圧の変化として検出し、当該中点電圧を圧力信号として出力する。一方、感応部542は、感応部542の温度に応じた複数のゲージ抵抗の抵抗変化をホイートストンブリッジ回路のブリッジ電圧として検出し、当該ブリッジ電圧を温度信号として出力する。
感応部542から出力された圧力信号と温度信号は、不図示の配線およびそれに導通するリード部543を介して感応部542から回路基板54bに伝達される。回路基板54bに伝達された圧力信号と温度信号は、回路基板54bにプリントされたパターンを介してドライバ回路54dに入力される。
ドライバ回路54dは、複合センサ54cから回路基板54bを介して入力された圧力信号と温度信号に基づいて、バルブモジュールY0の作動を制御する。ドライバ回路54dは、例えば、マイクロコンピュータによって実現することが可能であり、あるいは、専用の回路構成を有するハードウェアによって実現することも可能である。
[バルブモジュールY0の構成]
ここで、バルブモジュールY0の構成について、図3、図4、図5、図6、図7、図8を用いて説明する。図3、図4に示すように、バルブモジュールY0は、マイクロバルブY1、バルブケーシングY2、封止部材Y3、3つのOリングY4、Y5a、Y5b、2本の電気配線Y6、Y7、変換プレートY8を有している。
マイクロバルブY1は、板形状の制御弁部品であり、主として半導体チップによって構成されている。マイクロバルブY1は、半導体チップ以外の部品を有していてもいなくてもよい。したがって、マイクロバルブY1を小型に構成できる。マイクロバルブY1の厚さ方向の長さは例えば2mmであり、厚さ方向に直交する長手方向の長さは例えば10mmであり、長手方向にも厚さ方向にも直交する短手方向の長さは例えば5mmであるが、これに限定されない。マイクロバルブY1への供給電力が変動することで、マイクロバルブY1の流路構成が変化する。マイクロバルブY1は、パイロット弁として機能する。
電気配線Y6、Y7は、マイクロバルブY1の表裏にある2つの板面のうち、バルブケーシングY2とは反対側の面から伸びて、封止部材Y3、バルブケーシングY2内を通過して、バルブモジュールY0の外部にある電源(すなわちドライバ回路54d)に接続される。電気配線Y6、Y7のマイクロバルブY1側とは反対側の端部は、ドライバ回路54dに接続される。これにより、電気配線Y6、Y7を通して、ドライバ回路54dからマイクロバルブY1に電力が供給可能となる。
変換プレートY8は、マイクロバルブY1とバルブケーシングY2の間に配置される板形状の部材である。変換プレートY8は、ガラス基板である。変換プレートY8の表裏にある2つの板面の一方側は、マイクロバルブY1に対して接着剤で固定され、他方側はバルブケーシングY2に対して接着剤で固定されている。変換プレートY8には、マイクロバルブY1の後述する3つの冷媒孔Y16、Y17、Y18とバルブケーシングY2の3つの連通孔YV1、YV2、YV3とを繋げるための流路Y81、Y82、Y83が形成されている。これら流路Y81、Y82、Y83は、一列に並ぶ上記3つの冷媒孔Y16、Y17、Y18間のピッチと、一列に並ぶ上記3つの連通孔YV1、YV2、YV3間のピッチとの違いを、吸収するための流路である。連通孔YV1、YV2、YV3間のピッチは冷媒孔Y16、Y17、Y18間のピッチよりも大きい。流路Y81、Y82、Y83は、変換プレートY8の表裏にある2つの板面の一方から他方に貫通している。したがって、流路Y81、Y82、Y83の連通孔YV1、YV2、YV3側の端部の間のピッチは、流路Y81、Y82、Y83の上記冷媒孔Y16、Y17、Y18側の端部の間のピッチよりも、大きい。
バルブケーシングY2は、マイクロバルブY1および変換プレートY8を収容する樹脂製のケーシングである。バルブケーシングY2は、ポリフェニレンサルファイドを主成分として樹脂成型によって形成されている。バルブケーシングY2は、一方側に底壁を有し、他方側が開放された箱体である。バルブケーシングY2の底壁は、マイクロバルブY1および変換プレートY8がボディ51に直接接しないように、ボディ51とマイクロバルブY1の間に介在する。そして、この底壁の一方側の面がボディ51に接触して固定され、他方側の面が変換プレートY8に接触して固定される。
このようになっていることで、マイクロバルブY1とボディ51の線膨張係数の違いをバルブケーシングY2が吸収できる。これは、バルブケーシングY2の線膨張係数が、マイクロバルブY1の線膨張係数とボディ51の線膨張係数の間の値となっているからである。なお、変換プレートY8の線膨張係数は、マイクロバルブY1の線膨張係数とバルブケーシングY2の線膨張係数の間の値となっている。
また、バルブケーシングY2の底壁は、マイクロバルブY1に対向する板形状のベース部Y20と、マイクロバルブY1から離れる方向に当該ベース部Y20から突出する柱形状の第1突出部Y21、第2突出部Y22、第3突出部Y23を有する。
第1突出部Y21、第2突出部Y22、第3突出部Y23は、ボディ51に形成された凹みに嵌め込まれている。第1突出部Y21には、マイクロバルブY1側端からその反対側端まで貫通する第1連通孔YV1が形成されている。第2突出部Y22には、マイクロバルブY1側端からその反対側端まで貫通する第2連通孔YV2が形成されている。第3突出部Y23には、マイクロバルブY1側端からその反対側端まで貫通する第3連通孔YV3が形成されている。第1連通孔YV1、第2連通孔YV2、第3連通孔YV3は一列に並んでおり、第2連通孔YV2と第3連通孔YV3の間に第1連通孔YV1が位置する。
第1連通孔YV1のマイクロバルブY1側端は、変換プレートY8に形成された流路Y81のバルブケーシングY2側端に連通している。第2連通孔YV2のマイクロバルブY1側端は、変換プレートY8に形成された流路Y82のバルブケーシングY2側端に連通している。第3連通孔YV3のマイクロバルブY1側端は、変換プレートY8に形成された流路Y83のバルブケーシングY2側端に連通している。
封止部材Y3は、バルブケーシングY2の開放された上記他方側を封止するエポキシ樹脂製の部材である。封止部材Y3は、マイクロバルブY1の表裏にある2つの板面のうち、変換プレートY8側とは反対側の板面の全体を覆う。また、封止部材Y3は、変換プレートY8の表裏にある2つの板面のうち、バルブケーシングY2の底壁側とは反対側の板面の一部を覆う。また、封止部材Y3は、電気配線Y6、Y7を覆うことで、電気配線Y6、Y7の防水および絶縁を実現する。封止部材Y3は樹脂ポッティング等によって形成される。
OリングY4は、第1突出部Y21の外周に取り付けられ、ボディ51と第1突出部Y21の間を封止することで、膨張弁5の外部かつ冷凍サイクルの外部への冷媒の漏出を抑制する。OリングY5aは、第2突出部Y22の外周に取り付けられ、ボディ51と第2突出部Y22の間を封止することで、膨張弁5の外部かつ冷凍サイクルの外部への冷媒の漏出を抑制する。OリングY5bは、第3突出部Y23の外周に取り付けられ、ボディ51と第3突出部Y23の間を封止することで、膨張弁5の外部かつ冷凍サイクルの外部への冷媒の漏出を抑制する。
ここで、マイクロバルブY1の構成について更に説明する。マイクロバルブY1は、図5、図6に示すように、いずれも半導体である第1外層Y11、中間層Y12、第2外層Y13を備えたMEMSである。MEMSは、Micro Electro Mechanical Systemsの略称である。第1外層Y11、中間層Y12、第2外層Y13は、それぞれが同じ外形を有する長方形の板形状の部材であり、第1外層Y11、中間層Y12、第2外層Y13の順に積層されている。すなわち、中間層Y12が、第1外層Y11と第2外層Y13に両側から挟まれている。第1外層Y11、中間層Y12、第2外層Y13のうち、第2外層Y13が、バルブケーシングY2の底壁に最も近い側に配置される。後述する第1外層Y11、中間層Y12、第2外層Y13の構造は、化学的エッチング等の半導体製造プロセスによって形成される。
第1外層Y11は、表面に非導電性の酸化膜のある導電性の半導体部材である。第1外層Y11には、図5に示すように、表裏に貫通する2つの貫通孔Y14、Y15が形成されている。この貫通孔Y14、Y15に、それぞれ、電気配線Y6、Y7のマイクロバルブY1側端が挿入される。
第2外層Y13は、表面に非導電性の酸化膜のある導電性の半導体部材である。第2外層Y13には、図5、図7、図8に示すように、表裏に貫通する第1冷媒孔Y16、第2冷媒孔Y17、第3冷媒孔Y18が形成されている。
図8に示すように、第1冷媒孔Y16、第2冷媒孔Y17、第3冷媒孔Y18は、それぞれ、変換プレートY8の流路Y81、Y82、Y83に連通する。第1冷媒孔Y16、第2冷媒孔Y17、第3冷媒孔Y18は、一列に並んでいる。第2冷媒孔Y17と第3冷媒孔Y18の間に第1冷媒孔Y16が配置される。第1冷媒孔Y16、第2冷媒孔Y17、第3冷媒孔Y18の各々の水力直径は、例えば0.1mm以上かつ3mm以下であるが、これに限定されない。
中間層Y12は、導電性の半導体部材であり、第1外層Y11と第2外層Y13に挟まれている。中間層Y12は、第1外層Y11の酸化膜と第2外層Y13の酸化膜に接触するので、第1外層Y11と第2外層Y13とも電気的に非導通である。中間層Y12は、図7に示すように、第1固定部Y121、第2固定部Y122、複数本の第1リブY123、複数本の第2リブY124、スパインY125、アームY126、梁Y127、可動部Y128を有している。
第1固定部Y121は、第1外層Y11、第2外層Y13に対して固定された部材である。第1固定部Y121は、第2固定部Y122、第1リブY123、第2リブY124、スパインY125、アームY126、梁Y127、可動部Y128を同じ1つの冷媒室Y19内に囲むように形成されている。冷媒室Y19は、第1固定部Y121、第1外層Y11、第2外層Y13によって囲まれた室である。第1固定部Y121、第1外層Y11、第2外層Y13は、全体として基部に対応する。なお、電気配線Y6、Y7は複数の第1リブY123および複数の第2リブY124の温度を変化させて変位させるための電気配線である。
第1固定部Y121の第1外層Y11および第2外層Y13に対する固定は、冷媒がこの冷媒室Y19から第1冷媒孔Y16、第2冷媒孔Y17、第3冷媒孔Y18以外を通ってマイクロバルブY1から漏出することを抑制するような形態で、行われている。
第2固定部Y122は、第1外層Y11、第2外層Y13に対して固定される。第2固定部Y122は、第1固定部Y121に取り囲まれると共に、第1固定部Y121から離れて配置される。
複数本の第1リブY123、複数本の第2リブY124、スパインY125、アームY126、梁Y127、可動部Y128は、第1外層Y11、第2外層Y13に対して固定されておらず、第1外層Y11、第2外層Y13に対して変位可能である。
スパインY125は、中間層Y12の矩形形状の短手方向に伸びる細長い棒形状を有している。スパインY125の長手方向の一端は、梁Y127に接続されている。
複数本の第1リブY123は、スパインY125の長手方向に直交する方向におけるスパインY125の一方側に配置される。そして、複数本の第1リブY123は、スパインY125の長手方向に並んでいる。各第1リブY123は、細長い棒形状を有しており、温度に応じて伸縮可能となっている。
各第1リブY123は、その長手方向の一端で第1固定部Y121に接続され、他端でスパインY125に接続される。そして、各第1リブY123は、第1固定部Y121側からスパインY125側に近付くほど、スパインY125の長手方向の梁Y127側に向けてオフセットされるよう、スパインY125に対して斜行している。そして、複数の第1リブY123は、互いに対して平行に伸びている。
複数本の第2リブY124は、スパインY125の長手方向に直交する方向におけるスパインY125の他方側に配置される。そして、複数本の第2リブY124は、スパインY125の長手方向に並んでいる。各第2リブY124は、細長い棒形状を有しており、温度に応じて伸縮可能となっている。
各第2リブY124は、その長手方向の一端で第2固定部Y122に接続され、他端でスパインY125に接続される。そして、各第2リブY124は、第2固定部Y122側からスパインY125側に近付くほど、スパインY125の長手方向の梁Y127側に向けてオフセットされるよう、スパインY125に対して斜行している。そして、複数の第2リブY124は、互いに対して平行に伸びている。
複数本の第1リブY123、複数本の第2リブY124、スパインY125は、全体として、駆動部に対応する。
アームY126は、スパインY125と非直交かつ平行に伸びる細長い棒形状を有している。アームY126の長手方向の一端は梁Y127に接続されており、他端は第1固定部Y121に接続されている。
梁Y127は、スパインY125およびアームY126に対して約90°で交差する方向に伸びる細長い棒形状を有している。梁Y127の一端は、可動部Y128に接続されている。アームY126と梁Y127は、全体として、増幅部に対応する。
アームY126と梁Y127の接続位置YP1、スパインY125と梁Y127の接続位置YP2、梁Y127と可動部Y128の接続位置YP3は、梁Y127の長手方向に沿って、この順に並んでいる。そして、第1固定部Y121とアームY126との接続点をヒンジYP0とすると、中間層Y12の板面に平行な面内におけるヒンジYP0から接続位置YP2までの直線距離よりも、ヒンジYP0から接続位置YP3までの直線距離の方が、長い。例えば、前者の直線距離を後者の直線距離で除算した値は、1/5以下であってもよいし、1/10以下であってもよい。
可動部Y128は、その外形が、梁Y127の長手方向に対して概ね90°の方向に伸びる矩形形状を有している。この可動部Y128は、冷媒室Y19内において梁Y127と一体に動くことができる。そして、可動部Y128は、中間層Y12の表裏に貫通する貫通孔Y120を囲む枠形状となっている。したがって、貫通孔Y120も、可動部Y128と一体的に移動する。貫通孔Y120は、冷媒室Y19の一部である。
可動部Y128は、上記のように動くことで、第2冷媒孔Y17の貫通孔Y120に対する開度および、第3冷媒孔Y18の貫通孔Y120に対する開度を変更する。第1冷媒孔Y16は、貫通孔Y120に対して常に全開で連通している。
また、第1固定部Y121のうち、複数の第1リブY123と接続する部分の近傍の第1印加点Y129には、図5に示した第1外層Y11の貫通孔Y14を通った電気配線Y6のマイクロバルブY1側端が接続される。また、第2固定部Y122の第2印加点Y130には、図5に示した第1外層Y11の貫通孔Y15を通った電気配線Y7のマイクロバルブY1側端が接続される。
[バルブモジュールY0の作動]
ここで、バルブモジュールY0の作動について説明する。マイクロバルブY1への通電が開始されると、電気配線Y6、Y7から第1印加点Y129、第2印加点Y130の間に電圧が印加される。すると、複数の第1リブY123、複数の第2リブY124を電流が流れる。この電流によって、複数の第1リブY123、複数の第2リブY124が発熱する。その結果、複数の第1リブY123、複数の第2リブY124の各々が、その長手方向に膨張する。
このような熱的な膨張の結果、複数の第1リブY123、複数の第2リブY124は、スパインY125を接続位置YP2側に付勢する。付勢されたスパインY125は、接続位置YP2において、梁Y127を押す。このように、接続位置YP2は付勢位置に対応する。その結果、梁Y127とアームY126から成る部材は、ヒンジYP0を支点として、接続位置YP2を力点として、一体に姿勢を変える。その結果、梁Y127のアームY126とは反対側の端部に接続された可動部Y128も、その長手方向の、スパインY125が梁Y127を押す側に、移動する。
また、マイクロバルブY1への通電が停止されたときは、電気配線Y6、Y7から第1印加点Y129、第2印加点Y130への電圧印加が停止される。すると、複数の第1リブY123、複数の第2リブY124を電流が流れなくなり、複数の第1リブY123、複数の第2リブY124の温度が低下する。その結果、複数の第1リブY123、複数の第2リブY124の各々が、その長手方向に収縮する。
このような熱的な収縮の結果、複数の第1リブY123、複数の第2リブY124は、スパインY125を接続位置YP2とは反対側に付勢する。付勢されたスパインY125は、接続位置YP2において、梁Y127を引っ張る。その結果、梁Y127とアームY126から成る部材は、ヒンジYP0を支点として、接続位置YP2を力点として、一体に姿勢を変える。その結果、梁Y127のアームY126とは反対側の端部に接続された可動部Y128も、その長手方向の、スパインY125が梁Y127を引っ張る側に、移動する。その移動の結果、可動部Y128は、所定の非通電時位置で停止する。非通電時位置は、第1位置に対応する。
このようなマイクロバルブY1への通電時、電気配線Y6、Y7から第1印加点Y129、第2印加点Y130を介してマイクロバルブY1に供給される電力が大きいほど、非通電時位置に対する可動部Y128の移動量も大きくなる。これは、マイクロバルブY1に供給される電力が高いほど、第1リブY123、第2リブY124の温度が高くなり、膨張度合いが大きいからである。
例えば電気配線Y6、Y7から第1印加点Y129、第2印加点Y130へ印加される電圧がPWM制御される場合、電圧のデューティ比が大きいほど非通電時に対する可動部Y128の移動量も大きくなる。以下、PWM制御における電圧のデューティ比を、単にデューティ比という。
図7、図8に示すように、可動部Y128が非通電時位置にある場合、貫通孔Y120は、中間層Y12の板面に直交する方向に第1冷媒孔Y16、第3冷媒孔Y18と重なるが、当該方向に第2冷媒孔Y17とは重ならない。第2冷媒孔Y17は、中間層Y12の板面に直交する方向に可動部Y128と重なる。つまりこのとき、貫通孔Y120に対して第1冷媒孔Y16、第3冷媒孔Y18は全開になり、第2冷媒孔Y17は全閉になる。したがってこの場合、第1冷媒孔Y16が第3冷媒孔Y18に可動部Y128を介して連通し、第2冷媒孔Y17は第1冷媒孔Y16とも第3冷媒孔Y18とも遮断される。この結果、第1連通孔YV1と第3連通孔YV3との間で、流路Y81、第1冷媒孔Y16、貫通孔Y120、第3冷媒孔Y18、流路Y83を介した、冷媒の流通が可能となる。
また、図9、図10に示すように、マイクロバルブY1への通電によって可動部Y128が非通電時位置から最も遠ざかった位置にある場合、そのときの可動部Y128の位置を最大通電時位置という。最大通電時位置は第2位置に対応する。可動部Y128が最大通電時位置にある場合は、マイクロバルブY1へ供給される電力が制御範囲内の最大となる。例えば、可動部Y128が最大通電時位置にある場合、上述のPWM制御においてデューティ比が制御範囲内の最大値(例えば100%)となる。
可動部Y128が最大通電時位置にある場合、貫通孔Y120は、中間層Y12の板面に直交する方向に第1冷媒孔Y16、第2冷媒孔Y17と重なるが、当該方向に第3冷媒孔Y18とは重ならない。第3冷媒孔Y18は、中間層Y12の板面に直交する方向に可動部Y128と重なる。つまりこのとき、貫通孔Y120に対して第1冷媒孔Y16、第2冷媒孔Y17は全開になり、第3冷媒孔Y18は全閉になる。したがってこの場合、第1冷媒孔Y16が第2冷媒孔Y17に可動部Y128を介して連通し、第3冷媒孔Y18は第1冷媒孔Y16とも第2冷媒孔Y17とも遮断される。この結果、第1連通孔YV1と第2連通孔YV2との間で、流路Y81、第1冷媒孔Y16、貫通孔Y120、第2冷媒孔Y17、流路Y83を介した、冷媒の流通が可能となる。
また、マイクロバルブY1に供給される電力が(例えばPWM制御で)、最大電力未満かつゼロより大きい範囲内で、複数段階でまたは連続的に、調整される。これにより、可動部Y128を、非通電時位置と最大通電時位置の間のどの中間位置にでも、停止させることができる。例えば、最大通電時位置と非通電時位置からも等距離の位置(すなわち、中央位置)で可動部Y128を停止させるには、マイクロバルブY1に供給される電力が、制御範囲内の最大値の半分であればいい。例えば、PWM制御におけるデューティ比が50%であればいい。
可動部Y128が中間位置に停止している場合、第1冷媒孔Y16、第2冷媒孔Y17、第3冷媒孔Y18は、いずれも貫通孔Y120に連通している。しかし、第2冷媒孔Y17および第3冷媒孔Y18は、貫通孔Y120に対して全開状態ではなく、100%未満かつ0%よりも大きい中間開度となっている。可動部Y128が中間位置において最大通電位時位置に近づくほど、貫通孔Y120に対する第3冷媒孔Y18の中間開度が減少し、第2冷媒孔Y17の中間開度が増大する。
本実施形態では、後述する通り、第2冷媒孔Y17に対して高圧が作用し、第3冷媒孔Y18に対して当該高圧よりも高い低圧が作用する。このとき、可動部Y128が中間位置にあれば、第1冷媒孔Y16からマイクロバルブY1の外部に、当該低圧よりも高く当該高圧よりも低い中間圧が作用する。中間圧の値は、可動部Y128に対する第2冷媒孔Y17の開度と第3冷媒孔Y18の開度によって変動する。
図11に、電気配線Y6、Y7から第1印加点Y129、第2印加点Y130へ印加される電圧がPWM制御される場合における、デューティ比と、第1冷媒孔Y16からマイクロバルブY1の外部に作用される圧力(すなわち、制御圧または出口圧)との関係を例示する。この図に示すように、デューティ比が大きくなるほど、デューティ比の増加量に比例して、制御圧が高くなる。そして、デューティ比が100%の場合、制御圧が上記高圧と一致する。また、デューティ比が0%の場合、すなわち、非通電時、制御圧が上記低圧と一致する。
以上のように、梁Y127およびアームY126は、ヒンジYP0を支点とし、接続位置YP2を力点とし、接続位置YP3を作用点とする梃子として機能する。上述の通り、中間層Y12の板面に平行な面内におけるヒンジYP0から接続位置YP2までの直線距離よりも、ヒンジYP0から接続位置YP3までの直線距離の方が、長い。したがって、力点である接続位置YP2の移動量よりも、作用点である接続位置YP3の移動量の方が大きくなる。したがって、熱的な膨張による変位量が、梃子によって増幅されて可動部Y128に伝わる。
また、マイクロバルブY1における冷媒の流路は、Uターン構造を有している。具体的には、冷媒は、マイクロバルブY1の一方側の面からマイクロバルブY1内に流入し、マイクロバルブY1内を通って、マイクロバルブY1の同じ側の面からマイクロバルブY1外に流出する。そして同様にバルブモジュールY0における冷媒の流路も、Uターン構造を有している。具体的には、冷媒は、バルブモジュールY0の一方側の面からバルブモジュールY0内に流入し、バルブモジュールY0内を通って、バルブモジュールY0の同じ側の面からバルブモジュールY0外に流出する。これは、上述の通り、同じ中間層Y12に第1冷媒孔Y16、第2冷媒孔Y17、第3冷媒孔Y18が形成されているからである。なお、中間層Y12の板面に直交する方向は、第1外層Y11、中間層Y12、第2外層Y13の積層方向である。
このように構成されたマイクロバルブY1は、電磁弁およびステッピングモータと比べて容易に小型化できる。その理由の1つは、マイクロバルブY1が上述の通り半導体チップにより形成されていることである。また、上述の通り、梃子を利用して熱的な膨張による変位量が増幅されることも、そのような梃子を利用せずに電磁弁またはステッピングモータを利用する弁装置と比べた小型化に寄与する。また、複数本の第1リブY123、複数本の第2リブY124の変位は熱に起因して発生するので、騒音低減効果が高い。
また、梃子を利用しているので、熱的な膨張による変位量を可動部Y128の移動量より抑えることができるので、可動部Y128を駆動するための消費電力も低減することができる。また、電磁弁の駆動時における衝撃音を無くすことができるので、騒音を低減することができる。
上述のように、マイクロバルブY1もバルブモジュールY0もUターンの構造の冷媒流路を有しているので、ボディ51の掘り込みを少なくすることができる。つまり、バルブモジュールY0を配置するためにボディ51に形成された凹みの深さを抑えることができる。その理由は以下の通りである。
例えば、バルブモジュールY0がUターンの構造の冷媒流路を有しておらず、バルブモジュールY0のボディ51側の面に冷媒流入口があり、バルブモジュールY0の反対側の面に冷媒出口があったとする。その場合、バルブモジュールY0の両面に、冷媒流路を形成する必要がある。したがって、バルブモジュールY0の両面の冷媒流路までボディ51に収容しようとすると、バルブモジュールY0を配置するためにボディ51に形成しなければならない凹みが深くなってしまう。また、マイクロバルブY1自体が小型であるので、ボディ51の掘り込みを更に低減することができる。
また、マイクロバルブY1の両面のうち、第1冷媒孔Y16、第2冷媒孔Y17が形成される面とは反対側の面に電気配線Y6、Y7を配置した場合、電気配線Y6、Y7を大気雰囲気により近い側に置くことができる。したがって、電気配線Y6、Y7への冷媒雰囲気の影響を低減するためのハーメチック等のシール構造が不要となる。その結果、膨張弁5の小型化が実現できる。
また、マイクロバルブY1が軽量であることから、膨張弁5が軽量化される。また、マイクロバルブY1の消費電力が小さいので、膨張弁5が省電力化される。
[全体の作動]
以下、上記のように構成された冷凍サイクルの作動について説明する。
[非稼働時]
まず、冷凍サイクルの非稼働時について説明する。この場合、圧縮機2、送風機8が作動しておらず、冷凍サイクル内の冷媒は循環しない。また、複合センサ54cもドライバ回路54dも作動していない。また、マイクロバルブY1へは通電されていない。この場合、既に説明した通り、第3連通孔YV3と第1連通孔YV1とがマイクロバルブY1を介して連通し、第2連通孔YV2とマイクロバルブY1の貫通孔Y120の間が遮断される。したがって、図12に示すように、背圧室51mと低圧冷媒通路51kとが、低圧導入路51qおよびマイクロバルブY1を介して、連通している。
またこのとき、レシーバ4と膨張弁5の間の冷媒の圧力と、膨張弁5と蒸発器6の間の冷媒の圧力は互いに等しい。したがって、高圧冷媒通路51cにおける冷媒の圧力と低圧冷媒通路51kにおける冷媒の圧力も互いに等しい。それ故、低圧冷媒通路51kに連通する背圧室51mにおける冷媒の圧力と、高圧冷媒通路51cに連通する前側室51sの圧力も、互いに等しい。
したがって、弁体52に対して背圧室51mの冷媒が及ぼす力と前側室51sの冷媒が及ぼす力とが概ね同じになる。これにより、圧縮されたコイルバネ53の伸長しようとする力に付勢されて、弁体52は弁座51jに接触するまで移動し、絞り通路51hが閉じられる。
[稼働時]
次に、冷凍サイクルが稼働している状態について説明する。この場合、圧縮機2、送風機8が作動する。これにより、高圧冷媒通路51cにおける冷媒の圧力が、低圧冷媒通路51kにおける冷媒の圧力よりも高くなる。
また、複合センサ54c、ドライバ回路54dも作動する。したがってドライバ回路54dから電気配線Y6、Y7を介してマイクロバルブY1に、必要に応じて通電が行われる。
具体的には、蒸発後冷媒通路51fを通る冷媒の圧力と温度を、複合センサ54cが検出する。すなわち、複合センサ54cの感温部が、蒸発後冷媒通路51fを通る冷媒の圧力および温度にそれぞれ応じた圧力信号および温度信号を出力する。ドライバ回路54dは、その圧力信号および温度信号を取得し、取得した圧力信号と温度信号に応じて、電気配線Y6、Y7に供給する電力を決定する。なお、以下では、ドライバ回路54dは、電気配線Y6、Y7に供給する電力を、最大電圧一定のPWM制御で行うものとして説明する。したがって、ドライバ回路54dは、取得した圧力信号と温度信号に応じて、蒸発器6から流出した低圧冷媒の過熱度が所定の一定値になるよう、電気配線Y6、Y7に印加する電圧のデューティ比を決定する。
具体的には、ドライバ回路54dは、圧力信号が示す圧力が一定で温度信号が示す温度が高くなるほど、すなわち、過熱度が高くなるほど、デューティ比を小さくする。これにより、弁体52のリフト量が増大し、加熱度が低下する。また、温度信号が示す温度が一定で圧力信号が示す圧力が高くなるほど、すなわち、過熱度が低くなるほど、デューティ比を大きくする。これにより、弁体52のリフト量が減少し、過熱度が上昇する。
そして、ドライバ回路54dは、決定したデューティ比で、電気配線Y6、Y7を介して、マイクロバルブY1に電圧を印加する。これによって、蒸発器6から流出した低圧冷媒の過熱度が一定に保たれる。
例えば、デューティ比がゼロの場合、既に説明した通り、第3連通孔YV3と第1連通孔YV1とがマイクロバルブY1を介して連通し、第2連通孔YV2とマイクロバルブY1の貫通孔Y120の間が遮断される。したがって、図13に示すように、背圧室51mと低圧冷媒通路51kとが、低圧導入路51qおよびマイクロバルブY1を介して、連通している。
したがって、背圧室51mには低圧の冷媒が存在し、前側室51sには高圧冷媒通路51cから高圧の冷媒が存在する状態になる。つまり、背圧室51mの冷媒の圧力よりも前側室51sにおける冷媒の圧力の方が高い。その結果、弁体52は、コイルバネ53の伸長しようとする力に抗して背圧室51m側にオフセットされる。その結果、絞り通路51hの開度が最大の状態になる。したがって、高圧冷媒通路51cと低圧冷媒通路51kの圧力差が小さい。
また例えば、デューティ比が100%の場合、既に説明した通り、第2連通孔YV2と第1連通孔YV1とがマイクロバルブY1を介して連通し、第3連通孔YV3とマイクロバルブY1の貫通孔Y120の間が遮断される。したがって、図14に示すように、高圧冷媒通路51cと背圧室51mとが、高圧導入路51pおよびマイクロバルブY1を介して、連通している。
したがって、背圧室51mにも前側室51sにも同等の高圧の冷媒が存在する状態になる。その結果、弁体52は、コイルバネ53の伸長しようとする力によって、弁座51j側にオフセットされる。その結果、絞り通路51hの開度が最小の状態になる。ただし、開度はゼロより大きい。したがって、高圧冷媒通路51cと低圧冷媒通路51kの圧力差が大きくなる。
また例えば、デューティ比がゼロより大きく100%より小さい場合、既に説明した通り、第2連通孔YV2と第1連通孔YV1とがマイクロバルブY1を介して連通すると共に、第3連通孔YV3と第1連通孔YV1とがマイクロバルブY1を介して連通する。そして、マイクロバルブY1の第1冷媒孔Y16から第1連通孔YV1を介して背圧室51mに印加される冷媒圧力は、図11に示すように、低圧より大きく高圧より小さい範囲内で、デューティ比が大きくなるほど大きくなる。したがって、絞り通路51hの開度は、最小よりも大きくかつ最大よりも小さい範囲で、デューティ比が小さくなるほど大きくなる。ここで、低圧とは、低圧冷媒通路51kにおける冷媒の圧力である。また、高圧とは、高圧冷媒通路51cにおける冷媒の圧力であり、上記低圧よりも高い。
また、マイクロバルブY1のUターン構造において、第1外層Y11よりも第2外層Y13の方が弁体52に近い側に配置される。しかも、高圧冷媒通路51cと低圧冷媒通路51kがボディ51に形成されている。したがって、第2外層Y13よりも第1外層Y11の方が弁体52に近い側に配置される場合に比べ、マイクロバルブY1からボディ51へ冷媒を流す流路を短くすることができる。ひいては、膨張弁5を小型化することができる。
また、自律部54は、蒸発器6から流出した冷媒の温度および圧力を検出する複合センサ54cと、複合センサ54cが検出した温度および圧力に応じてリブY123、リブY124の温度を制御するドライバ回路54dと、を有する。このようになっていることで、膨張弁5は、自律的に高圧冷媒通路51cから低圧冷媒通路51kへ流れる流量を調整できる。
(第2実施形態)
次に第2実施形態について説明する。本実施形態は、第1実施形態のマイクロバルブY1が、故障検知機能を有するよう変更されている。具体的には、マイクロバルブY1は、第1実施形態と同じ構成に加え、図15、図16に示すように、故障検知部Y50を備えている。
故障検知部Y50は、中間層Y12のアームY126に形成されたブリッジ回路を含む。ブリッジ回路は、図16のように接続された4つのゲージ抵抗を含んでいる。つまり、故障検知部Y50は、ダイヤフラムに相当するアームY126の歪みに応じて抵抗が変化するブリッジ回路である。つまり、故障検知部Y50は半導体ピエゾ抵抗式の歪みセンサである。故障検知部Y50は、電気的絶縁膜を介して、アームY126と導通しないように、アームY126に接続されていてもよい。
このブリッジ回路の対角にある2つの入力端子に配線Y51、Y52が接続される。そして、配線Y51、Y52から当該入力端子に、定電流発生用の電圧が印加される。この配線Y51、Y52は、電気配線Y6、Y7を介してマイクロバルブY1に印加される電圧(すなわち、マイクロバルブ駆動電圧)から分岐して上記2つの入力端子まで伸びている。
また、このブリッジ回路の別の対角にある2つの出力端子に、配線Y53、Y54が接続される。そして、アームY126の歪み量に応じた電圧信号が配線Y53、Y54から出力される。この電圧信号は、後述する通り、マイクロバルブY1が正常に作動しているか否かを判別するための情報として使用される。配線Y53、Y54から出力される電圧信号は、ドライバ回路54dに入力される。
アームY126の歪み量に応じた電圧信号をドライバ回路54dが配線Y53、Y54を介して取得すると、ドライバ回路54d当該電圧信号に応じて、マイクロバルブY1の故障の有無を検知するための故障検知処理を行う。検知対象の故障としては、例えば、アームY126が折れる故障、可動部Y128と第1外層Y11または第2外層Y13との間に微小な異物が挟まって可動部Y128が動かなくなる故障、等がある。
複数本の第1リブY123および複数本の第2リブY124の伸縮に応じて、梁Y127および可動部Y128が変位する際、アームY126の歪み量が変化する。したがって、アームY126の歪み量に応じた電圧信号から、可動部Y128の位置を推定できる。一方、マイクロバルブY1が正常であれば、電気配線Y6、Y7からマイクロバルブY1への通電量と可動部Y128の位置との間にも相関関係がある。この通電量は、マイクロバルブY1を制御するための制御量である。
ドライバ回路54dは、このことを利用して、マイクロバルブY1の故障の有無を検知する。つまり、ドライバ回路54dは、配線Y53、Y54からの電圧信号から、あらかじめ定められた第1マップに基づいて、可動部Y128の位置を算出する。そして、あらかじめ定められた第2マップに基づいて、可動部Y128の位置から、正常時において当該位置を実現するために必要な電気配線Y6、Y7からマイクロバルブY1への供給電力を算出する。これら第1マップ、第2マップは、ドライバ回路54dの不揮発性メモリに記録されている。不揮発性メモリは、非遷移的実体的記憶媒体である。第1マップにおける電圧信号のレベルと位置との対応関係は、あらかじめ実験等によって定められてもよい。また、第2マップにおける位置と供給電力との対応関係も、あらかじめ実験等によって定められてもよい。
そしてドライバ回路54dは、算出された電力と、実際に電気配線Y6、Y7からマイクロバルブY1へ供給されている電力とを比較する。そして、ドライバ回路54dは、前者の電力と後者の電力の差の絶対値が許容値を超えていれば、マイクロバルブY1が故障していると判定し、許容値を超えていなければ、マイクロバルブY1が正常であると判定する。そして、ドライバ回路54dは、マイクロバルブY1が故障していると判定した場合に、マイクロバルブY1が故障していることを、不図示の信号線を介して、膨張弁5の外部の制御装置Y55に通知する。
この制御装置Y55は、例えば、車両用空調装置において圧縮機、送風機、エアミックスドア、内外気切替ドア等の作動を制御するエアコンECUであってもよい。あるいは、この制御装置Y55は、車両において、車速、燃料残量、電池残量等を表示するメータECUであってもよい。制御装置Y55は、マイクロバルブY1が故障していることの通知をドライバ回路54dから受けると、所定の故障報知制御を行う。
制御装置Y55は、この故障報知制御においては、車内の人に報知を行う報知装置Y56を作動させる。例えば、制御装置Y55は、警告ランプを点灯させてもよい。また、制御装置Y55は、画像表示装置に、マイクロバルブY1に故障が発生したことを示す画像を表示させてもよい。これによって、車両の乗員は、マイクロバルブY1の故障に気付くことができる。
また、制御装置Y55は、この故障報知制御においては、車両内の記憶装置に、マイクロバルブY1に故障が発生したことを示す情報を記録してもよい。この記憶装置は、非遷移的実体的記憶媒体である。これにより、マイクロバルブY1の故障を、膨張弁5の外部において記録に残すことができる。
また、ドライバ回路54dは、マイクロバルブY1が故障していると判定した場合は、通電停止制御を行う。通電停止制御では、ドライバ回路54dは、電気配線Y6、Y7からマイクロバルブY1への通電を停止させる。このように、マイクロバルブY1の故障時にマイクロバルブY1への通電を停止することで、マイクロバルブY1の故障時の安全性を高めることができる。
以上のように、故障検知部Y50が、マイクロバルブY1が正常に作動しているか否かを判別するための電圧信号を出力することで、ドライバ回路54dは、マイクロバルブY1の故障の有無を容易に判別することができる。
また、この電圧信号は、アームY126の歪み量に応じた信号である。したがって、電気配線Y6、Y7からマイクロバルブY1への通電量とこの電圧信号との関係に基づいて、マイクロバルブY1の故障の有無を容易に判別することができる。
なお、本実施形態では、ブリッジ回路を構成する抵抗の変化に基づいてマイクロバルブY1が故障しているか否かが判定されている。しかし、他の方法として、静電容量の変化に基づいてマイクロバルブY1が故障しているか否かが判定されてもよい。この場合、ブリッジ回路の代わりに容量成分を形成する複数の電極がアームY126に形成される。アームY126の歪み量と複数の電極間の静電容量の間は相関関係がある。したがって、制御装置Y55は、この複数の電極間の静電容量の変化に基づいて、マイクロバルブY1が故障しているか否かを判定できる。なお、第1実施形態に対する本実施形態の変更は、後述する第4~第10実施形態に対しても適用可能である。
(第3実施形態)
次に第3実施形態について説明する。本実施形態は、第1実施形態に対して、ホール素子55および磁石56が追加されている。ホール素子55および磁石56は、弁体52と弁座51jとの間の距離を、すなわち、弁体52のリフト量を、検出するための構成である。
ホール素子55は、ボディ51における弁座51jの近傍に固定される。そしてホール素子55は、弁室51gと低圧冷媒通路51kとを繋ぐ流路をとり囲むように、配置される。そしてホール素子55は、ドライバ回路54dに電気的に接続されている。磁石56は、弁体52の弁座51j側の先端部に固定されている。磁石56は、永久磁石でも、ドライバ回路54dの作動時に通電されている電磁石でもよい。
弁体52が移動すると、それと一体に磁石56も移動する。したがって、弁体52が移動すると、ホール素子55およびその周囲の磁界が変化する。ホール素子55からドライバ回路54dには、この磁界に応じたセンサ信号が入力される。ドライバ回路54dは、このセンサ信号に基づいて、弁体52のリフト量を算出することができる。したがって、ホール素子55は、ギャップセンサとして機能する。
膨張弁5の動作が正常であれば、電気配線Y6、Y7からマイクロバルブY1への通電量と弁体52のリフト量との間にも相関関係がある。ドライバ回路54dは、このことを利用して、このリフト量の情報から、膨張弁5の故障の有無を検知する。
具体的には、ドライバ回路54dは、算出されたリフト量から、あらかじめ定められた対応マップに基づいて、正常時において当該リフト量を実現するために必要な電気配線Y6、Y7からマイクロバルブY1への供給電力を算出する。算出された供給電力を、必要供給電力という。対応マップは、ドライバ回路54dの不揮発性メモリに記録されている。不揮発性メモリは、非遷移的実体的記憶媒体である。対応マップにおけるリフト量と供給電力との対応関係は、あらかじめ実験等によって定められてもよい。
そしてドライバ回路54dは、算出された必要供給電力と、実際に電気配線Y6、Y7からマイクロバルブY1へ供給されている電力とを比較する。そして、ドライバ回路54dは、前者の電力と後者の電力の差の絶対値が許容値を超えていれば、膨張弁5が故障していると判定し、許容値を超えていなければ、膨張弁5が正常であると判定する。そして、ドライバ回路54dは、膨張弁5が故障していると判定した場合に、膨張弁5が故障していることを、膨張弁5の外部の制御装置Y55に通知する。なお、本実施形態では、ドライバ回路54dから制御装置Y55に通知が可能なように、ドライバ回路54dから制御装置Y55まで信号線が接続されている。
この制御装置Y55は、例えば、車両用空調装置において圧縮機、送風機、エアミックスドア、内外気切替ドア等の作動を制御するエアコンECUであってもよい。あるいは、この制御装置Y55は、車両において、車速、燃料残量、電池残量等を表示するメータECUであってもよい。制御装置Y55は、膨張弁5が故障していることの通知をドライバ回路54dから受けると、所定の故障報知制御を行う。
制御装置Y55は、この故障報知制御においては、車内の人に報知を行う報知装置Y56を作動させる。例えば、制御装置Y55は、警告ランプを点灯させてもよい。また、制御装置Y55は、画像表示装置に、膨張弁5に故障が発生したことを示す画像を表示させてもよい。これによって、車両の乗員は、膨張弁5の故障に気付くことができる。
また、制御装置Y55は、この故障報知制御においては、車両内の記憶装置に、膨張弁5に故障が発生したことを示す情報を記録してもよい。この記憶装置は、非遷移的実体的記憶媒体である。これにより、膨張弁5の故障を、膨張弁5の外部において記録に残すことができる。
また、ドライバ回路54dは、膨張弁5が故障していると判定した場合は、通電停止制御を行う。通電停止制御では、ドライバ回路54dは、電気配線Y6、Y7から膨張弁5への通電を停止させる。このように、マイクロバルブY1の故障時にマイクロバルブY1への通電を停止することで、マイクロバルブY1の故障時の安全性を高めることができる。
以上のように、ギャップセンサであるホール素子55が、マイクロバルブY1が正常に作動しているか否かを判別するためのセンサ信号を出力することで、ドライバ回路54dは、マイクロバルブY1の故障の有無を容易に判別することができる。なお、第1実施形態に対する本実施形態の変更は、後述する第4~第10実施形態に対しても適用可能である。
(第4実施形態)
次に、第4実施形態について、図18~図26を用いて説明する。本実施形態と第1実施形態で同じ符号が付された部材は、以下に別記しない限り、同等の構成を有する。本実施形態の冷凍サイクル1は、第1実施形態の冷凍サイクル1に対して、膨張弁5の構成のみが異なっている。圧縮機2、凝縮器3、レシーバ4の構成は第1実施形態と同じである。
本実施形態の膨張弁5が第1実施形態の膨張弁5と異なるのは、バルブモジュールY0の位置、構成、弁室51gの構成等である。以下、膨張弁5の第1実施形態と異なる部分を中心に説明する。
膨張弁5は、図18に示すように、ボディ51、弁体52、コイルバネ53、自律部54、バルブモジュールY0、荷重調整部67等を有する。
ボディ51の用途および材質は、第1実施形態と同じである。ボディ51に形成された第1流入口51a、第1流出口51b、第2流入口51d、第2流入口51d、第2流出口51e、蒸発後冷媒通路51f、弁室51g、絞り通路51hの構成、用途および外部との接続形態は、第1実施形態と同様である。ただし、弁体52が収容される弁室51gにおいては、弁室51gの絞り通路51h側とは異なる圧力となる背圧室は設けられていない。
以下、膨張弁5において、蒸発後冷媒通路51fと弁体52の並び方向を縦方向といい、蒸発後冷媒通路51fの伸びる方向を幅方向といい、縦方向にも幅方向にも直交する方向を厚み方向という。図18においては、上下方向が縦方向に相当し、左右方向が幅方向に相当し、紙面垂直方向が厚み方向に相当する。なお、膨張弁5の外形は、縦方向の長さ、幅方向の長さ、厚み方向の長さの順に、長い。これは、第1~第3実施形態も同様である。
自律部54は、第1実施形態と同様のケーシング54a、回路基板54b、複合センサ54c、ドライバ回路54dを有している。
コイルバネ53は、第1実施形態と同様、弁体52に対して絞り通路51hを閉弁させる側に付勢している弾性体である。具体的には、コイルバネ53は、弁体52を基準として蒸発後冷媒通路51fとは反対側に位置している。コイルバネ53の弁体52側の端部は弁体52に当接して弁体52を押圧し、弁体52とは反対側の端部は荷重調整部67に当接して荷重調整部67を押圧している。
荷重調整部67は、弁室51gを閉じて弁室51gをボディ51の外部の空間から仕切る蓋部材である。また、荷重調整部67とボディ51の間には、シールリング68が配置されている。このシールリング68により、弁室51gとボディ51の外部空間との間が液密にシールされる。
荷重調整部67の中心軸を囲む外周にはネジ山およびネジ溝が形成されており、ボディ51の荷重調整部67が嵌る部分にもネジ山およびネジ溝が形成されている。これにより、荷重調整部67が雄ネジとなり、ボディ51が雌ネジとなって、荷重調整部67がボディ51に螺合される。なお、荷重調整部67の中心軸は、図18において縦方向(すなわち、弁体52の移動方向)に伸びる。
荷重調整部67の弁室51gとは反対側の表面は、ボディ51の外部の空間に露出した操作受付部67aが形成されている。操作受付部67aは、図21に示すように、六角柱形状の穴を囲む形状となっている。この操作受付部67aは、ボディ51の外部からコイルバネ53の弾性力の調整のための作業者等の操作を受け付けることができる。
操作とは、この六角柱形状の穴に六角レンチ等の治具を挿入して荷重調整部67の中心軸を中心として回転させる操作である。この操作が行われることで、荷重調整部67は中心軸を回転中心として回転しながら中心軸に沿った方向に移動する。この荷重調整部67の移動により、コイルバネ53の弾性力が調整される。
膨張弁5には、第1実施形態には無い連通孔57、収容孔58が形成されている。連通孔57は、一端が蒸発後冷媒通路51fに連通し、縦方向に伸び、他端が高圧冷媒通路51cに連通する。連通孔57のうち、蒸発後冷媒通路51f側の部分に対し、高圧冷媒通路51c側の部分の方が、流路断面積が小さい。
収容孔58は、一端が蒸発後冷媒通路51fに連通し、縦方向に伸び、他端が低圧冷媒通路51kに連通する。
また、膨張弁5は、コイルバネ64、圧力伝達部65を有している。コイルバネ64は、その全部が収容孔58内に収容された弾性部材であり、収容孔58内を縦方向に移動可能である。コイルバネ64は、圧力伝達部65を弁体52の方向に付勢している。収容孔58のうち、コイルバネ64が配置されている部分は、弁体52を移動させるための制御圧を発生する圧力室58aである。
圧力伝達部65は、コイルバネ64側の一部が収容孔58内に収容されてコイルバネ64に当接する。そして圧力伝達部65は、コイルバネ64と当接する部分から、収容孔58と低圧冷媒通路51kの連通部分を通って低圧冷媒通路51k内に伸びる。更に圧力伝達部65は、低圧冷媒通路51k内を通って低圧冷媒通路51kと弁室51gの連通部分から弁室51g内に伸びる。更に圧力伝達部65は、弁室51gにおいて、弁体52の、コイルバネ53とは反対側に、当接する。そして圧力伝達部65は、収容孔58内で縦方向に移動可能になっている。
このような配置により、圧力伝達部65は、圧力室58aに発生した制御圧と、コイルバネ64の弾性力を受けて、当該制御圧および弾性力に応じた力(すなわちそれらの合力)を弁体52に伝達する。したがって、弁体52は、圧力室58aの制御圧、コイルバネ64の弾性力、およびコイルバネ53の弾性力が釣り合うよう、圧力室58aの制御圧に応じて、弁室51g内で位置を変える。そして弁体52の位置の変化に応じて、絞り通路51hの開度が変動する。
また、圧力伝達部65の外周には、圧力伝達部65の外周と収容孔58の内壁に接触するシールリング66が固定されている。このシールリング66により、圧力伝達部65の外周において、圧力室58aと低圧冷媒通路51kの間がシールされる。
また、圧力伝達部65の内部には、圧力室58aの冷媒を低圧冷媒通路51kに導く低圧連通流路58bが形成されている。この低圧連通流路58bは、一端が圧力室58aに開口し、他端が低圧冷媒通路51kに開口することで、低圧連通流路58bから低圧冷媒通路51kまで連通する。
また、低圧連通流路58bにおける圧力室58aと低圧冷媒通路51kの間には、絞り部58cが形成されている。絞り部58cは、低圧連通流路58bに沿って流路断面積が低下する形状となっている。つまり絞り部58cは、その両端の流路よりも流路断面積が小さい。このような絞り部58cにより、その前後で圧力差を生じさせることができる。つまり、圧力室58aと低圧冷媒通路51kの間で圧力差を生じさせることができる。
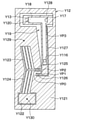
ここで、バルブモジュールY0について、図18、図19、図20、図22、図23、図24を用いて説明する。本実施形態のバルブモジュールY0は、回路基板54bと弁体52の間に配置され、マイクロバルブY1、バルブケーシングY2、3つのOリング62a、62b、62c、2本の電気配線Y6、Y7、および変換プレートY8を有している。
本実施形態のマイクロバルブY1は、第1冷媒孔Y16、第2冷媒孔Y17、第3冷媒孔Y18の形状が円形でなく矩形である点で、第1実施形態と異なる。本実施形態のマイクロバルブY1は、第2外層Y13において第1冷媒孔Y16が形成される位置が、第1実施形態と異なる。また、本実施形態のマイクロバルブY1は、梁Y127および可動部Y128の形状が、第1実施形態と異なる。マイクロバルブY1の他の構成は、第1実施形態と同じである。
梁Y127、可動部Y128が第1実施形態と異なるのは、図22、図23、図24に示すように、可動部Y128と共に中間層Y12の表裏に貫通する貫通孔Y120を囲む枠形状となっている点である。
そして、第1冷媒孔Y16は、その貫通孔Y120のうち梁Y127に囲まれた部分と、第1外層Y11、中間層Y12、第2外層Y13の積層方向に重なる。そして第1冷媒孔Y16は、可動部Y128とアームY126から等距離の位置よりもアームY126に近い位置に配置されている。梁Y127、可動部Y128のその他の構成は、第1実施形態と同じである。
マイクロバルブY1の作動の形態は、第1実施形態と同様である。可動部Y128が非通電時位置にあっても、最大通電時位置にあっても、どの中間位置にあっても、第1冷媒孔Y16と貫通孔Y120は第1外層Y11、中間層Y12、第2外層Y13の積層方向に重なるからである。可動部Y128の位置にかかわらず、第1冷媒孔Y16は冷媒室Y19の貫通孔Y120に連通する。第2冷媒孔Y17、第3冷媒孔Y18の連通、遮断の態様については、第1実施形態と同様である。
電気配線Y6、Y7は、それぞれ一端がマイクロバルブY1の第1印加点Y129、第2印加点Y130に接続され、貫通孔Y14、Y15を通って、他端で回路基板54bにプリントされたパターンに接続される。回路基板54bに実装されたドライバ回路54dは、当該パターンに接続されている。これにより、電気配線Y6、Y7を通して、ドライバ回路54dからマイクロバルブY1に電力が供給可能となる。互いに対向するマイクロバルブY1と回路基板54bの間には空隙が介在するので、電気配線Y6、Y7の配策が容易である。
変換プレートY8は、第1実施形態と同様、マイクロバルブY1とバルブケーシングY2の間に配置されており、その表裏に貫通する流路Y81、Y82、Y83が形成されている。これら流路Y81、Y82は、冷媒孔Y16、Y17の配置関係と、連通孔YV1、YV2間の配置関係との違いを、吸収する。
流路Y81の一端は第1冷媒孔Y16に連通し、他端は後述する第1連通孔YV1に連通する。したがって、第1冷媒孔Y16は流路Y81を介して第1連通孔YV1に連通する。流路Y82の一端は第2冷媒孔Y17に連通し、他端は後述する第2連通孔YV2に連通する。したがって、第2冷媒孔Y17は流路Y82を介して第2連通孔YV2に連通する。流路Y83の一端は第3冷媒孔Y18に連通するが、図20に示すように、流路Y83の他端はバルブケーシングY2によって堰き止められている。tうまり、第3冷媒孔Y18は実質的に塞がれている。
バルブケーシングY2は、第1実施形態と同様、マイクロバルブY1および変換プレートY8を収容してマイクロバルブY1とボディ51の線膨張係数の違いを吸収する樹脂製のケーシングである。また、バルブケーシングY2は、マイクロバルブY1を囲むベース部Y20と、マイクロバルブY1から突出する柱形状の第1突出部Y21、第2突出部Y22を有する。第1突出部Y21は制御圧パイプに対応し、第2突出部Y22は低圧パイプに対応する。ベース部Y20、第1突出部Y21、第2突出部Y22は、一体に形成されてもよいし、されなくてもよい。
ベース部Y20は、ケーシング54aとボディ51の間に配置され、ボディ51に形成された開口51tを囲むように固定部63によって固定される。開口51tは、ボディ51に形成され、ケーシング54aに囲まれる空間から蒸発後冷媒通路51fに貫通する。
第1突出部Y21は、一端においてベース部Y20に接続されると共に変換プレートY8に接し、開口51tおよび蒸発後冷媒通路51fを貫通して伸び、他端において収容孔58内に嵌っている。このように、第1突出部Y21は、蒸発後冷媒通路51fをマイクロバルブY1の側から圧力室58aの側へ貫通する。
第2突出部Y22は、一端においてベース部Y20に接続されると共に変換プレートY8に接し、開口51tおよび蒸発後冷媒通路51fを貫通して伸び、他端において連通孔57内に嵌っている。このように、第2突出部Y22は、蒸発後冷媒通路51fをマイクロバルブY1の側から圧力室58aの側へ貫通する。第1突出部Y21、第2突出部Y22の伸びる方向は、幅方向に対しても厚み方向に対しても交差する。より具体的には、第1突出部Y21、第2突出部Y22の伸びる方向は、縦方向である。
第1突出部Y21と第2突出部Y22は、蒸発後冷媒通路51fにおいて、幅方向(すなわち、蒸発後冷媒通路51f内を冷媒が流れる方向)に並んで配置されている。この並びにより、蒸発後冷媒通路51f内における冷媒の圧力損失が低減される。第1突出部Y21と第2突出部Y22は、開口51t内部においては、互いに一体に接続されている。そして、開口51t内の第1突出部Y21および第2突出部Y22の外周に、Oリング62cが配置されている。Oリング62cは、第1突出部Y21および第2突出部Y22の外周と開口51tの内壁の両方に接触することで、ケーシング54aに囲まれた空間と蒸発後冷媒通路51fとの間をシールする。
また、収容孔58内の第1突出部Y21の外周に、Oリング62aが配置されている。Oリング62aは、第1突出部Y21の外周と収容孔58の内壁の両方に接触することで、蒸発後冷媒通路51fと圧力室58aの間をシールする。また、連通孔57内の第2突出部Y22の外周に、Oリング62bが配置されている。Oリング62bは、第2突出部Y22の外周と連通孔57の内壁の両方に接触することで、蒸発後冷媒通路51fと高圧冷媒通路51cの間をシールする。
また、第1突出部Y21の内部には、第1連通孔YV1が形成されている。第1連通孔YV1は、制御圧導入孔に対応する。第1連通孔YV1は、蒸発後冷媒通路51fよりもマイクロバルブY1側において第1冷媒孔Y16に連通し、蒸発後冷媒通路51fよりも圧力室58a側において圧力室58aに連通する。このように、蒸発後冷媒通路51fを貫通する第1突出部Y21内に第1連通孔YV1が形成されることで、ボディ51の厚み方向の体格を抑えながら、圧力室58aに導入される冷媒と蒸発後冷媒通路51fを流れる冷媒の干渉を防止できる。
また、第2突出部Y22の内部には、第2連通孔YV2が形成されている。第2連通孔YV2は、高圧導入孔に対応する。第2連通孔YV2は、蒸発後冷媒通路51fよりもマイクロバルブY1側において第2冷媒孔Y17に連通し、蒸発後冷媒通路51fよりも高圧冷媒通路51c側において連通孔57を介して高圧冷媒通路51cに連通する。このように、蒸発後冷媒通路51fを貫通する第2突出部Y22内に第2連通孔YV2が形成されることで、ボディ51の厚み方向の体格を抑えながら、高圧冷媒と蒸発後冷媒通路51fを流れる低圧冷媒の干渉を防止できる。
膨張弁5が上記のような構成となっていることで、回路基板54b、マイクロバルブY1、第1突出部Y21、圧力室58a、圧力伝達部65、弁体52、コイルバネ53、荷重調整部67が、この順に縦方向に一列に並ぶ。また、マイクロバルブY1、蒸発後冷媒通路51f、圧力室58a、低圧冷媒通路51k、弁室51gも、この順に縦方向に一列に並ぶ。
以下、このような構成の冷凍サイクル1の作動について、第1実施形態と異なる点を中心に説明する。なお、第3冷媒孔Y18は、開口しても開口しなくても、貫通孔Y120を他の冷媒流路と連通させることはない。また、第1冷媒孔Y16は、可動部Y128の位置によらず常に開口するので、マイクロバルブY1の貫通孔Y120は第1連通孔YV1を介して収容孔58と常に連通する。
[非稼働時]
まず、冷凍サイクルの非稼働時について説明する。この場合、冷凍サイクル1の各装置の作動、非作動および通電、非通電は、第1実施形態と同じである。この場合、第2連通孔YV2とマイクロバルブY1の貫通孔Y120の間が遮断される。
またこのとき、第1実施形態と同様、レシーバ4と膨張弁5の間の冷媒の圧力と、膨張弁5と蒸発器6の間の冷媒の圧力は互いに等しい。したがって、高圧冷媒通路51cにおける冷媒の圧力と低圧冷媒通路51kにおける冷媒の圧力も互いに等しい。
また、低圧連通流路58bを介して低圧冷媒通路51kと収容孔58とが長時間連通しているので、収容孔58の圧力は低圧冷媒通路51kの圧力と同じになる。また、弁室51gの圧力は低圧冷媒通路51kの圧力と同じになる。したがって、コイルバネ53の弾性力とコイルバネ64の弾性力とのつり合いにより、図26に示すように、弁体52は弁座51jに接触し、絞り通路51hが閉じられる。
[稼働時]
次に、冷凍サイクルが稼働している状態について説明する。この場合、圧縮機2、送風機8が作動する。これにより、高圧冷媒通路51cにおける冷媒の圧力が、低圧冷媒通路51kにおける冷媒の圧力よりも高くなる。また、複合センサ54c、ドライバ回路54dも作動する。したがってドライバ回路54dから電気配線Y6、Y7を介してマイクロバルブY1に、必要に応じて通電が行われる。
具体的には、蒸発後冷媒通路51fを通る冷媒の圧力と温度を、複合センサ54cが検出する。すなわち、複合センサ54cの感温部が、蒸発後冷媒通路51fを通る冷媒の圧力および温度にそれぞれ応じた圧力信号および温度信号を出力する。ドライバ回路54dは、その圧力信号および温度信号を取得し、取得した圧力信号と温度信号に応じて、電気配線Y6、Y7に供給する電力を決定する。なお、以下では、ドライバ回路54dは、電気配線Y6、Y7に供給する電力を、最大電圧一定のPWM制御で行うものとして説明する。したがって、ドライバ回路54dは、取得した圧力信号と温度信号に応じて、蒸発器6から流出した低圧冷媒の過熱度が所定の一定値になるよう、電気配線Y6、Y7に印加する電圧のデューティ比を決定する。
具体的には、ドライバ回路54dは、圧力信号が示す圧力が一定で温度信号が示す温度が高くなるほど、すなわち、過熱度が高くなるほど、デューティ比を大きくする。これにより、弁体52のリフト量が増大し、加熱度が低下する。また、温度信号が示す温度が一定で圧力信号が示す圧力が高くなるほど、すなわち、過熱度が低くなるほど、デューティ比を小さくする。これにより、弁体52のリフト量が減少し、過熱度が上昇する。
そして、ドライバ回路54dは、決定したデューティ比で、電気配線Y6、Y7を介して、マイクロバルブY1に電圧を印加する。これによって、蒸発器6から流出した低圧冷媒の過熱度が一定に保たれる。
例えば、デューティ比が100%に上昇した場合、第2連通孔YV2と第1連通孔YV1とがマイクロバルブY1を介して連通する。したがって、高圧冷媒通路51cにおける高圧冷媒が、連通孔57、第2連通孔YV2、流路Y82、第2冷媒孔Y17を介してマイクロバルブY1内に導入される。そして、当該高圧冷媒が、マイクロバルブY1の第1冷媒孔Y16から、流路Y81、第1連通孔YV1を介して、圧力室58aに印加される。
これにより、圧力室58aの圧力が高圧になり、圧力伝達部65を介して弁体52に伝達される力が最大になる。その結果、図25に示すように、絞り通路51hの開度およびリフト量が最大の状態になる。なお、圧力室58aと低圧冷媒通路51kは低圧連通流路58bを介して連通しているが、低圧連通流路58bには絞り部58cが形成されているので、圧力室58aと低圧冷媒通路51kの圧力差は維持される。
また例えば、デューティ比がゼロより大きく100%より小さい場合、第2連通孔YV2と第1連通孔YV1とがマイクロバルブY1を介して連通する。ただし、第2冷媒孔Y17の開度は、デューティ比が100%のときよりは小さく、かつ、デューティ比が大きくなるほど大きくなる。したがって、マイクロバルブY1の貫通孔Y120における圧力は、第1冷媒孔Y16による減圧効果により、デューティ比が小さくなるほど低くなる。
したがって、マイクロバルブY1の第1冷媒孔Y16から第1連通孔YV1を介して圧力室58aに出力される冷媒圧力は、デューティ比が小さくなるほど低くなる。これにより、圧力伝達部65を介して弁体52に伝達される力が、最大よりも小さく最小よりも大きい値になる。そして、絞り通路51hの開度およびリフト量は、最小よりも大きくかつ最大よりも小さい範囲で、デューティ比が小さくなるほど小さくなる。
また例えば、デューティ比が0%に低下した場合、第2冷媒孔Y17が遮断される。すると、高圧冷媒通路51cからマイクロバルブY1内の貫通孔Y120への冷媒の流れが断たれる。すると、圧力室58a内の冷媒が低圧連通流路58bを通って徐々に低圧冷媒通路51kに流出すると共に、圧力室58a内の冷媒の圧力が低下する。そして最終的に、圧力室58a内の冷媒の圧力が低圧冷媒通路51kの圧力と同じになる。したがって、圧力伝達部65から弁体52に伝達される力も徐々に減少することでリフト量および絞り通路51hの開度が低下し、最終的に、図26のようにゼロになる。
なお、上述の通り、冷凍サイクル1の稼働時において、デューティ比が0より大きく弁体52のリフト量がゼロより大きい場合、圧力室58aと低圧冷媒通路51kの間に圧力差が発生する。そしてこのとき、高圧冷媒通路51cから、連通孔57、第2連通孔YV2、第2冷媒孔Y17、貫通孔Y120、第1冷媒孔Y16、第1連通孔YV1、圧力室58a、低圧連通流路58bをこの順に通って、低圧冷媒通路51kに、冷媒が流れる。その際、上述の通り、絞り部58cの減圧作用により、圧力室58aと低圧冷媒通路51kの間の圧力差はあり続ける。ただし、このような冷媒の流量は、弁室51gを介して高圧冷媒通路51cから低圧冷媒通路51kに流れる冷媒の流量よりも遙かに少ない。
このように、低圧連通流路58bは、マイクロバルブY1から流出する冷媒を高圧冷媒通路51cに導く。これにより、低圧連通流路58bから低圧冷媒通路51kに導かれた冷媒は、蒸発器6に流入する。したがって、第1冷媒孔Y16から低圧側に導かれた冷媒が蒸発器6に流入しない場合に比べて、熱交換に寄与しない冷媒を低減することができる。ひいては、冷媒を無駄に使用する可能性が低減され、冷凍サイクル1の効率が向上する。
また、第1冷媒孔Y16は、低圧冷媒通路51kの低圧よりも高い制御圧を圧力室58aに出力し、低圧連通流路58bは、第1冷媒孔Y16から流出した冷媒を低圧冷媒通路51kに導く。そして、低圧連通流路58bには、低圧連通流路58bに沿って流路断面積が低下する絞り部58cが設けられている。
このように、低圧連通流路58bが第1冷媒孔Y16から流出した冷媒を低圧冷媒通路51kに導くように構成されていることで、マイクロバルブY1の第3冷媒孔Y18を低圧連通流路に連通させる必要がなくなる。また、このような構成において低圧連通流路58bに絞り部58cが形成されていることで、絞り部58cの前後で圧力差を生じさせることができるので、制御圧を出力するという第1冷媒孔Y16の機能が損ねられる可能性が低減される。
また、圧力伝達部65は、圧力室58aから低圧冷媒通路51kを通って弁体52まで伸び、低圧連通流路58bは、圧力伝達部65の内部に形成されて圧力室58aから低圧冷媒通路51kまで連通する。このように、圧力伝達部65が圧力室58aの制御圧を受けると共に低圧冷媒通路51kを通ることを利用し、圧力室58aから低圧冷媒通路51kまで連通する低圧連通流路58bを形成することで、低圧連通流路58bのためだけの部材を設ける必要がなくなる。
また、複合センサ54c、マイクロバルブY1、ドライバ回路54dは、蒸発後冷媒通路51fを基準として弁体52とは反対側に配置される。このようになっていることで、センサ、制御弁部品およびドライバ回路間の電気的配線の配策が容易になる。
また、ボディ51において、マイクロバルブY1、蒸発後冷媒通路51f、圧力室58aが、この順に縦方向に一列に並んで配置されている。そして、制御圧パイプである第1突出部Y21は、蒸発後冷媒通路51fをマイクロバルブY1の側から圧力室58aの側へ貫通する。そして、第1突出部Y21には、蒸発後冷媒通路51fよりもマイクロバルブY1の側において第1冷媒孔Y16に連通し、蒸発後冷媒通路51fよりも圧力室58a側において圧力室58aに連通する第1連通孔YV1が形成される。
このような構成により、蒸発後冷媒通路51fを貫通する第1突出部Y21に形成された第1連通孔YV1を介して、マイクロバルブY1から制御圧を及ぼすことができる。したがって、マイクロバルブY1の機能も維持しつつ、複合センサ54c、マイクロバルブY1およびドライバ回路54d間の電気的配線の配策が容易になる。そして、マイクロバルブY1、厚み方向における弁装置の体格を抑制することができる。
(第5実施形態)
次に第5実施形態について、図27、図28を用いて説明する。本実施形態に係る冷凍サイクル1は、第4実施形態の冷凍サイクル1に対して、低圧連通流路58bの配設形態が変更されている。その他の構成は、第4実施形態と同じである。
本実施形態の低圧連通流路58bは、圧力伝達部65の内部に形成されているのではなく、圧力伝達部65の外周面と収容孔58の内周面の間の隙間という形態で、配設される。この低圧連通流路58bは、一端において圧力室58aに連通し、他端において低圧冷媒通路51kに連通する。
また、低圧連通流路58bが圧力室58aと低圧冷媒通路51kの両方に連通するために、シールリング66には、図28に示すように、冷媒が通過可能なスリット66aが形成されている。このスリット66aは、縦方向(ずなわち、図28の紙面に直交する方向)に貫通している。このスリット66aは、低圧連通流路58bの一部であり、スリット66aの他の部分よりも流路断面積が小さい。したがって、スリット66aは、圧力室58aと低圧冷媒通路51kの間に圧力差を発生させる絞り部として機能する。
本実施形態における冷凍サイクル1の作動は、第4実施形態の低圧連通流路58b、スリット66aを本実施形態の低圧連通流路58b、スリット66aに置き換えたものとなる。
以上のように、収容孔58は圧力室58aを含むと共に低圧冷媒通路51kに連通すること、圧力伝達部65が圧力室58aの制御圧を受けると共に低圧冷媒通路51kを通ることを利用し、収容孔58の内壁面と圧力伝達部65の外周面との間の隙間に低圧連通流路58bを設けることができる。このようにすることで、低圧連通流路58bのためだけの部材を設ける必要がなくなる。また、シールリング66を絞り部として利用することができるので、絞り部を設けるためにボディ51、圧力伝達部65の形状を複雑にする必要がなくなる。また、本実施形態において第4実施形態と同様の構成からは、第4実施形態と同様の効果を得ることができる。
(第6実施形態)
次に第6実施形態について、図29を用いて説明する。本実施形態に係る冷凍サイクル1は、第4実施形態の冷凍サイクル1に対して、低圧連通流路58bの配設形態が変更されている。その他の構成は、第4実施形態と同じである。
本実施形態の低圧連通流路58bは、圧力伝達部65の内部ではなく、圧力室58aから圧力伝達部65をバイパスして低圧冷媒通路51kに連通するよう、ボディ51に形成されている。この低圧連通流路58bは、圧力室58aにおいて収容孔58から分岐して、ボディ51内を低圧冷媒通路51kまで伸びている。
また、低圧連通流路58bにおける圧力室58aと低圧冷媒通路51kの間には、第4実施形態と同様に流路断面積が前後よりも小さい絞り部58cが形成されている。このような絞り部58cにより、その前後で圧力差を生じさせることができる。つまり、圧力室58aと低圧冷媒通路51kの間で圧力差を生じさせることができる。本実施形態において第4実施形態と同様の構成からは、第4実施形態と同様の効果を得ることができる。
(第7実施形態)
次に第7実施形態について、図30を用いて説明する。本実施形態に係る冷凍サイクル1は、第4実施形態の冷凍サイクル1に対して、バルブケーシングY2の構成、変換プレートY8の構成、低圧連通流路の配設形態、およびボディ51の構造が、異なっている。その他の構成は、第4実施形態と同じである。以下、第4実施形態と異なる点を中心に説明する。
本実施形態のバルブケーシングY2は、第4実施形態と同様のベース部Y20、第1突出部Y21、第2突出部Y22、Oリング62a、62b、62cに加え、第3突出部Y23を有する。第3突出部Y23は低圧パイプに対応する。ベース部Y20、第1突出部Y21、第2突出部Y22、第3突出部Y23は、一体に形成されてもよいし、されなくてもよい。
第3突出部Y23は、一端においてベース部Y20に接続されると共に変換プレートY8に接し、開口51tおよび蒸発後冷媒通路51fを貫通して伸び、他端において連通孔59内に嵌っている。連通孔59は、本実施形態においてボディ51に形成された孔であり、一端は蒸発後冷媒通路51fに連通し、他端は低圧冷媒通路51kに連通する。
このように、第3突出部Y23は、蒸発後冷媒通路51fをマイクロバルブY1の側から圧力室58aおよび低圧冷媒通路51kの側へ貫通する。第3突出部Y23の伸びる方向は、幅方向にも厚み方向にも交差し、より具体的には、縦方向である。第1突出部Y21、第2突出部Y22、第3突出部Y23は、蒸発後冷媒通路51fにおいて、幅方向(すなわち、蒸発後冷媒通路51f内を冷媒が流れる方向)に並んで配置されている。この並びにより、蒸発後冷媒通路51f内における冷媒の圧力損失が低減される。
第1突出部Y21、第2突出部Y22、第3突出部Y23は、開口51t内部においては、互いに一体に接続されている。そして、開口51t内の第1突出部Y21、第2突出部Y22、第3突出部Y23の外周に、第4実施形態と同様のOリング62cが配置されている。
また、連通孔59内の第3突出部Y23の外周に、Oリング62dが配置されている。Oリング62dは、第3突出部Y23の外周と連通孔59の内壁の両方に接触することで、蒸発後冷媒通路51fと低圧冷媒通路51kの間をシールする。
また、第3突出部Y23の内部には、第3連通孔YV3が形成されている。第3連通孔YV3は、低圧導入孔に対応する。第3連通孔YV3は、蒸発後冷媒通路51fよりもマイクロバルブY1側において第3冷媒孔Y18に連通し、蒸発後冷媒通路51fよりも低圧冷媒通路51k側において連通孔59を介して低圧冷媒通路51kに連通する。このように、蒸発後冷媒通路51fを貫通する第3突出部Y23内に第3連通孔YV3が形成されることで、ボディ51の厚み方向の体格を抑えながら、蒸発後冷媒通路51fの冷媒と低圧冷媒通路51kの冷媒とが混合してしまう可能性を低減できる。本実施形態においては、この第3連通孔YV3が、低圧連通流路に相当する。
また、本実施形態においては、変換プレートY8の流路Y83は、一端において第3冷媒孔Y18に連通し、他端において第3連通孔YV3に連通する。これにより、第3連通孔YV3と第3冷媒孔Y18の連通が実現する。したがって、第1冷媒孔Y16、第2冷媒孔Y17、第3冷媒孔Y18と第1連通孔YV1、第2連通孔YV2、第3連通孔YV3の接続関係は、第1実施形態と同じである。
なお、本実施形態のマイクロバルブY1は、第4実施形態と同じマイクロバルブY1であってもよいし、第1実施形態と同じマイクロバルブY1であってもよい。どちらの場合であっても、マイクロバルブY1の可動部Y128は、増幅部(すなわちアームY126、梁Y127)によって増幅された変位が伝達されて冷媒室Y19内で動く。そして、この動きにより、貫通孔Y120に対する第2冷媒孔Y17、第3冷媒孔Y18の開度を調整することができる。
また、本実施形態の圧力伝達部65には、低圧連通流路58bが形成されていない。したがって、本実施形態の圧力室58aは、膨張弁5内においてマイクロバルブY1を介さず高圧冷媒通路51c、低圧冷媒通路51kに連通することはない。
このような構成の冷凍サイクル1の作動について、以下説明する。
[非稼働時]
まず、冷凍サイクルの非稼働時について説明する。この場合、冷凍サイクル1の各装置の作動、非作動および通電、非通電は、第1実施形態と同じである。したがってこの場合、
第3連通孔YV3と第1連通孔YV1とがマイクロバルブY1を介して連通し、第2連通孔YV2とマイクロバルブY1の貫通孔Y120の間が遮断される。
またこのとき、第1実施形態と同様、レシーバ4と膨張弁5の間の冷媒の圧力と、膨張弁5と蒸発器6の間の冷媒の圧力は互いに等しい。したがって、高圧冷媒通路51cにおける冷媒の圧力と低圧冷媒通路51kにおける冷媒の圧力も互いに等しい。また、弁室51gの圧力は低圧冷媒通路51kの圧力と同じになる。したがって、コイルバネ53の弾性力とコイルバネ64の弾性力とのつり合いにより、弁体52は弁座51jに接触し、絞り通路51hが閉じられる。
[稼働時]
次に、冷凍サイクルが稼働している状態について説明する。この場合、圧縮機2、送風機8が作動する。これにより、高圧冷媒通路51cにおける冷媒の圧力が、低圧冷媒通路51kにおける冷媒の圧力よりも高くなる。また、複合センサ54c、ドライバ回路54dも作動する。したがってドライバ回路54dから電気配線Y6、Y7を介してマイクロバルブY1に、必要に応じて通電が行われる。その際、第4実施形態と同様の作動により、ドライバ回路54dは、取得した圧力信号と温度信号に応じて、蒸発器6から流出した低圧冷媒の過熱度が所定の一定値になるよう、電気配線Y6、Y7に印加する電圧のデューティ比を決定する。
例えば、デューティ比が100%の場合、第1実施形態と同様、第2連通孔YV2と第1連通孔YV1とがマイクロバルブY1を介して連通し、第3連通孔YV3とマイクロバルブY1の貫通孔Y120の間が遮断される。したがって、高圧冷媒通路51cにおける高圧冷媒が、連通孔57、第2連通孔YV2、流路Y82、第2冷媒孔Y17を介してマイクロバルブY1内に導入される。そして、当該高圧冷媒が、マイクロバルブY1の第1冷媒孔Y16から、流路Y81、第1連通孔YV1を介して、圧力室58aに印加される。これにより、圧力室58aの圧力が高圧になり、圧力伝達部65を介して弁体52に伝達される力が最大になる。その結果、絞り通路51hの開度およびリフト量が最大の状態になる。
また例えば、デューティ比がゼロより大きく100%より小さい場合、第1実施形態と同様、第2連通孔YV2と第1連通孔YV1とがマイクロバルブY1を介して連通すると共に、第3連通孔YV3と第1連通孔YV1とがマイクロバルブY1を介して連通する。このとき、マイクロバルブY1の第1冷媒孔Y16から圧力室58aに出力される制御圧は、高圧冷媒通路51cの高圧よりも低く、かつ、低圧冷媒通路51kの低圧よりも高くなる。そして、デューティ比が小さくなるほど、第2冷媒孔Y17の開度が小さくなり第3冷媒孔Y18の開度が大きくなる。したがって、マイクロバルブY1の第1冷媒孔Y16から圧力室58aに出力される制御圧は、第2冷媒孔Y17と第3冷媒孔Y18の減圧作用により、デューティ比が小さくなるほど低下する。
これにより、圧力伝達部65を介して弁体52に伝達される力が、最大よりも小さく最小よりも大きい値になる。そして、絞り通路51hの開度およびリフト量は、最小よりも大きくかつ最大よりも小さい範囲で、デューティ比が小さくなるほど小さくなる。なお、デューティ比がゼロより大きく100%より小さい場合、冷媒は、高圧冷媒通路51cから第2連通孔YV2、マイクロバルブY1、第3連通孔YV3をこの順に通って、低圧冷媒通路51kに流れる。ただし、この流れる量は、弁室51gを通って高圧冷媒通路51cから低圧冷媒通路51kに流れる量よりも遙かに少ない。
また例えば、デューティ比がゼロの場合、第1実施形態と同様、第3連通孔YV3と第1連通孔YV1とがマイクロバルブY1を介して連通し、第2連通孔YV2とマイクロバルブY1の貫通孔Y120の間が遮断される。したがって、低圧冷媒通路51kにおける低圧冷媒が、連通孔59、第3連通孔YV3、流路Y83、第3冷媒孔Y18を介してマイクロバルブY1内に導入される。そして、当該低圧冷媒が、マイクロバルブY1の第1冷媒孔Y16から、流路Y81、第1連通孔YV1を介して、圧力室58aに印加される。これにより、圧力室58aの圧力が低圧になり、弁体52は弁座51jに接触し、絞り通路51hが閉じられる。
また、圧連通流路に対応する第3連通孔YV3は、第3冷媒孔Y18から蒸発後冷媒通路51fを越えて低圧冷媒通路51kに連通している。本実施形態では、第4実施形態と同様、ボディ51の外部からコイルバネ53の弾性力の調整のための操作を受け付け可能で蒸発後冷媒通路51fを基準として弁体52と同じ側にある荷重調整部67が設けられている。この荷重調整部67との干渉を避けるように、マイクロバルブY1が蒸発後冷媒通路51fを基準として荷重調整部67、弁体52、低圧冷媒通路51kとは反対側にある。この場合、第3連通孔YV3を、第3冷媒孔Y18から蒸発後冷媒通路51fを越えて低圧冷媒通路51kに連通させることで、マイクロバルブY1と荷重調整部67との干渉を避けつつ、マイクロバルブY1から低圧冷媒通路51kに冷媒を導くことができる。
また、蒸発後冷媒通路51fをマイクロバルブY1の側から低圧冷媒通路51kの側へ貫通する第3突出部Y23の内部に、低圧連通流路である第3連通孔YV3が形成されている。このようになっていることで、蒸発後冷媒通路51fと第3連通孔YV3が交差しても、両者が流路的に絶縁される。そして、蒸発後冷媒通路51f、圧力室58a、圧力伝達部65、弁体52の並び方向に交差して蒸発後冷媒通路51fの延伸方向に交差する厚み方向における膨張弁5の体格を抑制することができる。また、本実施形態において第4実施形態と同様の構成からは、第4実施形態と同様の効果を得ることができる。
(第8実施形態)
次に第8実施形態について、図31、図32を用いて説明する。本実施形態の冷凍サイクル1は、第7実施形態に対して、バルブケーシングY2の構成、変換プレートY8の構成、低圧連通流路の配設形態、およびボディ51の構造が、異なっている。その他の構成は、第7実施形態と同じである。以下、第4実施形態と異なる点を中心に説明する。
本実施形態のバルブケーシングY2は、第7実施形態のバルブケーシングY2に対して、第3突出部Y23の位置および長さが異なっている。具体的には、第3突出部Y23は、図32に示すように、第2突出部Y22に対して膨張弁5の厚み方向に並んで配置されている。また、本実施形態の第3突出部Y23は、第7実施形態に比べて縦方向の長さが短い。また、第3突出部Y23内に形成されている第3連通孔YV3の長さも、第3突出部Y23が短くなったのに合わせて短くなっている。
第3連通孔YV3は、一端が変換プレートY8の流路Y83に連通し、他端が迂回流路58dに連通している。迂回流路58dは、図32に示すように、ボディ51に形成され、一端で第3連通孔YV3に連通し、縦方向に伸びた後、厚み方向に伸びて、他端で低圧冷媒通路51kに連通している。また、ボディ51には、迂回流路58dとボディ51の外部空間との間をシールするシール部材62eが取り付けられている。第3連通孔YV3と迂回流路58dから成る流路が、低圧連通流路に相当する。
この低圧連通流路は、流路Y83から、バルブケーシングY2内およびボディ51内において、蒸発後冷媒通路51fを迂回して低圧冷媒通路51kに連通している。すなわち、低圧連通孔流路は、蒸発後冷媒通路51fに対してボディ51の厚み方向にずれた位置を通ることで、蒸発後冷媒通路を越えて、蒸発後冷媒通路51fよりもマイクロバルブY1側から、蒸発後冷媒通路51fよりも低圧冷媒通路51k側に伸びる。
変換プレートY8において、マイクロバルブY1の第1冷媒孔Y16、第2冷媒孔Y17、第3冷媒孔Y18がそれぞれ第1連通孔YV1、第2連通孔YV2、第3連通孔YV3に連通するよう、流路Y81、Y82、Y83がそれぞれ形成されている。これは、第7実施形態と同様である。なお、本実施形態では、連通孔59は形成されていない。
本実施形態の作動は、第7実施形態と同じである。ただし、第3冷媒孔Y18が開口したときは、第3冷媒孔Y18、第3連通孔YV3、迂回流路58dを介して冷凍サイクル1と低圧冷媒通路51kが連通する。
このように、低圧連通流路は、ボディ51およびバルブケーシングY2において、蒸発後冷媒通路51fの外部に形成されていることで、第3冷媒孔Y18側から蒸発後冷媒通路51fを迂回して蒸発後冷媒通路51f側に連通している。このようになっていることで、厚み方向におけるボディ51の内部等を利用して、第3冷媒孔Y18から出る冷媒を蒸発後冷媒通路51fを越えて低圧冷媒通路51kに導くことができる。なお、本実施形態において第7実施形態と同様の構成からは、第7実施形態と同様の効果を得ることができる。
(第9実施形態)
次に第9実施形態について、図33、図34、図35を用いて説明する。本実施形態は、第8実施形態に対して、第3冷媒孔Y18が連通する位置が、図35に示すように、低圧冷媒通路51kから蒸発後冷媒通路51fに変更されている。
具体的には、第8実施形態の迂回流路58dが廃され、第3連通孔YV3の流路Y83とは反対側の端部が蒸発後冷媒通路51fに連通している。冷凍サイクル1の作動中、低圧冷媒通路51kと蒸発後冷媒通路51fはほぼ同じ圧力なので、本実施形態においても、第8実施形態と同様の作動が実現する。なお、本実施形態において第8実施形態と同様の構成からは、第4実施形態と同様の効果を得ることができる。
(第10実施形態)
次に第10実施形態について、図36を用いて説明する。本実施形態は、第4実施形態に対して、複合センサ54cの配置が異なる。具体的には、複合センサ54cは、バルブモジュールY0と一体に形成されている。
より具体的には、複合センサ54cは、開口51t内において、第1突出部Y21と第2突出部Y22の間に挟まれ、不図示の配線を介して、回路基板54bに実装されたドライバ回路54dに接続されている。
そして、複合センサ54cは、第1突出部Y21および第2突出部Y22の両方に接着等で取り付けられる。これにより、複合センサ54cと第1突出部Y21の間、および、複合センサ54cと第2突出部Y22の間に、ケーシング54aで囲まれた空間と蒸発後冷媒通路51fの間のシールが実現する。
以上のように、複合センサ54cとバルブモジュールY0は、一体としてボディ51に組み付けられている。このようになっていることで、複合センサ54cとマイクロバルブY1が別体としてボディ51に組み付けられている場合に比べ、組み付け作業の手間および組み付けのための部品を低減することができる。実際、上記のような構成においては、複合センサ54cをボディ51に組み付けるための部材が不要になる。また、複合センサ54cを蒸発後冷媒通路51fに露出させるための孔を開口51r以外に設ける必要がない。
なお、第4実施形態に対する本実施形態の変更は、他の実施形態にも同様に適用可能である。また、本実施形態において、適用先の実施形態と同様の構成からは、第4実施形態と同様の効果を得ることができる。
(他の実施形態)
なお、本発明は上記した実施形態に限定されるものではなく、適宜変更が可能である。また、上記各実施形態は、互いに無関係なものではなく、組み合わせが明らかに不可な場合を除き、適宜組み合わせが可能である。また、上記各実施形態において、実施形態を構成する要素は、特に必須であると明示した場合および原理的に明らかに必須であると考えられる場合等を除き、必ずしも必須のものではない。また、上記各実施形態において、実施形態の構成要素の個数、数値、量、範囲等の数値が言及されている場合、特に必須であると明示した場合および原理的に明らかに特定の数に限定される場合等を除き、その特定の数に限定されるものではない。また、上記実施形態において、センサから車両の外部環境情報(例えば車外の湿度)を取得することが記載されている場合、そのセンサを廃し、車両の外部のサーバまたはクラウドからその外部環境情報を受信することも可能である。あるいは、そのセンサを廃し、車両の外部のサーバまたはクラウドからその外部環境情報に関連する関連情報を取得し、取得した関連情報からその外部環境情報を推定することも可能である。特に、ある量について複数個の値が例示されている場合、特に別記した場合および原理的に明らかに不可能な場合を除き、それら複数個の値の間の値を採用することも可能である。また、上記各実施形態において、構成要素等の形状、位置関係等に言及するときは、特に明示した場合および原理的に特定の形状、位置関係等に限定される場合等を除き、その形状、位置関係等に限定されるものではない。また、本発明は、上記各実施形態に対する以下のような変形例および均等範囲の変形例も許容される。なお、以下の変形例は、それぞれ独立に、上記実施形態に適用および不適用を選択できる。すなわち、以下の変形例のうち任意の組み合わせを、上記実施形態に適用することができる。
(変形例1)
上記各実施形態では、複数本の第1リブY123、複数本の第2リブY124、は、通電されることで発熱し、その発熱によって自らの温度が上昇することで膨張する。しかし、これら部材は、温度が変化すると長さが変化する形状記憶材料から構成されていてもよい。
(変形例2)
第5実施形態では、電気配線Y6、Y7からマイクロバルブY1への通電が停止したとき、マイクロバルブY1は低圧冷媒通路51kに連通する。しかし、必ずしもこのようになっておらずともよい。例えば、電気配線Y6、Y7からマイクロバルブY1への通電が停止したとき、マイクロバルブY1は高圧冷媒通路51cに連通してもよい。
(変形例3)
第3実施形態では、ギャップセンサとしてホール素子55が用いられているが、ギャップセンサとしては、渦電流式のセンサが用いられてもよい。この場合、第3実施形態に対して、磁石56が廃され、ホール素子55がコイルに置き換わる。このコイルには、高周波電流が流れる。その結果、このコイルの周囲には、高周波磁界が発生する。この磁界内における金属製の弁体52の位置が変化すると、コイルのインピーダンスが変化する。ドライバ回路54dは、このインピーダンスの変換に基づいて、弁体52のリフト量を算出することができる。
(変形例4)
第3実施形態のホール素子55、磁石56およびそれを用いたドライバ回路54dによる膨張弁5の故障検知の機能については、第2実施形態に適用されてもよい。その場合、ドライバ回路54dは、膨張弁5の故障と、マイクロバルブY1の故障を、共に検出可能となる。そして、報知装置Y56は、膨張弁5の故障と、マイクロバルブY1の故障を、両方とも報知可能となる。
(変形例5)
上記各実施形態では、第2冷媒孔Y17は、第2連通孔YV2、高圧導入路51pを介して高圧冷媒通路51cに連通している。しかし、第2冷媒孔Y17は、高圧冷媒通路51cに連通するのではなく、ボディ51の外部の高圧の流路に連通していてもよい。その場合、第1通路は、高圧冷媒通路51cではなく当該外部の高圧の流路に対応する。当該外部の高圧の流路は、例えば、レシーバ4の冷媒流れ下流かつ膨張弁5の冷媒流れ上流の流路であってもよい。
(変形例6)
上記各実施形態では、第3冷媒孔Y18は、第3連通孔YV3、低圧導入路51qを介して低圧冷媒通路51kに連通している。しかし、第3冷媒孔Y18は、低圧冷媒通路51kに連通するのではなく、ボディ51の外部の低圧の流路に連通していてもよい。その場合、第2通路は、低圧冷媒通路51kではなく当該外部の低圧の流路に対応する。当該外部の低圧の流路は、例えば、膨張弁5の冷媒流れ下流かつ蒸発器6の冷媒流れ上流の流路であってもよい。
(変形例7)
上記各実施形態では、可動部Y128が移動することで、貫通孔Y120に対する第2冷媒孔Y17の開度および貫通孔Y120に対する第3冷媒孔Y18の開度の両方が連動して調整されている。しかし、必ずしもこのようになっておらずともよい。
例えば、可動部Y128が移動することで、貫通孔Y120に対する第2冷媒孔Y17の開度のみが調整され、貫通孔Y120に対する第3冷媒孔Y18の開度は常に一定であってもよい。あるいは例えば、可動部Y128が移動することで、貫通孔Y120に対する第3冷媒孔Y18の開度のみが調整され、貫通孔Y120に対する第2冷媒孔Y17の開度は常に一定であってもよい。これらのようにしても、可動部Y128が移動することで、第1冷媒孔Y16から出力される冷媒圧力が変動する。
(変形例8)
上記各実施形態では、マイクロバルブY1の外部から貫通孔Y120に連通する孔は第1冷媒孔Y16、第2冷媒孔Y17、第3冷媒孔Y18の3つであった。しかし、マイクロバルブY1の外部から貫通孔Y120に連通する冷媒孔は、4つ以上あってもよい。
4番目以降の冷媒孔も、可動部Y128の動きによって開度が調整されてもよいし、調整されなくてもよい。4番目以降の冷媒孔は、第1冷媒孔Y16と同様に背圧室51mに連通していてもよい。また、4番目以降の冷媒孔は、第2冷媒孔Y17と同様に高圧の高圧冷媒通路51cに連通していてもよい。また、4番目以降の冷媒孔は、第3冷媒孔Y18と同様に低圧の低圧冷媒通路51kに連通していてもよい。また、4番目以降の冷媒孔は、上記高圧とも上記低圧とも違う圧力の冷媒が流れる流路であって、背圧室51mでもない流路に連通していてもよい。
(変形例9)
上記実施形態では、膨張弁5は、冷凍サイクルのうち、車室内の空調を行うクーラサイクルに適用されている。しかし、膨張弁5の適用先は、他の用途の冷凍サイクルであってもよい。例えば、車両用のヒートポンプサイクルに流量調整弁として適用されてもよいし、車両用電池冷却器に流量調整弁として適用されてもよい。このような適用例においては、膨張弁5が故障すると走行距離または電池への影響が大きい。したがって、膨張弁5の故障またはマイクロバルブY1の故障を膨張弁5の外部の車載装置に通知することが、有益である。
(変形例10)
上記各実施形態では、弁によって流量を調整する弁装置の一例として膨張弁が挙げられている。しかし、マイクロバルブY1を利用して弁を動かすことで流量を調整する弁装置は、膨張弁に限らず、冷凍サイクルにおける他の流量調整弁であってもよい。
(変形例11)
マイクロバルブY1の形状やサイズは、上記実施形態で示したものに限られない。マイクロバルブY1は、極微小流量制御可能で、かつ、流路内に存在する微小ゴミを詰まらせないような水力直径の第1冷媒孔Y16、第2冷媒孔Y17、第3冷媒孔Y18を有していればよい。
(変形例12)
上記実施形態では、第2連通孔YV2は、第2冷媒孔Y17と高圧冷媒通路51cを連通させている。しかし、第2連通孔YV2を介して第2冷媒孔Y17の連通先は、高圧冷媒通路51cに限らず、低圧冷媒通路51kを流れる冷媒よりも高圧の冷媒が流れる流路であれば、どこでもよい。
(変形例13)
上記第4、5、6、9実施形態では、第1冷媒孔Y16からマイクロバルブY1の外部に制御圧が出力され、第2冷媒孔Y17はマイクロバルブY1の外部の高圧の通路に連通し、第3冷媒孔Y18は実質的に塞がれている。それ以外の実施形態では、第1冷媒孔Y16からマイクロバルブY1の外部に制御圧が出力され、第2冷媒孔Y17はマイクロバルブY1の外部の高圧の通路に連通し、第3冷媒孔Y18はマイクロバルブY1の外部の低圧の通路に連通している。これら以外にも、第1冷媒孔Y16からマイクロバルブY1の外部に制御圧が出力され、第2冷媒孔Y17が実質的に塞がれ、第3冷媒孔Y18がマイクロバルブY1の外部の低圧の通路に連通する例があってもよい。
(変形例14)
上記実施形態では、第2冷媒孔Y17が連通する第1通路の一例として、膨張弁5内部の高圧冷媒通路51cが例示されている。しかし、第2冷媒孔Y17が連通する第1通路は、膨張弁5から流出する低圧の冷媒よりも高圧の冷媒が流れる箇所であれば、膨張弁5の外部にあってもよい。
(変形例15)
上記実施形態における第1連通孔YV1、第2連通孔YV2、第3連通孔YV3は、ボディ51とは別の部品となっているが、ボディ51と一体に形成されていてもよい。
(変形例16)
上記実施形態では、複合センサ54cが検出する物理量は、蒸発後冷媒通路51f内の圧力と温度である。しかし、複合センサ54cが検出する物理量は、蒸発後冷媒通路51f内の圧力のみであってもよいし、蒸発後冷媒通路51f内の温度のみであってもよい。まら、複合センサ54cが検出する物理量は、上記圧力でも上記温度でもない他の物理量であってもよい。
(変形例17)
上記第4~10実施形態では、第2連通孔YV2は蒸発後冷媒通路51f内を貫通する第2突出部Y22内に形成されることで、蒸発後冷媒通路51fのマイクロバルブY1側から圧力室58a側へ蒸発後冷媒通路51fを越えて伸びている。しかし、第2連通孔YV2は、蒸発後冷媒通路51fに対して膨張弁5の厚み方向にずれた位置を通って、蒸発後冷媒通路51fのマイクロバルブY1側から圧力室58a側へ蒸発後冷媒通路51fを越えて伸びていてもよい。
(まとめ)
上記各実施形態の一部または全部で示された第1の観点によれば、冷凍サイクルに用いられる弁装置は、流入口と、流出口と、前記流入口から前記流出口へ流れる冷媒を流通させる弁室と、が形成されたボディと、前記弁室内において変位することで、前記弁室を通じて前記流入口から前記流出口へ流れる冷媒の流量を調整する弁体と、前記弁体を移動させるための制御圧を発生する圧力室作用する圧力を変化させる制御弁部品と、を備え、前記制御弁部品は、冷媒が流通する冷媒室、前記冷媒室に連通すると共に前記圧力室に連通する第1冷媒孔、前記冷媒室に連通すると共に当該制御弁部品の外の冷媒の通路に連通する第2冷媒孔が、形成される基部と、自らの温度が変化すると変位する駆動部と、前記駆動部の温度の変化による変位を増幅する増幅部と、前記増幅部によって増幅された変位が伝達されて前記冷媒室内で動くことで、前記冷媒室に対する前記第2冷媒孔の開度を調整する可動部と、を有し、前記駆動部が温度の変化によって変位したときに、前記駆動部が付勢位置において前記増幅部を付勢することで、前記増幅部がヒンジを支点として変位するとともに、前記増幅部と前記可動部の接続位置で前記増幅部が前記可動部を付勢し、前記ヒンジから前記付勢位置までの距離よりも、前記ヒンジから前記接続位置までの距離の方が長い。
また、第2の観点によれば、前記圧力室は、前記弁室であり、前記第2冷媒孔が連通する前記通路は、高圧の冷媒が流れる第1通路であり、前記基部には、前記高圧よりも低い低圧が流れる第2通路に連通すると共に前記冷媒室に連通する第3冷媒孔が形成され、前記可動部は、前記増幅部によって増幅された変位が伝達されて前記冷媒室内で動くことで、前記冷媒室に対する前記第2冷媒孔の開度および前記冷媒室に対する前記第3冷媒孔の開度のうち少なくとも一方を調整する。これにより、制御圧が出力される流路を経ずに弁部品が低圧に連通する。
また、第3の観点によれば、前記基部は、板形状の第1外層と、板形状の第2外層と、前記第1外層と前記第2外層に挟まれて固定される固定部とを有し、前記第2外層に、前記第1冷媒孔、前記第2冷媒孔、および前記第3冷媒孔が形成されている。このようになっていることで、制御弁部品における流路がUターン構造を有する。
また、第4の観点によれば、前記第1外層よりも前記第2外層の方が前記弁体に近い側に配置され、前記第1通路および前記第2通路は、前記ボディに形成されている。このようになっていることで、第2外層よりも第1外層の方が弁体に近い側に配置される場合に比べ、制御弁部品からボディへ冷媒を流す流路を短くすることができる。ひいては、弁装置を小型化することができる。
また、第5の観点によれば、前記第1外層に、前記駆動部の温度を変化させるための電気配線を通す孔が形成されている。このように、制御弁部品の流路はUターン構造を有し、更に、第1冷媒孔側とは反対側の第1外層に電気配線を通す孔が形成されている。しかも、第1外層よりも第2外層の方が弁体に近い。したがって、第1冷媒孔側にある冷媒の流路等と比べて大気雰囲気により近い側に電気配線を置くことができる。したがって、電気配線への冷媒雰囲気の影響を低減するためのハーメチック等のシール構造の必要性が低下する。
また、第6の観点によれば、前記可動部は、前記冷媒室に対して前記第2冷媒孔が全閉されると共に前記第3冷媒孔が全開される第1位置と、前記冷媒室に対して前記第2冷媒孔が全開されると共に前記第3冷媒孔が全閉される第2位置と、前記冷媒室に対して前記第2冷媒孔が全閉と全開の間の中間開度で開くと共に前記冷媒室に対して前記第3冷媒孔が全閉と全開の間の中間開度で開く中間位置と、に制御される。
このようになっていることで、第2冷媒孔から導入される高圧と第3冷媒孔から導入される低圧までの広い範囲で、第1冷媒孔から出力される冷媒圧力を調整することができる。
また、第7の観点によれば、当該弁装置は、前記冷凍サイクルにおいて蒸発器の冷媒流れ上流側で冷媒を減圧膨張させる膨張弁であり、前記ボディに固定される自律部を備え、前記自律部は、前記蒸発器から流出した冷媒の温度および圧力を検出する複合センサと、前記複合センサが検出した温度および圧力に応じて前記駆動部の温度を制御するドライバ回路と、を有する。このようになっていることで、弁装置は、自律的に流量を調整できる。
また、第8の観点によれば、弁装置は、前記ボディに固定されて前記弁体のリフト量を検出するギャップセンサを備える。このようなギャップセンサを有することで、弁装置の故障の有無を判別するための情報が取得可能となる。
また、第9の観点によれば、前記制御弁部品は、当該制御弁部品が正常に作動しているか故障しているかを判別するための信号を出力する故障検知部を備えている。制御弁部品がこのような信号を出力することで、制御弁部品の故障の有無を容易に判別できる。
また、第10の観点によれば、前記信号は、前記増幅部の歪み量に応じた信号である。このようになっていることで、この信号と制御弁部品を制御するための制御量との関係に基づいて、弁装置の故障の有無を判別することができる。
また、第11の観点によれば、前記駆動部は、通電されることで発熱し、前記故障検知部は、前記制御弁部品が故障している場合に前記制御弁部品に対する通電を停止する装置に、前記信号を出力する。このように、制御弁部品の故障時に通電を停止することで、故障時の安全性を高めることができる。
また、第12の観点によれば、当該弁装置は、人に報知を行う報知装置を制御する制御装置に通知可能な回路を備え、前記回路は、前記故障検知部から前記信号を受け、前記信号に基づいて前記制御弁部品が正常に作動しているか故障しているかを判定し、故障していると判定したことに基づいて、前記制御弁部品が故障していることを前記報知装置に報知させるため、前記制御装置に通知を行う。これにより、人は、制御弁部品の故障を知ることができる。
また、第13の観点によれば、前記制御弁部品は半導体チップによって構成されている。したがって、制御弁部品を小型に構成できる。
また、第14の観点によれば、当該弁装置は、冷媒を減圧させる膨張弁であり、前記第2冷媒孔が連通する前記通路は、前記膨張弁によって減圧される前の高圧の冷媒が流れる第1通路であり、前記流入口には、前記冷凍サイクルにおいて冷媒を凝縮させる凝縮器によって凝縮された冷媒が流入し、前記流入口から流入した冷媒が前記弁体と弁座の間に形成される絞り通路を通ることで前記高圧の冷媒よりも低圧に減圧され、前記絞り通路を通って減圧された冷媒は第2通路を通ってその後に前記流出口からから流出し、前記流出口は、前記冷凍サイクルにおいて冷媒を蒸発させる蒸発器の入口側に連通し、前記冷媒室の冷媒を第2通路に導く低圧連通流路が設けられている。
このように、低圧連通流路が冷媒室の冷媒を第2通路に導くことで、第2通路に導かれた冷媒は蒸発器に流入する。したがって、冷媒室から低圧側に導かれた冷媒が蒸発器に流入しない場合に比べて、熱交換に寄与しない冷媒を低減することができる。ひいては、冷媒を無駄に使用する可能性が低減され、冷凍サイクルの効率が向上する。
また、第15の観点によれば、前記第1冷媒孔は、前記第2通路の低圧よりも高い制御圧を前記圧力室に出力し、前記低圧連通流路は、前記第1冷媒孔から流出した冷媒を前記第2通路に導くよう形成されており、前記低圧連通流路には、前記低圧連通流路に沿って流路断面積が低下する絞り部が設けられている。
このように、低圧連通流路が第1冷媒孔から流出した冷媒を第2通路に導くように構成されていることで、制御弁部品に第1冷媒孔とも第2冷媒孔とも異なる冷媒孔を設けて低圧連通流路に連通させる必要がなくなる。また、このような構成において低圧連通流路に絞り部が形成されていることで、絞り部の前後で圧力差を生じさせることができるので、制御圧を出力するという第1冷媒孔の機能が損ねられる可能性が低減される。
また、第16の観点によれば、前記圧力室に発生した前記制御圧を受けて前記制御圧に応じた力を前記弁体に伝達する移動可能な圧力伝達部を備え、前記圧力伝達部は、前記圧力室から前記第2通路を通って前記弁体まで伸び、前記低圧連通流路は、前記圧力伝達部の内部に形成されて前記圧力室から前記第2通路まで連通する。このように、圧力伝達部が圧力室の制御圧を受けると共に第2通路を通ることを利用し、圧力室から第2通路まで連通する低圧連通流路を形成することで、低圧連通流路のためだけの部材を設ける必要がなくなる。
また、第17の観点によれば、前記圧力室に発生した前記制御圧を受けて前記制御圧に応じた力を前記弁体に伝達する移動可能な圧力伝達部を備え、前記ボディには、前記圧力伝達部を収容する収容孔が形成され、前記収容孔は前記圧力室を含むと共に前記第2通路に連通し、前記圧力伝達部は、前記収容孔および前記第2通路を通って前記弁体まで伸び、前記低圧連通流路は、前記収容孔の内周面と前記圧力伝達部との間の隙間として設けられる。
このように、収容孔は圧力室を含むと共に第2通路に連通すること、圧力伝達部が圧力室の制御圧を受けると共に第2通路を通ることを利用し、収容孔の内周面と圧力伝達部の外周面との間の隙間に低圧連通流路を設けることができる。このようにすることで、低圧連通流路のためだけの部材を設ける必要がなくなる。
また、第18の観点によれば、前記第2冷媒孔が連通する前記通路は、高圧の冷媒が流れる第1通路であり、前記基部には、前記低圧連通流路を介して前記高圧よりも低い低圧が流れる前記第2通路に連通すると共に前記冷媒室に連通する第3冷媒孔が形成され、前記可動部は、前記増幅部によって増幅された変位が伝達されて前記冷媒室内で動くことで、前記冷媒室に対する前記第2冷媒孔の開度および前記冷媒室に対する前記第3冷媒孔の開度のうち少なくとも一方を調整する。
このようにすることで、第3冷媒孔を有して開度調整により制御圧を調整可能な制御弁部品において、冷媒を無駄に使用する可能性が低減され、冷凍サイクルの効率が向上する。
また、第19の観点によれば、前記流入口は第1流入口であり、前記流出口は第1流出口であり、前記冷凍サイクルは前記蒸発器で蒸発した冷媒を圧縮する圧縮機を含み、前記ボディには、前記蒸発器から流出した低圧冷媒を流入させる第2流入口と、冷媒を前記圧縮機の吸入側へ流出させる第2流出口と、前記第2流入口から前記第2流出口へ至る通路である蒸発後冷媒通路と、が形成され、当該弁装置は、前記圧力室における冷媒の圧力に応じた力を前記弁体に伝達する移動可能な圧力伝達部と、前記圧力伝達部とは反対側から弾性力で前記弁体を付勢する弾性体と、前記弾性体の弾性力を調整する調整部と、を備え、前記ボディにおいて、前記蒸発後冷媒通路、前記圧力室、前記圧力伝達部、前記弁体、前記弾性体、前記調整部が、この順に並んで配置され、前記第2通路は、前記蒸発後冷媒通路に対して前記弁体の側に配置され、前記調整部には、前記弁体とは反対側において前記ボディの外部に露出する操作受付部が形成され、前記操作受付部は、前記ボディの外部から前記弾性体の弾性力の調整のための操作を受け付けることができ、前記低圧連通流路は、前記第3冷媒孔から前記蒸発後冷媒通路を越えて前記第2通路に連通している。
このように、ボディの外部から弾性体の弾性力の調整のための操作を受け付け可能で蒸発後冷媒通路を基準として弁体と同じ側にある調整部との干渉を避けるように、制御弁部品が蒸発後冷媒通路を基準として調整部、弁体、第2通路とは反対側にある。このような場合には、低圧連通流路を、第3冷媒孔から蒸発後冷媒通路を越えて第2通路に連通させることで、制御弁部品と調整部との干渉を避けつつ、制御弁部品から第2通路に冷媒を導くことができる。
また、第20の観点によれば、前記蒸発後冷媒通路を前記制御弁部品の側から前記第2通路の側へ貫通する低圧パイプを備え、前記低圧連通流路は、前記低圧パイプの内部に形成されている。このようになっていることで、前記蒸発後冷媒通路と低圧連通流路が交差しても、両者が流路的に絶縁される。そして、蒸発後冷媒通路、圧力室、圧力伝達部、弁体の並び方向に交差して蒸発後冷媒通路の延伸方向に交差する方向における弁装置の体格を抑制することができる。
また、第21の観点によれば、前記低圧連通流路は、前記ボディにおいて、前記蒸発後冷媒通路の外部に形成されていることで、前記第3冷媒孔から前記蒸発後冷媒通路を迂回して前記第2通路に連通している。このようになっていることで、蒸発後冷媒通路、圧力室、圧力伝達部、弁体の並び方向に交差して蒸発後冷媒通路の延伸方向に交差する方向におけるボディの内部を利用して、第3冷媒孔から出る冷媒を蒸発後冷媒通路を越えて第2通路に導くことができる。
また、第22の観点によれば、前記冷凍サイクルは前記冷凍サイクルにおいて冷媒を蒸発させる蒸発器で蒸発した冷媒を圧縮する圧縮機を含み、当該弁装置は、冷媒を減圧させる膨張弁であり、前記流入口は第1流入口であり、前記流出口は第1流出口であり、前記第2冷媒孔が連通する前記通路は、前記膨張弁によって減圧される前の高圧の冷媒が流れる第1通路であり、前記第1流入口には、前記冷凍サイクルにおいて冷媒を凝縮させる凝縮器によって凝縮された冷媒が流入し、前記第1流入口から流入した冷媒が前記弁体と弁座の間に形成される絞り通路を通ることで前記高圧の冷媒よりも低圧に減圧され、前記絞り通路を通って減圧された冷媒は第2通路を通ってその後に前記第1流出口からから流出し、前記第1流出口は、前記蒸発器の入口側に連通し、前記ボディには、前記蒸発器から流出した低圧冷媒を流入させる第2流入口と、冷媒を前記圧縮機の吸入側へ流出させる第2流出口と、前記第2流入口から前記第2流出口へ至る通路である蒸発後冷媒通路と、が形成され、当該弁装置は、前記蒸発後冷媒通路を通る冷媒に関する物理量に応じた信号を出力するセンサと、前記センサが出力した前記信号に基づいて、前記制御弁部品の作動を制御するドライバ回路とを備え、前記センサ、前記制御弁部品および前記ドライバ回路は、前記蒸発後冷媒通路を基準として前記弁体とは反対側に配置される。このようになっていることで、センサ、制御弁部品およびドライバ回路間の電気的配線の配策が容易になる。
また、第23の観点によれば、前記ボディにおいて、前記制御弁部品、前記蒸発後冷媒通路、前記圧力室が、この順に並んで配置され、当該弁装置は、前記蒸発後冷媒通路を前記制御弁部品の側から前記圧力室の側へ貫通する制御圧パイプと、前記圧力室における冷媒の圧力に応じた力を前記弁体に伝達する移動可能な圧力伝達部と、を備え、前記制御圧パイプには、前記蒸発後冷媒通路よりも前記制御弁部品の側において前記第1冷媒孔に連通し、前記蒸発後冷媒通路よりも前記圧力室側において前記圧力室に連通する制御圧導入孔が形成される。
このような構成により、蒸発後冷媒通路を貫通する制御圧パイプに形成された制御圧導入孔を介して、制御弁部品から制御圧を及ぼすことができる。したがって、制御弁部品の機能も維持しつつ、センサ、制御弁部品およびドライバ回路間の電気的配線の取り回しが容易になる。そして、制御弁部品、蒸発後冷媒通路、圧力室の並び方向に交差して蒸発後冷媒通路の延伸方向に交差する方向における弁装置の体格を抑制することができる。
また、第24の観点によれば、前記センサと前記制御弁部品は、一体として前記ボディに組み付けられている。このようになっていることで、センサと制御弁部品が別体としてボディに組み付けられている場合に比べ、組み付け作業の手間および組み付けのための部品を低減することができる。