JP6898285B2 - 手術システムおよび表示方法 - Google Patents
手術システムおよび表示方法 Download PDFInfo
- Publication number
- JP6898285B2 JP6898285B2 JP2018179277A JP2018179277A JP6898285B2 JP 6898285 B2 JP6898285 B2 JP 6898285B2 JP 2018179277 A JP2018179277 A JP 2018179277A JP 2018179277 A JP2018179277 A JP 2018179277A JP 6898285 B2 JP6898285 B2 JP 6898285B2
- Authority
- JP
- Japan
- Prior art keywords
- pedal
- area
- foot
- surgical instrument
- operator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 11
- 230000015271 coagulation Effects 0.000 claims description 113
- 238000005345 coagulation Methods 0.000 claims description 113
- 238000002360 preparation method Methods 0.000 claims description 71
- 238000005520 cutting process Methods 0.000 claims description 42
- 230000008859 change Effects 0.000 claims description 9
- 238000001514 detection method Methods 0.000 claims description 9
- 230000001112 coagulating effect Effects 0.000 claims description 4
- 238000001356 surgical procedure Methods 0.000 claims description 4
- 230000008569 process Effects 0.000 claims description 3
- 230000006870 function Effects 0.000 description 29
- 238000007711 solidification Methods 0.000 description 19
- 230000008023 solidification Effects 0.000 description 19
- 238000007789 sealing Methods 0.000 description 8
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 description 6
- 239000012636 effector Substances 0.000 description 6
- 230000036544 posture Effects 0.000 description 4
- 230000005611 electricity Effects 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 239000011521 glass Substances 0.000 description 2
- 238000003860 storage Methods 0.000 description 2
- 230000000903 blocking effect Effects 0.000 description 1
- 239000003086 colorant Substances 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000003028 elevating effect Effects 0.000 description 1
- 238000002324 minimally invasive surgery Methods 0.000 description 1
- 244000144985 peep Species 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000000284 resting effect Effects 0.000 description 1
- 210000000707 wrist Anatomy 0.000 description 1
Images


















Classifications
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H40/00—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices
- G16H40/60—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices for the operation of medical equipment or devices
- G16H40/63—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices for the operation of medical equipment or devices for local operation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00039—Operational features of endoscopes provided with input arrangements for the user
- A61B1/00042—Operational features of endoscopes provided with input arrangements for the user for mechanical operation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/00149—Holding or positioning arrangements using articulated arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/0016—Holding or positioning arrangements using motor drive units
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/05—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances characterised by the image sensor, e.g. camera, being in the distal end portion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/1206—Generators therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/25—User interfaces for surgical systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/35—Surgical robots for telesurgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Master-slave robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/361—Image-producing devices, e.g. surgical cameras
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H20/00—ICT specially adapted for therapies or health-improving plans, e.g. for handling prescriptions, for steering therapy or for monitoring patient compliance
- G16H20/40—ICT specially adapted for therapies or health-improving plans, e.g. for handling prescriptions, for steering therapy or for monitoring patient compliance relating to mechanical, radiation or invasive therapies, e.g. surgery, laser therapy, dialysis or acupuncture
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1482—Probes or electrodes therefor having a long rigid shaft for accessing the inner body transcutaneously in minimal invasive surgery, e.g. laparoscopy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00477—Coupling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00973—Surgical instruments, devices or methods, e.g. tourniquets pedal-operated
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00571—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for achieving a particular surgical effect
- A61B2018/00589—Coagulation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00571—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for achieving a particular surgical effect
- A61B2018/00601—Cutting
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00571—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for achieving a particular surgical effect
- A61B2018/0063—Sealing
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/1206—Generators therefor
- A61B2018/1246—Generators therefor characterised by the output polarity
- A61B2018/1253—Generators therefor characterised by the output polarity monopolar
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/1206—Generators therefor
- A61B2018/1246—Generators therefor characterised by the output polarity
- A61B2018/126—Generators therefor characterised by the output polarity bipolar
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/301—Surgical robots for introducing or steering flexible instruments inserted into the body, e.g. catheters or endoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/302—Surgical robots specifically adapted for manipulations within body cavities, e.g. within abdominal or thoracic cavities
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Surgery (AREA)
- Biomedical Technology (AREA)
- Medical Informatics (AREA)
- Public Health (AREA)
- General Health & Medical Sciences (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Veterinary Medicine (AREA)
- Heart & Thoracic Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Molecular Biology (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Robotics (AREA)
- Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Biophysics (AREA)
- Primary Health Care (AREA)
- Epidemiology (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Human Computer Interaction (AREA)
- Business, Economics & Management (AREA)
- General Business, Economics & Management (AREA)
- Mechanical Engineering (AREA)
- Gynecology & Obstetrics (AREA)
- Plasma & Fusion (AREA)
- Otolaryngology (AREA)
- Urology & Nephrology (AREA)
- Manipulator (AREA)
Description
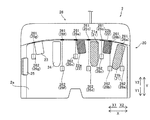
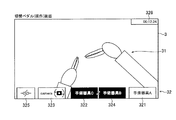
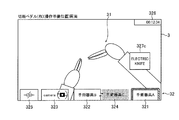
この発明の第2の局面による表示方法は、手術システムにおける情報の表示方法であって、手術システムは、内視鏡、第1手術器具および第2手術器具を各々支持するための複数のマニピュレータと、内視鏡によって撮像された画像を表示するための表示装置、第1手術器具を操作するための第1操作ハンドル、第2手術器具を操作するための第2操作ハンドルおよび複数のフットペダルを有する操作ペダル部を含む遠隔操作装置と、少なくとも表示装置を制御するように構成された制御装置と、を備え、操作ペダル部は、それぞれのフットペダル上の操作準備位置に操作者の足が配置されたことを検出するための複数のセンサを含み、複数のフットペダルは、第1手術器具に関する機能を実行させるための第1フットペダルと、第2手術器具に関する機能を実行させるための第2フットペダルと、内視鏡に関する機能を実行させるための第3フットペダルと、を有しており、第1手術器具に関する情報を示す第1エリアと、第2手術器具に関する情報を示す第2エリアと、内視鏡に関する情報を示す第3エリアと、を配置したグラフィカルユーザインタフェースを内視鏡によって撮像された画像上に重ねて表示装置に表示する工程と、第1フットペダル、第2フットペダルおよび第3フットペダルのうちの少なくとも1つのフットペダルの操作準備位置に操作者の足が配置されたことを、複数のセンサのうちの少なくとも1つのセンサにより検出したことに基づいて、第1エリア、第2エリアおよび第3エリアのうちの対応するエリアの一部の範囲を強調表示するとともに、第1エリア、第2エリアおよび第3エリアとは異なる位置に、操作準備位置に操作者の足が配置されたフットペダルに関するペダル情報をポップアップ表示する操作準備表示工程と、第1フットペダル、第2フットペダルまたは第3フットペダルが操作された場合に、第1エリア、第2エリアおよび第3エリアのうちの対応するエリアに、フットペダルの操作準備位置に操作者の足が配置された場合よりも大きい範囲を強調表示するペダル操作表示工程と、を備える。
図1〜図21を参照して、一実施形態による手術システム400の構成について説明する。
なお、今回開示された実施形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した実施形態の説明ではなく特許請求の範囲によって示され、さらに特許請求の範囲と均等の意味および範囲内でのすべての変更(変形例)が含まれる。
Claims (12)
- 手術部位の画像を撮像する内視鏡、第1手術器具および第2手術器具を各々支持するための複数のマニピュレータと、
前記内視鏡によって撮像された画像を表示するための表示装置と、前記第1手術器具を操作するための第1操作ハンドルと、前記第2手術器具を操作するための第2操作ハンドルと、複数のフットペダルを有する操作ペダル部と、を含む遠隔操作装置と、
少なくとも前記表示装置を制御するように構成された制御装置と、を備え、
前記操作ペダル部は、それぞれの前記フットペダル上の操作準備位置に操作者の足が配置されたことを検出するための複数のセンサを含み、
複数の前記フットペダルは、前記第1手術器具に関する機能を実行させるための第1フットペダルと、前記第2手術器具に関する機能を実行させるための第2フットペダルと、前記内視鏡に関する機能を実行させるための第3フットペダルと、を有しており、
前記制御装置は、前記第1手術器具に関する情報を示す第1エリアと、前記第2手術器具に関する情報を示す第2エリアと、前記内視鏡に関する情報を示す第3エリアと、を配置したグラフィカルユーザインタフェースを前記内視鏡によって撮像された画像上に重ねて前記表示装置に表示するように構成されており、
前記制御装置は、前記第1フットペダル、前記第2フットペダルおよび前記第3フットペダルのうちの少なくとも1つの前記フットペダルの操作準備位置に操作者の足が配置されたことを、前記複数のセンサのうちの少なくとも1つのセンサにより検出したことに基づいて、前記第1エリア、前記第2エリアおよび前記第3エリアのうちの対応するエリアの一部の範囲を強調表示するとともに、前記第1エリア、前記第2エリアおよび前記第3エリアとは異なる位置に、操作準備位置に操作者の足が配置された前記フットペダルに関するペダル情報をポップアップ表示し、前記第1フットペダル、前記第2フットペダルまたは前記第3フットペダルが操作された場合に、前記第1エリア、前記第2エリアおよび前記第3エリアのうちの対応するエリアに、前記フットペダルの操作準備位置に操作者の足が配置された場合よりも大きい範囲を強調表示するように構成されている、手術システム。 - 前記グラフィカルユーザインタフェースは、前記表示装置の下方の端部近傍領域または上方の端部近傍領域に配置される前記第1エリア、前記第2エリアおよび前記第3エリアを含む、請求項1に記載の手術システム。
- エリアの強調表示は、表示色の変更、反転表示、エリアの枠線の表示変更のうち少なくとも1つを含む、請求項1または2に記載の手術システム。
- 前記第1エリアには、前記第1手術器具の種類が表示され、
前記第2エリアには、前記第2手術器具の種類が表示され、
前記第3エリアには、前記内視鏡を示す文字又は図柄の情報が表示される、請求項1〜3のいずれか1項に記載の手術システム。 - 前記第1フットペダルは、手術部位を凝固させる操作を行う第1凝固ペダルと、手術部位を切断する操作を行う第1切断ペダルと、を有し、
前記第2フットペダルは、手術部位を凝固させる操作を行う第2凝固ペダルと、手術部位を切断する操作を行う第2切断ペダルと、を有し、
前記第1凝固ペダルおよび前記第2凝固ペダルは、第1の色を有し、
前記第1切断ペダルおよび前記第2切断ペダルは、前記第1の色とは異なる第2の色を有し、
前記制御装置は、前記第1凝固ペダルまたは前記第2凝固ペダルの操作準備位置に操作者の足が配置されたことを、前記複数のセンサのうちの少なくとも1つのセンサにより検出したことに基づいて、前記第1エリアおよび前記第2エリアのうちの対応するエリアの一部の領域を前記第1の色により強調表示し、前記第1切断ペダルまたは前記第2切断ペダルの操作準備位置に操作者の足が配置されたことを、前記複数のセンサのうちの少なくとも1つのセンサにより検出したことに基づいて、前記第1エリアおよび前記第2エリアのうちの対応するエリアの一部の領域を前記第2の色により強調表示するように構成されている、請求項1〜4のいずれか1項に記載の手術システム。 - 前記第1凝固ペダルが操作された場合に、操作準備位置に操作者の足が配置された場合よりも前記第1エリアの大きい範囲が前記第1の色により強調表示され、
前記第1切断ペダルが操作された場合に、操作準備位置に操作者の足が配置された場合よりも前記第1エリアの大きい範囲が前記第2の色により強調表示され、
前記第2凝固ペダルが操作された場合に、操作準備位置に操作者の足が配置された場合よりも前記第2エリアの大きい範囲が前記第1の色により強調表示され、
前記第2切断ペダルが操作された場合に、操作準備位置に操作者の足が配置された場合よりも前記第2エリアの大きい範囲が前記第2の色により強調表示される、請求項5に記載の手術システム。 - 前記制御装置は、前記第1フットペダル、前記第2フットペダルまたは前記第3フットペダルが操作された場合に、前記第1エリア、前記第2エリアおよび前記第3エリアのうちの対応するエリア全体を強調表示するように構成されている、請求項1〜6のいずれか1項に記載の手術システム。
- 前記複数のマニピュレータのうちの1つのマニピュレータは、交換用手術器具を支持しており、
前記操作ペダル部は、前記第1操作ハンドルにより操作されている前記第1手術器具または前記第2操作ハンドルにより操作されている前記第2手術器具を前記交換用手術器具に変更するための第4フットペダルをさらに含み、
前記グラフィカルユーザインタフェースは、前記第1エリアと前記第2エリアとの間に配置された前記交換用手術器具に関する情報を示す第4エリアを含む、請求項1〜7のいずれか1項に記載の手術システム。 - 前記操作ペダル部は、クラッチ機能を実行させるための第5フットペダルをさらに含み、
前記グラフィカルユーザインタフェースは、前記クラッチ機能に関する情報を示す第5エリアを含む、請求項1〜8のいずれか1項に記載の手術システム。 - 前記制御装置は、前記第3フットペダルが操作された場合に、前記内視鏡の水準器を示す表示を含む前記グラフィカルユーザインタフェースを前記画像に重ねて表示するように構成されている、請求項1〜9のいずれか1項に記載の手術システム。
- 前記グラフィカルユーザインタフェースの各エリアは、各フットペダルの操作準備位置に操作者の足が配置された場合、各エリアの枠線が強調表示されるように構成されている、請求項1〜10のいずれか1項に記載の手術システム。
- 手術システムにおける情報の表示方法であって、
前記手術システムは、内視鏡、第1手術器具および第2手術器具を各々支持するための複数のマニピュレータと、前記内視鏡によって撮像された画像を表示するための表示装置、前記第1手術器具を操作するための第1操作ハンドル、前記第2手術器具を操作するための第2操作ハンドルおよび複数のフットペダルを有する操作ペダル部を含む遠隔操作装置と、少なくとも前記表示装置を制御するように構成された制御装置と、を備え、
前記操作ペダル部は、それぞれの前記フットペダル上の操作準備位置に操作者の足が配置されたことを検出するための複数のセンサを含み、
複数の前記フットペダルは、前記第1手術器具に関する機能を実行させるための第1フットペダルと、前記第2手術器具に関する機能を実行させるための第2フットペダルと、前記内視鏡に関する機能を実行させるための第3フットペダルと、を有しており、
前記第1手術器具に関する情報を示す第1エリアと、前記第2手術器具に関する情報を示す第2エリアと、前記内視鏡に関する情報を示す第3エリアと、を配置したグラフィカルユーザインタフェースを前記内視鏡によって撮像された画像上に重ねて前記表示装置に表示する工程と、
前記第1フットペダル、前記第2フットペダルおよび前記第3フットペダルのうちの少なくとも1つの前記フットペダルの操作準備位置に操作者の足が配置されたことを、前記複数のセンサのうちの少なくとも1つのセンサにより検出したことに基づいて、前記第1エリア、前記第2エリアおよび前記第3エリアのうちの対応するエリアの一部の範囲を強調表示するとともに、前記第1エリア、前記第2エリアおよび前記第3エリアとは異なる位置に、操作準備位置に操作者の足が配置された前記フットペダルに関するペダル情報をポップアップ表示する操作準備表示工程と、
前記第1フットペダル、前記第2フットペダルまたは前記第3フットペダルが操作された場合に、前記第1エリア、前記第2エリアおよび前記第3エリアのうちの対応するエリアに、前記フットペダルの操作準備位置に操作者の足が配置された場合よりも大きい範囲を強調表示するペダル操作表示工程と、を備える、表示方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018179277A JP6898285B2 (ja) | 2018-09-25 | 2018-09-25 | 手術システムおよび表示方法 |
| US16/579,763 US20200093552A1 (en) | 2018-09-25 | 2019-09-23 | Surgical system and method of displaying information in the same |
| EP19199588.5A EP3628207B1 (en) | 2018-09-25 | 2019-09-25 | Surgical system and method of displaying information in the same |
| JP2021097237A JP7155344B2 (ja) | 2018-09-25 | 2021-06-10 | 手術システムおよび表示方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018179277A JP6898285B2 (ja) | 2018-09-25 | 2018-09-25 | 手術システムおよび表示方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021097237A Division JP7155344B2 (ja) | 2018-09-25 | 2021-06-10 | 手術システムおよび表示方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020048708A JP2020048708A (ja) | 2020-04-02 |
| JP6898285B2 true JP6898285B2 (ja) | 2021-07-07 |
Family
ID=68069564
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018179277A Active JP6898285B2 (ja) | 2018-09-25 | 2018-09-25 | 手術システムおよび表示方法 |
| JP2021097237A Active JP7155344B2 (ja) | 2018-09-25 | 2021-06-10 | 手術システムおよび表示方法 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021097237A Active JP7155344B2 (ja) | 2018-09-25 | 2021-06-10 | 手術システムおよび表示方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20200093552A1 (ja) |
| EP (1) | EP3628207B1 (ja) |
| JP (2) | JP6898285B2 (ja) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU2019345238A1 (en) | 2018-09-17 | 2021-03-18 | Covidien Lp | Foot pedal assignment for robotic surgical systems |
| US11830602B2 (en) | 2020-10-02 | 2023-11-28 | Cilag Gmbh International | Surgical hub having variable interconnectivity capabilities |
| US11992372B2 (en) | 2020-10-02 | 2024-05-28 | Cilag Gmbh International | Cooperative surgical displays |
| US11672534B2 (en) | 2020-10-02 | 2023-06-13 | Cilag Gmbh International | Communication capability of a smart stapler |
| US11748924B2 (en) | 2020-10-02 | 2023-09-05 | Cilag Gmbh International | Tiered system display control based on capacity and user operation |
| US11911030B2 (en) | 2020-10-02 | 2024-02-27 | Cilag Gmbh International | Communication capability of a surgical device with component |
| US11877897B2 (en) | 2020-10-02 | 2024-01-23 | Cilag Gmbh International | Situational awareness of instruments location and individualization of users to control displays |
| US11883022B2 (en) | 2020-10-02 | 2024-01-30 | Cilag Gmbh International | Shared situational awareness of the device actuator activity to prioritize certain aspects of displayed information |
| US12064293B2 (en) | 2020-10-02 | 2024-08-20 | Cilag Gmbh International | Field programmable surgical visualization system |
| US11963683B2 (en) | 2020-10-02 | 2024-04-23 | Cilag Gmbh International | Method for operating tiered operation modes in a surgical system |
| US11877792B2 (en) | 2020-10-02 | 2024-01-23 | Cilag Gmbh International | Smart energy combo control options |
| US11883052B2 (en) | 2020-10-02 | 2024-01-30 | Cilag Gmbh International | End effector updates |
| US12016566B2 (en) | 2020-10-02 | 2024-06-25 | Cilag Gmbh International | Surgical instrument with adaptive function controls |
| US20240090962A1 (en) * | 2020-11-30 | 2024-03-21 | Intuitive Surgical Operations, Inc. | Systems and methods for providing synthetic indicators in a user interface for a robot-assisted system |
| CN112890954B (zh) * | 2020-12-30 | 2022-08-09 | 北京和华瑞博医疗科技有限公司 | 机械臂运动控制方法、系统及外科手术系统 |
| JP2022115264A (ja) * | 2021-01-28 | 2022-08-09 | 株式会社メディカロイド | 手術システムおよび表示方法 |
| JP7350910B2 (ja) * | 2022-01-31 | 2023-09-26 | 株式会社メディカロイド | 操作ペダル装置および遠隔操作装置 |
| JP2024036816A (ja) * | 2022-09-06 | 2024-03-18 | 川崎重工業株式会社 | 手術支援システムおよび操作装置の制御方法 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4207901C3 (de) * | 1992-03-12 | 1999-10-07 | Aesculap Ag & Co Kg | Verfahren und Vorrichtung zur Darstellung eines Arbeitsbereiches in einer dreidimensionalen Struktur |
| US6120433A (en) * | 1994-09-01 | 2000-09-19 | Olympus Optical Co., Ltd. | Surgical manipulator system |
| JP4129313B2 (ja) * | 1998-05-19 | 2008-08-06 | オリンパス株式会社 | 医療システムの制御装置 |
| JP2002238919A (ja) * | 2001-02-20 | 2002-08-27 | Olympus Optical Co Ltd | 医療システム用制御装置及び医療システム |
| MX2007005192A (es) * | 2004-11-01 | 2007-11-08 | Stryker Corp | Transmision segura de control inalambrico a unidad central. |
| JP4916011B2 (ja) * | 2007-03-20 | 2012-04-11 | 株式会社日立製作所 | マスタ・スレーブ式マニピュレータシステム |
| US8423182B2 (en) * | 2009-03-09 | 2013-04-16 | Intuitive Surgical Operations, Inc. | Adaptable integrated energy control system for electrosurgical tools in robotic surgical systems |
| US8120301B2 (en) * | 2009-03-09 | 2012-02-21 | Intuitive Surgical Operations, Inc. | Ergonomic surgeon control console in robotic surgical systems |
| US8418073B2 (en) | 2009-03-09 | 2013-04-09 | Intuitive Surgical Operations, Inc. | User interfaces for electrosurgical tools in robotic surgical systems |
| IT1401669B1 (it) * | 2010-04-07 | 2013-08-02 | Sofar Spa | Sistema di chirurgia robotizzata con controllo perfezionato. |
| US8600432B2 (en) * | 2010-07-16 | 2013-12-03 | Ari Krupnik | Methods and apparatus for leveraging a mobile phone or mobile computing device for use in controlling model vehicles |
| JP6021353B2 (ja) * | 2011-08-04 | 2016-11-09 | オリンパス株式会社 | 手術支援装置 |
| CN109846553B (zh) * | 2012-09-17 | 2022-03-08 | 直观外科手术操作公司 | 针对远程操作的手术器械功能分配输入设备的方法和系统 |
| US9681982B2 (en) * | 2012-12-17 | 2017-06-20 | Alcon Research, Ltd. | Wearable user interface for use with ocular surgical console |
| US10932871B2 (en) * | 2012-12-25 | 2021-03-02 | Kawasaki Jukogyo Kabushiki Kaisha | Surgical robot |
| US10806531B2 (en) * | 2015-06-12 | 2020-10-20 | Intuitive Surgical Operations, Inc. | User interfaces and displays for flux supply units |
| JP6950707B2 (ja) * | 2016-11-28 | 2021-10-13 | ソニーグループ株式会社 | 情報処理装置および方法、並びにプログラム |
| CN110381873A (zh) * | 2017-03-15 | 2019-10-25 | 柯惠Lp公司 | 机器人外科手术系统、器械和控件 |
| WO2018211969A1 (ja) * | 2017-05-15 | 2018-11-22 | ソニー株式会社 | 入力制御装置、入力制御方法、および手術システム |
-
2018
- 2018-09-25 JP JP2018179277A patent/JP6898285B2/ja active Active
-
2019
- 2019-09-23 US US16/579,763 patent/US20200093552A1/en active Pending
- 2019-09-25 EP EP19199588.5A patent/EP3628207B1/en active Active
-
2021
- 2021-06-10 JP JP2021097237A patent/JP7155344B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP3628207B1 (en) | 2022-05-18 |
| EP3628207A1 (en) | 2020-04-01 |
| JP2021151519A (ja) | 2021-09-30 |
| US20200093552A1 (en) | 2020-03-26 |
| JP7155344B2 (ja) | 2022-10-18 |
| JP2020048708A (ja) | 2020-04-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6898285B2 (ja) | 手術システムおよび表示方法 | |
| JP6856594B2 (ja) | 手術システムおよび表示方法 | |
| JP7080861B2 (ja) | 手術システム | |
| JP6599402B2 (ja) | 遠隔操作装置 | |
| KR102085678B1 (ko) | 로봇 수술 시스템의 전기수술 도구에 사용되는 적응형 통합 에너지 컨트롤 시스템 | |
| CN107028662B (zh) | 远程操作装置及远程手术系统 | |
| CN110226967A (zh) | 用于远程操作医疗系统的结构调整系统和方法 | |
| US20190314005A1 (en) | Remote control apparatus, surgical system, and method of identifying target pedal | |
| JP6902639B2 (ja) | 手術システム | |
| JP2020044354A (ja) | 遠隔操作装置および遠隔操作システム | |
| JP6778326B2 (ja) | マスタ操作入力装置およびマスタスレーブマニピュレータ | |
| JP7016400B2 (ja) | 手術システムおよび表示方法 | |
| JP6745392B2 (ja) | 遠隔操作装置 | |
| KR20120045734A (ko) | 수술용 로봇 시스템의 마스터 입력장치 및 이를 이용한 수술용 로봇 시스템의 제어방법 | |
| JP7128326B2 (ja) | 手術システム | |
| JP6665263B2 (ja) | 遠隔操作装置、手術システムおよび操作対象ペダルの特定方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200205 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200205 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20201209 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201215 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210203 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210316 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210414 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210511 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210610 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6898285 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |