JP6855331B2 - 画像転送装置、画像診断装置、および画像診断システム - Google Patents
画像転送装置、画像診断装置、および画像診断システム Download PDFInfo
- Publication number
- JP6855331B2 JP6855331B2 JP2017114593A JP2017114593A JP6855331B2 JP 6855331 B2 JP6855331 B2 JP 6855331B2 JP 2017114593 A JP2017114593 A JP 2017114593A JP 2017114593 A JP2017114593 A JP 2017114593A JP 6855331 B2 JP6855331 B2 JP 6855331B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- vehicle
- diagnostic
- unit
- transfer device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000012546 transfer Methods 0.000 title claims description 205
- 238000002059 diagnostic imaging Methods 0.000 title claims description 81
- 240000004050 Pentaglottis sempervirens Species 0.000 claims description 75
- 235000004522 Pentaglottis sempervirens Nutrition 0.000 claims description 75
- 239000003550 marker Substances 0.000 claims description 73
- 230000005856 abnormality Effects 0.000 claims description 46
- 230000000052 comparative effect Effects 0.000 claims description 40
- 238000012545 processing Methods 0.000 claims description 23
- 238000003860 storage Methods 0.000 claims description 23
- 238000003384 imaging method Methods 0.000 claims description 21
- 230000004044 response Effects 0.000 claims description 15
- 238000009434 installation Methods 0.000 claims description 6
- 238000003745 diagnosis Methods 0.000 description 101
- 238000010586 diagram Methods 0.000 description 28
- 238000000605 extraction Methods 0.000 description 17
- 238000002360 preparation method Methods 0.000 description 17
- 230000002159 abnormal effect Effects 0.000 description 9
- 230000005540 biological transmission Effects 0.000 description 9
- 238000000034 method Methods 0.000 description 9
- 230000008569 process Effects 0.000 description 7
- 238000012806 monitoring device Methods 0.000 description 6
- 238000007689 inspection Methods 0.000 description 5
- 238000012986 modification Methods 0.000 description 4
- 230000004048 modification Effects 0.000 description 4
- 238000005520 cutting process Methods 0.000 description 3
- 239000000284 extract Substances 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 2
- 238000012790 confirmation Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 230000001151 other effect Effects 0.000 description 2
- 241001422033 Thestylus Species 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 238000013144 data compression Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005401 electroluminescence Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 239000013589 supplement Substances 0.000 description 1
Images















Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
- H04N7/181—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast for receiving images from a plurality of remote sources
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
- G06T7/0004—Industrial image inspection
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/57—Mechanical or electrical details of cameras or camera modules specially adapted for being embedded in other devices
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/80—Camera processing pipelines; Components thereof
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Quality & Reliability (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Image Analysis (AREA)
- Image Processing (AREA)
- Closed-Circuit Television Systems (AREA)
- Traffic Control Systems (AREA)
Description
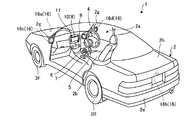
まず、図1および図2を用いて、第1実施形態による車両1の概略的な構成について説明する。図1は、第1実施形態による車両1の車室2aの一部が透視された状態を示した例示的な斜視図である。また、図2は、第1実施形態による車両1を示した例示的な平面図(鳥瞰図)である。
上述した第1実施形態では、俯瞰画像から複数の診断画像が抽出された場合、抽出された全ての診断画像の転送が実行される。しかしながら、診断画像に異常が存在するか否かを転送前に判定し、異常が存在すると判定された診断画像のみを実際に転送するようにすれば、転送量をさらに削減することが可能になるとともに、検査員による確認の手間も低減することが可能になるので、画像診断の効率性が向上し、有意義である。
上述した第2実施形態では、診断画像に異常が存在するか否かの判定を、画像の転送前に、画像を転送する側で実行する例について説明した。しかしながら、診断画像に異常が存在するか否かの判定は、診断画像の転送後に、診断画像を受信した側で実行することも可能である。
上述した第1実施形態、第2実施形態およびその変形例では、車両1を上方から見た俯瞰画像から診断画像を抽出する例について説明した。しかしながら、診断画像は、俯瞰画像から抽出される画像に限られるものではない。
13 外部インターフェース
16、16a〜16d 車載カメラ
23 車載ネットワーク
100、100a、100b 画像転送装置
102 俯瞰画像取得部(画像取得部)
102b マーカ画像取得部(画像取得部)
104、104a、104b 画像転送部
105a 比較画像記憶部(記憶部)
106b マーカ異常判定部(判定部)
200、200a 画像診断装置
201 入力受付部
202 指示出力部
203 画像受信部
204、204a 表示処理部
205a 比較画像記憶部(記憶部)
Claims (8)
- 車両の周辺を撮像する車載カメラの撮像結果に基づく所定の画像を取得する画像取得部と、
前記車載カメラの異常を画像に基づいて診断する画像診断装置が、車載ネットワーク上に設けられる前記車両の外部インターフェースに接続された場合に、前記画像診断装置からの指示に応じて、前記所定の画像から部分的に抽出された診断画像を、前記車載ネットワークを介して前記画像診断装置に転送する画像転送部と、
を備える、画像転送装置。 - 前記画像取得部は、前記車載カメラが複数設けられている場合に当該複数の車載カメラの撮像結果に基づいて生成される、前記車両の周辺を上方から見た俯瞰画像を、前記所定の画像として取得し、
前記画像転送部は、前記俯瞰画像のうち、前記複数の車載カメラによる複数の撮像領域の境界に対応した境界領域の画像を、前記診断画像として転送する、
請求項1に記載の画像転送装置。 - 前記複数の車載カメラに異常がない状態での前記境界領域を表す比較画像を記憶する記憶部をさらに備え、
前記画像転送部は、前記比較画像と一致しない前記診断画像を、前記車載ネットワークを介して前記画像診断装置に転送する、
請求項2に記載の画像転送装置。 - 前記画像取得部は、前記車載カメラが複数設けられている場合に当該複数の車載カメラにより撮像される、前記車両の周辺の所定の位置に設置されたマーカの撮像画像を、前記所定の画像として取得し、
前記撮像画像から前記マーカが正常に検出されるか否かを判定する判定部をさらに備え、
前記画像転送部は、前記判定部の判定結果に応じて、前記マーカが正常に検出されなかった前記撮像画像のうち、前記マーカの設置位置を含む所定の範囲に対応した所定の領域の画像を、前記診断画像として転送する、
請求項1に記載の画像転送装置。 - 前記画像転送部は、前記画像診断装置からの前記指示に応じて、前記診断画像を転送するか、または前記所定の画像の全体を転送するか、を切り替える、
請求項1〜4のいずれか1項に記載の画像転送装置。 - 車載ネットワーク上に設けられる車両の外部インターフェースに接続可能に構成され、前記車両の周辺を撮像する車載カメラの異常を画像に基づいて診断する画像診断装置であって、
操作入力を受け付ける入力受付部と、
前記画像診断装置が前記外部インターフェースに接続された状態で、前記車両の画像転送装置であって、前記車載カメラの撮像結果に基づく所定の画像を取得する画像取得部と、前記画像診断装置が前記外部インターフェースに接続された場合に、前記画像診断装置からの指示に応じて、前記所定の画像から部分的に抽出された診断画像を、前記車載ネットワークを介して前記画像診断装置に転送する画像転送部と、を備えた画像転送装置に、前記操作入力に対応した指示を出力する指示出力部と、
前記指示に応じて前記画像転送装置から転送された前記診断画像を受信する画像受信部と、
前記画像受信部により受信された前記診断画像を表示部に表示する表示処理部と、
を備える、画像診断装置。 - 前記所定の画像は、前記車載カメラが複数設けられている場合に当該複数の車載カメラの撮像結果に基づいて生成される、前記車両の周辺を上方から見た俯瞰画像であり、
前記診断画像は、前記俯瞰画像のうち、前記複数の車載カメラによる複数の撮像領域の境界に対応した境界領域の画像であり、
前記複数の車載カメラに異常がない状態での前記境界領域を表す比較画像を記憶する記憶部をさらに備え、
前記表示処理部は、前記画像受信部が受信した前記診断画像のうち、前記比較画像と一致しない前記診断画像を前記表示部に表示する、
請求項6に記載の画像診断装置。 - 車両に設けられる画像転送装置と、
車載ネットワーク上に設けられる前記車両の外部インターフェースに接続可能に構成され、前記車両の周辺を撮像する車載カメラの異常を画像に基づいて診断する画像診断装置と、
を備え、
前記画像転送装置は、
前記車載カメラの撮像結果に基づく所定の画像を取得する画像取得部と、
前記画像診断装置が前記外部インターフェースに接続された場合に、前記画像診断装置からの指示に応じて、前記所定の画像から部分的に抽出された診断画像を、前記車載ネットワークを介して前記画像診断装置に転送する画像転送部と、
を含み、
前記画像診断装置は、
操作入力を受け付ける入力受付部と、
前記画像診断装置が前記外部インターフェースに接続された状態で、前記操作入力に対応した前記指示を、前記画像転送装置に出力する指示出力部と、
前記指示に応じて前記画像転送装置から転送された前記診断画像を表示部に表示する表示処理部と、
を含む、画像診断システム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017114593A JP6855331B2 (ja) | 2017-06-09 | 2017-06-09 | 画像転送装置、画像診断装置、および画像診断システム |
| CN201810569394.0A CN109068091A (zh) | 2017-06-09 | 2018-06-05 | 图像传送装置、图像诊断装置以及图像诊断系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017114593A JP6855331B2 (ja) | 2017-06-09 | 2017-06-09 | 画像転送装置、画像診断装置、および画像診断システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018207458A JP2018207458A (ja) | 2018-12-27 |
| JP6855331B2 true JP6855331B2 (ja) | 2021-04-07 |
Family
ID=64820371
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017114593A Active JP6855331B2 (ja) | 2017-06-09 | 2017-06-09 | 画像転送装置、画像診断装置、および画像診断システム |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6855331B2 (ja) |
| CN (1) | CN109068091A (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7202195B2 (ja) * | 2019-01-23 | 2023-01-11 | 本田技研工業株式会社 | 表示システム、走行制御装置、表示制御方法およびプログラム |
| US20220130185A1 (en) * | 2020-10-23 | 2022-04-28 | Argo AI, LLC | Enhanced sensor health and regression testing for vehicles |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE112008004279A5 (de) * | 2007-02-16 | 2015-04-23 | Autonetworks Technologies, Ltd. | In ein Fahrzeug eingebautes Videokommunikationssystem und in ein Fahrzeug eingebautes Bildaufnahmesystem |
| JP5592138B2 (ja) * | 2010-03-31 | 2014-09-17 | 富士通テン株式会社 | 画像生成装置、画像表示システム及び画像生成方法 |
| DE102011077143A1 (de) * | 2011-06-07 | 2012-12-13 | Robert Bosch Gmbh | Fahrzeugkamerasystem und Verfahren zur Bereitstellung eines lückenlosen Bildes der Fahrzeugumgebung |
| WO2012172923A1 (ja) * | 2011-06-16 | 2012-12-20 | アイシン精機株式会社 | 車両周辺監視装置 |
| CN102387349B (zh) * | 2011-10-31 | 2014-12-10 | 深圳市长宇电器有限公司 | 车载摄像头取得图像的显示方法及装置 |
| US9387813B1 (en) * | 2012-03-21 | 2016-07-12 | Road-Iq, Llc | Device, system and method for aggregating networks and serving data from those networks to computers |
| JP2014011785A (ja) * | 2012-07-03 | 2014-01-20 | Clarion Co Ltd | 車載カメラ汚れ除去装置の診断装置、診断方法及び車両システム |
| CN103676922B (zh) * | 2012-09-07 | 2016-12-21 | 博世汽车服务技术(苏州)有限公司 | 一种远程诊断的方法 |
| JP6422077B2 (ja) * | 2014-09-30 | 2018-11-14 | 株式会社日本総合研究所 | 俯瞰画像表示システム、端末装置、及びそのプログラム |
| JP6453645B2 (ja) * | 2014-12-25 | 2019-01-16 | 京セラ株式会社 | ステレオカメラ装置、移動体、ステレオカメラシステム、サーバ装置及び制御方法 |
-
2017
- 2017-06-09 JP JP2017114593A patent/JP6855331B2/ja active Active
-
2018
- 2018-06-05 CN CN201810569394.0A patent/CN109068091A/zh active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018207458A (ja) | 2018-12-27 |
| CN109068091A (zh) | 2018-12-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2990265B1 (en) | Vehicle control apparatus | |
| JP6555348B2 (ja) | 画像表示制御装置 | |
| JP7180144B2 (ja) | 運転支援装置 | |
| WO2018159017A1 (ja) | 車両用表示制御装置、車両用表示システム、車両用表示制御方法およびプログラム | |
| CN109070801B (zh) | 使用后置相机的拖车角度检测 | |
| CN107791951B (zh) | 显示控制装置 | |
| WO2018003193A1 (ja) | 周辺監視装置 | |
| JP2018133712A (ja) | 周辺監視装置 | |
| JP6855331B2 (ja) | 画像転送装置、画像診断装置、および画像診断システム | |
| JP2008195268A (ja) | 車両周辺監視装置 | |
| US20200317267A1 (en) | Parking assistance device | |
| US8581984B2 (en) | Vehicle circumference monitor apparatus | |
| CN112118417A (zh) | 车辆侧后方影像显示装置及方法 | |
| JP6054738B2 (ja) | カメラモジュール、カメラシステムおよび画像表示方法 | |
| JP2019069718A (ja) | 運転支援装置 | |
| JP2018076019A (ja) | 画像処理装置 | |
| JP7130923B2 (ja) | 表示制御装置 | |
| JP2017143482A (ja) | 車両用画像表示装置 | |
| JP2001045470A (ja) | 車両用確認装置 | |
| US11833973B2 (en) | Vehicle display device, vehicle display method, and non-transitory computer-readable medium storing vehicle display program | |
| WO2024000333A1 (zh) | 电子后视镜系统和车辆 | |
| JP6699462B2 (ja) | 周辺監視装置 | |
| JP2006325068A (ja) | 画像処理用電子制御装置、画像処理システム、画像撮像処理システム、画像表示システム、画像撮像表示システム | |
| JP6742423B2 (ja) | 画像処理装置 | |
| JP2019068326A (ja) | 周辺監視装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7426 Effective date: 20170629 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20170629 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200306 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20201105 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201222 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210215 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210302 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210317 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6855331 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |