JP6743770B2 - ポジションセンサ - Google Patents
ポジションセンサ Download PDFInfo
- Publication number
- JP6743770B2 JP6743770B2 JP2017118778A JP2017118778A JP6743770B2 JP 6743770 B2 JP6743770 B2 JP 6743770B2 JP 2017118778 A JP2017118778 A JP 2017118778A JP 2017118778 A JP2017118778 A JP 2017118778A JP 6743770 B2 JP6743770 B2 JP 6743770B2
- Authority
- JP
- Japan
- Prior art keywords
- detection
- bridge circuit
- half bridge
- signal
- sensor chip
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001514 detection method Methods 0.000 claims description 136
- 230000008859 change Effects 0.000 claims description 19
- 238000010586 diagram Methods 0.000 description 12
- 230000009977 dual effect Effects 0.000 description 12
- 230000004048 modification Effects 0.000 description 7
- 238000012986 modification Methods 0.000 description 7
- 230000000052 comparative effect Effects 0.000 description 6
- 239000011347 resin Substances 0.000 description 6
- 229920005989 resin Polymers 0.000 description 6
- 239000010410 layer Substances 0.000 description 5
- 230000005484 gravity Effects 0.000 description 3
- 239000011229 interlayer Substances 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 230000009955 peripheral mechanism Effects 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 230000008901 benefit Effects 0.000 description 2
- 239000000696 magnetic material Substances 0.000 description 2
- 230000001681 protective effect Effects 0.000 description 2
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
- 238000000465 moulding Methods 0.000 description 1
- 230000009897 systematic effect Effects 0.000 description 1
Images



























Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/244—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains
- G01D5/24428—Error prevention
- G01D5/24433—Error prevention by mechanical means
- G01D5/24438—Special design of the sensing element or scale
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/142—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices
- G01D5/145—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices influenced by the relative movement between the Hall device and magnetic fields
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B7/00—Measuring arrangements characterised by the use of electric or magnetic techniques
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D11/00—Component parts of measuring arrangements not specially adapted for a specific variable
- G01D11/30—Supports specially adapted for an instrument; Supports specially adapted for a set of instruments
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
Description
請求項1に記載の発明では、一面において、第1ハーフブリッジ回路の配線パターンと、第2ハーフブリッジ回路の配線パターンと、が同一領域内に混在して形成されている。
請求項2に記載の発明では、第1ハーフブリッジ回路及び第2ハーフブリッジ回路は、センサチップの一面の垂直方向に階層状に配置され、第1ハーフブリッジ回路及び第2ハーフブリッジ回路のうちのいずれか一方の配線パターンがセンサチップの一面側に位置するように各ハーフブリッジ回路の配線パターンが層状に設けられている。
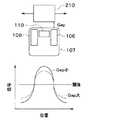
以下、本発明の第1実施形態について図を参照して説明する。本実施形態に係るポジションセンサは、検出対象の位置がどの範囲(状態)にあるのかを検出し、その範囲に対応した信号を出力するセンサである。
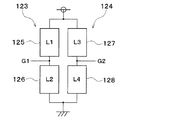
本実施形態では、第1実施形態と異なる部分について説明する。図23及び図24に示されるように、第1ハーフブリッジ回路123及び第2ハーフブリッジ回路124は、センサチップ110の一面129に階層状に配置されている。本実施形態では、第1ハーフブリッジ回路123の配線パターンがセンサチップ110の一面129側に位置するように各ハーフブリッジ回路123、124の配線パターンが層状に設けられている。
本実施形態では、第1、第2実施形態と異なる部分について説明する。ホール素子を用いた磁気検出方式を採用した場合、図25の平面模式図及び図26の断面模式図に示されるように、モールドIC部105は、保持部107に差し込まれて固定される。また、モールドIC部105は、リードフレーム108、ICチップ141、磁石142、及びモールド樹脂部111を有している。
上記各実施形態で示されたポジションセンサ100の構成は一例であり、上記で示した構成に限定されることなく、本発明を実現できる他の構成とすることもできる。例えば、ポジションセンサ100の用途は車両用に限られず、可動部品の位置を検出するものとして産業用ロボットや製造設備等にも広く利用できる。
119 検出部
121、122 磁気抵抗素子
123、124 ハーフブリッジ回路
129 一面
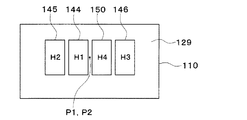
144〜146、150 ホール素子
Claims (3)
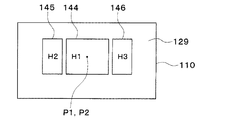
- 一面(129)を有するセンサチップ(110)と、前記センサチップに設けられた第1検出素子(121、144、150)と、前記センサチップに設けられた第2検出素子(122、145、146)と、を有する検出部(119)と、
前記検出部から入力される信号を処理する信号処理部(120)と、
を備え、
前記第1検出素子は、第1ハーフブリッジ回路(123)を構成し、検出対象(200)から受ける磁界の変化に基づいて、前記検出対象の位置に対応した第1検出信号を出力し、
前記第2検出素子は、第2ハーフブリッジ回路(124)を構成し、前記検出対象から受ける磁界の変化に基づいて、前記検出対象の位置に対応した第2検出信号を出力し、
さらに、前記一面の面内における前記第1検出素子のバランスの中心が、前記一面の面内における前記第2検出素子のバランスの中心と一致しており、
前記一面において、前記第1ハーフブリッジ回路の配線パターンと、前記第2ハーフブリッジ回路の配線パターンと、が同一領域内に混在して形成されているポジションセンサ。 - 一面(129)を有するセンサチップ(110)と、前記センサチップに設けられた第1検出素子(121、144、150)と、前記センサチップに設けられた第2検出素子(122、145、146)と、を有する検出部(119)と、
前記検出部から入力される信号を処理する信号処理部(120)と、
を備え、
前記第1検出素子は、第1ハーフブリッジ回路(123)を構成し、検出対象(200)から受ける磁界の変化に基づいて、前記検出対象の位置に対応した第1検出信号を出力し、
前記第2検出素子は、第2ハーフブリッジ回路(124)を構成し、前記検出対象から受ける磁界の変化に基づいて、前記検出対象の位置に対応した第2検出信号を出力し、
さらに、前記一面の面内における前記第1検出素子のバランスの中心が、前記一面の面内における前記第2検出素子のバランスの中心と一致しており、
前記第1ハーフブリッジ回路及び前記第2ハーフブリッジ回路は、前記センサチップの前記一面の垂直方向に階層状に配置され、前記第1ハーフブリッジ回路及び前記第2ハーフブリッジ回路のうちのいずれか一方の配線パターンが前記センサチップの前記一面側に位置するように前記各ハーフブリッジ回路の配線パターンが層状に設けられているポジションセンサ。 - 前記検出対象は、車両のシフトポジションの動作に連動して移動する可動部品である請求項1または2に記載のポジションセンサ。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017118778A JP6743770B2 (ja) | 2017-06-16 | 2017-06-16 | ポジションセンサ |
| CN201880039451.2A CN110741230B (zh) | 2017-06-16 | 2018-05-17 | 位置传感器 |
| DE112018003054.7T DE112018003054T5 (de) | 2017-06-16 | 2018-05-17 | Positionssensor |
| PCT/JP2018/019060 WO2018230243A1 (ja) | 2017-06-16 | 2018-05-17 | ポジションセンサ |
| US16/697,902 US11733063B2 (en) | 2017-06-16 | 2019-11-27 | Position sensor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017118778A JP6743770B2 (ja) | 2017-06-16 | 2017-06-16 | ポジションセンサ |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019002836A JP2019002836A (ja) | 2019-01-10 |
| JP2019002836A5 JP2019002836A5 (ja) | 2019-06-20 |
| JP6743770B2 true JP6743770B2 (ja) | 2020-08-19 |
Family
ID=64660839
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017118778A Active JP6743770B2 (ja) | 2017-06-16 | 2017-06-16 | ポジションセンサ |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11733063B2 (ja) |
| JP (1) | JP6743770B2 (ja) |
| CN (1) | CN110741230B (ja) |
| DE (1) | DE112018003054T5 (ja) |
| WO (1) | WO2018230243A1 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019002469A (ja) | 2017-06-14 | 2019-01-10 | 株式会社デンソー | ポジションセンサ |
| JP6791033B2 (ja) | 2017-06-16 | 2020-11-25 | 株式会社デンソー | ポジションセンサ |
| US11686788B2 (en) | 2021-07-08 | 2023-06-27 | Tdk Corporation | Magnetic sensor device and magnetic sensor system |
| CN113418440A (zh) * | 2021-08-05 | 2021-09-21 | 重庆编福科技有限公司 | 一种非接触式位置检测方法 |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6452381B1 (en) * | 1997-11-28 | 2002-09-17 | Denso Corporation | Magnetoresistive type position detecting device |
| JP4293037B2 (ja) * | 2004-04-13 | 2009-07-08 | 株式会社デンソー | 回転検出装置 |
| JP4466355B2 (ja) | 2004-06-23 | 2010-05-26 | 株式会社デンソー | 回転検出装置 |
| JP2006300779A (ja) | 2005-04-21 | 2006-11-02 | Denso Corp | 回転検出装置 |
| JP2009014454A (ja) * | 2007-07-03 | 2009-01-22 | Tokai Rika Co Ltd | 位置検出装置 |
| JP5014968B2 (ja) * | 2007-12-07 | 2012-08-29 | 株式会社東海理化電機製作所 | ポジションセンサ |
| EP2634592B1 (en) * | 2009-07-22 | 2015-01-14 | Allegro Microsystems, LLC | Circuits and methods for generating a diagnostic mode of operation in a magnetic field sensor |
| JP5249156B2 (ja) | 2009-08-21 | 2013-07-31 | 株式会社東海理化電機製作所 | 多重系磁気センサのセンサパターン配置構造及びその製造方法 |
| CN102298126B (zh) * | 2011-01-17 | 2013-03-13 | 江苏多维科技有限公司 | 独立封装的桥式磁场传感器 |
| JP6064816B2 (ja) * | 2013-07-17 | 2017-01-25 | 株式会社デンソー | 回転センサ |
| JP2015108527A (ja) | 2013-12-03 | 2015-06-11 | 株式会社東海理化電機製作所 | 磁気センサ |
| JP2015129700A (ja) | 2014-01-08 | 2015-07-16 | アルプス電気株式会社 | 磁界回転検知センサ及び磁気エンコーダ |
| US9719806B2 (en) | 2014-10-31 | 2017-08-01 | Allegro Microsystems, Llc | Magnetic field sensor for sensing a movement of a ferromagnetic target object |
| CN105890507B (zh) * | 2015-01-08 | 2019-04-16 | 中国人民解放军军械工程学院 | 一种巨磁阻抗传感器对平面内磁性目标的定位方法 |
| US10012518B2 (en) * | 2016-06-08 | 2018-07-03 | Allegro Microsystems, Llc | Magnetic field sensor for sensing a proximity of an object |
| JP2019002469A (ja) | 2017-06-14 | 2019-01-10 | 株式会社デンソー | ポジションセンサ |
| JP6787260B2 (ja) | 2017-06-14 | 2020-11-18 | 株式会社デンソー | ポジションセンサ |
| JP6791033B2 (ja) | 2017-06-16 | 2020-11-25 | 株式会社デンソー | ポジションセンサ |
-
2017
- 2017-06-16 JP JP2017118778A patent/JP6743770B2/ja active Active
-
2018
- 2018-05-17 CN CN201880039451.2A patent/CN110741230B/zh active Active
- 2018-05-17 WO PCT/JP2018/019060 patent/WO2018230243A1/ja active Application Filing
- 2018-05-17 DE DE112018003054.7T patent/DE112018003054T5/de active Pending
-
2019
- 2019-11-27 US US16/697,902 patent/US11733063B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN110741230B (zh) | 2023-01-17 |
| CN110741230A (zh) | 2020-01-31 |
| WO2018230243A1 (ja) | 2018-12-20 |
| DE112018003054T5 (de) | 2020-03-05 |
| JP2019002836A (ja) | 2019-01-10 |
| US20200096368A1 (en) | 2020-03-26 |
| US11733063B2 (en) | 2023-08-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6743770B2 (ja) | ポジションセンサ | |
| JP6033529B2 (ja) | 検出装置および電流センサ | |
| US9297635B2 (en) | Magnetic sensor system including two detection circuits | |
| CN110741231B (zh) | 位置传感器 | |
| WO2018230087A1 (ja) | ポジションセンサ | |
| CN107561312A (zh) | 用于确定磁组件围绕旋转轴的旋转方向的磁传感器设备和方法 | |
| US20200072593A1 (en) | Position sensor | |
| WO2013171977A1 (ja) | ブリッジ回路、及びこれを有する磁気センサ | |
| JP2015179043A (ja) | 電流センサ | |
| US10921388B2 (en) | Magnetic sensor with three detection units | |
| WO2023053792A1 (ja) | 電流センサ、その補正方法、および、複数の電流センサの補正方法 | |
| JP7119633B2 (ja) | 磁気センサ | |
| JP5128416B2 (ja) | 磁気センサ装置 | |
| WO2014147996A1 (ja) | 電流センサ | |
| WO2021084801A1 (ja) | 電流センサ | |
| JP7043888B2 (ja) | リニアポジションセンサ | |
| US11047926B2 (en) | Magnetic sensor | |
| JP2016115240A (ja) | 乗算回路及びそれを備えた電力センサー | |
| JP7225694B2 (ja) | 磁気センサ | |
| WO2021140724A1 (ja) | 位置検出装置 | |
| US9869730B2 (en) | Magnetic detection apparatus | |
| WO2019167440A1 (ja) | リニアポジションセンサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190520 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190711 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200421 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200519 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200630 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200713 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6743770 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |