JP6905162B2 - ロボットアームを外科用テーブルに取り付けるためのカプラ - Google Patents
ロボットアームを外科用テーブルに取り付けるためのカプラ Download PDFInfo
- Publication number
- JP6905162B2 JP6905162B2 JP2019551299A JP2019551299A JP6905162B2 JP 6905162 B2 JP6905162 B2 JP 6905162B2 JP 2019551299 A JP2019551299 A JP 2019551299A JP 2019551299 A JP2019551299 A JP 2019551299A JP 6905162 B2 JP6905162 B2 JP 6905162B2
- Authority
- JP
- Japan
- Prior art keywords
- coupler
- post
- cam
- axis
- collet
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000007246 mechanism Effects 0.000 claims description 57
- 238000013519 translation Methods 0.000 claims description 28
- 230000033001 locomotion Effects 0.000 claims description 21
- 230000006835 compression Effects 0.000 claims description 11
- 238000007906 compression Methods 0.000 claims description 11
- 238000000034 method Methods 0.000 description 27
- 230000014616 translation Effects 0.000 description 24
- 238000010586 diagram Methods 0.000 description 14
- 230000013011 mating Effects 0.000 description 13
- 230000008878 coupling Effects 0.000 description 12
- 238000010168 coupling process Methods 0.000 description 12
- 238000005859 coupling reaction Methods 0.000 description 12
- 239000000463 material Substances 0.000 description 12
- 238000001356 surgical procedure Methods 0.000 description 10
- 230000008901 benefit Effects 0.000 description 4
- 210000000078 claw Anatomy 0.000 description 4
- 230000008859 change Effects 0.000 description 3
- 238000003825 pressing Methods 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000003068 static effect Effects 0.000 description 2
- 230000001225 therapeutic effect Effects 0.000 description 2
- 230000005355 Hall effect Effects 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 230000000994 depressogenic effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 230000014759 maintenance of location Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 239000011435 rock Substances 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
- 230000003746 surface roughness Effects 0.000 description 1
- 238000012549 training Methods 0.000 description 1
- 230000001131 transforming effect Effects 0.000 description 1
Images





























































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Master-slave robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16B—DEVICES FOR FASTENING OR SECURING CONSTRUCTIONAL ELEMENTS OR MACHINE PARTS TOGETHER, e.g. NAILS, BOLTS, CIRCLIPS, CLAMPS, CLIPS OR WEDGES; JOINTS OR JOINTING
- F16B21/00—Means for preventing relative axial movement of a pin, spigot, shaft or the like and a member surrounding it; Stud-and-socket releasable fastenings
- F16B21/10—Means for preventing relative axial movement of a pin, spigot, shaft or the like and a member surrounding it; Stud-and-socket releasable fastenings by separate parts
- F16B21/16—Means for preventing relative axial movement of a pin, spigot, shaft or the like and a member surrounding it; Stud-and-socket releasable fastenings by separate parts with grooves or notches in the pin or shaft
- F16B21/165—Means for preventing relative axial movement of a pin, spigot, shaft or the like and a member surrounding it; Stud-and-socket releasable fastenings by separate parts with grooves or notches in the pin or shaft with balls or rollers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/50—Supports for surgical instruments, e.g. articulated arms
- A61B90/57—Accessory clamps
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J18/00—Arms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J3/00—Manipulators of master-slave type, i.e. both controlling unit and controlled unit perform corresponding spatial movements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/0009—Constructional details, e.g. manipulator supports, bases
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/0096—Programme-controlled manipulators co-operating with a working support, e.g. work-table
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00477—Coupling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/50—Supports for surgical instruments, e.g. articulated arms
- A61B90/57—Accessory clamps
- A61B2090/571—Accessory clamps for clamping a support arm to a bed or other supports
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2560/00—Constructional details of operational features of apparatus; Accessories for medical measuring apparatus
- A61B2560/04—Constructional details of apparatus
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16B—DEVICES FOR FASTENING OR SECURING CONSTRUCTIONAL ELEMENTS OR MACHINE PARTS TOGETHER, e.g. NAILS, BOLTS, CIRCLIPS, CLAMPS, CLIPS OR WEDGES; JOINTS OR JOINTING
- F16B2/00—Friction-grip releasable fastenings
- F16B2/02—Clamps, i.e. with gripping action effected by positive means other than the inherent resistance to deformation of the material of the fastening
- F16B2/16—Clamps, i.e. with gripping action effected by positive means other than the inherent resistance to deformation of the material of the fastening using rollers or balls
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Public Health (AREA)
- Biomedical Technology (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Heart & Thoracic Surgery (AREA)
- Veterinary Medicine (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- General Engineering & Computer Science (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Pathology (AREA)
- Manipulator (AREA)
- Accommodation For Nursing Or Treatment Tables (AREA)
Description
本出願は、2017年3月26日に出願された、参照により本明細書に組み込まれる、同時係属中の米国特許仮出願第62/476,816号の非仮出願である。
ロボットアームを外科用テーブルに連結するための装置及び方法。他の実施形態も本明細書に記載される。
本明細書に開示された実施形態は、添付図面の図に例として図示されているのであって、限定として図示されているのではなく、また添付図面では同様の参照符号が類似の要素を示す。なお、本開示における「一(an)」又は「1つの(one)」実施形態への言及は、必ずしも同じ実施形態ではなく、それらは少なくとも1つの実施形態を意味するものとする。
図1A〜図1Bに概略的に示すように、外科用テーブル100は、テーブルトップ120、テーブル支持体122、及びテーブル基部124を含む。図1Aに概略的に示すように、テーブルトップ120は、患者Pが外科手技中に配置され得る上面を有する。テーブルトップ120は、例えば、床面の上方の好適な高さで基台となり得る支持体122上に配置される。支持体122(また、本明細書では基台とも称される)は、Z軸(床の上方の高さ)、Y軸(テーブルの長手方向軸に沿う)、及び/若しくはX軸(テーブルの横方向軸に沿う)における並進、並びに/又はZ、Y、及び/若しくはX軸の周りの回転などの、所望の数の自由度で、テーブルトップ120の移動を提供し得る。テーブルトップ120はまた、任意の好適な軸に沿って/その周りに互いに対して移動可能である複数の区分、例えば、胴体、一方又は両方の脚部、及び/又は一方若しくは両方の腕、並びに頭部支持区分の各々に対して別個の区分を含んでもよい。テーブルトップ120及び/又はその構成区分の移動は、手動で実行され、モータによって駆動され、遠隔で制御され、又は任意の他の好適な手段を介してもよい。テーブルトップ用の支持体122は、基部124に装着されてもよく、基部124は、手術室の床面に固定することができ、又は、例えば、基部124上の車輪の使用によって床面に対して移動可能となり得る。いくつかの実施形態において、支持体122の高さは、例えば、テーブルトップ120の運動(例えば、軸方向(縦方向)又は横方向運動)と共に調節することができ、テーブルトップ120が、床面の上方のある高さ(例えば、外科医のアクセスを可能にするための)及び支持体120からのある距離で、所望の外科用部位において位置決めされることを可能とすることができる。これはまた、テーブル100に連結されたロボットアーム(例えば、下記で考察されるアーム130)が、テーブルトップ120上に配置された患者P上の所望の治療目標に到達することを可能にし得る。
図3に概略的に示すように、カプラ310が、ロボットアーム320を外科用テーブル300に連結するために提供されてもよい。本明細書に記載されたようなカプラ310は、外科用テーブル及びロボットアーム(例えば、外科用テーブル100、200、ロボットアーム130、230)、及び本明細書に記載の方法のいずれかと共に使用可能である。カプラ310は、ロボットアームのための端子基部部分Aなどの第1の部分312(例えば、アームアダプタ)を含むことができる。カプラ310は、外科用テーブル300に装着するための基部部分Bなどの第2の部分314を含むことができる。ロボットアーム320は、第1の部分312に連結することができ、第1の部分312を第2の部分314に連結する前に、テーブルトップ302を第2の部分314に連結することができる。ロボットアーム320を外科用テーブル300に連結することにより、テーブル300に連結されたロボットアームがテーブルトップ302上に配置された患者に対する所望の治療目標に到達することを可能にすることができる。第1の部分312及び第2の部分314は、電力及びデータコネクタを更に含んでもよい。第1の部分312及び第2の部分314は、第1の部分312がテーブル300に連結し、かつ第2の部分314がロボットアーム320に連結するように入れ替わってもよいことは認識されるはずである。
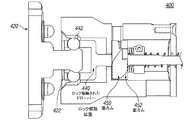
図4Aは、第1の部分410及び第2の部分420を含むカプラ400の一実施形態の側面図である。第1の部分410と第2の部分420との連結は、6自由度が制約される強固な嵌合接続を形成する。例えば、強固な嵌合接続は、第2の部分420に対する第1の部分410の、Z軸、Y軸、及び/若しくはX軸における並進、並びに/又はZ軸、Y軸、及び/若しくはX軸の周りの回転をy軸制約する。第1の部分410は、第1の部分410と第2の部分420との間の連結をロック及び固定するように構成されたハンドル454と、本明細書に記載されるような、対応する運動学的取り付け部430に接触するように構成されたV溝432のセットと、を含む。第2の部分420は、第1の部分410と嵌合するようにY軸に沿って並進させ得るポスト422(例えば、ロックポスト)を含む。ポスト422を第1の部分410に連結することにより、Y軸に沿った並進を制約してもよい。図4Bは、カプラ400に対するX軸、Y軸、及びZ軸を示す図である。
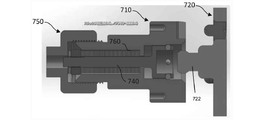
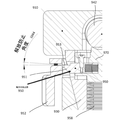
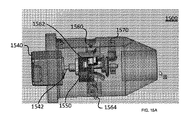
図8は、外部負荷(例えば、外科手技中のロボットアーム静的負荷及び慣性負荷)の存在下でさえも、連結が6自由度で制約及び維持されることを確保するために高い力を発生させ得る電動式ロック機構によって駆動されるカプラ800の一実施形態の断面側面図である。カプラ800は、第1の部分810及び第2の部分820を含んでもよい。第1の部分810と第2の部分820との連結は、6自由度が制約される強固な嵌合接続を形成する。この図から、第1の部分810は、第1の端部856(ロボットアームに連結された端部)及び第2の端部858(第2の部分820に連結された端部)と、第1の端部と第2の端部との間の第1の部分810内に形成された内部空洞864と、を含むことが分かる。内部空洞864への開口部は、第2の端部858を通って形成される。第1の部分810は、第1の部分810と第2の部分820との間の連結をロック及び固定するように構成された駆動機構に連結されたロック機構を含んでもよい。第2の部分は、第1の部分810と嵌合するようにY軸に沿って並進させてY軸に沿った並進を制約し得るポスト822を含む。ポスト822は、回転可能なコレット830の対応するねじ付き部分832に連結され得る主ねじ824を含む。モータ850は、コレット830を主ねじ824の周りに第1の方向に回転するように駆動して、それにより、主ねじ824をY軸に沿って第1の部分810内に並進させてもよい。このようにして、コレット830をポスト822と係合させて、第1の部分810を第2の部分820に強固にロック及び連結してもよい。コレット830を第1の方向とは反対の第2の方向に回転させることにより、主ねじ824をY軸に沿って第1の部分810から外に並進させてもよい。いくつかの実施形態では、主ねじ824のピッチ角は、約2度〜約30度であってもよい。いくつかの実施形態では、主ねじ824のピッチ角は、約10度〜約15度であってもよい。いくつかの実施形態では、主ねじ824のピッチ角は、主ねじ824が後退駆動されるのを防止するように構成されてもよい。
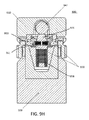
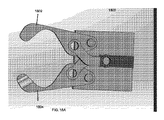
図9Aは、カプラ900の一実施形態の斜視側面図である。カプラ900は、外科用テーブル(例えば、外科用テーブル300)に装着するための基部部分などの第1の部分910を含むことができる。カプラ900は、ロボットアームのための端子基部部分などの第2の部分920(例えば、アームアダプタ)を含むことができる。第1の部分910と第2の部分920との連結は、6自由度が制約される強固な嵌合接続を形成する。第1の部分910は、本明細書に記載されるように、第1の部分910と第2の部分920との間の連結をロック及び固定するように構成されたハンドル940と、対応する位置整合穴(図示せず)と接触するように構成された位置整合突出部960と、を含む。第1の部分910は、第2の部分920の円錐受容穴912(図9D)と嵌合するようにY軸に沿って並進させてY軸に沿った並進を制約し得る円錐930を含む。図9Bは、カプラ900に対するX軸、Y軸、及びZ軸を示す図である。第1の部分910及び第2の部分920は、第1の部分910が外科用テーブルに連結し、かつ第2の部分920がロボットアームに連結するように、入れ替わってもよいことは認識されるはずである。
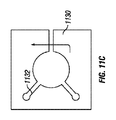
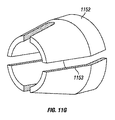
図11A、図11E、及び図11Hは、第1の部分1110及び第2の部分1120を含むカプラ1100の実施形態の断面側面図である。第1の部分1110と第2の部分1120との連結は、6自由度が制約される強固な嵌合接続を形成する。第1の部分及び第2の部分は各々、カプラ1100を介して電力及びデータを提供するための電気インターフェース1126を含んでもよい。第1の部分1110は、第1の部分1110を第2の部分1120に連結するように構成されたばね1114に連結されたボールベアリング1112を含む。いくつかの実施形態では、スプリングバックを防止するために、能動ロックがばね1114に更に連結されてもよい。第2の部分1120は、第1の部分1110と嵌合するようにY軸に沿って並進させ得るポスト1122を含む。第2の部分1120は、第1の表面1123及び第2の表面1124を含んでもよい。第2の表面1124は、第1の表面1123に対してより急な角度を有してもよい。半径方向クランプ1130は、第2の部分1120の周囲に配置されてもよい。ポスト1122を第1の部分1110に連結することにより、Y軸に沿った並進を制約してもよい。
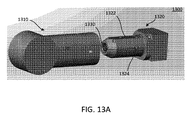
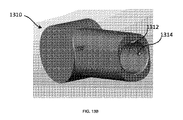
図13A〜図13Dは、第1の部分1310及び第2の部分1320を含むカプラ1300の実施形態の斜視図である。第1の部分1310と第2の部分1320との連結は、6自由度が制約される強固な嵌合接続を形成する。第1の部分及び第2の部分は各々、カプラ1300を介して電力及びデータを提供するための電気インターフェースを含んでもよい。ポスト穴1312は、図13A〜図13Cに示される第2の電気コネクタ1330に連結するように構成された、図13Cに示される第1の電気コネクタ1316を含んでもよい。
Claims (20)
- ロボットアームを外科用テーブルに連結するためのカプラであって、
外科用テーブルに連結するように構成された第1の部分と、
ロボットアームに連結するように構成された第2の部分であって、前記第2の部分が、前記第1の部分の第1の軸に沿って並進して前記第2の部分を前記第1の部分に連結するように構成されたポストを有する、第2の部分と、
前記第1の部分と前記第2の部分との間の連結をロック位置とロック解除位置との間で移行させるように構成されたロック機構であって、前記ロック機構が、前記第1の部分に連結され、前記第1の部分の内部空洞内に、前記ポストに係合するように前記内部空洞に対して動く係合部材を含み、前記ロック位置において、前記第2の部分に対する前記第1の部分の6自由度での移動が制約される、ロック機構と、を含む、カプラ。 - 前記係合部材が、前記ポストに係合するように前記第1の軸に沿って前記内部空洞内で並進するホルダであり、前記ロック機構が、前記ホルダに連結されたボールベアリングアセンブリと、前記第1の部分の前記内部空洞内に位置付けられた、第1のカムと、第2のカムと、をさらに含み、前記第1の軸に沿った前記第1のカム及び前記第2のカムの並進が前記ホルダに、前記第1の軸に沿って前記ポストを前記ロック位置又は前記ロック解除位置へと並進させる、請求項1に記載のカプラ。
- 前記ホルダが、前記ポストを受容するように寸法決めされた受容空洞を含み、前記第1の部分の前記内部空洞が内部接触表面を含み、前記ポストが外部接触表面を含み、前記ボールベアリングアセンブリのボールが前記ロック位置において前記内部接触表面及び前記外部接触表面に接触する、請求項2に記載のカプラ。
- 前記第1のカム及び前記第2のカムの各々が、前記ロック機構の並進機能又は軸方向力機能を調節するように構成された可変カム表面プロファイルを有する面カムである、請求項2に記載のカプラ。
- 前記ロック機構が、前記ボールベアリングアセンブリに付勢力を加えるように構成された付勢部材を更に含む、請求項2に記載のカプラ。
- 前記第1の部分が、外面に沿って軸方向に配向された溝を含み、前記第2の部分は、前記第2の部分が前記第1の部分に連結されたときに前記溝と嵌合するように構成された運動学的取り付け部を含み、前記運動学的取り付け部及び前記溝が、前記第2の部分に対する前記第1の部分の並進又は回転を制約するように寸法決めされている、請求項1に記載のカプラ。
- 前記第1の部分が位置整合開口部を更に含み、前記第2の部分が位置整合突出部を含み、前記位置整合突出部が、前記位置整合開口部と単一の向きで嵌合し、かつ前記第2の部分に対する前記第1の部分の位置不整合を防止するように構成された非対称形状を有する、請求項1に記載のカプラ。
- 前記第2の部分の前記ポストが、前記第1の部分を取り囲んで前記第1の軸に沿った前記第2の部分に対する前記第1の部分の並進を制約するように寸法決めされている、請求項1に記載のカプラ。
- 前記係合部材が、シャフトであり、前記ロック機構が、ボールベアリングのセットと、ブッシングに連結されたカムと、をさらに備え、前記カム及び前記ブッシングが、前記シャフトに沿って並進して前記ロック位置と前記ロック解除位置との間の前記ポストに対する前記ボールベアリングのセットの接触力を変化させるように構成されている、請求項1に記載のカプラ。
- 前記内部空洞が、テーパ部分を備え、前記ポストが、前記第1の部分の前記内部空洞の前記テーパ部分と嵌合して前記第2の部分を前記第1の部分に連結するように構成された円錐であり、前記円錐が、前記第1の部分と前記第2の部分との間の連結の高い剛性を維持しながら低い解放力を達成するように構成されたテーパ角を有する、請求項1に記載のカプラ。
- 前記円錐のノーズに配置されたピンを更に含み、前記ピンが、第1の構成で前記円錐の前記ノーズから突出するように構成され、第2の構成で前記ノーズ内に後退し、前記第1の構成又は前記第2の構成が、前記ロック機構のハンドルの向きに対応する、請求項10に記載のカプラ。
- 前記円錐の側面に沿って配置された係止部であって、前記係止部が、第1の構成で前記円錐の前記側面から突出するように付勢され、第2の構成で前記円錐の前記側面の中に後退する、係止部と、を更に含み、
前記係合部材が、前記係止部を前記第1の構成と前記第2の構成との間で移行させるように前記係止部と係合するスイッチである、請求項10に記載のカプラ。 - 前記第1の部分と前記第2の部分との間に電気的インターフェースを更に含み、前記電気的インターフェースが、前記ロック機構を駆動するためにモータに電力を供給するように動作可能である、請求項1に記載のカプラ。
- ロボットアームを外科用テーブルに連結するためのカプラであって、
外科用テーブルに連結するように構成された第1の端部と、第2の端部と、を有する第1の部分であって、前記第2の端部が、前記第1の部分内の内部空洞への開口部を画定する、第1の部分と、
ロボットアームに連結するように構成された第2の部分であって、前記第2の部分が、前記内部空洞内に受容され、かつ前記第1の部分の第1の軸に沿って並進して前記第2の部分を前記第1の部分に連結するように構成されたポストを有する、第2の部分と、
前記第2の部分に対する前記第1の部分の6自由度での移動を制約するように構成されたコレットまたは半径方向圧縮部材を含むロック機構と、
前記ロック機構の動作を駆動するように構成された駆動機構と、を含む、カプラ。 - 前記ロック機構が、前記第1の部分の前記内部空洞内に回転可能に位置付けられたコレットを含み、前記第2の部分の前記ポストが、前記コレット内に受容されるように構成された主ねじを含み、前記第1の軸の周囲の第1の方向での前記コレットの回転が、前記主ねじを前記コレットに向かう方向に前記第1の軸に沿って並進させて前記第1の部分を前記第2の部分にロックし、前記第1の軸の周囲の第2の方向での前記コレットの回転が、前記主ねじを前記コレットから遠ざかる方向に前記第1の軸に沿って並進させて前記第1の部分を前記第2の部分からロック解除する、請求項14に記載のカプラ。
- 前記第1の部分と前記第2の部分との間の連結及び連結解除を検出するように構成された接続センサを更に含む、請求項14に記載のカプラ。
- 前記ロック機構が、コレットと、前記第2の部分の前記内部空洞内に位置付けられたボールベアリングホルダと、を含み、前記コレットが、前記第1の部分の前記第1の軸の周囲で回転し、かつ前記コレットに向かう方向への前記第1の軸に沿った前記ボールベアリングホルダの並進を駆動して、前記第1の部分を前記第2の部分にロックするように動作可能である、請求項14に記載のカプラ。
- 前記ロック機構が、前記第2の部分の周囲に配置された半径方向圧縮部材を含み、前記半径方向圧縮部材が、前記第2の部分に半径方向力を加えて前記第2の部分を前記第1の部分にロックするように動作可能であり、前記駆動機構が、第1の構成で前記半径方向圧縮部材に連結されたハンドル及びねじ、又は第2の構成で前記半径方向圧縮部材に連結されたカムを含み、前記ハンドルが、前記第1の構成で前記ねじを回転させるように動作可能であり、前記カムが、前記第2の部分の周りの前記半径方向圧縮部材の半径方向圧縮力を変化させるように前記第2の構成で動作可能である、請求項14に記載のカプラ。
- 前記ロック機構が、前記第2の部分の外面の周囲に位置付けられた圧縮可能コレットを含み、前記圧縮可能コレットが、前記第1の部分と前記第2の部分との間で圧縮されて、前記第1の部分と前記第2の部分との間の連結を形成するように動作可能であり、圧縮可能収集が、前記第1の部分と前記第2の部分との間の電気的接続を提供するように構成されている、請求項14に記載のカプラ。
- 前記圧縮可能収集に連結されたトグルを更に含み、前記トグルが、前記圧縮可能収集をロック位置とロック解除位置との間で並進させるように動作可能である、請求項19に記載のカプラ。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201762476816P | 2017-03-26 | 2017-03-26 | |
| US62/476,816 | 2017-03-26 | ||
| US15/934,709 US11078945B2 (en) | 2017-03-26 | 2018-03-23 | Coupler to attach robotic arm to surgical table |
| US15/934,709 | 2018-03-23 | ||
| PCT/US2018/024393 WO2018183212A1 (en) | 2017-03-26 | 2018-03-26 | Coupler to attach robotic arm to surgical table |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020512076A JP2020512076A (ja) | 2020-04-23 |
| JP6905162B2 true JP6905162B2 (ja) | 2021-07-21 |
Family
ID=63581657
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019551299A Active JP6905162B2 (ja) | 2017-03-26 | 2018-03-26 | ロボットアームを外科用テーブルに取り付けるためのカプラ |
Country Status (8)
| Country | Link |
|---|---|
| US (2) | US11078945B2 (ja) |
| EP (1) | EP3579783A4 (ja) |
| JP (1) | JP6905162B2 (ja) |
| KR (1) | KR102326102B1 (ja) |
| CN (1) | CN110709025B (ja) |
| AU (1) | AU2018243738B2 (ja) |
| CA (1) | CA3054431C (ja) |
| WO (1) | WO2018183212A1 (ja) |
Families Citing this family (372)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9060770B2 (en) | 2003-05-20 | 2015-06-23 | Ethicon Endo-Surgery, Inc. | Robotically-driven surgical instrument with E-beam driver |
| US20070084897A1 (en) | 2003-05-20 | 2007-04-19 | Shelton Frederick E Iv | Articulating surgical stapling instrument incorporating a two-piece e-beam firing mechanism |
| US11896225B2 (en) | 2004-07-28 | 2024-02-13 | Cilag Gmbh International | Staple cartridge comprising a pan |
| US8215531B2 (en) | 2004-07-28 | 2012-07-10 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having a medical substance dispenser |
| US10159482B2 (en) | 2005-08-31 | 2018-12-25 | Ethicon Llc | Fastener cartridge assembly comprising a fixed anvil and different staple heights |
| US9237891B2 (en) | 2005-08-31 | 2016-01-19 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical stapling devices that produce formed staples having different lengths |
| US7934630B2 (en) | 2005-08-31 | 2011-05-03 | Ethicon Endo-Surgery, Inc. | Staple cartridges for forming staples having differing formed staple heights |
| US7669746B2 (en) | 2005-08-31 | 2010-03-02 | Ethicon Endo-Surgery, Inc. | Staple cartridges for forming staples having differing formed staple heights |
| US11484312B2 (en) | 2005-08-31 | 2022-11-01 | Cilag Gmbh International | Staple cartridge comprising a staple driver arrangement |
| US8991676B2 (en) | 2007-03-15 | 2015-03-31 | Ethicon Endo-Surgery, Inc. | Surgical staple having a slidable crown |
| US11246590B2 (en) | 2005-08-31 | 2022-02-15 | Cilag Gmbh International | Staple cartridge including staple drivers having different unfired heights |
| US20070106317A1 (en) | 2005-11-09 | 2007-05-10 | Shelton Frederick E Iv | Hydraulically and electrically actuated articulation joints for surgical instruments |
| US20110024477A1 (en) | 2009-02-06 | 2011-02-03 | Hall Steven G | Driven Surgical Stapler Improvements |
| US11793518B2 (en) | 2006-01-31 | 2023-10-24 | Cilag Gmbh International | Powered surgical instruments with firing system lockout arrangements |
| US8708213B2 (en) | 2006-01-31 | 2014-04-29 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a feedback system |
| US11224427B2 (en) | 2006-01-31 | 2022-01-18 | Cilag Gmbh International | Surgical stapling system including a console and retraction assembly |
| US8820603B2 (en) | 2006-01-31 | 2014-09-02 | Ethicon Endo-Surgery, Inc. | Accessing data stored in a memory of a surgical instrument |
| US7753904B2 (en) | 2006-01-31 | 2010-07-13 | Ethicon Endo-Surgery, Inc. | Endoscopic surgical instrument with a handle that can articulate with respect to the shaft |
| US20120292367A1 (en) | 2006-01-31 | 2012-11-22 | Ethicon Endo-Surgery, Inc. | Robotically-controlled end effector |
| US20110295295A1 (en) | 2006-01-31 | 2011-12-01 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical instrument having recording capabilities |
| US11278279B2 (en) | 2006-01-31 | 2022-03-22 | Cilag Gmbh International | Surgical instrument assembly |
| US8186555B2 (en) | 2006-01-31 | 2012-05-29 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting and fastening instrument with mechanical closure system |
| US7845537B2 (en) | 2006-01-31 | 2010-12-07 | Ethicon Endo-Surgery, Inc. | Surgical instrument having recording capabilities |
| US8992422B2 (en) | 2006-03-23 | 2015-03-31 | Ethicon Endo-Surgery, Inc. | Robotically-controlled endoscopic accessory channel |
| US8322455B2 (en) | 2006-06-27 | 2012-12-04 | Ethicon Endo-Surgery, Inc. | Manually driven surgical cutting and fastening instrument |
| US10568652B2 (en) | 2006-09-29 | 2020-02-25 | Ethicon Llc | Surgical staples having attached drivers of different heights and stapling instruments for deploying the same |
| US11980366B2 (en) | 2006-10-03 | 2024-05-14 | Cilag Gmbh International | Surgical instrument |
| US8652120B2 (en) | 2007-01-10 | 2014-02-18 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between control unit and sensor transponders |
| US11291441B2 (en) | 2007-01-10 | 2022-04-05 | Cilag Gmbh International | Surgical instrument with wireless communication between control unit and remote sensor |
| US8684253B2 (en) | 2007-01-10 | 2014-04-01 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between a control unit of a robotic system and remote sensor |
| US20080169332A1 (en) | 2007-01-11 | 2008-07-17 | Shelton Frederick E | Surgical stapling device with a curved cutting member |
| US11039836B2 (en) | 2007-01-11 | 2021-06-22 | Cilag Gmbh International | Staple cartridge for use with a surgical stapling instrument |
| US8931682B2 (en) | 2007-06-04 | 2015-01-13 | Ethicon Endo-Surgery, Inc. | Robotically-controlled shaft based rotary drive systems for surgical instruments |
| US11672531B2 (en) | 2007-06-04 | 2023-06-13 | Cilag Gmbh International | Rotary drive systems for surgical instruments |
| US7753245B2 (en) | 2007-06-22 | 2010-07-13 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments |
| US11849941B2 (en) | 2007-06-29 | 2023-12-26 | Cilag Gmbh International | Staple cartridge having staple cavities extending at a transverse angle relative to a longitudinal cartridge axis |
| US8636736B2 (en) | 2008-02-14 | 2014-01-28 | Ethicon Endo-Surgery, Inc. | Motorized surgical cutting and fastening instrument |
| US8573465B2 (en) | 2008-02-14 | 2013-11-05 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical end effector system with rotary actuated closure systems |
| US9179912B2 (en) | 2008-02-14 | 2015-11-10 | Ethicon Endo-Surgery, Inc. | Robotically-controlled motorized surgical cutting and fastening instrument |
| US8758391B2 (en) | 2008-02-14 | 2014-06-24 | Ethicon Endo-Surgery, Inc. | Interchangeable tools for surgical instruments |
| RU2493788C2 (ru) | 2008-02-14 | 2013-09-27 | Этикон Эндо-Серджери, Инк. | Хирургический режущий и крепежный инструмент, имеющий радиочастотные электроды |
| US7819298B2 (en) | 2008-02-14 | 2010-10-26 | Ethicon Endo-Surgery, Inc. | Surgical stapling apparatus with control features operable with one hand |
| US7866527B2 (en) | 2008-02-14 | 2011-01-11 | Ethicon Endo-Surgery, Inc. | Surgical stapling apparatus with interlockable firing system |
| US11986183B2 (en) | 2008-02-14 | 2024-05-21 | Cilag Gmbh International | Surgical cutting and fastening instrument comprising a plurality of sensors to measure an electrical parameter |
| US20130153641A1 (en) | 2008-02-15 | 2013-06-20 | Ethicon Endo-Surgery, Inc. | Releasable layer of material and surgical end effector having the same |
| US9386983B2 (en) | 2008-09-23 | 2016-07-12 | Ethicon Endo-Surgery, Llc | Robotically-controlled motorized surgical instrument |
| US11648005B2 (en) | 2008-09-23 | 2023-05-16 | Cilag Gmbh International | Robotically-controlled motorized surgical instrument with an end effector |
| US8210411B2 (en) | 2008-09-23 | 2012-07-03 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting instrument |
| US9005230B2 (en) | 2008-09-23 | 2015-04-14 | Ethicon Endo-Surgery, Inc. | Motorized surgical instrument |
| US8608045B2 (en) | 2008-10-10 | 2013-12-17 | Ethicon Endo-Sugery, Inc. | Powered surgical cutting and stapling apparatus with manually retractable firing system |
| US8517239B2 (en) | 2009-02-05 | 2013-08-27 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument comprising a magnetic element driver |
| WO2010090940A1 (en) | 2009-02-06 | 2010-08-12 | Ethicon Endo-Surgery, Inc. | Driven surgical stapler improvements |
| US8851354B2 (en) | 2009-12-24 | 2014-10-07 | Ethicon Endo-Surgery, Inc. | Surgical cutting instrument that analyzes tissue thickness |
| US8783543B2 (en) | 2010-07-30 | 2014-07-22 | Ethicon Endo-Surgery, Inc. | Tissue acquisition arrangements and methods for surgical stapling devices |
| US9168038B2 (en) | 2010-09-30 | 2015-10-27 | Ethicon Endo-Surgery, Inc. | Staple cartridge comprising a tissue thickness compensator |
| US11812965B2 (en) | 2010-09-30 | 2023-11-14 | Cilag Gmbh International | Layer of material for a surgical end effector |
| US9629814B2 (en) | 2010-09-30 | 2017-04-25 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator configured to redistribute compressive forces |
| US9351730B2 (en) | 2011-04-29 | 2016-05-31 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator comprising channels |
| US11298125B2 (en) | 2010-09-30 | 2022-04-12 | Cilag Gmbh International | Tissue stapler having a thickness compensator |
| US9320523B2 (en) | 2012-03-28 | 2016-04-26 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator comprising tissue ingrowth features |
| US10945731B2 (en) | 2010-09-30 | 2021-03-16 | Ethicon Llc | Tissue thickness compensator comprising controlled release and expansion |
| US11849952B2 (en) | 2010-09-30 | 2023-12-26 | Cilag Gmbh International | Staple cartridge comprising staples positioned within a compressible portion thereof |
| US9282962B2 (en) | 2010-09-30 | 2016-03-15 | Ethicon Endo-Surgery, Llc | Adhesive film laminate |
| US8695866B2 (en) | 2010-10-01 | 2014-04-15 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a power control circuit |
| BR112013027794B1 (pt) | 2011-04-29 | 2020-12-15 | Ethicon Endo-Surgery, Inc | Conjunto de cartucho de grampos |
| US9072535B2 (en) | 2011-05-27 | 2015-07-07 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments with rotatable staple deployment arrangements |
| US11207064B2 (en) | 2011-05-27 | 2021-12-28 | Cilag Gmbh International | Automated end effector component reloading system for use with a robotic system |
| RU2644272C2 (ru) | 2012-03-28 | 2018-02-08 | Этикон Эндо-Серджери, Инк. | Узел ограничения, включающий компенсатор толщины ткани |
| BR112014024098B1 (pt) | 2012-03-28 | 2021-05-25 | Ethicon Endo-Surgery, Inc. | cartucho de grampos |
| JP6305979B2 (ja) | 2012-03-28 | 2018-04-04 | エシコン・エンド−サージェリィ・インコーポレイテッドEthicon Endo−Surgery,Inc. | 複数の層を含む組織厚さコンペンセーター |
| US9101358B2 (en) | 2012-06-15 | 2015-08-11 | Ethicon Endo-Surgery, Inc. | Articulatable surgical instrument comprising a firing drive |
| US20140001231A1 (en) | 2012-06-28 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Firing system lockout arrangements for surgical instruments |
| BR112014032776B1 (pt) | 2012-06-28 | 2021-09-08 | Ethicon Endo-Surgery, Inc | Sistema de instrumento cirúrgico e kit cirúrgico para uso com um sistema de instrumento cirúrgico |
| JP6290201B2 (ja) | 2012-06-28 | 2018-03-07 | エシコン・エンド−サージェリィ・インコーポレイテッドEthicon Endo−Surgery,Inc. | 空クリップカートリッジ用のロックアウト |
| US11202631B2 (en) | 2012-06-28 | 2021-12-21 | Cilag Gmbh International | Stapling assembly comprising a firing lockout |
| US9289256B2 (en) | 2012-06-28 | 2016-03-22 | Ethicon Endo-Surgery, Llc | Surgical end effectors having angled tissue-contacting surfaces |
| US9649111B2 (en) | 2012-06-28 | 2017-05-16 | Ethicon Endo-Surgery, Llc | Replaceable clip cartridge for a clip applier |
| US9226751B2 (en) | 2012-06-28 | 2016-01-05 | Ethicon Endo-Surgery, Inc. | Surgical instrument system including replaceable end effectors |
| US20140148673A1 (en) | 2012-11-28 | 2014-05-29 | Hansen Medical, Inc. | Method of anchoring pullwire directly articulatable region in catheter |
| MX368026B (es) | 2013-03-01 | 2019-09-12 | Ethicon Endo Surgery Inc | Instrumento quirúrgico articulable con vías conductoras para la comunicación de la señal. |
| RU2669463C2 (ru) | 2013-03-01 | 2018-10-11 | Этикон Эндо-Серджери, Инк. | Хирургический инструмент с мягким упором |
| US9629629B2 (en) | 2013-03-14 | 2017-04-25 | Ethicon Endo-Surgey, LLC | Control systems for surgical instruments |
| US9808244B2 (en) | 2013-03-14 | 2017-11-07 | Ethicon Llc | Sensor arrangements for absolute positioning system for surgical instruments |
| BR112015026109B1 (pt) | 2013-04-16 | 2022-02-22 | Ethicon Endo-Surgery, Inc | Instrumento cirúrgico |
| US9867612B2 (en) | 2013-04-16 | 2018-01-16 | Ethicon Llc | Powered surgical stapler |
| RU2678363C2 (ru) | 2013-08-23 | 2019-01-28 | ЭТИКОН ЭНДО-СЕРДЖЕРИ, ЭлЭлСи | Устройства втягивания пускового элемента для хирургических инструментов с электропитанием |
| US20150053743A1 (en) | 2013-08-23 | 2015-02-26 | Ethicon Endo-Surgery, Inc. | Error detection arrangements for surgical instrument assemblies |
| US9962161B2 (en) | 2014-02-12 | 2018-05-08 | Ethicon Llc | Deliverable surgical instrument |
| EP3243476B1 (en) | 2014-03-24 | 2019-11-06 | Auris Health, Inc. | Systems and devices for catheter driving instinctiveness |
| US10004497B2 (en) | 2014-03-26 | 2018-06-26 | Ethicon Llc | Interface systems for use with surgical instruments |
| BR112016021943B1 (pt) | 2014-03-26 | 2022-06-14 | Ethicon Endo-Surgery, Llc | Instrumento cirúrgico para uso por um operador em um procedimento cirúrgico |
| US9804618B2 (en) | 2014-03-26 | 2017-10-31 | Ethicon Llc | Systems and methods for controlling a segmented circuit |
| US20150297225A1 (en) | 2014-04-16 | 2015-10-22 | Ethicon Endo-Surgery, Inc. | Fastener cartridges including extensions having different configurations |
| JP6612256B2 (ja) | 2014-04-16 | 2019-11-27 | エシコン エルエルシー | 不均一な締結具を備える締結具カートリッジ |
| JP6636452B2 (ja) | 2014-04-16 | 2020-01-29 | エシコン エルエルシーEthicon LLC | 異なる構成を有する延在部を含む締結具カートリッジ |
| US9844369B2 (en) | 2014-04-16 | 2017-12-19 | Ethicon Llc | Surgical end effectors with firing element monitoring arrangements |
| JP6532889B2 (ja) | 2014-04-16 | 2019-06-19 | エシコン エルエルシーEthicon LLC | 締結具カートリッジ組立体及びステープル保持具カバー配置構成 |
| US10016199B2 (en) | 2014-09-05 | 2018-07-10 | Ethicon Llc | Polarity of hall magnet to identify cartridge type |
| BR112017004361B1 (pt) | 2014-09-05 | 2023-04-11 | Ethicon Llc | Sistema eletrônico para um instrumento cirúrgico |
| US11311294B2 (en) | 2014-09-05 | 2022-04-26 | Cilag Gmbh International | Powered medical device including measurement of closure state of jaws |
| US10105142B2 (en) | 2014-09-18 | 2018-10-23 | Ethicon Llc | Surgical stapler with plurality of cutting elements |
| CN107427300B (zh) | 2014-09-26 | 2020-12-04 | 伊西康有限责任公司 | 外科缝合支撑物和辅助材料 |
| US11523821B2 (en) | 2014-09-26 | 2022-12-13 | Cilag Gmbh International | Method for creating a flexible staple line |
| WO2016054256A1 (en) | 2014-09-30 | 2016-04-07 | Auris Surgical Robotics, Inc | Configurable robotic surgical system with virtual rail and flexible endoscope |
| US9924944B2 (en) | 2014-10-16 | 2018-03-27 | Ethicon Llc | Staple cartridge comprising an adjunct material |
| US10314463B2 (en) | 2014-10-24 | 2019-06-11 | Auris Health, Inc. | Automated endoscope calibration |
| US11141153B2 (en) | 2014-10-29 | 2021-10-12 | Cilag Gmbh International | Staple cartridges comprising driver arrangements |
| US10517594B2 (en) | 2014-10-29 | 2019-12-31 | Ethicon Llc | Cartridge assemblies for surgical staplers |
| US9844376B2 (en) | 2014-11-06 | 2017-12-19 | Ethicon Llc | Staple cartridge comprising a releasable adjunct material |
| US10736636B2 (en) | 2014-12-10 | 2020-08-11 | Ethicon Llc | Articulatable surgical instrument system |
| US9844375B2 (en) | 2014-12-18 | 2017-12-19 | Ethicon Llc | Drive arrangements for articulatable surgical instruments |
| US9987000B2 (en) | 2014-12-18 | 2018-06-05 | Ethicon Llc | Surgical instrument assembly comprising a flexible articulation system |
| US10085748B2 (en) | 2014-12-18 | 2018-10-02 | Ethicon Llc | Locking arrangements for detachable shaft assemblies with articulatable surgical end effectors |
| US10245027B2 (en) | 2014-12-18 | 2019-04-02 | Ethicon Llc | Surgical instrument with an anvil that is selectively movable about a discrete non-movable axis relative to a staple cartridge |
| MX2017008108A (es) | 2014-12-18 | 2018-03-06 | Ethicon Llc | Instrumento quirurgico con un yunque que puede moverse de manera selectiva sobre un eje discreto no movil con relacion a un cartucho de grapas. |
| US9844374B2 (en) | 2014-12-18 | 2017-12-19 | Ethicon Llc | Surgical instrument systems comprising an articulatable end effector and means for adjusting the firing stroke of a firing member |
| CN113893039A (zh) | 2015-02-20 | 2022-01-07 | 史赛克公司 | 安装系统 |
| US11154301B2 (en) | 2015-02-27 | 2021-10-26 | Cilag Gmbh International | Modular stapling assembly |
| US10052044B2 (en) | 2015-03-06 | 2018-08-21 | Ethicon Llc | Time dependent evaluation of sensor data to determine stability, creep, and viscoelastic elements of measures |
| US10245033B2 (en) | 2015-03-06 | 2019-04-02 | Ethicon Llc | Surgical instrument comprising a lockable battery housing |
| JP2020121162A (ja) | 2015-03-06 | 2020-08-13 | エシコン エルエルシーEthicon LLC | 測定の安定性要素、クリープ要素、及び粘弾性要素を決定するためのセンサデータの時間依存性評価 |
| US9901342B2 (en) | 2015-03-06 | 2018-02-27 | Ethicon Endo-Surgery, Llc | Signal and power communication system positioned on a rotatable shaft |
| US9993248B2 (en) | 2015-03-06 | 2018-06-12 | Ethicon Endo-Surgery, Llc | Smart sensors with local signal processing |
| US10441279B2 (en) | 2015-03-06 | 2019-10-15 | Ethicon Llc | Multiple level thresholds to modify operation of powered surgical instruments |
| US10433844B2 (en) | 2015-03-31 | 2019-10-08 | Ethicon Llc | Surgical instrument with selectively disengageable threaded drive systems |
| US10835249B2 (en) | 2015-08-17 | 2020-11-17 | Ethicon Llc | Implantable layers for a surgical instrument |
| US10238386B2 (en) | 2015-09-23 | 2019-03-26 | Ethicon Llc | Surgical stapler having motor control based on an electrical parameter related to a motor current |
| US10105139B2 (en) | 2015-09-23 | 2018-10-23 | Ethicon Llc | Surgical stapler having downstream current-based motor control |
| US10299878B2 (en) | 2015-09-25 | 2019-05-28 | Ethicon Llc | Implantable adjunct systems for determining adjunct skew |
| US10980539B2 (en) | 2015-09-30 | 2021-04-20 | Ethicon Llc | Implantable adjunct comprising bonded layers |
| US10524788B2 (en) | 2015-09-30 | 2020-01-07 | Ethicon Llc | Compressible adjunct with attachment regions |
| US11890015B2 (en) | 2015-09-30 | 2024-02-06 | Cilag Gmbh International | Compressible adjunct with crossing spacer fibers |
| US10271849B2 (en) | 2015-09-30 | 2019-04-30 | Ethicon Llc | Woven constructs with interlocked standing fibers |
| US10143526B2 (en) | 2015-11-30 | 2018-12-04 | Auris Health, Inc. | Robot-assisted driving systems and methods |
| US10265068B2 (en) | 2015-12-30 | 2019-04-23 | Ethicon Llc | Surgical instruments with separable motors and motor control circuits |
| US10292704B2 (en) | 2015-12-30 | 2019-05-21 | Ethicon Llc | Mechanisms for compensating for battery pack failure in powered surgical instruments |
| US10368865B2 (en) | 2015-12-30 | 2019-08-06 | Ethicon Llc | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US11213293B2 (en) | 2016-02-09 | 2022-01-04 | Cilag Gmbh International | Articulatable surgical instruments with single articulation link arrangements |
| CN108882932B (zh) | 2016-02-09 | 2021-07-23 | 伊西康有限责任公司 | 具有非对称关节运动构造的外科器械 |
| US11224426B2 (en) | 2016-02-12 | 2022-01-18 | Cilag Gmbh International | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US10448948B2 (en) | 2016-02-12 | 2019-10-22 | Ethicon Llc | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US10492783B2 (en) | 2016-04-15 | 2019-12-03 | Ethicon, Llc | Surgical instrument with improved stop/start control during a firing motion |
| US10828028B2 (en) | 2016-04-15 | 2020-11-10 | Ethicon Llc | Surgical instrument with multiple program responses during a firing motion |
| US11607239B2 (en) | 2016-04-15 | 2023-03-21 | Cilag Gmbh International | Systems and methods for controlling a surgical stapling and cutting instrument |
| US11179150B2 (en) | 2016-04-15 | 2021-11-23 | Cilag Gmbh International | Systems and methods for controlling a surgical stapling and cutting instrument |
| US10426467B2 (en) | 2016-04-15 | 2019-10-01 | Ethicon Llc | Surgical instrument with detection sensors |
| US10357247B2 (en) | 2016-04-15 | 2019-07-23 | Ethicon Llc | Surgical instrument with multiple program responses during a firing motion |
| US10456137B2 (en) | 2016-04-15 | 2019-10-29 | Ethicon Llc | Staple formation detection mechanisms |
| US10335145B2 (en) | 2016-04-15 | 2019-07-02 | Ethicon Llc | Modular surgical instrument with configurable operating mode |
| US11317917B2 (en) | 2016-04-18 | 2022-05-03 | Cilag Gmbh International | Surgical stapling system comprising a lockable firing assembly |
| US10368867B2 (en) | 2016-04-18 | 2019-08-06 | Ethicon Llc | Surgical instrument comprising a lockout |
| US20170296173A1 (en) | 2016-04-18 | 2017-10-19 | Ethicon Endo-Surgery, Llc | Method for operating a surgical instrument |
| US9931025B1 (en) | 2016-09-30 | 2018-04-03 | Auris Surgical Robotics, Inc. | Automated calibration of endoscopes with pull wires |
| US11419606B2 (en) | 2016-12-21 | 2022-08-23 | Cilag Gmbh International | Shaft assembly comprising a clutch configured to adapt the output of a rotary firing member to two different systems |
| US20180168615A1 (en) | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Method of deforming staples from two different types of staple cartridges with the same surgical stapling instrument |
| CN110099619B (zh) | 2016-12-21 | 2022-07-15 | 爱惜康有限责任公司 | 用于外科端部执行器和可替换工具组件的闭锁装置 |
| US10682138B2 (en) | 2016-12-21 | 2020-06-16 | Ethicon Llc | Bilaterally asymmetric staple forming pocket pairs |
| BR112019011947A2 (pt) | 2016-12-21 | 2019-10-29 | Ethicon Llc | sistemas de grampeamento cirúrgico |
| JP7010956B2 (ja) | 2016-12-21 | 2022-01-26 | エシコン エルエルシー | 組織をステープル留めする方法 |
| US10603036B2 (en) | 2016-12-21 | 2020-03-31 | Ethicon Llc | Articulatable surgical instrument with independent pivotable linkage distal of an articulation lock |
| US10568624B2 (en) | 2016-12-21 | 2020-02-25 | Ethicon Llc | Surgical instruments with jaws that are pivotable about a fixed axis and include separate and distinct closure and firing systems |
| US11134942B2 (en) | 2016-12-21 | 2021-10-05 | Cilag Gmbh International | Surgical stapling instruments and staple-forming anvils |
| US10813638B2 (en) | 2016-12-21 | 2020-10-27 | Ethicon Llc | Surgical end effectors with expandable tissue stop arrangements |
| US10588632B2 (en) | 2016-12-21 | 2020-03-17 | Ethicon Llc | Surgical end effectors and firing members thereof |
| US10835245B2 (en) | 2016-12-21 | 2020-11-17 | Ethicon Llc | Method for attaching a shaft assembly to a surgical instrument and, alternatively, to a surgical robot |
| US20180168625A1 (en) | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Surgical stapling instruments with smart staple cartridges |
| US10893864B2 (en) | 2016-12-21 | 2021-01-19 | Ethicon | Staple cartridges and arrangements of staples and staple cavities therein |
| US11090048B2 (en) | 2016-12-21 | 2021-08-17 | Cilag Gmbh International | Method for resetting a fuse of a surgical instrument shaft |
| US10856868B2 (en) | 2016-12-21 | 2020-12-08 | Ethicon Llc | Firing member pin configurations |
| US10244926B2 (en) | 2016-12-28 | 2019-04-02 | Auris Health, Inc. | Detecting endolumenal buckling of flexible instruments |
| KR20240035632A (ko) | 2017-05-12 | 2024-03-15 | 아우리스 헬스, 인코포레이티드 | 생검 장치 및 시스템 |
| US10792119B2 (en) | 2017-05-22 | 2020-10-06 | Ethicon Llc | Robotic arm cart and uses therefor |
| US10856948B2 (en) * | 2017-05-31 | 2020-12-08 | Verb Surgical Inc. | Cart for robotic arms and method and apparatus for registering cart to surgical table |
| US10485623B2 (en) | 2017-06-01 | 2019-11-26 | Verb Surgical Inc. | Robotic arm cart with fine position adjustment features and uses therefor |
| US10980537B2 (en) | 2017-06-20 | 2021-04-20 | Ethicon Llc | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on measured time over a specified number of shaft rotations |
| US10888321B2 (en) | 2017-06-20 | 2021-01-12 | Ethicon Llc | Systems and methods for controlling velocity of a displacement member of a surgical stapling and cutting instrument |
| US11517325B2 (en) | 2017-06-20 | 2022-12-06 | Cilag Gmbh International | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on measured displacement distance traveled over a specified time interval |
| US11653914B2 (en) | 2017-06-20 | 2023-05-23 | Cilag Gmbh International | Systems and methods for controlling motor velocity of a surgical stapling and cutting instrument according to articulation angle of end effector |
| US11071554B2 (en) | 2017-06-20 | 2021-07-27 | Cilag Gmbh International | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on magnitude of velocity error measurements |
| US10913145B2 (en) * | 2017-06-20 | 2021-02-09 | Verb Surgical Inc. | Cart for robotic arms and method and apparatus for cartridge or magazine loading of arms |
| US10779820B2 (en) | 2017-06-20 | 2020-09-22 | Ethicon Llc | Systems and methods for controlling motor speed according to user input for a surgical instrument |
| US11382638B2 (en) | 2017-06-20 | 2022-07-12 | Cilag Gmbh International | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on measured time over a specified displacement distance |
| US10881399B2 (en) | 2017-06-20 | 2021-01-05 | Ethicon Llc | Techniques for adaptive control of motor velocity of a surgical stapling and cutting instrument |
| US10307170B2 (en) | 2017-06-20 | 2019-06-04 | Ethicon Llc | Method for closed loop control of motor velocity of a surgical stapling and cutting instrument |
| US11090046B2 (en) | 2017-06-20 | 2021-08-17 | Cilag Gmbh International | Systems and methods for controlling displacement member motion of a surgical stapling and cutting instrument |
| US11141154B2 (en) | 2017-06-27 | 2021-10-12 | Cilag Gmbh International | Surgical end effectors and anvils |
| US11324503B2 (en) | 2017-06-27 | 2022-05-10 | Cilag Gmbh International | Surgical firing member arrangements |
| US10993716B2 (en) | 2017-06-27 | 2021-05-04 | Ethicon Llc | Surgical anvil arrangements |
| US11266405B2 (en) | 2017-06-27 | 2022-03-08 | Cilag Gmbh International | Surgical anvil manufacturing methods |
| US11484310B2 (en) | 2017-06-28 | 2022-11-01 | Cilag Gmbh International | Surgical instrument comprising a shaft including a closure tube profile |
| US11246592B2 (en) | 2017-06-28 | 2022-02-15 | Cilag Gmbh International | Surgical instrument comprising an articulation system lockable to a frame |
| US10903685B2 (en) | 2017-06-28 | 2021-01-26 | Ethicon Llc | Surgical shaft assemblies with slip ring assemblies forming capacitive channels |
| US11020114B2 (en) | 2017-06-28 | 2021-06-01 | Cilag Gmbh International | Surgical instruments with articulatable end effector with axially shortened articulation joint configurations |
| US10765427B2 (en) | 2017-06-28 | 2020-09-08 | Ethicon Llc | Method for articulating a surgical instrument |
| USD906355S1 (en) | 2017-06-28 | 2020-12-29 | Ethicon Llc | Display screen or portion thereof with a graphical user interface for a surgical instrument |
| US10299870B2 (en) | 2017-06-28 | 2019-05-28 | Auris Health, Inc. | Instrument insertion compensation |
| EP4070740A1 (en) | 2017-06-28 | 2022-10-12 | Cilag GmbH International | Surgical instrument comprising selectively actuatable rotatable couplers |
| US11564686B2 (en) | 2017-06-28 | 2023-01-31 | Cilag Gmbh International | Surgical shaft assemblies with flexible interfaces |
| US11259805B2 (en) | 2017-06-28 | 2022-03-01 | Cilag Gmbh International | Surgical instrument comprising firing member supports |
| US10932772B2 (en) | 2017-06-29 | 2021-03-02 | Ethicon Llc | Methods for closed loop velocity control for robotic surgical instrument |
| US10426559B2 (en) | 2017-06-30 | 2019-10-01 | Auris Health, Inc. | Systems and methods for medical instrument compression compensation |
| US11974742B2 (en) | 2017-08-03 | 2024-05-07 | Cilag Gmbh International | Surgical system comprising an articulation bailout |
| US11944300B2 (en) * | 2017-08-03 | 2024-04-02 | Cilag Gmbh International | Method for operating a surgical system bailout |
| US11471155B2 (en) | 2017-08-03 | 2022-10-18 | Cilag Gmbh International | Surgical system bailout |
| US11304695B2 (en) | 2017-08-03 | 2022-04-19 | Cilag Gmbh International | Surgical system shaft interconnection |
| US10966720B2 (en) * | 2017-09-01 | 2021-04-06 | RevMedica, Inc. | Surgical stapler with removable power pack |
| US11399829B2 (en) | 2017-09-29 | 2022-08-02 | Cilag Gmbh International | Systems and methods of initiating a power shutdown mode for a surgical instrument |
| USD907648S1 (en) | 2017-09-29 | 2021-01-12 | Ethicon Llc | Display screen or portion thereof with animated graphical user interface |
| USD907647S1 (en) | 2017-09-29 | 2021-01-12 | Ethicon Llc | Display screen or portion thereof with animated graphical user interface |
| USD917500S1 (en) | 2017-09-29 | 2021-04-27 | Ethicon Llc | Display screen or portion thereof with graphical user interface |
| US10145747B1 (en) * | 2017-10-10 | 2018-12-04 | Auris Health, Inc. | Detection of undesirable forces on a surgical robotic arm |
| US11090075B2 (en) | 2017-10-30 | 2021-08-17 | Cilag Gmbh International | Articulation features for surgical end effector |
| US11134944B2 (en) | 2017-10-30 | 2021-10-05 | Cilag Gmbh International | Surgical stapler knife motion controls |
| US10842490B2 (en) | 2017-10-31 | 2020-11-24 | Ethicon Llc | Cartridge body design with force reduction based on firing completion |
| EP3684282B1 (en) | 2017-12-06 | 2024-02-21 | Auris Health, Inc. | Systems to correct for uncommanded instrument roll |
| AU2018384820A1 (en) | 2017-12-14 | 2020-05-21 | Auris Health, Inc. | System and method for estimating instrument location |
| US10966718B2 (en) | 2017-12-15 | 2021-04-06 | Ethicon Llc | Dynamic clamping assemblies with improved wear characteristics for use in connection with electromechanical surgical instruments |
| US10779826B2 (en) | 2017-12-15 | 2020-09-22 | Ethicon Llc | Methods of operating surgical end effectors |
| US10869666B2 (en) | 2017-12-15 | 2020-12-22 | Ethicon Llc | Adapters with control systems for controlling multiple motors of an electromechanical surgical instrument |
| US11071543B2 (en) | 2017-12-15 | 2021-07-27 | Cilag Gmbh International | Surgical end effectors with clamping assemblies configured to increase jaw aperture ranges |
| US10779825B2 (en) | 2017-12-15 | 2020-09-22 | Ethicon Llc | Adapters with end effector position sensing and control arrangements for use in connection with electromechanical surgical instruments |
| US10743875B2 (en) | 2017-12-15 | 2020-08-18 | Ethicon Llc | Surgical end effectors with jaw stiffener arrangements configured to permit monitoring of firing member |
| US11033267B2 (en) | 2017-12-15 | 2021-06-15 | Ethicon Llc | Systems and methods of controlling a clamping member firing rate of a surgical instrument |
| US11197670B2 (en) | 2017-12-15 | 2021-12-14 | Cilag Gmbh International | Surgical end effectors with pivotal jaws configured to touch at their respective distal ends when fully closed |
| US10828033B2 (en) | 2017-12-15 | 2020-11-10 | Ethicon Llc | Handheld electromechanical surgical instruments with improved motor control arrangements for positioning components of an adapter coupled thereto |
| US10835330B2 (en) | 2017-12-19 | 2020-11-17 | Ethicon Llc | Method for determining the position of a rotatable jaw of a surgical instrument attachment assembly |
| US10729509B2 (en) | 2017-12-19 | 2020-08-04 | Ethicon Llc | Surgical instrument comprising closure and firing locking mechanism |
| USD910847S1 (en) | 2017-12-19 | 2021-02-16 | Ethicon Llc | Surgical instrument assembly |
| US11020112B2 (en) | 2017-12-19 | 2021-06-01 | Ethicon Llc | Surgical tools configured for interchangeable use with different controller interfaces |
| US11751867B2 (en) | 2017-12-21 | 2023-09-12 | Cilag Gmbh International | Surgical instrument comprising sequenced systems |
| US11129680B2 (en) | 2017-12-21 | 2021-09-28 | Cilag Gmbh International | Surgical instrument comprising a projector |
| US11311290B2 (en) | 2017-12-21 | 2022-04-26 | Cilag Gmbh International | Surgical instrument comprising an end effector dampener |
| US11076853B2 (en) | 2017-12-21 | 2021-08-03 | Cilag Gmbh International | Systems and methods of displaying a knife position during transection for a surgical instrument |
| JP7301884B2 (ja) | 2018-02-13 | 2023-07-03 | オーリス ヘルス インコーポレイテッド | 医療用器具を駆動するためのシステム及び方法 |
| US11077535B2 (en) * | 2018-02-14 | 2021-08-03 | Samsung Electronics Co., Ltd. | Process system having locking pin and locking pin |
| US11207065B2 (en) | 2018-08-20 | 2021-12-28 | Cilag Gmbh International | Method for fabricating surgical stapler anvils |
| US10856870B2 (en) | 2018-08-20 | 2020-12-08 | Ethicon Llc | Switching arrangements for motor powered articulatable surgical instruments |
| USD914878S1 (en) | 2018-08-20 | 2021-03-30 | Ethicon Llc | Surgical instrument anvil |
| US11045192B2 (en) | 2018-08-20 | 2021-06-29 | Cilag Gmbh International | Fabricating techniques for surgical stapler anvils |
| US11253256B2 (en) | 2018-08-20 | 2022-02-22 | Cilag Gmbh International | Articulatable motor powered surgical instruments with dedicated articulation motor arrangements |
| US11324501B2 (en) | 2018-08-20 | 2022-05-10 | Cilag Gmbh International | Surgical stapling devices with improved closure members |
| US11291440B2 (en) | 2018-08-20 | 2022-04-05 | Cilag Gmbh International | Method for operating a powered articulatable surgical instrument |
| US11083458B2 (en) | 2018-08-20 | 2021-08-10 | Cilag Gmbh International | Powered surgical instruments with clutching arrangements to convert linear drive motions to rotary drive motions |
| US11039834B2 (en) | 2018-08-20 | 2021-06-22 | Cilag Gmbh International | Surgical stapler anvils with staple directing protrusions and tissue stability features |
| US10912559B2 (en) | 2018-08-20 | 2021-02-09 | Ethicon Llc | Reinforced deformable anvil tip for surgical stapler anvil |
| JP6745306B2 (ja) * | 2018-08-28 | 2020-08-26 | 株式会社メディカロイド | アダプタおよび接続方法 |
| AU2019347767A1 (en) | 2018-09-28 | 2021-04-08 | Auris Health, Inc. | Systems and methods for docking medical instruments |
| WO2020117913A2 (en) * | 2018-12-04 | 2020-06-11 | Mako Surgical Corp. | Mounting system with sterile barrier assembly for use in coupling surgical components |
| US11452226B2 (en) * | 2019-03-13 | 2022-09-20 | Lg Electronics Inc. | Robot with through-hole to receive pin |
| US11172929B2 (en) | 2019-03-25 | 2021-11-16 | Cilag Gmbh International | Articulation drive arrangements for surgical systems |
| US11147553B2 (en) | 2019-03-25 | 2021-10-19 | Cilag Gmbh International | Firing drive arrangements for surgical systems |
| US11147551B2 (en) | 2019-03-25 | 2021-10-19 | Cilag Gmbh International | Firing drive arrangements for surgical systems |
| US11696761B2 (en) | 2019-03-25 | 2023-07-11 | Cilag Gmbh International | Firing drive arrangements for surgical systems |
| US11471157B2 (en) | 2019-04-30 | 2022-10-18 | Cilag Gmbh International | Articulation control mapping for a surgical instrument |
| US11452528B2 (en) | 2019-04-30 | 2022-09-27 | Cilag Gmbh International | Articulation actuators for a surgical instrument |
| US11648009B2 (en) | 2019-04-30 | 2023-05-16 | Cilag Gmbh International | Rotatable jaw tip for a surgical instrument |
| US11903581B2 (en) | 2019-04-30 | 2024-02-20 | Cilag Gmbh International | Methods for stapling tissue using a surgical instrument |
| US11426251B2 (en) | 2019-04-30 | 2022-08-30 | Cilag Gmbh International | Articulation directional lights on a surgical instrument |
| US11432816B2 (en) | 2019-04-30 | 2022-09-06 | Cilag Gmbh International | Articulation pin for a surgical instrument |
| US11253254B2 (en) | 2019-04-30 | 2022-02-22 | Cilag Gmbh International | Shaft rotation actuator on a surgical instrument |
| US11771419B2 (en) | 2019-06-28 | 2023-10-03 | Cilag Gmbh International | Packaging for a replaceable component of a surgical stapling system |
| US11291451B2 (en) | 2019-06-28 | 2022-04-05 | Cilag Gmbh International | Surgical instrument with battery compatibility verification functionality |
| US11497492B2 (en) | 2019-06-28 | 2022-11-15 | Cilag Gmbh International | Surgical instrument including an articulation lock |
| US11553971B2 (en) | 2019-06-28 | 2023-01-17 | Cilag Gmbh International | Surgical RFID assemblies for display and communication |
| US11660163B2 (en) | 2019-06-28 | 2023-05-30 | Cilag Gmbh International | Surgical system with RFID tags for updating motor assembly parameters |
| US11219455B2 (en) | 2019-06-28 | 2022-01-11 | Cilag Gmbh International | Surgical instrument including a lockout key |
| US11684434B2 (en) | 2019-06-28 | 2023-06-27 | Cilag Gmbh International | Surgical RFID assemblies for instrument operational setting control |
| US11523822B2 (en) | 2019-06-28 | 2022-12-13 | Cilag Gmbh International | Battery pack including a circuit interrupter |
| US11627959B2 (en) | 2019-06-28 | 2023-04-18 | Cilag Gmbh International | Surgical instruments including manual and powered system lockouts |
| US11298127B2 (en) | 2019-06-28 | 2022-04-12 | Cilag GmbH Interational | Surgical stapling system having a lockout mechanism for an incompatible cartridge |
| US11464601B2 (en) | 2019-06-28 | 2022-10-11 | Cilag Gmbh International | Surgical instrument comprising an RFID system for tracking a movable component |
| US11051807B2 (en) | 2019-06-28 | 2021-07-06 | Cilag Gmbh International | Packaging assembly including a particulate trap |
| US11259803B2 (en) | 2019-06-28 | 2022-03-01 | Cilag Gmbh International | Surgical stapling system having an information encryption protocol |
| US11224497B2 (en) | 2019-06-28 | 2022-01-18 | Cilag Gmbh International | Surgical systems with multiple RFID tags |
| US11478241B2 (en) | 2019-06-28 | 2022-10-25 | Cilag Gmbh International | Staple cartridge including projections |
| US11399837B2 (en) | 2019-06-28 | 2022-08-02 | Cilag Gmbh International | Mechanisms for motor control adjustments of a motorized surgical instrument |
| US11246678B2 (en) | 2019-06-28 | 2022-02-15 | Cilag Gmbh International | Surgical stapling system having a frangible RFID tag |
| US11376098B2 (en) | 2019-06-28 | 2022-07-05 | Cilag Gmbh International | Surgical instrument system comprising an RFID system |
| US11298132B2 (en) | 2019-06-28 | 2022-04-12 | Cilag GmbH Inlernational | Staple cartridge including a honeycomb extension |
| US11426167B2 (en) | 2019-06-28 | 2022-08-30 | Cilag Gmbh International | Mechanisms for proper anvil attachment surgical stapling head assembly |
| US11638587B2 (en) | 2019-06-28 | 2023-05-02 | Cilag Gmbh International | RFID identification systems for surgical instruments |
| US11241235B2 (en) | 2019-06-28 | 2022-02-08 | Cilag Gmbh International | Method of using multiple RFID chips with a surgical assembly |
| US11504122B2 (en) | 2019-12-19 | 2022-11-22 | Cilag Gmbh International | Surgical instrument comprising a nested firing member |
| US11529139B2 (en) | 2019-12-19 | 2022-12-20 | Cilag Gmbh International | Motor driven surgical instrument |
| US11291447B2 (en) | 2019-12-19 | 2022-04-05 | Cilag Gmbh International | Stapling instrument comprising independent jaw closing and staple firing systems |
| US11464512B2 (en) | 2019-12-19 | 2022-10-11 | Cilag Gmbh International | Staple cartridge comprising a curved deck surface |
| US11304696B2 (en) | 2019-12-19 | 2022-04-19 | Cilag Gmbh International | Surgical instrument comprising a powered articulation system |
| US11559304B2 (en) | 2019-12-19 | 2023-01-24 | Cilag Gmbh International | Surgical instrument comprising a rapid closure mechanism |
| US11701111B2 (en) | 2019-12-19 | 2023-07-18 | Cilag Gmbh International | Method for operating a surgical stapling instrument |
| US11234698B2 (en) | 2019-12-19 | 2022-02-01 | Cilag Gmbh International | Stapling system comprising a clamp lockout and a firing lockout |
| US11844520B2 (en) | 2019-12-19 | 2023-12-19 | Cilag Gmbh International | Staple cartridge comprising driver retention members |
| US11931033B2 (en) | 2019-12-19 | 2024-03-19 | Cilag Gmbh International | Staple cartridge comprising a latch lockout |
| US11529137B2 (en) | 2019-12-19 | 2022-12-20 | Cilag Gmbh International | Staple cartridge comprising driver retention members |
| US11576672B2 (en) | 2019-12-19 | 2023-02-14 | Cilag Gmbh International | Surgical instrument comprising a closure system including a closure member and an opening member driven by a drive screw |
| US11911032B2 (en) | 2019-12-19 | 2024-02-27 | Cilag Gmbh International | Staple cartridge comprising a seating cam |
| US11607219B2 (en) | 2019-12-19 | 2023-03-21 | Cilag Gmbh International | Staple cartridge comprising a detachable tissue cutting knife |
| US11446029B2 (en) | 2019-12-19 | 2022-09-20 | Cilag Gmbh International | Staple cartridge comprising projections extending from a curved deck surface |
| US20210259693A1 (en) * | 2020-02-26 | 2021-08-26 | Covidien Lp | Surgical stapling device with flexible shaft |
| DE102020204272B3 (de) * | 2020-04-01 | 2021-07-22 | Kuka Deutschland Gmbh | Logistiksystem |
| USD976401S1 (en) | 2020-06-02 | 2023-01-24 | Cilag Gmbh International | Staple cartridge |
| USD967421S1 (en) | 2020-06-02 | 2022-10-18 | Cilag Gmbh International | Staple cartridge |
| USD974560S1 (en) | 2020-06-02 | 2023-01-03 | Cilag Gmbh International | Staple cartridge |
| USD975851S1 (en) | 2020-06-02 | 2023-01-17 | Cilag Gmbh International | Staple cartridge |
| USD975278S1 (en) | 2020-06-02 | 2023-01-10 | Cilag Gmbh International | Staple cartridge |
| USD966512S1 (en) | 2020-06-02 | 2022-10-11 | Cilag Gmbh International | Staple cartridge |
| USD975850S1 (en) | 2020-06-02 | 2023-01-17 | Cilag Gmbh International | Staple cartridge |
| US11638582B2 (en) | 2020-07-28 | 2023-05-02 | Cilag Gmbh International | Surgical instruments with torsion spine drive arrangements |
| US11896217B2 (en) | 2020-10-29 | 2024-02-13 | Cilag Gmbh International | Surgical instrument comprising an articulation lock |
| USD980425S1 (en) | 2020-10-29 | 2023-03-07 | Cilag Gmbh International | Surgical instrument assembly |
| US11617577B2 (en) | 2020-10-29 | 2023-04-04 | Cilag Gmbh International | Surgical instrument comprising a sensor configured to sense whether an articulation drive of the surgical instrument is actuatable |
| US11844518B2 (en) | 2020-10-29 | 2023-12-19 | Cilag Gmbh International | Method for operating a surgical instrument |
| US11452526B2 (en) | 2020-10-29 | 2022-09-27 | Cilag Gmbh International | Surgical instrument comprising a staged voltage regulation start-up system |
| US11779330B2 (en) | 2020-10-29 | 2023-10-10 | Cilag Gmbh International | Surgical instrument comprising a jaw alignment system |
| US11717289B2 (en) | 2020-10-29 | 2023-08-08 | Cilag Gmbh International | Surgical instrument comprising an indicator which indicates that an articulation drive is actuatable |
| USD1013170S1 (en) | 2020-10-29 | 2024-01-30 | Cilag Gmbh International | Surgical instrument assembly |
| US11931025B2 (en) | 2020-10-29 | 2024-03-19 | Cilag Gmbh International | Surgical instrument comprising a releasable closure drive lock |
| US11534259B2 (en) | 2020-10-29 | 2022-12-27 | Cilag Gmbh International | Surgical instrument comprising an articulation indicator |
| US11517390B2 (en) | 2020-10-29 | 2022-12-06 | Cilag Gmbh International | Surgical instrument comprising a limited travel switch |
| US11627960B2 (en) | 2020-12-02 | 2023-04-18 | Cilag Gmbh International | Powered surgical instruments with smart reload with separately attachable exteriorly mounted wiring connections |
| US11849943B2 (en) | 2020-12-02 | 2023-12-26 | Cilag Gmbh International | Surgical instrument with cartridge release mechanisms |
| US11944296B2 (en) | 2020-12-02 | 2024-04-02 | Cilag Gmbh International | Powered surgical instruments with external connectors |
| US11653920B2 (en) | 2020-12-02 | 2023-05-23 | Cilag Gmbh International | Powered surgical instruments with communication interfaces through sterile barrier |
| US11653915B2 (en) | 2020-12-02 | 2023-05-23 | Cilag Gmbh International | Surgical instruments with sled location detection and adjustment features |
| US11744581B2 (en) | 2020-12-02 | 2023-09-05 | Cilag Gmbh International | Powered surgical instruments with multi-phase tissue treatment |
| US11890010B2 (en) | 2020-12-02 | 2024-02-06 | Cllag GmbH International | Dual-sided reinforced reload for surgical instruments |
| US11737751B2 (en) | 2020-12-02 | 2023-08-29 | Cilag Gmbh International | Devices and methods of managing energy dissipated within sterile barriers of surgical instrument housings |
| US11678882B2 (en) | 2020-12-02 | 2023-06-20 | Cilag Gmbh International | Surgical instruments with interactive features to remedy incidental sled movements |
| US11701113B2 (en) | 2021-02-26 | 2023-07-18 | Cilag Gmbh International | Stapling instrument comprising a separate power antenna and a data transfer antenna |
| US11744583B2 (en) | 2021-02-26 | 2023-09-05 | Cilag Gmbh International | Distal communication array to tune frequency of RF systems |
| US11793514B2 (en) | 2021-02-26 | 2023-10-24 | Cilag Gmbh International | Staple cartridge comprising sensor array which may be embedded in cartridge body |
| US11950777B2 (en) | 2021-02-26 | 2024-04-09 | Cilag Gmbh International | Staple cartridge comprising an information access control system |
| US11751869B2 (en) | 2021-02-26 | 2023-09-12 | Cilag Gmbh International | Monitoring of multiple sensors over time to detect moving characteristics of tissue |
| US11950779B2 (en) | 2021-02-26 | 2024-04-09 | Cilag Gmbh International | Method of powering and communicating with a staple cartridge |
| US11749877B2 (en) | 2021-02-26 | 2023-09-05 | Cilag Gmbh International | Stapling instrument comprising a signal antenna |
| US11925349B2 (en) | 2021-02-26 | 2024-03-12 | Cilag Gmbh International | Adjustment to transfer parameters to improve available power |
| US11980362B2 (en) | 2021-02-26 | 2024-05-14 | Cilag Gmbh International | Surgical instrument system comprising a power transfer coil |
| US11723657B2 (en) | 2021-02-26 | 2023-08-15 | Cilag Gmbh International | Adjustable communication based on available bandwidth and power capacity |
| US11812964B2 (en) | 2021-02-26 | 2023-11-14 | Cilag Gmbh International | Staple cartridge comprising a power management circuit |
| US11730473B2 (en) | 2021-02-26 | 2023-08-22 | Cilag Gmbh International | Monitoring of manufacturing life-cycle |
| US11696757B2 (en) | 2021-02-26 | 2023-07-11 | Cilag Gmbh International | Monitoring of internal systems to detect and track cartridge motion status |
| US11737749B2 (en) | 2021-03-22 | 2023-08-29 | Cilag Gmbh International | Surgical stapling instrument comprising a retraction system |
| US11826012B2 (en) | 2021-03-22 | 2023-11-28 | Cilag Gmbh International | Stapling instrument comprising a pulsed motor-driven firing rack |
| US11826042B2 (en) | 2021-03-22 | 2023-11-28 | Cilag Gmbh International | Surgical instrument comprising a firing drive including a selectable leverage mechanism |
| US11717291B2 (en) | 2021-03-22 | 2023-08-08 | Cilag Gmbh International | Staple cartridge comprising staples configured to apply different tissue compression |
| US11723658B2 (en) | 2021-03-22 | 2023-08-15 | Cilag Gmbh International | Staple cartridge comprising a firing lockout |
| US11759202B2 (en) | 2021-03-22 | 2023-09-19 | Cilag Gmbh International | Staple cartridge comprising an implantable layer |
| US11806011B2 (en) | 2021-03-22 | 2023-11-07 | Cilag Gmbh International | Stapling instrument comprising tissue compression systems |
| US11793516B2 (en) | 2021-03-24 | 2023-10-24 | Cilag Gmbh International | Surgical staple cartridge comprising longitudinal support beam |
| US11744603B2 (en) | 2021-03-24 | 2023-09-05 | Cilag Gmbh International | Multi-axis pivot joints for surgical instruments and methods for manufacturing same |
| US11903582B2 (en) | 2021-03-24 | 2024-02-20 | Cilag Gmbh International | Leveraging surfaces for cartridge installation |
| US11849945B2 (en) | 2021-03-24 | 2023-12-26 | Cilag Gmbh International | Rotary-driven surgical stapling assembly comprising eccentrically driven firing member |
| US11944336B2 (en) | 2021-03-24 | 2024-04-02 | Cilag Gmbh International | Joint arrangements for multi-planar alignment and support of operational drive shafts in articulatable surgical instruments |
| US11857183B2 (en) | 2021-03-24 | 2024-01-02 | Cilag Gmbh International | Stapling assembly components having metal substrates and plastic bodies |
| US11849944B2 (en) | 2021-03-24 | 2023-12-26 | Cilag Gmbh International | Drivers for fastener cartridge assemblies having rotary drive screws |
| US11786239B2 (en) | 2021-03-24 | 2023-10-17 | Cilag Gmbh International | Surgical instrument articulation joint arrangements comprising multiple moving linkage features |
| US11832816B2 (en) | 2021-03-24 | 2023-12-05 | Cilag Gmbh International | Surgical stapling assembly comprising nonplanar staples and planar staples |
| US11896218B2 (en) | 2021-03-24 | 2024-02-13 | Cilag Gmbh International | Method of using a powered stapling device |
| US11786243B2 (en) | 2021-03-24 | 2023-10-17 | Cilag Gmbh International | Firing members having flexible portions for adapting to a load during a surgical firing stroke |
| US11896219B2 (en) | 2021-03-24 | 2024-02-13 | Cilag Gmbh International | Mating features between drivers and underside of a cartridge deck |
| US20220378426A1 (en) | 2021-05-28 | 2022-12-01 | Cilag Gmbh International | Stapling instrument comprising a mounted shaft orientation sensor |
| US11839440B2 (en) * | 2021-07-30 | 2023-12-12 | Corindus, Inc. | Attachment for robotic medical system |
| TWI795941B (zh) * | 2021-10-08 | 2023-03-11 | 恒昌行精密工業有限公司 | 板對板定位裝置 |
| US11957337B2 (en) | 2021-10-18 | 2024-04-16 | Cilag Gmbh International | Surgical stapling assembly with offset ramped drive surfaces |
| US11980363B2 (en) | 2021-10-18 | 2024-05-14 | Cilag Gmbh International | Row-to-row staple array variations |
| US11877745B2 (en) | 2021-10-18 | 2024-01-23 | Cilag Gmbh International | Surgical stapling assembly having longitudinally-repeating staple leg clusters |
| US11937816B2 (en) | 2021-10-28 | 2024-03-26 | Cilag Gmbh International | Electrical lead arrangements for surgical instruments |
| US11963733B2 (en) * | 2021-12-01 | 2024-04-23 | Nuvasive Inc. | Connector assemblies for connecting a robotic arm with a medical end effector |
| TWI790025B (zh) * | 2021-12-06 | 2023-01-11 | 直得科技股份有限公司 | 機器手臂末端軸機械式自動換刀機構及方法 |
| TWI806612B (zh) * | 2022-05-18 | 2023-06-21 | 直得科技股份有限公司 | 機器手臂末端軸機械式自動換刀機構 |
| US20230373081A1 (en) * | 2022-05-18 | 2023-11-23 | Delaware Capital Formation, Inc. | Robot Mounting Base |
| DE102022114975A1 (de) * | 2022-06-14 | 2023-12-14 | Andreas Maier Gmbh & Co. Kg | Spannvorrichtung zum Einspannen eines Wechselkörpers an einer Spannfläche und Kombination aus einer solchen Spannvorrichtung und einem Wechselkörper |
| CN116725682A (zh) * | 2022-09-06 | 2023-09-12 | 北京和华瑞博医疗科技有限公司 | 连接装置及手术机器人 |
Family Cites Families (80)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2489864A (en) * | 1948-08-17 | 1949-11-29 | Pittsburgh Plate Glass Co | Automatic coupling |
| US3252124A (en) * | 1961-03-10 | 1966-05-17 | Wago Klemmenwerk G M B H | Push-in connector |
| US3430305A (en) | 1967-05-19 | 1969-03-04 | Ted Geffner | Releasable connectors |
| US3741573A (en) * | 1971-07-12 | 1973-06-26 | S Treer | Tool holder for a machine tool or the like |
| US4198110A (en) * | 1978-06-08 | 1980-04-15 | General Energy Development Corp. | Connector |
| US4211461A (en) * | 1978-11-27 | 1980-07-08 | Industrial Electronic Hardware Corp. | Axially mating cable connector |
| FR2542243B1 (fr) * | 1983-03-11 | 1987-01-23 | Syspro | Porte-outil pour robot industriel |
| DE3347423A1 (de) | 1983-12-29 | 1985-07-11 | Rudi 4018 Langenfeld Kirst | Vorrichtung zum automatischen auswechseln und kuppeln von greifern an robotern oder handhabungsgeraeten |
| US4664588A (en) * | 1984-03-09 | 1987-05-12 | Applied Robotics Inc. | Apparatus and method for connecting and exchanging remote manipulable elements to a central control source |
| JPS62100889U (ja) | 1985-12-11 | 1987-06-26 | ||
| US4655630A (en) | 1985-12-31 | 1987-04-07 | Dana Corporation | Robot arm end adapter |
| DE3710472A1 (de) * | 1987-03-30 | 1988-10-20 | Erowa Ag | Vorrichtung zur loesbaren befestigung von werkzeugen an einem handhabungsgeraet |
| US4875275A (en) | 1987-12-07 | 1989-10-24 | Megamation Incoporated | Novel automatic tool changer |
| US4990022A (en) * | 1988-03-07 | 1991-02-05 | Honda Giken Kogyo Kabushiki Kaisha | Robot hand coupling assembly |
| US5069524A (en) * | 1988-03-07 | 1991-12-03 | Honda Giken Kogyo Kabushiki Kaisha | Robot hand optical fiber connector coupling assembly |
| US5018901A (en) * | 1988-07-21 | 1991-05-28 | Space Industries Partnership, L. P. | Ring latched coupler |
| JPH0742627Y2 (ja) * | 1991-03-12 | 1995-10-04 | エスエムシー株式会社 | 産業用ロボットのハンド交換装置 |
| JP3053042B2 (ja) * | 1993-05-14 | 2000-06-19 | 宇部興産株式会社 | 加熱・冷却通路孔を有する成形用金型の製造方法 |
| JPH07328014A (ja) | 1994-06-10 | 1995-12-19 | Olympus Optical Co Ltd | 手術装置 |
| US6331181B1 (en) | 1998-12-08 | 2001-12-18 | Intuitive Surgical, Inc. | Surgical robotic tools, data architecture, and use |
| US9050119B2 (en) | 2005-12-20 | 2015-06-09 | Intuitive Surgical Operations, Inc. | Cable tensioning in a robotic surgical system |
| US7789875B2 (en) | 1998-02-24 | 2010-09-07 | Hansen Medical, Inc. | Surgical instruments |
| JP3053042U (ja) | 1998-04-08 | 1998-10-13 | 株式会社大協器械製作所 | 手術用の撮影機取付アーム |
| US6451027B1 (en) | 1998-12-16 | 2002-09-17 | Intuitive Surgical, Inc. | Devices and methods for moving an image capture device in telesurgical systems |
| US6788018B1 (en) | 1999-08-03 | 2004-09-07 | Intuitive Surgical, Inc. | Ceiling and floor mounted surgical robot set-up arms |
| FR2797789B1 (fr) * | 1999-08-30 | 2001-11-23 | Sames Sa | Procede et dispositif de montage d'un sous-ensemble comprenant au moins un projecteur de produit de revetement sur une partie mobile d'un robot |
| US8004229B2 (en) | 2005-05-19 | 2011-08-23 | Intuitive Surgical Operations, Inc. | Software center and highly configurable robotic systems for surgery and other uses |
| US7594912B2 (en) | 2004-09-30 | 2009-09-29 | Intuitive Surgical, Inc. | Offset remote center manipulator for robotic surgery |
| JP2001129038A (ja) | 1999-11-08 | 2001-05-15 | Mizuho Co Ltd | 手術台 |
| US6457916B2 (en) | 1999-11-15 | 2002-10-01 | Insty-Bit, Inc. | Locking quick-change chuck assembly |
| NO311816B1 (no) * | 2000-04-13 | 2002-01-28 | Knut Ove Steinhovden | Utlösbar låseanordning for mekanisk kopling |
| US6491612B1 (en) * | 2000-10-23 | 2002-12-10 | Ati Industrial Automation, Inc. | Stud welding tool changer |
| US6533594B1 (en) * | 2000-11-16 | 2003-03-18 | Ati Industrial Automation | Apparatus and method for transferring secondary current across a robotic tool changer |
| NL1016794C1 (nl) * | 2000-12-05 | 2002-06-06 | Imc Corporate Licensing | Automatisch koppelingsmechaniek. |
| US6478503B1 (en) * | 2001-06-26 | 2002-11-12 | Pao-Hsien Cheng | Locking device for a detachable handrest of a stroller |
| DE10154876C1 (de) * | 2001-11-06 | 2003-02-13 | Schunk Gmbh & Co Kg | Werkzeugwechselsystem |
| US7331967B2 (en) | 2002-09-09 | 2008-02-19 | Hansen Medical, Inc. | Surgical instrument coupling mechanism |
| GB2397234A (en) | 2003-01-20 | 2004-07-21 | Armstrong Healthcare Ltd | A tool holder arrangement |
| US6840895B2 (en) | 2003-03-12 | 2005-01-11 | Ati Industrial Automation, Inc. | Tool side robotic safety interlock |
| DE10313170B3 (de) * | 2003-03-25 | 2004-08-26 | Otto Ganter Gmbh & Co. Kg Normteilefabrik | Steckbolzen mit druckknopfbetätigter Axialsicherung und freier Lagerung |
| DE10317340A1 (de) * | 2003-04-15 | 2004-11-04 | Ssa System-Spann Ag | Hochdruckkupplung für die Mediendurchführung an Schnellwechselsystemen |
| DE102004006418A1 (de) * | 2004-02-09 | 2005-08-25 | Zero-Point-Systems Günther Stark GmbH | Schnellspannzylinder mit Sicherheitsvorrichtung gegen Blockierung |
| US7379790B2 (en) | 2004-05-04 | 2008-05-27 | Intuitive Surgical, Inc. | Tool memory-based software upgrades for robotic surgery |
| CA2599350A1 (en) | 2005-03-04 | 2006-09-08 | Breeze-Torca Products, Llc | Pipe clamp assembly with v-ring insert |
| US7789874B2 (en) | 2005-05-03 | 2010-09-07 | Hansen Medical, Inc. | Support assembly for robotic catheter system |
| DE102005031784A1 (de) * | 2005-07-07 | 2007-01-11 | Zero-Point-Systems Günther Stark GmbH | Schnellspann-Vorrichtung mit Austauschzylinder |
| US8672922B2 (en) | 2005-12-20 | 2014-03-18 | Intuitive Surgical Operations, Inc. | Wireless communication in a robotic surgical system |
| EP1815950A1 (en) | 2006-02-03 | 2007-08-08 | The European Atomic Energy Community (EURATOM), represented by the European Commission | Robotic surgical system for performing minimally invasive medical procedures |
| EP1815949A1 (en) * | 2006-02-03 | 2007-08-08 | The European Atomic Energy Community (EURATOM), represented by the European Commission | Medical robotic system with manipulator arm of the cylindrical coordinate type |
| US8601667B2 (en) * | 2006-04-04 | 2013-12-10 | Ati Industrial Automation, Inc. | Rotating coupling for robotic tool changer with actuation mechanism |
| US8132816B2 (en) | 2006-04-04 | 2012-03-13 | Ati Industrial Automation, Inc. | Electrically Actuated Robotic Tool Changer |
| JP4126074B1 (ja) | 2007-03-13 | 2008-07-30 | 株式会社スター精機 | ロボットアームカップリング装置 |
| DE102007022186A1 (de) * | 2007-05-11 | 2008-11-13 | Robert Bosch Gmbh | Adapter zum Betreiben einer Lochsäge an einer Antriebsmaschine |
| US9144909B2 (en) | 2007-07-05 | 2015-09-29 | Re2, Inc. | Defense related robotic systems |
| GB0717023D0 (en) | 2007-09-01 | 2007-10-10 | Torque Tension Systems Ltd | A device for locking a first component to a second |
| US8400094B2 (en) | 2007-12-21 | 2013-03-19 | Intuitive Surgical Operations, Inc. | Robotic surgical system with patient support |
| US8126114B2 (en) | 2008-09-12 | 2012-02-28 | Accuray Incorporated | Seven or more degrees of freedom robotic manipulator having at least one redundant joint |
| US8747288B2 (en) | 2009-02-04 | 2014-06-10 | Ati Industrial Automation, Inc. | Power control of a robotic tool changer |
| US9254572B2 (en) | 2009-02-04 | 2016-02-09 | Ati Industrial Automation, Inc. | Power control of a robotic tool changer |
| JP5368872B2 (ja) | 2009-05-15 | 2013-12-18 | ココ株式会社 | アーム構造及び手術用具の保持装置 |
| US8992113B2 (en) | 2009-06-08 | 2015-03-31 | Re2, Inc. | Robust manual connector for robotic arm end effector |
| DE102009031533A1 (de) * | 2009-07-02 | 2010-02-11 | Daimler Ag | Befestigungsanordnung eines Verkleidungsteils für einen Innenraum eines Kraftwagens an einem tragenden Bauteil |
| US8926484B1 (en) * | 2010-03-29 | 2015-01-06 | Stratasys, Inc. | Head tool changer for use with deposition-based digital manufacturing systems |
| US8777230B2 (en) * | 2010-05-04 | 2014-07-15 | The Gleason Works | Device for securing a tool to a spindle |
| AR086991A1 (es) * | 2011-06-20 | 2014-02-05 | Newfrey Llc | Conjunto de cerradura pomo electronica accionada manualmente con bisel giratorio |
| CN117398193A (zh) | 2012-06-01 | 2024-01-16 | 直观外科手术操作公司 | 硬件受限的远程中心机器人操纵器的冗余轴线和自由度 |
| ITTV20120129A1 (it) * | 2012-07-11 | 2014-01-12 | Almerino Canuto | Dispositivo di compensazione del disassamento in sistemi di bloccaggio automatici |
| US9115744B1 (en) * | 2012-07-19 | 2015-08-25 | Lockheed Martin Corporation | Captive fastener with engaging and locking mechanism |
| JP6195333B2 (ja) * | 2012-08-08 | 2017-09-13 | キヤノン株式会社 | ロボット装置 |
| CN104661612B (zh) | 2012-11-30 | 2017-04-05 | 奥林巴斯株式会社 | 手术支持系统和手术支持系统的控制方法 |
| KR20150017129A (ko) | 2013-08-06 | 2015-02-16 | 삼성전자주식회사 | 수술 로봇 시스템 및 그 제어 방법 |
| US10441372B2 (en) * | 2014-03-17 | 2019-10-15 | Intuitive Surgical Operations, Inc. | Manipulator arm having connection interface, and related devices and systems |
| JP6535496B2 (ja) | 2014-03-31 | 2019-06-26 | 学校法人慶應義塾 | 医療用処置具把持具 |
| US11097390B2 (en) * | 2014-08-20 | 2021-08-24 | Ati Industrial Automation, Inc. | Pneumatic safety interlock |
| US10661449B2 (en) * | 2014-08-20 | 2020-05-26 | Ati Industrial Automation, Inc. | Safe robotic tool changer |
| MX2016011260A (es) * | 2015-02-16 | 2016-11-30 | Norgren Automation Solutions Llc | Aparato de desconexion rapida para herramientas modulares. |
| US9505368B2 (en) | 2015-02-27 | 2016-11-29 | Tk Holdings Inc. | Fastener and fastening system for an airbag assembly |
| JP6030718B1 (ja) | 2015-07-03 | 2016-11-24 | 上銀科技股▲分▼有限公司 | 末端効果器を交換する機械式交換装置 |
| US9827615B2 (en) * | 2015-12-10 | 2017-11-28 | Hsu-Pin Chuang | Float type clamping mechanism |
| KR101887538B1 (ko) * | 2016-06-23 | 2018-08-10 | 한국과학기술연구원 | 무성별 결합이 가능한 모듈 연결장치 |
-
2018
- 2018-03-23 US US15/934,709 patent/US11078945B2/en active Active
- 2018-03-26 CA CA3054431A patent/CA3054431C/en active Active
- 2018-03-26 WO PCT/US2018/024393 patent/WO2018183212A1/en unknown
- 2018-03-26 CN CN201880021052.3A patent/CN110709025B/zh active Active
- 2018-03-26 KR KR1020197027941A patent/KR102326102B1/ko active IP Right Grant
- 2018-03-26 JP JP2019551299A patent/JP6905162B2/ja active Active
- 2018-03-26 EP EP18774510.4A patent/EP3579783A4/en active Pending
- 2018-03-26 AU AU2018243738A patent/AU2018243738B2/en active Active
-
2021
- 2021-07-01 US US17/365,766 patent/US20210341007A1/en active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| KR20190112829A (ko) | 2019-10-07 |
| CN110709025A (zh) | 2020-01-17 |
| BR112019017981A2 (pt) | 2020-05-19 |
| KR102326102B1 (ko) | 2021-11-17 |
| US20210341007A1 (en) | 2021-11-04 |
| EP3579783A4 (en) | 2020-12-16 |
| AU2018243738B2 (en) | 2021-08-12 |
| CA3054431C (en) | 2023-07-25 |
| US20180271604A1 (en) | 2018-09-27 |
| AU2018243738A1 (en) | 2019-09-12 |
| CA3054431A1 (en) | 2018-10-04 |
| JP2020512076A (ja) | 2020-04-23 |
| EP3579783A1 (en) | 2019-12-18 |
| CN110709025B (zh) | 2024-03-01 |
| WO2018183212A1 (en) | 2018-10-04 |
| US11078945B2 (en) | 2021-08-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6905162B2 (ja) | ロボットアームを外科用テーブルに取り付けるためのカプラ | |
| JP6918975B2 (ja) | ロックスイベル接合部及び他の位置決め調節特徴を有するロボットアームカート、並びにそのための使用 | |
| AU2016243292B2 (en) | Rapidly repositionable powered support arm | |
| US20160120611A1 (en) | Medical Robot | |
| JP2018509273A5 (ja) | ||
| US11497571B2 (en) | Surgical robotic system with carriage and manipulator unit | |
| JP6972357B2 (ja) | ロボット手術システムおよび器具駆動アセンブリ | |
| WO2018111575A1 (en) | Quick release coupler | |
| US20190298597A1 (en) | Surgical head fixation apparatus | |
| JP6091637B2 (ja) | 医療用保持アーム | |
| JP7069334B2 (ja) | ロボット手術システムおよび器具駆動アセンブリ | |
| JP2014046365A (ja) | 結合装置のためのホルダ | |
| CN216098986U (zh) | 一种机器人末端快换装置 | |
| CN219557541U (zh) | 具有快拆结构的穿刺针夹持结构及手术导航定位机器人 | |
| CN219480273U (zh) | 穿刺针夹持结构及手术导航定位机器人 | |
| US20190357993A1 (en) | Holding Device And Method For Locking The Holding Device | |
| BR112019017981B1 (pt) | Acoplador para fixar um braço robótico a uma mesa cirúrgica | |
| WO2014178202A1 (ja) | 球面ジョイント機構及びこの球面ジョイント機構を備えた組立て装置 | |
| CN219048746U (zh) | 同步释放型电动末端执行器及手术导航定位机器人 | |
| JP7057782B2 (ja) | 固定デバイスを有する患者支持面モジュール | |
| CN219557494U (zh) | 便于安拆的穿刺针夹持结构及手术导航定位机器人 | |
| CN219557492U (zh) | 可快速释放的穿刺针夹持结构及手术导航定位机器人 | |
| KR102133069B1 (ko) | 파이프 가공 장치 및 파이프 가공 장치의 작동 방법 | |
| EP3224002B1 (en) | Jointed stall bar attachment | |
| CN116687471A (zh) | 外科手术器械及其运动范围控制方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191007 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200930 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201013 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201228 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210112 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210219 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210323 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20210415 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20210415 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210422 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20210420 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6905162 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |