以下、実施形態を図面に基づいて説明する。
(手術システムの構成)
図1~図21を参照して、一実施形態による手術システム400の構成について説明する。
図1に示すように、手術システム400は、遠隔操作装置100と、患者側装置200とを備えている。遠隔操作装置100は、患者側装置200に設けられた医療器具(medical equipment)を遠隔操作するために設けられている。患者側装置200によって実行されるべき動作態様指令が術者(surgeon)である操作者Oにより遠隔操作装置100に入力されると、遠隔操作装置100は、動作態様指令をコントローラ206を介して患者側装置200に送信する。そして、患者側装置200は、遠隔操作装置100から送信された動作態様指令に応答して、マニピュレータ201に取り付けられた手術器具(surgical instrument)201a~201c、内視鏡201d等の医療器具を操作する。これにより、低侵襲手術が行われる。
患者側装置200は、患者Pに対して手術を行うインターフェースを構成する。患者側装置200は、患者Pが横たわる手術台300の傍らに配置される。患者側装置200は、複数のマニピュレータ201を有し、このうち1つのマニピュレータ201が内視鏡201dを支持し、その他のマニピュレータ201が手術器具201a~201cを把持する。各マニピュレータ201は、プラットホーム203に共通に支持されている。複数のマニピュレータ201は複数の関節を有し、それぞれの関節には、サーボモータを含む駆動部と、エンコーダ等の位置検出器とが設けられている。マニピュレータ201は、コントローラ206を介して与えられた駆動信号によりマニピュレータ201に取り付けられた医療器具が所望の動作を行うように制御されるように構成されている。
プラットホーム203は、手術室の床の上に載置されたポジショナ202に支持されている。ポジショナ202は、鉛直方向に調整可能な昇降軸を有する柱部204が、車輪を備え床面を移動可能なベース205に連結されている。
4つのマニピュレータ201のうち3つのマニピュレータ201の各々には、先端部に医療器具としての手術器具201a~201cが着脱可能に取り付けられる。手術器具201a~201cは、それぞれ、マニピュレータ201に取り付けられるハウジングと、細長形状のシャフトと、シャフトの先端部に設けられたエンドエフェクタとを備えている。エンドエフェクタとして、例えば、把持鉗子、シザーズ、フック、高周波ナイフ、スネアワイヤ、クランプ、ステイプラーが挙げられるがこれに限られるものではなく、各種の処置具を適用することができる。患者側装置200を用いた手術において、マニピュレータ201は、患者Pの体表に留置したカニューラ(トロカー)を介して患者Pの体内に手術器具201a~201cを導入する。そして、手術器具201a~201cのエンドエフェクタが手術部位の近傍に配置される。なお、手術器具201a、手術器具201bおよび手術器具201cは、それぞれ、特許請求の範囲の「第1手術器具」、「第2手術器具」および「交換用手術器具」の一例である。
4つのマニピュレータ201のうち1つのマニピュレータ201には、先端部に医療器具としての内視鏡201dが着脱可能に取り付けられる。内視鏡201dは、患者Pの体腔内を撮影するものであり、撮影した画像は、遠隔操作装置100に対して出力される。内視鏡201dとして、3次元画像を撮影することができる3D内視鏡若しくは2D内視鏡が用いられる。患者側装置200を用いた手術において、マニピュレータ201は、患者Pに体表に留置したトロカーを介して患者Pの体内に内視鏡201dを導入する。そして、内視鏡201dが手術部位の近傍に配置される。
遠隔操作装置100は、操作者Oとのインターフェースを構成する。遠隔操作装置100は、マニピュレータ201が把持する医療器具を操作者Oが操作するための装置である。すなわち、遠隔操作装置100は、操作者Oによって入力された手術器具201a~201cおよび内視鏡201dによって実行されるべき動作態様指令をコントローラ206を介して患者側装置200へ送信可能に構成されている。遠隔操作装置100は、たとえば、マスタの操作をしながらも患者Pの様子がよく見えるように手術台300の傍らに設置される。なお、遠隔操作装置100は、例えば動作態様指令を無線で送信するようにし、手術台300が設置された手術室とは別室に設置することも可能である。
手術器具201a~201cによって実行されるべき動作態様とは、手術器具201a~201cの動作(一連の位置および姿勢)および手術器具201a~201c個別の機能によって実現される動作の態様である。たとえば、手術器具201a~201cが把持鉗子である場合には、手術器具201a~201cによって実行されるべき動作態様とは、エンドエフェクタの手首のロール回転位置及びピッチ回転位置と、ジョーの開閉を行う動作である。また、手術器具201a~201cが高周波ナイフである場合には、手術器具201a~201cによって実行されるべき動作態様とは、高周波ナイフの振動動作、具体的には高周波ナイフに対する電流の供給であり得る。また、手術器具201a~201cがスネアワイヤである場合には、手術器具201a~201cによって実行されるべき動作態様とは、束縛動作および束縛状態の解放動作であり得る。また、バイポーラやモノポーラに電流を供給することによって手術対象部位を焼き切る動作であり得る。
内視鏡201dによって実行されるべき動作態様とは、たとえば、内視鏡201d先端の位置および姿勢の設定、ズーム倍率の設定である。
遠隔操作装置100は、図1および図2に示すように、操作ハンドル1と、操作ペダル部2と、表示装置3と、表示装置3を支持する表示部支持アーム4と、操作者Oの腕を支えるアームレスト5と、制御装置6と、を備えている。
操作ハンドル1は、マニピュレータ201が把持する医療器具を遠隔で操作するために設けられている。具体的には、操作ハンドル1は、医療器具(手術器具201a~201c、内視鏡201d)を操作するための操作者Oによる操作を受け付ける。操作ハンドル1は、X方向に沿って一対設けられている。操作ハンドル1は、右側(X2方向側)に配置され、操作者Oの右手により操作される操作ハンドル1aと、左側(X1方向側)に配置され、操作者Oの左手により操作される操作ハンドル1bと、を含んでいる。なお、操作ハンドル1aおよび操作ハンドル1bは、それぞれ、特許請求の範囲の「第1操作ハンドル」および「第2操作ハンドル」の一例である。
また、操作ハンドル1は、遠隔操作装置100の後方(Y2方向)側から、前方(Y1方向)側に向かって延びるように配置されている。操作ハンドル1は、所定の3次元の操作領域内で動かすことができるように構成されている。すなわち、操作ハンドル1は、上下方向(Z方向)、左右方向(X方向)、および前後方向(Y方向)に動かすことができるように構成されている。
右手用の操作ハンドル1aは、対応付られた手術器具201aを遠隔で操作するために設けられている。左手用の操作ハンドル1bは、対応付られた手術器具201bを遠隔で操作するために設けられている。操作ハンドル1aおよび1bには、図2に示すように、それぞれ、クラッチスイッチ11が設けられている。クラッチスイッチ11は、マニピュレータ201と、操作ハンドル1aおよび1bとの操作接続を一時切断する場合に操作される。操作ハンドル1aのクラッチスイッチ11が操作されると、操作ハンドル1aと、手術器具201aが設けられたマニピュレータ201との操作接続が一時切断される。また、操作ハンドル1bのクラッチスイッチ11が操作されると、操作ハンドル1bと、手術器具201bが設けられたマニピュレータ201との操作接続が一時切断される。
遠隔操作装置100と患者側装置200とは、複数のマニピュレータ201の動作の制御においては、マスタスレーブ型のシステムを構成する。すなわち、操作ハンドル1は、マスタスレーブ型のシステムにおけるマスタ側の操作部を構成し、医療器具を支持するマニピュレータ201はスレーブ側の動作部を構成する。そして、操作ハンドル1を操作者Oが操作すると、操作ハンドル1の動きをマニピュレータ201の先端部(手術器具201a~201cのエンドエフェクタまたは内視鏡201d)がトレースして移動するようにマニピュレータ201の動作が制御される。
また、患者側装置200は、設定された動作倍率に応じてマニピュレータ201の動作を制御するよう構成されている。たとえば、動作倍率が1/2倍に設定されている場合、手術器具201a~201cのエンドエフェクタは、操作ハンドル1の移動距離の1/2の移動距離を移動するよう制御される。これによって、精細な手術を精確に行うことができる。
操作ペダル部2は、図3~図5に示すように、医療器具に関する機能を実行するための複数のフットペダル20を含んでいる。また、複数のフットペダル20は、基台部2aに配置されている。フットペダル20は、凝固ペダル21と、切断ペダル22と、クラッチペダル23と、カメラペダル24と、を含んでいる。また、操作ペダル部2には、切替ペダル25が設けられている。凝固ペダル21と、切断ペダル22と、クラッチペダル23と、カメラペダル24とは、下方向に押すことにより操作される。切替ペダル25は、水平方向に押すことにより操作される。フットペダル20は、操作者Oの足により操作される。
また、操作ペダル部2は、フットペダル20を操作する足の存在を検知するための複数のセンサ26を含んでいる。センサ26は、センサ26a、26b、26c、26d、26e、26f、26gを含んでいる。また、複数のセンサ26の各々は、発光部261と、受光部262とを備えている。センサ26は、発光部261からの光が足により遮断されて、受光部262による受光が中断することにより、足の存在を検知する。つまり、センサ26は、遮断型のセンサである。センサ26は、フットペダル20上に操作者Oの足が配置されたことを検出するために設けられている。つまり、センサ26は、フットペダル20の操作準備位置に操作者Oの足が配置されたことを検出する。
センサ26によって検知された検知情報は、制御部61に送信され、当該検知情報を受領した制御部61は、対応するフットペダル20を操作する足の存在の有無を判定する。
凝固ペダル21は、手術器具を用いて手術部位を凝固させる操作を行うことができる。具体的には、凝固ペダル21は、操作されることにより、対応する手術器具201a、201bまたは201cに凝固用の電圧が印加されて、手術部位の凝固が行われる。凝固ペダル21は、凝固ペダル21aと凝固ペダル21bとを含んでいる。凝固ペダル21aは、凝固ペダル21bよりも左側(X1方向側)に配置されている。凝固ペダル21aは、左手用の操作ハンドル1bにより操作される手術器具201bに関連付けて用いられる。また、凝固ペダル21bは、右手用の操作ハンドル1aにより操作される手術器具201aに関連付けて用いられる。凝固ペダル21aおよび21bは、第1の色を有している。たとえば、凝固ペダル21aおよび21bは、第1の色として青色を有している。
切断ペダル22は、手術器具を用いて手術部位を切断させる操作を行うことができる。具体的には、切断ペダル22は、操作されることにより、対応する手術器具201a、201bまたは201cに切断用の電圧が印加されて、手術部位の切断が行われる。切断ペダル22は、切断ペダル22aと切断ペダル22bとを含んでいる。切断ペダル22aは、切断ペダル22bよりも左側(X1方向側)に配置されている。切断ペダル22aは、左手用の操作ハンドル1bにより操作される手術器具201bに関連付けて用いられる。また、切断ペダル22bは、右手用の操作ハンドル1aにより操作される手術器具201aに関連付けて用いられる。切断ペダル22aおよび22bは、第1の色とは異なる第2の色を有している。たとえば、切断ペダル22aおよび22bは、第2の色として黄色を有している。
つまり、右側用フットペダル(凝固ペダル21bおよび切断ペダル22b)は、右手用の操作ハンドル1aにより操作される手術器具201aに関する機能を実行させる。左側用フットペダル(凝固ペダル21aおよび切断ペダル22a)は、左手用の操作ハンドル1bにより操作される手術器具201bに関する機能を実行させる。なお、凝固ペダル21bは、特許請求の範囲の「第1ペダル」および「第1凝固ペダル」の一例であり、切断ペダル22bは、特許請求の範囲の「第1ペダル」および「第1切断ペダル」の一例である。また、凝固ペダル21aは、特許請求の範囲の「第2ペダル」および「第2凝固ペダル」の一例であり、切断ペダル22aは、特許請求の範囲の「第2ペダル」および「第2切断ペダル」の一例である。
クラッチペダル23は、クラッチ機能を実行させるために操作される。具体的には、クラッチペダル23は、マニピュレータ201と、操作ハンドル1aおよび1bとの操作接続を一時切断して手術器具の動作を停止させる場合に用いられる。クラッチペダル23が操作されている間は、操作ハンドル1aおよび1bを操作しても、患者側装置200のマニピュレータ201が動作しない。たとえば、操作により操作ハンドル1が移動可能な範囲の端部近傍に来た場合に、クラッチペダル23が操作されることにより、操作接続を一時切断して、操作ハンドル1を中央位置付近に戻すことができる。そして、クラッチペダル23の操作を中止するとマニピュレータ201と操作ハンドル1とが再び接続され、中央付近で操作ハンドル1の操作を再開することができる。ここで、クラッチペダル23は、両方の操作ハンドル1aおよび1bとマニピュレータ201との操作接続を一括して一時切断するために操作される。一方、操作ハンドル1aおよび1bに設けられたクラッチスイッチ11は、各操作ハンドル1aまたは1bと対応するマニピュレータ201との操作接続を個別に一時切断するために操作される。
カメラペダル24は、体腔内を撮像する内視鏡201dの位置および姿勢を操作するために用いられる。つまり、カメラペダル24は、内視鏡201dに関する機能を実行させる。具体的には、カメラペダル24は、内視鏡201dの操作ハンドル1による操作を有効にする。つまり、カメラペダル24が押されている間は、操作ハンドル1により内視鏡201dの位置および姿勢を操作することが可能である。たとえば、内視鏡201dは、左右の操作ハンドル1の両方を用いることにより操作される。具体的には、左右の操作ハンドル1の中間点を中心に左右の操作ハンドル1を回動させることにより、内視鏡201dが回動される。また、左右の操作ハンドル1を共に押し込むことにより、内視鏡201dが奥に進む。また、左右の操作ハンドル1を共に引っ張ることにより、内視鏡201dが手前に戻る。また、左右の操作ハンドル1を共に上下左右に移動させることにより、内視鏡201dが上下左右に移動する。
切替ペダル25は、操作ハンドル1により操作されるマニピュレータ201を切り替えるために用いられる。たとえば、マニピュレータ201は、4つ設けられており、手術器具201a~201cを保持する3つのマニピュレータ201を、切替ペダル25の操作により、左右の操作ハンドル1により操作されるマニピュレータ201が切り替えられる。つまり、切替ペダル25は、右手用の操作ハンドル1aにより操作されている手術器具201aまたは左手用の操作ハンドル1bにより操作されている手術器具201bを交換用の手術器具201cに変更するために操作される。切替ペダル25は、左方向(X1方向)に押されることにより操作される。たとえば、切替ペダル25を操作することにより、右手用の操作ハンドル1aにより操作されるマニピュレータ201が切り替えられる。この場合、左手用の操作ハンドル1bにより操作されるマニピュレータ201は変更せず、右手用の操作ハンドル1aにより操作されるマニピュレータ201が切り替えられる。また、たとえば、切替ペダル25を操作することにより、左手用の操作ハンドル1bにより操作されるマニピュレータ201が切り替えられる。この場合、右手用の操作ハンドル1aにより操作されるマニピュレータ201は変更せず、左手用の操作ハンドル1bにより操作されるマニピュレータ201が切り替えられる。
図3~図5に示すように、フットペダル20は、左側(X1側)から右側(X2側)に向かって、切替ペダル25、クラッチペダル23、カメラペダル24、切断ペダル22a、凝固ペダル21a、切断ペダル22b、凝固ペダル21aの順に配置されている。
図3~図5に示したフットペダル20の配置は、左右の操作ハンドル1それぞれに割り当てられた凝固ペダル21と切断ペダル22の組を右足だけで操作するのに適しているが、凝固ペダル21aと切断ペダル22aの組はクラッチペダル23およびカメラペダル24よりも左側(X1側)に配置し、クラッチペダル23およびカメラペダル24を中央(凝固ペダル21aと切断ペダル22aの組および凝固ペダル21bと切断ペダル22bの組との間)に配置するようにすれば、左手用の操作ハンドル1bに割り当てられた凝固ペダル21aと切断ペダル22aは左足で操作し、右手用の操作ハンドル1aに割り当てられた凝固ペダル21bと切断ペダル22bは右足で操作するのに適した配置となる。
複数のフットペダル20が配置された基台部2aは、水平方向に移動可能である。具体的には、基台部2aは幅方向(X方向)の両側でスライド軸受により遠隔操作装置100の基台に連結されており、操作ペダル部2が奥行方向(前後方向、Y方向)にスライドして移動可能である。そして、操作ペダル部2の奥行方向の移動は、遠隔操作装置100の基台内に設けられたモーター等の駆動装置により電動で行うことができる。これにより、操作者Oの操作姿勢、体格、または好みに合わせてフットペダル20の位置を調整することができる。
足の存在を検知するセンサ26の数は、下方操作されるフットペダル20の数よりも多い。具体的には、センサ26は、7つ設けられている。また、下方向に押すことにより操作されるフットペダル20(凝固ペダル21a、21b、切断ペダル22a、22b、クラッチペダル23およびカメラペダル24)は、6つ設けられている。
複数のフットペダル20のうちのある1つのフットペダル20の近傍に、操作する足を検知するために用いるセンサ26が複数設けられ、これらの複数のセンサ26を用いて当該ある1つのフットペダル20を操作している又はしようとする足が存在するか否かを判定する。具体的には、制御部61は、複数のフットペダル20のうちある1つのフットペダル20の近傍に配置された複数のセンサ26より検知情報を受領した場合に、ある1つのフットペダル20の操作準備位置に操作者Oの足が配置されたと判定する。
なお、説明を簡潔にするために、本明細書においては、あるフットペダル20の先端側(Y1側)中央部とこれに隣接するフットペダル20の先端側(Y1側)中央部との間にセンサ26(発光-受光型センサの場合は発光部から照射される直線光)が配置されるという構成を、単に「あるペダルとこれに隣接するペダルの間にセンサが配置される」と表現する。そして、本明細書において、あるフットペダル20の先端側(Y1側)中央部に配置されるセンサ26(発光-受光型センサの場合は発光部から照射される直線光が当該中央部を通るセンサ)、および、あるペダルとこれに隣接するペダルとの間に存在するセンサを「あるペダルの近傍に配置されるセンサ」と定義する。
センサ26aおよび26bにより、凝固ペダル21bに近づく足の存在を検知する。つまり、センサ26aおよび26bの両方により足を検知した場合、制御部61により、操作対象のフットペダル20は凝固ペダル21bであると判定される。また、センサ26bおよび26cにより、切断ペダル22bに近づく足の存在を検知する。つまり、センサ26bおよび26cの両方により足を検知した場合、制御部61により、操作対象のフットペダル20は切断ペダル22bであると判定される。
また、センサ26cおよび26dにより、凝固ペダル21aに近づく足の存在を検知する。つまり、センサ26cおよび26dの両方により足を検知した場合、制御部61により、操作対象のフットペダル20は凝固ペダル21aであると判定される。また、センサ26cおよび26dにより、切断ペダル22aに近づく足の存在を検知する。つまり、センサ26cおよび26dの両方により足を検知した場合、制御部61により、操作対象のフットペダル20は切断ペダル22aであると判定される。
また、センサ26fにより、カメラペダル24に近づく足の存在を検知する。つまり、センサ26fにより足を検知した場合、制御部61により、操作対象のフットペダル20はカメラペダル24であると判定される。また、センサ26gにより、クラッチペダル23に近づく足の存在を検知する。つまり、センサ26gにより足を検知した場合、制御部61により、操作対象のフットペダル20はクラッチペダル23であると判定される。
発光部261は、LEDなどの発光素子を含んでいる。発光部261は、可視光または赤外線などの非可視光を照射するように構成されている。受光部262は、受光素子を含んでいる。対応する発光部261と受光部262とは、平面視において、Y方向に沿って配置されている。つまり、図3~図5の破線で示すように、発光部261からの光は、平面視において、主にY方向に沿って照射される。また、対応する発光部261および受光部262の配列方向は、平面視において、各々平行になるように配置されている。また、発光部261は、斜め下方向に向けて光を照射するように構成されている。
図6を用いて、操作ペダル部2の凝固ペダル21(21aおよび21b)と、切断ペダル22(22aおよび22b)との割り当ての例について説明する。凝固ペダル21aと切断ペダル22aとは、1組で用いられ、凝固ペダル21bと切断ペダル22bとは、1組で用いられる。ここで、1つの鉗子(たとえば、グラスパ)により、手術部位を切断することも凝固させることも可能である。1つの鉗子で切断及び凝固を行う場合、切断には高い電圧が印加され、凝固には切断の場合よりも低い電圧がかけられる。つまり、凝固ペダル21a(21b)と切断ペダル22a(22b)とを選択して使用することにより、手術部位の凝固および切断を行うことができる。また、グラスパなどで切断・凝固を行うことができるとしても、凝固用のシーリングデバイスを専用または併用で使用することがある。シーリングデバイスでは凝固が完了すると自動で電力提供が終了するなどの追加機能を有していることが多いためである。
図6に示す例では、4つのマニピュレータ201に対して、医療器具として、バイポーラの鉗子F1と、モノポーラの鉗子F2と、シーリングデバイスF3と、内視鏡201dが取付けられる。4つのマニピュレータ201の位置関係は、各マニピュレータに設けられた位置検出器により認識される。各マニピュレータの左右の位置関係は、プラットホーム203から見た位置で認識する。図6(A)では、内視鏡201dが取り付けられたマニピュレータ201から見て、左側にモノポーラの鉗子F2、内視鏡201dが取り付けられたマニピュレータ201から見て、左側から右側に向けて順に、バイポーラの鉗子F1、シーリングデバイスF3が配置されている。凝固ペダル21(21aおよび21b)と、切断ペダル22(22aおよび22b)との割り当てとして、まず、手術器具201bが取り付けられているマニピュレータ201が左側用フットペダル(凝固ペダル21aおよび切断ペダル22a)に割り当てられ、ひとつ右にある手術器具201aが取り付けられているマニピュレータ201が右側用フットペダル(凝固ペダル21bおよび切断ペダル22b)に割り当てられる。つまり、図6(A)では、左側用フットペダル(凝固ペダル21aおよび切断ペダル22a)に、モノポーラの鉗子F2が割り当てられる。また、右側用フットペダル(凝固ペダル21bおよび切断ペダル22b)に、バイポーラの鉗子F1が割り当てられる。なお、手術器具が2つだけ取り付けられている場合は、内視鏡201dが取り付けられたマニピュレータ201から見て、一番左側のマニピュレータ201から順に、それぞれ、左側用フットペダルおよび右側用フットペダルに割り当てられる。手術器具が1つだけ取り付けられている場合は、左側用フットペダルに割り当てられる。
図6(B)では、助手(たとえば、看護師)により、バイポーラの鉗子F1と、モノポーラの鉗子F2とが入れ替えられる。この場合、手術器具201aおよび201bのマニピュレータ201への取り付けにより手術器具201aおよび201bの種類が特定される。たとえば、インターフェースのICに器具の型番などの情報が記憶されていてもよい。そして、左側用フットペダル(凝固ペダル21aおよび切断ペダル22a)に、バイポーラの鉗子F1が割り当てられる。また、右側用フットペダル(凝固ペダル21bおよび切断ペダル22b)に、モノポーラの鉗子F2が割り当てられる。
図6(C)では、助手(たとえば、看護師)により、モノポーラの鉗子F2と、シーリングデバイスF3とが入れ替えられる。手術器具201aおよび201bのマニピュレータ201への取り付けにより手術器具201aおよび201bの種類が特定される。そして、左側用フットペダル(凝固ペダル21aおよび切断ペダル22a)に、引き続き、バイポーラの鉗子F1が割り当てられる。また、右側用フットペダル(凝固ペダル21bおよび切断ペダル22b)に、シーリングデバイスF3が割り当てられる。
図6(D)では、切替ペダル25により、右側にある2本のマニピュレータ201のうちアクティベートするマニピュレータ201が切り替えられる。つまり、操作ハンドル1により操作されるマニピュレータ201が切り替えられる。これにより、左手用の操作ハンドル1bにより、バイポーラの鉗子F1が取り付けられたマニピュレータ201が操作され、右手用の操作ハンドル1aにより、モノポーラの鉗子F2が取り付けられたマニピュレータ201が操作される。左側用フットペダル(凝固ペダル21aおよび切断ペダル22a)に、引き続き、バイポーラの鉗子F1が割り当てられる。また、右側用フットペダル(凝固ペダル21bおよび切断ペダル22b)に、モノポーラの鉗子F2が割り当てられる。
図6(E)では、切替ペダル25により、右側にある2本のマニピュレータ201のうちアクティベートするマニピュレータ201が切り替えられる。つまり、操作ハンドル1により操作されるマニピュレータ201が切り替えられる。これにより、左手用の操作ハンドル1bにより、バイポーラの鉗子F1が取り付けられたマニピュレータ201が操作され、右手用の操作ハンドル1aにより、シーリングデバイスF3が取り付けられたマニピュレータ201が操作される。左側用フットペダル(凝固ペダル21aおよび切断ペダル22a)に、引き続き、バイポーラの鉗子F1が割り当てられる。また、右側用フットペダル(凝固ペダル21bおよび切断ペダル22b)に、シーリングデバイスF3が割り当てられる。
なお、主に強い把持力が必要なときに使用される、電気をかけない単純なグラスパを使用することもあるが、電気がかけられない手術器具に対しては、凝固ペダル21(21aおよび21b)と、切断ペダル22(22aおよび22b)とによる操作は行われないので、凝固ペダル21および切断ペダル22は割り当てられない。すなわち、凝固ペダル21(21aおよび21b)と、切断ペダル22(22aおよび22b)の割当ての際には、電気がかけられない手術器具を把持するマニピュレータ201は除外するように設定しておけばよい。
また、左側用フットペダル(凝固ペダル21aおよび切断ペダル22a)と、右側用フットペダル(凝固ペダル21bおよび切断ペダル22b)とは、他の方法(ルール)により割り当ててもよい。たとえば、内視鏡201dが取り付けられたマニピュレータ201の左右のマニピュレータ201それぞれに必ずフットペダルが割り当てるようにしてもよい。たとえば、内視鏡201dが取り付けられたマニピュレータ201より左側にある1つのマニピュレータ201を左側用フットペダル(凝固ペダル21aおよび切断ペダル22a)に割り当て、内視鏡201dが取り付けられたマニピュレータ201より右側にある2つのマニピュレータ201のうち左側にあるマニピュレータ201を右側用フットペダル(凝固ペダル21bおよび切断ペダル22b)に割り当てるようにしてもよい。
図1に示すように、表示装置3は、内視鏡201dによって撮像された画像を表示することができるものである。表示装置3は、スコープ型表示装置または非スコープ型表示装置からなる。図1に示す例では、表示装置3は、スコープ型表示装置である。スコープ型表示装置とは、たとえば、覗き込むタイプの表示部である。また、非スコープ型表示装置とは、通常のパーソナルコンピュータのディスプレイのような覗き込むタイプではない平坦な画面を有する開放型の表示部を含む概念である。
図2に示すように、制御装置6は、例えば、CPU等の演算器を有する制御部61と、ROMおよびRAM等のメモリを有する記憶部62と、画像制御部63とを含んでいる。制御装置6は、少なくとも内視鏡201dおよび表示装置3を制御するように構成されている。制御装置6は、集中制御する単独の制御装置により構成されていてもよく、互いに協働して分散制御する複数の制御装置により構成されてもよい。制御部61は、操作ハンドル1により入力された動作態様指令を、操作ペダル部2の切替状態に応じて、手術器具201a~201cによって実行されるべき動作態様指令であるか、または、内視鏡201dによって実行されるべき動作態様指令であるかを判定する。制御部61は、判定結果と操作ハンドル1による操作とに基づいて、対応するマニピュレータ201を動作させる信号を送信する。
また、制御部61は、センサ26より操作者Oの足の存在の検知情報を受領して操作者Oの足の存在の有無を判定する。また、制御部61は、操作者Oの足が存在すると判定した場合に、対応する表示を表示装置3に表示させるように制御する。
記憶部62には例えば手術器具201a~201cの種類に応じた制御プログラムが記憶されていて、取り付けられた手術器具201a~201cの種類に応じて制御部61がこれらの制御プログラムを読み出すことにより、遠隔操作装置100の操作ハンドル1及び/又は操作ペダル部2の動作指令が個別の手術器具201a~201cに適合した動作をさせることができる。
画像制御部63は、内視鏡201dが取得した画像を表示装置3に伝送する。画像制御部63は、必要に応じて画像の加工修正処理を行う。
ここで、本実施形態では、図7に示すように、制御装置6は、右手用の操作ハンドル1aによって操作される手術器具201aに関する情報を示す第1エリア321と、左手用の操作ハンドル1bによって操作される手術器具201bに関する情報を示す第2エリア322と、内視鏡201dに関する情報を示す第3エリア323と、を右から左に順に並べて配置したグラフィカルユーザインタフェース32を内視鏡201dによって撮像された画像31上に重ねて表示装置3に表示するように構成されている。これにより、複数のマニピュレータ201に各々支持された手術器具201a、手術器具201bおよび内視鏡201dの情報がそれぞれ表示される第1エリア321、第2エリア322および第3エリア323を同じ高さ位置に並べて表示することができるので、複数のマニピュレータ201に各々支持された手術器具201a、手術器具201bおよび内視鏡201dの情報を確認する際に、視線を大きく動かす必要がない。その結果、複数のマニピュレータ201に各々支持された手術器具201a、201bおよび内視鏡201dの情報の視認性が低下するのを抑制することができる。
また、本実施形態では、制御装置6は、右手用の操作ハンドル1aによって操作される手術器具201aに関する情報を示す第1エリア321と、左手用の操作ハンドル1bによって操作される手術器具201bに関する情報を示す第2エリア322と、内視鏡201dに関する情報を示す第3エリア323とを、操作ペダル部2の右側用フットペダル(凝固ペダル21bおよび切断ペダル22b)、左側用フットペダル(凝固ペダル21aおよび切断ペダル22a)およびカメラペダル24の並び順と同じ順に並べて配置したグラフィカルユーザインタフェース32を内視鏡201dによって撮像された画像31上に重ねて表示装置3に表示するように構成されている。これにより、手術器具201aに関する情報、手術器具201bに関する情報、および、内視鏡201dに関する情報の表示の並び順と、対応するフットペダル20の並び順とを一致させることができるので、手術器具201a、手術器具201bおよび内視鏡201dに関する情報が表示される位置に基づいて、各フットペダル20の位置を操作者Oが直感的に把握することができる。
表示装置3に表示されるグラフィカルユーザインタフェース32は、図7に示すように、第1エリア321と、第2エリア322と、第3エリア323と、第4エリア324と、第5エリア325とを含む。また、グラフィカルユーザインタフェース32は、ステータスエリア326を含む。また、グラフィカルユーザインタフェース32は、ポップアップエリア327a(図9参照)と、ポップアップエリア327b(図13参照)と、ポップアップエリア327c(図15参照)と、ポップアップエリア327d(図17参照)とを含む。また、グラフィカルユーザインタフェース32は、内視鏡201dの水準器328(図14参照)が表示されるセンターエリアを含む。また、グラフィカルユーザインタフェース32は、エラー通知エリア329a(図20参照)と、エラー通知エリア329b(図21参照)とを含む。
グラフィカルユーザインタフェース32の第1エリア321と、第2エリア322と、第3エリア323と、第4エリア324と、第5エリア325とは、表示装置3の下方の端部近傍領域に並んで配置される。なお、第1エリア321と、第2エリア322と、第3エリア323と、第4エリア324と、第5エリア325とが、表示装置3の上方の端部近傍領域に並んで配置されていてもよい。これにより、表示装置3の上方または下方に、手術器具201a、手術器具201bおよび内視鏡201dに関する情報が表示されるので、表示装置3の中央に表示する場合と異なり、第1エリア321、第2エリア322、第3エリア323、第4エリア324および第5エリア325によって、内視鏡201dにより撮像した画像31が見えにくくなるのを抑制することができる。
グラフィカルユーザインタフェース32のポップアップエリア327aおよび327bは、表示装置3の左右方向における左側で、上下方向における中央付近に配置される。グラフィカルユーザインタフェース32のポップアップエリア327cおよび327dは、表示装置3の左右方向における右側で、上下方向における中央付近に配置される。グラフィカルユーザインタフェース32のステータスエリア326と、エラー通知エリア329aは、表示装置3の上方の端部近傍領域に配置される。エラー通知エリア329bは、グラフィカルユーザインタフェース32の第2エリア322の上方に配置される。
第1エリア321には、右手用の操作ハンドル1aにより操作されている手術器具201aの種類が表示される。第2エリア322には、左手用の操作ハンドル1bにより操作されている手術器具201bの種類が表示される。第3エリア323には、内視鏡201dを示す情報が表示される。これにより、操作ハンドル1aにより操作されている手術器具201a、および、操作ハンドル1bにより操作されている手術器具201bの種類を操作者Oが容易に把握することができる。また、内視鏡201dを示す情報に基づいて内視鏡201dの状態を操作者Oが容易に把握することができる。
第4エリア324は、第1エリア321と第2エリア322との間に配置されている。第4エリア324には、交換用の手術器具201cに関する情報が表示される。具体的には、第4エリア324には、交換用の手術器具201cの種類が表示される。これにより、手術器具201aまたは手術器具201bと交換して操作ハンドル1aまたは操作ハンドル1bにより操作される交換用の手術器具201cの情報を操作者Oが容易に把握することができる。また、第4エリア324は、第1エリア321および第2エリア322よりも薄目の色合いで情報が表示される。つまり、第4エリア324の情報は、第1エリア321および第2エリア322の情報よりも目立たないように表示される。
第5エリア325は、第2エリア322よりも左側に配置されている。第5エリア325には、クラッチ機能に関する情報が表示される。具体的には、第5エリア325には、クラッチペダル23の操作状態が表示される。これにより、マニピュレータ201と、操作ハンドル1との操作接続を一時切断して手術器具201aおよび201bの動作を停止させる場合に用いられるクラッチペダル23の状態を第5エリア325に表示させることができる。
ステータスエリア326には、手術システム400のステータスが表示される。たとえば、ステータスエリア326には、手術時間が表示される。また、ステータスエリア326には、表示装置3の輝度調整情報やコントラスト調整情報が表示される。
ポップアップエリア327a~327dは、第1エリア321、第2エリア322および第3エリア323とは異なる位置に配置される。また、ポップアップエリア327a~327dには、対応するフットペダル20の操作準備位置に操作者Oの足が配置されたことを、複数のセンサ26のうちの少なくとも1つのセンサ26により検出したことに基づいて、情報が表示される。
図9に示すように、ポップアップエリア327aには、クラッチペダル23の操作準備位置に操作者Oの足が配置された場合に、クラッチペダル23に関する情報が表示される。ポップアップエリア327aには、所定の時間(たとえば、3秒間)情報が表示される。つまり、ポップアップエリア327aの情報の表示は、クラッチペダル23の操作準備位置から操作者Oの足が移動するか、クラッチペダル23が操作されるか、または、所定の時間が経過すると消える。
図13に示すように、ポップアップエリア327bには、カメラペダル24の操作準備位置に操作者Oの足が配置された場合に、カメラペダル24に関する情報が表示される。ポップアップエリア327bには、所定の時間(たとえば、3秒間)情報が表示される。つまり、ポップアップエリア327bの情報の表示は、カメラペダル24の操作準備位置から操作者Oの足が移動するか、カメラペダル24が操作されるか、または、所定の時間が経過すると消える。
図15に示すように、ポップアップエリア327cには、切断ペダル22aまたは22bの操作準備位置に操作者Oの足が配置された場合に、切断ペダル22に関する情報が表示される。ポップアップエリア327cには、所定の時間(たとえば、3秒間)情報が表示される。つまり、ポップアップエリア327cの情報の表示は、切断ペダル22aまたは22bの操作準備位置から操作者Oの足が移動するか、切断ペダル22aまたは22bが操作されるか、または、所定の時間が経過すると消える。
図17に示すように、ポップアップエリア327dには、凝固ペダル21aまたは21bの操作準備位置に操作者Oの足が配置された場合に、凝固ペダル21に関する情報が表示される。ポップアップエリア327dには、所定の時間(たとえば、3秒間)情報が表示される。つまり、ポップアップエリア327dの情報の表示は、凝固ペダル21aまたは21bの操作準備位置から操作者Oの足が移動するか、凝固ペダル21aまたは21bが操作されるか、または、所定の時間が経過すると消える。
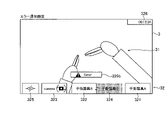
図14に示すように、内視鏡201dの水準器328は、カメラペダル24が操作された場合に、表示装置3に表示される。これにより、水準器328に基づいて操作することにより内視鏡201dの姿勢を容易に変更させることができる。
制御装置6は、右側用フットペダル(凝固ペダル21bおよび切断ペダル22b)、左側用フットペダル(凝固ペダル21aおよび切断ペダル22a)およびカメラペダル24のうちの少なくとも1つのフットペダル20の操作準備位置に操作者Oの足が配置されたことを、複数のセンサ26のうちの少なくとも1つのセンサ26により検出したことに基づいて、第1エリア321、第2エリア322および第3エリア323のうちの対応するエリアの表示形態を変更するように構成されている。
エリアの表示形態の変更は、表示色の変更、反転表示、エリアの枠線の表示変更、表示エリアの拡大/縮小のうち少なくとも1つを含む。
グラフィカルユーザインタフェース32の各エリアには、各フットペダル20の操作の状況が表示されるように構成されている。これにより、各フットペダル20の操作状況を操作者Oが容易に把握することができる。
具体的には、第1エリア321には、手術器具201aに関する情報に加えて右側用フットペダル(凝固ペダル21bおよび切断ペダル22b)に関する情報が表示される。たとえば、凝固ペダル21bまたは切断ペダル22bの操作準備位置に操作者Oの足が配置された場合に、対応するフットペダル20(凝固ペダル21bまたは切断ペダル22b)の色を用いて、第1エリア321の枠線を表示する。これにより、第1エリア321の表示により右側用フットペダル(凝固ペダル21bおよび切断ペダル22b)の操作による手術器具201aの機能の実行状態を操作者Oが容易に把握することができる。また、凝固ペダル21bまたは切断ペダル22bが操作された場合に、第1エリア321に凝固ペダル21bまたは切断ペダル22bに関する情報が操作準備位置に操作者Oの足が配置された場合と区別して表示される。たとえば、凝固ペダル21bまたは切断ペダル22bが操作された場合に、対応するフットペダル20(凝固ペダル21bまたは切断ペダル22b)の色を、第1エリア321の全体に表示する。これにより、第1エリア321の表示により凝固ペダル21bまたは切断ペダル22bの操作状態を操作者Oが容易に把握することができる。
つまり、凝固ペダル21bが操作された場合に、第1エリア321に凝固ペダル21bに関する情報が表示される。また、切断ペダル22bが操作された場合に、第1エリア321に切断ペダル22bに関する情報が表示される。これにより、第1エリア321の表示により右手用の操作ハンドル1aにより操作される手術器具201aによる凝固機能および切断機能の実行状態を操作者Oが容易に把握することができる。
また、第2エリア322には、手術器具201bに関する情報に加えて左側用フットペダル(凝固ペダル21aおよび切断ペダル22a)に関する情報が表示される。たとえば、凝固ペダル21aまたは切断ペダル22aの操作準備位置に操作者Oの足が配置された場合に、対応するフットペダル20(凝固ペダル21aまたは切断ペダル22a)の色を用いて、第2エリア322の枠線を表示する。これにより、第2エリア322の表示により左側用フットペダル(凝固ペダル21aおよび切断ペダル22a)の操作による手術器具201bの機能の実行状態を操作者Oが容易に把握することができる。また、凝固ペダル21aまたは切断ペダル22aが操作された場合に、第2エリア322に凝固ペダル21aまたは切断ペダル22aに関する情報が操作準備位置に操作者Oの足が配置された場合と区別して表示される。たとえば、凝固ペダル21aまたは切断ペダル22aが操作された場合に、対応するフットペダル20(凝固ペダル21aまたは切断ペダル22a)の色を、第2エリア322の全体に表示する。これにより、第2エリア322の表示により凝固ペダル21aまたは切断ペダル22aの操作状態を操作者Oが容易に把握することができる。
つまり、凝固ペダル21aが操作された場合に、第2エリア322に凝固ペダル21aに関する情報が表示される。また、切断ペダル22aが操作された場合に、第2エリア322に切断ペダル22aに関する情報が表示される。これにより、第2エリア322の表示により左手用の操作ハンドル1bにより操作される手術器具201bによる凝固機能および切断機能の実行状態を操作者Oが容易に把握することができる。
また、第3エリア323には、内視鏡201dに関する情報に加えてカメラペダル24に関する情報が表示される。たとえば、カメラペダル24の操作準備位置に操作者Oの足が配置された場合に、第3エリア323の枠線を強調表示する。これにより、第3エリア323の表示によりカメラペダル24の操作による内視鏡201dの機能の実行状態を操作者Oが容易に把握することができる。また、カメラペダル24が操作された場合に、第3エリア323にカメラペダル24に関する情報が操作準備位置に操作者Oの足が配置された場合と区別して表示される。たとえば、カメラペダル24が操作された場合に、第3エリア323の背景色と文字色とを反転表示させる。これにより、第3エリア323の表示によりカメラペダル24の操作状態を操作者Oが容易に把握することができる。
次に、図8~図21を参照して、フットペダル20に対する操作者Oの操作に基づいて表示されるグラフィカルユーザインタフェース32の例について説明する。
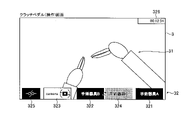
図8に示すように、切替ペダル25が操作されると、左手用の操作ハンドル1bにより操作される手術器具が手術器具201bから手術器具201cに切り替えられる。この場合、第2エリア322および第4エリア324の背景色と文字色とが反転表示される。これにより、操作者Oは、手術器具が切り替えられたことを容易に認識することが可能である。
図9に示すように、クラッチペダル23の操作準備位置に操作者Oの足が配置された場合に、第5エリア325の枠線が強調して表示される。また、ポップアップエリア327aにクラッチペダル23に関する情報がポップアップ表示される。なお、クラッチペダル23の操作準備位置に操作者Oの足が配置されていることが継続している場合でも、ポップアップエリア327aの表示は、所定時間経過後、消える。その場合、第5エリア325の枠線の強調表示は、継続される。
図10に示すように、クラッチペダル23が操作されると、操作ハンドル1と、マニピュレータ201との操作接続が一時切断される。この場合、クラッチペダル23の情報を表示する第5エリア325の背景色と文字色とが反転表示される。また、操作接続が一時切断された手術器具201aの情報を表示する第1エリア321の背景色と文字色とが反転表示される。また、操作接続が一時切断された手術器具201bの情報を表示する第2エリア322の背景色と文字色とが反転表示される。操作後、操作者Oの足が操作準備位置に戻ると、図9に示すように、第5エリア325の枠線が強調して表示される。
図11に示すように、右手用の操作ハンドル1aのクラッチスイッチ11が操作されると、操作ハンドル1aと、手術器具201aが設けられたマニピュレータ201との操作接続が一時切断される。この場合、操作接続が一時切断された手術器具201aの情報を表示する第1エリア321の背景色と文字色とが反転表示される。
図12に示すように、左手用の操作ハンドル1bのクラッチスイッチ11が操作されると、操作ハンドル1bと、手術器具201bが設けられたマニピュレータ201との操作接続が一時切断される。この場合、操作接続が一時切断された手術器具201bの情報を表示する第2エリア322の背景色と文字色とが反転表示される。
図13に示すように、カメラペダル24の操作準備位置に操作者Oの足が配置された場合に、第3エリア323の枠線が強調して表示される。また、ポップアップエリア327bにカメラペダル24に関する情報がポップアップ表示される。なお、カメラペダル24の操作準備位置に操作者Oの足が配置されていることが継続している場合でも、ポップアップエリア327bの表示は、所定時間経過後、消える。その場合、第3エリア323の枠線の強調表示は、継続される。
図14に示すように、カメラペダル24が操作されると、操作ハンドル1aおよび1bにより、内視鏡201dの位置および姿勢を操作することが可能になる。この場合、カメラペダル24の情報を表示する第3エリア323の背景色と文字色とが反転表示される。また、センターエリアに内視鏡201dの水準器328が表示される。
図15に示すように、右手により操作されている手術器具201aに対応する切断ペダル22bの操作準備位置に操作者Oの足が配置された場合に、第1エリア321の枠線が強調して表示される。具体的には、切断ペダル22bが有する第2の色により、枠線の左から半分以上が強調して表示される。残りの枠線は、凝固ペダル21bが有する第1の色により強調表示される。これにより、枠線を第2の色のみで強調して表示する場合と比べて、操作者Oが切断ペダル22bと凝固ペダル21bとのうち、切断ペダル22bの操作準備位置に足を配置していることを効果的に認識させることができる。また、ポップアップエリア327cに切断ペダル22bに関する情報がポップアップ表示される。なお、切断ペダル22bの操作準備位置に操作者Oの足が配置されていることが継続している場合でも、ポップアップエリア327cの表示は、所定時間経過後、消える。その場合、第1エリア321の枠線の強調表示は、継続される。
なお、左手により操作されている手術器具201bに対応する切断ペダル22aの操作準備位置に操作者Oの足が配置された場合も、同様にして、第2エリア322の枠線が強調して表示される。
図16に示すように、切断ペダル22bが操作されると、手術器具201aに所定の電圧が印加されて、手術部位を切断することが可能になる。この場合、切断ペダル22bの情報を表示する第1エリア321の背景が、切断ペダル22bが有する第2の色で表示される。
なお、切断ペダル22aが操作された場合も、同様にして、切断ペダル22aの情報を表示する第2エリア322の背景が、切断ペダル22aが有する第2の色で表示される。
図17に示すように、右手により操作されている手術器具201aに対応する凝固ペダル21bの操作準備位置に操作者Oの足が配置された場合に、第1エリア321の枠線が強調して表示される。具体的には、凝固ペダル21bが有する第1の色により、枠線の右から半分以上が強調して表示される。残りの枠線は、切断ペダル22bが有する第2の色により強調表示される。これにより、枠線を第1の色のみで強調して表示する場合と比べて、操作者Oが切断ペダル22bと凝固ペダル21bとのうち、凝固ペダル21bの操作準備位置に足を配置していることを効果的に認識させることができる。また、ポップアップエリア327dに凝固ペダル21bに関する情報がポップアップ表示される。なお、凝固ペダル21bの操作準備位置に操作者Oの足が配置されていることが継続している場合でも、ポップアップエリア327dの表示は、所定時間経過後、消える。その場合、第1エリア321の枠線の強調表示は、継続される。
なお、左手により操作されている手術器具201bに対応する凝固ペダル21aの操作準備位置に操作者Oの足が配置された場合も、同様にして、第2エリア322の枠線が強調して表示される。
図18に示すように、凝固ペダル21bが操作されると、手術器具201aに所定の電圧が印加されて、手術部位を凝固することが可能になる。この場合、凝固ペダル21bの情報を表示する第1エリア321の背景が、凝固ペダル21bが有する第1の色で表示される。
なお、凝固ペダル21aが操作された場合も、同様にして、凝固ペダル21aの情報を表示する第2エリア322の背景が、凝固ペダル21aが有する第1の色で表示される。
図19に示すように、左手により操作されている手術器具201bに対応する切断ペダル22aの操作準備位置に操作者Oの足が配置され、かつ、クラッチペダル23の操作準備位置に操作者Oの足が配置された場合に、第2エリア322の枠線が強調して表示される。具体的には、切断ペダル22aが有する第2の色により、枠線の左から半分以上が強調して表示される。残りの枠線は、凝固ペダル21aが有する第1の色により強調表示される。また、ポップアップエリア327cに切断ペダル22aに関する情報がポップアップ表示される。また、第5エリア325の枠線が強調して表示される。また、ポップアップエリア327aにクラッチペダル23に関する情報がポップアップ表示される。
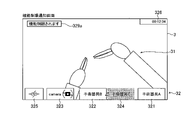
図20に示すように、機能が制限される場合、エラー通知エリア329aに機能が制限される通知が表示される。また、切断や凝固の機能が設定されていない手術器具を用いている場合に、切断ペダル22や凝固ペダル21が操作された場合に、手術器具に対応するエリアの上側に機能しない操作が行われたことがポップアップ表示される。この場合、切断ペダル22や凝固ペダル21を操作したとしても、手術器具に電圧は印加されない。
図21に示すように、エラーが通知される場合、エラー通知エリア329bにエラーが通知される。
(変形例)
なお、今回開示された実施形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した実施形態の説明ではなく特許請求の範囲によって示され、さらに特許請求の範囲と均等の意味および範囲内でのすべての変更(変形例)が含まれる。
たとえば、上記実施形態では、操作ペダル部のフットペダルが、凝固ペダルと、切断ペダルとを含む構成の例を示したが、本発明はこれに限られない。本発明では、操作ペダル部のフットペダルが、凝固ペダルおよび切断ペダル以外の医療器具に関する機能を実行するためのフットペダルを含んでいてもよい。
また、上記実施形態では、センサが遮断型のセンサの例を示したが、本発明はこれに限られない。本発明では、センサは、透過型であってもよいし、反射型であってもよい。また、光を用いずに、足の存在を検知してもよい。たとえば、音波を用いて検知してもよいし、コイルを用いて検知してもよい。また、センサは、非接触式に限らず、接触により足の存在を検知してもよい。たとえば、センサは、機械式のスイッチでもよい。