JP6777561B2 - ロボットアームのハーネス接続構造、及び多関節溶接ロボット - Google Patents
ロボットアームのハーネス接続構造、及び多関節溶接ロボット Download PDFInfo
- Publication number
- JP6777561B2 JP6777561B2 JP2017017110A JP2017017110A JP6777561B2 JP 6777561 B2 JP6777561 B2 JP 6777561B2 JP 2017017110 A JP2017017110 A JP 2017017110A JP 2017017110 A JP2017017110 A JP 2017017110A JP 6777561 B2 JP6777561 B2 JP 6777561B2
- Authority
- JP
- Japan
- Prior art keywords
- arm
- harness
- robot
- drive shaft
- connection structure
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0025—Means for supplying energy to the end effector
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/0019—End effectors other than grippers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J18/00—Arms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J18/00—Arms
- B25J18/02—Arms extensible
- B25J18/04—Arms extensible rotatable
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0075—Means for protecting the manipulator from its environment or vice versa
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/02—Program-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type
- B25J9/04—Program-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type by rotating at least one arm, excluding the head movement itself, e.g. cylindrical coordinate type or polar coordinate type
- B25J9/046—Revolute coordinate type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/10—Program-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/1005—Program-controlled manipulators characterised by positioning means for manipulator elements comprising adjusting means
- B25J9/101—Program-controlled manipulators characterised by positioning means for manipulator elements comprising adjusting means using limit-switches, -stops
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02G—INSTALLATION OF ELECTRIC CABLES OR LINES, OR OF COMBINED OPTICAL AND ELECTRIC CABLES OR LINES
- H02G11/00—Arrangements of electric cables or lines between relatively-movable parts
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
Description
しかし、アームが逆回転方向に駆動される場合、アームに接続されているハーネスの曲げ半径が、局所的にハーネスの許容曲げ半径よりも小さい曲げ半径にされる場合が生じる。また、捩れによる外力がハーネスに負荷されたり、ハーネスがアーム同士に挟まれたりする。そのため、アーム外側のハーネスをアーム内に導入する開口部は、アーム同士を連結するアーム関節部から離して配置せざるを得ない。しかし、アーム関節部が、アーム駆動用のモータを内蔵している場合には、モータによる駆動部材等が配置される部位に開口部を設けることはできず、開口部はモータ駆動に影響を受けない固定部位に配置する必要がある。そこで、開口部の配置スペースを確保するために、アーム関節部をモータの配置位置から外れた関節中心から離れた位置まで延在させることになる。その結果、アーム関節部が大型化し、アーム関節部の重量が増大して駆動時における振動の発生原因となる。例えば、6軸ロボットの場合、下部アームと上部アームとを連結するアーム関節部には、上部アームの第3駆動軸を回転駆動するモータと、手首旋回用の第4駆動軸を回転駆動するモータとが共に収容されるものがある。その場合、ハーネスの引き回しのためにアーム関節部の大型化は避けられない。
ロボットアームのハーネス接続構造である。
このロボットアームのハーネス接続構造によれば、上部アームがいかなる姿勢であっても、ハーネスの曲げにより生じる損傷を防止できる。また、仮にハーネスが許容曲げ半径にまで湾曲された場合でも、ハーネスと下部アームの先端部との干渉が避けられる。
このロボットアームのハーネス接続構造によれば、アームが駆動された際に、第1ストッパと第2ストッパとの間にハーネスが挟まれることを防止できる。
また、ロボットアームのハーネス接続構造は、前記ハーネス固定部と前記第1アームとの間に、前記第2ストッパ部の支持部が配置され、前記支持部は、前記第2アームの長手方向に関して、前記第2ストッパ部の配置側と反対側に前記傾斜面と繋がるガイドを有するのが好ましい。
このロボットアームのハーネス接続構造によれば、モータに接続される信号線や電源線等の導電線が、小さな曲率半径で湾曲されることなくハーネス内に収容され、長期にわたり導電線を確実に保護できる。
この多関節溶接ロボットによれば、アーム関節部が軽量化され、振動の発生が抑制さえるため、高精度な溶接が行える。
この多関節溶接ロボットによれば、慣性力が生じやすい第3駆動軸を有する第2アームのアーム関節部を小型軽量化でき、モータ駆動に起因するエンドエフェクタ側での振動発生を抑制できる。
図1は溶接システムの全体構成図である。
溶接システム100は、多関節溶接ロボット11と、制御装置13と、溶接電源15と、教示コントローラ17を備える。多関節溶接ロボット(以降、溶接ロボットと略称する)11の先端軸には、エンドエフェクタ19が接続される。本構成のエンドエフェクタ19は、溶接トーチ21を有するトーチ支持部23である。また、エンドエフェクタ19としては、トーチ支持部23の他に、溶接トーチをウィービング動作させる2軸ウィーバーや、切断機等の他のツールも採用できる。
図2は溶接ロボットの一例を示す外観斜視図、図3は図2に示す溶接ロボットの駆動軸を模式的に示す説明図である。
ここで示す溶接ロボット11は、一般的な6つの駆動軸を有する6軸ロボットである。溶接ロボット11は、ここで例示する6軸ロボットの以外にも、例えば7軸ロボットや、他の構成の多軸ロボットであってもよい。
下部アーム35の先端部51に固定された第3駆動軸S3となる軸体(不図示)には、上部アーム37の基端部53のアーム関節部49が支持される。アーム関節部49は、上部アーム37を第3駆動軸S3回りに駆動するS3モータ(不図示)と、上部アーム37の先端側を第4駆動軸S4回りに駆動するS4モータが内蔵された、1つのブロック体として構成される。つまり、上部アーム37は、基端側のアーム関節部49と、アーム関節部49に第4駆動軸S4回りに回転可能に支持され、先端部に手首旋回部39が取り付けられた回転軸部45と、を有して構成される。
上記のハーネス接続構造を有するアーム関節部49とハーネス55によれば、ハーネス55は、アーム関節部49から上部アーム37の逆回転方向の後方に向けて延出されることになる。そのため、上部アーム37が原点姿勢から逆回転方向に約−180°の反転位置に駆動されても、ハーネス55は、局所的に小さな曲率半径で湾曲することなく、下部アーム35の先端部51から滑らかなカーブを描いてアーム関節部49のハーネス固定部59まで配置される。
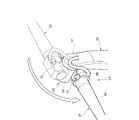
図8は上部アーム37の下部アーム35に対する各回転位置におけるハーネス固定部59の開口部67の位置関係を示す説明図である。
上部アーム37が原点姿勢(θ=0°)から第3駆動軸S3を中心に逆回転方向に駆動され、反転位置(θ=−180°)に配置された場合、ハーネス固定部59の開口部67は下部アーム35と重ならない。しかし、上部アーム37を更に逆回転方向に駆動して、開口部67が下部アーム35に重なる位置(θ=θc)に達した場合には、ハーネスが上部アーム37と下部アーム35との間に挟まれないようにする必要がある。
ここで、上部アーム37に形成されたハーネス固定部59の対向壁部65と、下部アーム35のアーム関節部49に対面する内側面81との間に、隙間が殆どなく、ハーネス55が第3駆動軸S3と略平行にハーネス固定部59内に導入される場合を考える。この場合、上部アーム37の第3駆動軸S3を中心とする回転駆動によって、開口部67の開口領域が、下部アーム35の側面部83よりも下部アーム35の長手方向に直交する幅方向(図中上下方向)の内側の領域、つまり、図中の下部アーム35の上下方向幅内に入り込もうとする。すると、開口部67に導入されたハーネス55が、下部アーム35の側面部83に挟まれて、ハーネス55に剪断力が負荷される。
ここでは、ハーネス固定部59の対向壁部65と、下部アーム35の内側面81との間に配置される第2ストッパ部75の支持部76における、第2ストッパ部75の配置側と反対側に、ハーネス55をガイドする傾斜面76aを設け、開口部67からハーネス55を傾斜させて突出させた場合を考える。
上部アーム37の基端側(下部アーム35側)から、上部アーム37内にハーネス55を導入すれば、上部アーム37の前後両方向への動作範囲を大きくできる。しかし、その場合には、第3駆動軸S3と第4駆動軸S4とのアーム関節部49の上下高さが増すため、ロボット剛性の低下につながり、適切な溶接トーチの移動精度の確保が難しくなる。更に、ハーネス55が被溶接物(ワーク)に近づくことになる為、ロボット動作中のハーネス55へ損傷の可能性が高まることになる。そして、第3駆動軸S3を中空構造の減速機を用いて、中空孔からハーネスを引き入れることも考えられるが、その場合はコストが高くなる。
19 エンドエフェクタ
21 溶接トーチ
31 ベース
33 旋回部
35 下部アーム(第1アーム)
37 上部アーム(第2アーム)
49 アーム関節部
51 先端部
53 基端部
55 ハーネス
57 ハーネス保持部
59 ハーネス固定部
67 開口部
73 第1ストッパ部
75 第2ストッパ部
81 内側面
Claims (7)
- 第1アームと、
前記第1アームの先端部に、アーム関節部を介して基端側が回転可能に連結された第2アームと、
前記第1アームの前記先端部から延設され、前記第2アームの前記アーム関節部でアーム内部に導入されるハーネスと、
を備え、
前記第1アームの前記先端部は、前記ハーネスの長手方向一方の側を保持するハーネス保持部を有し、
前記アーム関節部は、前記ハーネスの長手方向他方の側を、前記アーム関節部内に固定するハーネス固定部を有し、
前記ハーネス固定部は、前記ハーネスの長手方向他方の側を、前記第2アームの先端側から基端側に向かって、前記第2アームの長手軸に対して傾斜して挿入した姿勢で前記アーム関節部内に固定されるようにガイドする傾斜面を有し、
前記ハーネスは、前記ハーネス固定部から前記第2アームの先端側へ延出され、湾曲して前記ハーネス保持部に保持されている、
ロボットアームのハーネス接続構造。 - 前記ハーネスは、前記ハーネス固定部により傾斜されて生じる湾曲が、前記ハーネスの許容曲げ半径以上であり、
前記ハーネスの湾曲内側表面に対する曲率半径の円弧ラインの径方向内側に、前記第1アームの先端部が配置される請求項1に記載のロボットアームのハーネス接続構造。 - 前記第1アームは、第1ストッパ部を有し、
前記第2アームは、前記第2アームの回転方向先方で前記第1ストッパ部に突き当たる第2ストッパ部を有し、
前記第2ストッパ部は、前記第2アームの前記ハーネスがアーム内に導入される開口部及びハーネスよりも前記回転方向先方に配置された請求項1又は請求項2に記載のロボットアームのハーネス接続構造。 - 前記ハーネス固定部と前記第1アームとの間に、前記第2ストッパ部の支持部が配置され、
前記支持部は、前記第2アームの長手方向に関して、前記第2ストッパ部の配置側と反対側に前記傾斜面と繋がるガイドを有する、請求項3に記載のロボットアームのハーネス接続構造。 - 前記ハーネスは、前記第2アームを回転駆動するモータに接続される導電線が内挿された請求項1〜請求項4のいずれか一項に記載のロボットアームのハーネス接続構造。
- 請求項1〜請求項5のいずれか一項に記載のロボットアームのハーネス接続構造を有する多関節溶接ロボット。
- ベース上に鉛直方向に沿った第1駆動軸回りに旋回可能に設けられた旋回部と、
前記旋回部に水平方向に沿った第2駆動軸を介して基端部が連結された前記第1アームと、
前記第1アームの先端部に、前記第2駆動軸と平行な第3駆動軸回りに回転可能に連結された前記第2アームと、
を備える請求項6に記載の多関節溶接ロボット。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017017110A JP6777561B2 (ja) | 2017-02-01 | 2017-02-01 | ロボットアームのハーネス接続構造、及び多関節溶接ロボット |
| US16/476,768 US11141869B2 (en) | 2017-02-01 | 2018-01-15 | Robot-arm harness connection structure and multi-joined welding robot |
| PCT/JP2018/000794 WO2018142893A1 (ja) | 2017-02-01 | 2018-01-15 | ロボットアームのハーネス接続構造、及び多関節溶接ロボット |
| CN201880009526.2A CN110234474B (zh) | 2017-02-01 | 2018-01-15 | 机器人手臂的线束连接结构、以及多关节焊接机器人 |
| KR1020197022490A KR102298831B1 (ko) | 2017-02-01 | 2018-01-15 | 로봇 아암의 하니스 접속 구조, 및 다관절 용접 로봇 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017017110A JP6777561B2 (ja) | 2017-02-01 | 2017-02-01 | ロボットアームのハーネス接続構造、及び多関節溶接ロボット |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018122405A JP2018122405A (ja) | 2018-08-09 |
| JP6777561B2 true JP6777561B2 (ja) | 2020-10-28 |
Family
ID=63039639
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017017110A Active JP6777561B2 (ja) | 2017-02-01 | 2017-02-01 | ロボットアームのハーネス接続構造、及び多関節溶接ロボット |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11141869B2 (ja) |
| JP (1) | JP6777561B2 (ja) |
| KR (1) | KR102298831B1 (ja) |
| CN (1) | CN110234474B (ja) |
| WO (1) | WO2018142893A1 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6773718B2 (ja) * | 2018-04-20 | 2020-10-21 | ファナック株式会社 | ロボット |
| US10857677B2 (en) * | 2018-10-04 | 2020-12-08 | Caterpillar Inc. | Tip attachment to aid in programming a collaborative robot |
| JP7451889B2 (ja) * | 2019-06-27 | 2024-03-19 | セイコーエプソン株式会社 | ロボット |
| JP7388887B2 (ja) * | 2019-11-13 | 2023-11-29 | ファナック株式会社 | ロボットの線条体ユニットおよび線条体配線方法 |
| CN113809689B (zh) * | 2021-11-01 | 2023-03-21 | 伯朗特机器人股份有限公司 | 一种工业机器人关节间内部布线方法 |
| CN116021552B (zh) * | 2022-08-17 | 2024-09-13 | 深圳市大族机器人有限公司 | 中空轴组件、关节模组及机器人 |
| WO2026052048A1 (zh) * | 2024-09-06 | 2026-03-12 | 东莞松灵科技有限公司 | 机器人 |
Family Cites Families (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5715198B2 (ja) | 1973-12-14 | 1982-03-29 | ||
| JPH0569381A (ja) * | 1991-09-17 | 1993-03-23 | Mitsubishi Electric Corp | 旋回ケーブルベア装置 |
| IT1272083B (it) * | 1993-12-17 | 1997-06-11 | Comau Spa | Robot industriale con gruppi riduttori integrati. |
| JPH10175188A (ja) * | 1996-12-17 | 1998-06-30 | Fanuc Ltd | ロボットの構造 |
| JP4142304B2 (ja) | 2001-10-22 | 2008-09-03 | 株式会社安川電機 | アーク溶接用ロボット |
| JP2003305684A (ja) * | 2002-04-15 | 2003-10-28 | Fanuc Ltd | 相対回転機構における線条体敷設構造 |
| ITTO20030139A1 (it) * | 2003-02-27 | 2004-08-28 | Comau Spa | Robot industriale |
| JP4168008B2 (ja) * | 2004-06-04 | 2008-10-22 | ファナック株式会社 | 産業用ロボットの線条体処理構造 |
| JP2005342859A (ja) * | 2004-06-04 | 2005-12-15 | Fanuc Ltd | 産業用ロボット |
| JP3944208B2 (ja) * | 2004-12-02 | 2007-07-11 | ファナック株式会社 | ロボットの線条体案内装置及び線条体案内装置を備えたロボット |
| JP2008238320A (ja) * | 2007-03-27 | 2008-10-09 | Fanuc Ltd | 作業ツールを備えたロボット |
| JP2009006454A (ja) * | 2007-06-29 | 2009-01-15 | Daihen Corp | 溶接ロボットにおけるワイヤ送給装置の設置方法、溶接ロボットにおけるワイヤ送給装置の設置構造及び溶接ロボット |
| JP5180621B2 (ja) * | 2008-03-04 | 2013-04-10 | 本田技研工業株式会社 | 多関節ロボット |
| JP5319385B2 (ja) * | 2009-05-12 | 2013-10-16 | 株式会社ダイヘン | アーク溶接ロボットのケーブル配設構造 |
| JP5450223B2 (ja) * | 2010-04-14 | 2014-03-26 | 株式会社ダイヘン | 産業用ロボット |
| JP5344315B2 (ja) * | 2010-11-04 | 2013-11-20 | 株式会社安川電機 | ロボットの手首構造及びロボット |
| CN103056877B (zh) * | 2011-10-21 | 2015-07-29 | 鸿富锦精密工业(深圳)有限公司 | 机械手 |
| JP5591894B2 (ja) * | 2012-09-26 | 2014-09-17 | ファナック株式会社 | ロボットの線条体取付装置 |
| JP5661718B2 (ja) * | 2012-10-12 | 2015-01-28 | ファナック株式会社 | ロボットの線条体取付装置 |
| JP5698783B2 (ja) * | 2013-03-29 | 2015-04-08 | ファナック株式会社 | 分線盤を備えたロボット |
| JP5715198B2 (ja) | 2013-07-05 | 2015-05-07 | ファナック株式会社 | ロボット用駆動ケーブルの処理構造体及びそれを具備するロボット装置 |
| JP5884785B2 (ja) * | 2013-07-30 | 2016-03-15 | 株式会社安川電機 | ロボット |
| JP6299962B2 (ja) * | 2014-02-28 | 2018-03-28 | 株式会社不二越 | 産業用ロボット |
| JP6245096B2 (ja) * | 2014-07-10 | 2017-12-13 | 株式会社安川電機 | ロボットおよびロボットシステム |
| JP6505999B2 (ja) * | 2014-09-05 | 2019-04-24 | ファナック株式会社 | 弾性体を介して線条体を固定する線条体固定装置 |
| JP6054932B2 (ja) | 2014-10-14 | 2016-12-27 | ファナック株式会社 | 線条体の長さの余裕を最適化できる関節構造、及び該関節構造を備えた産業用ロボット |
| JP2016140917A (ja) * | 2015-01-29 | 2016-08-08 | 株式会社安川電機 | ロボット |
-
2017
- 2017-02-01 JP JP2017017110A patent/JP6777561B2/ja active Active
-
2018
- 2018-01-15 KR KR1020197022490A patent/KR102298831B1/ko active Active
- 2018-01-15 CN CN201880009526.2A patent/CN110234474B/zh active Active
- 2018-01-15 US US16/476,768 patent/US11141869B2/en active Active
- 2018-01-15 WO PCT/JP2018/000794 patent/WO2018142893A1/ja not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| CN110234474B (zh) | 2022-06-24 |
| WO2018142893A1 (ja) | 2018-08-09 |
| JP2018122405A (ja) | 2018-08-09 |
| US20190329428A1 (en) | 2019-10-31 |
| US11141869B2 (en) | 2021-10-12 |
| CN110234474A (zh) | 2019-09-13 |
| KR20190104363A (ko) | 2019-09-09 |
| KR102298831B1 (ko) | 2021-09-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6777561B2 (ja) | ロボットアームのハーネス接続構造、及び多関節溶接ロボット | |
| JP6792470B2 (ja) | 多関節溶接ロボット | |
| JP5715198B2 (ja) | ロボット用駆動ケーブルの処理構造体及びそれを具備するロボット装置 | |
| JP4741639B2 (ja) | アーク溶接用ロボット | |
| JP5884785B2 (ja) | ロボット | |
| KR102578354B1 (ko) | 천장 현수식의 산업용 로봇 | |
| JP4038217B2 (ja) | 産業用ロボットの線条体処理構造 | |
| JP4865882B2 (ja) | ロボット手首部の線条体配設機構 | |
| JP2008238320A (ja) | 作業ツールを備えたロボット | |
| JP6771288B2 (ja) | 溶接装置及び溶接装置の制御方法 | |
| CN106103015B (zh) | 激光加工机器人 | |
| US11400538B2 (en) | Articulated welding robot | |
| JP2016165747A (ja) | 溶接ワイヤの送給性を監視する溶接ロボット | |
| JP2010036253A (ja) | 溶接ロボット | |
| JP2001260068A (ja) | 多関節形ロボットの手首軸装置 | |
| JP5895914B2 (ja) | ロボット | |
| JP2001260069A (ja) | 多関節形ロボットにおける加工ツール取付ブラケット | |
| JP2016078146A (ja) | 線条体の長さの余裕を最適化できる関節構造、及び該関節構造を備えた産業用ロボット |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190930 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200602 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200729 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200929 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201008 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6777561 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |