JP6597441B2 - モータの制御装置 - Google Patents
モータの制御装置 Download PDFInfo
- Publication number
- JP6597441B2 JP6597441B2 JP2016061358A JP2016061358A JP6597441B2 JP 6597441 B2 JP6597441 B2 JP 6597441B2 JP 2016061358 A JP2016061358 A JP 2016061358A JP 2016061358 A JP2016061358 A JP 2016061358A JP 6597441 B2 JP6597441 B2 JP 6597441B2
- Authority
- JP
- Japan
- Prior art keywords
- cooling oil
- coil
- motor
- rotation operation
- operation region
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
- H02P29/60—Controlling or determining the temperature of the motor or of the drive
- H02P29/64—Controlling or determining the temperature of the winding
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/26—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the motors or the generators
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/20—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection for measuring, monitoring, testing, protecting or switching
- H02K11/25—Devices for sensing temperature, or actuated thereby
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K9/00—Arrangements for cooling or ventilating
- H02K9/19—Arrangements for cooling or ventilating for machines with closed casing and closed-circuit cooling using a liquid cooling medium, e.g. oil
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P23/00—Arrangements or methods for the control of AC motors characterised by a control method other than vector control
- H02P23/0086—Arrangements or methods for the control of AC motors characterised by a control method other than vector control specially adapted for high speeds, e.g. above nominal speed
- H02P23/009—Arrangements or methods for the control of AC motors characterised by a control method other than vector control specially adapted for high speeds, e.g. above nominal speed using field weakening
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P23/00—Arrangements or methods for the control of AC motors characterised by a control method other than vector control
- H02P23/14—Estimation or adaptation of motor parameters, e.g. rotor time constant, flux, speed, current or voltage
Description
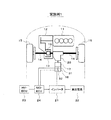
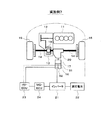
まず、図1に基づいてハイブリッド車の制御システムの概略構成を説明する。
車両の動力源となるエンジン11と、このエンジン11に接続された変速機12とが車両の前側部に搭載されている。変速機12は、機械式の変速機であり、複数の変速段の中から変速段を段階的に切り換える有段変速機であっても良いし、無段階に変速する無段変速機(いわゆるCVT)であっても良い。これらのエンジン11及び変速機12は、エンジン11の出力軸(つまりクランク軸)の軸方向が車両の左右方向となるように横置きで配置されている。エンジン11の出力軸の動力が変速機12に伝達され、この変速機12の出力軸の動力がディファレンシャルギヤ機構13等を介して車輪15の駆動軸14に伝達される。
MG16は、例えば三相永久磁石式同期モータで、永久磁石が内蔵されたものであり、ロータ27の回転位置θ(つまり回転角)を検出する回転位置センサ38が搭載されている。インバータ21は、MG−ECU24から出力される三相の6アーム電圧指令信号UU,UL,VU,VL,WU,WLに基づいて、高圧電池22の直流電圧を三相の交流電圧U,V,Wに変換してMG16を駆動する。MG16のU相に流れるU相電流iu やW相に流れるW相電流iw が電流センサ34によって検出される。
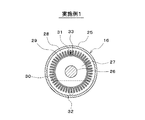
図3及び図4に示すように、MG16のハウジング25内には、回転軸26と一体的に回転するロータ27と、このロータ27の外周側に配置されたステータ28とが設けられている。ステータ28には、複数の相巻線よりなるコイル29が巻装されている。
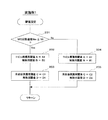
図6に示す過熱防止制御ルーチンは、MG−ECU24の電源オン期間中に所定周期で繰り返し実行され、特許請求の範囲でいう制御部としての役割を果たす。また、図7に示す閾値設定ルーチンは、図6のステップ101で実行されるサブルーチンであり、特許請求の範囲でいう制御部としての役割を果たす。
コイル保護用閾値A=A2
解除用閾値B=B2
冷却油保護用閾値C=C1
解除用閾値D=D1
コイル保護用閾値A=A1
解除用閾値B=B1
冷却油保護用閾値C=C2
解除用閾値D=D2
ステップ106では、冷却油温度センサ32で検出した冷却油30の温度To が冷却油保護用閾値Cよりも高いか否かを判定する。
このステップ108で、冷却油30の温度To が解除用閾値Dよりも低いと判定された場合には、ステップ109に進み、冷却油保護用トルク制限を解除する。
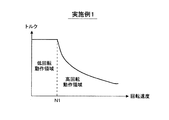
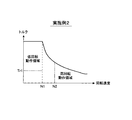
このステップ301で、MG16の回転速度Nm が所定回転速度N1 以下と判定された場合には、低回転動作領域と判定する。この場合、ステップ302に進み、MG16のトルクTm が所定値Tr1よりも大きいか否かを判定する。
コイル保護用閾値A=A2
解除用閾値B=B2
冷却油保護用閾値C=C1
解除用閾値D=D1
コイル保護用閾値A=A1
解除用閾値B=B1
これにより、低回転動作領域で且つMG16のトルクTm が所定値Tr1以下の領域では、コイル保護用閾値Aを高回転動作領域と同じ値に設定する。
冷却油保護用閾値C=C1
解除用閾値D=D1
解除用閾値B=B1
冷却油保護用閾値C=C2
解除用閾値D=D2
コイル保護用閾値A=A1
解除用閾値B=B1
冷却油保護用閾値C=C1
解除用閾値D=D1
これにより、高回転動作領域で且つMG16の回転速度Nm が所定値N2 以下の領域では、冷却油保護用閾値Cを低回転動作領域と同じ値に設定する。
尚、上記各実施例において、MG−ECU24やHV−ECU23が実行する機能の一部又は全部を、一つ或は複数のIC等によりハードウェア的に構成しても良い。
Claims (18)
- ハウジング(25)内にステータ(28)とロータ(27)とが配置されて構成されたモータ(16)と前記ハウジング内の冷却油(30)で冷却される前記モータの制御装置において、
前記冷却油は、前記ハウジング内の密閉空間に封入されており、
前記モータの回転停止時に、前記冷却油は、前記ハウジング内において、前記ロータの最下位面よりも上方であり、且つ前記ロータの回転軸よりも下方の高さ位置まで貯溜されており、
前記ステータに設けられたコイル(29)の温度を検出するコイル温度検出手段(31)と、
前記冷却油の温度を検出する冷却油温度検出手段(32)と、
前記コイル温度検出手段で検出した前記コイルの温度がコイル保護用の閾値を越えた場合に前記モータのトルクを制限するコイル保護用トルク制限と、前記冷却油温度検出手段で検出した前記冷却油の温度が冷却油保護用の閾値を越えた場合に前記モータのトルクを制限する冷却油保護用トルク制限とを実行する制御部(24)とを備え、
前記制御部は、前記モータが所定以下の低回転で動作する低回転動作領域では、前記コイル保護用トルク制限が優先的に実行され易くし、前記モータが前記低回転動作領域よりも高回転で動作する高回転動作領域では、前記冷却油保護用トルク制限が優先的に実行され易くするモータの制御装置。 - 前記制御部は、前記低回転動作領域で前記コイル保護用の閾値を前記高回転動作領域よりも低い値に設定することで前記コイル保護用トルク制限が優先的に実行され易くする請求項1に記載のモータの制御装置。
- 前記制御部は、前記低回転動作領域で且つ前記モータのトルクが所定値以下の領域では前記コイル保護用の閾値を前記高回転動作領域と同じ値に設定する請求項2に記載のモータの制御装置。
- 前記制御部は、前記高回転動作領域で前記冷却油保護用の閾値を前記低回転動作領域よりも低い値に設定することで前記冷却油保護用トルク制限が優先的に実行され易くする請求項1乃至3のいずれかに記載のモータの制御装置。
- 前記制御部は、前記高回転動作領域で且つ前記モータの回転速度が所定値以下の領域では前記冷却油保護用の閾値を前記低回転動作領域と同じ値に設定する請求項4に記載のモータの制御装置。
- 前記低回転動作領域は、前記モータの弱め界磁制御を実施しない非弱め界磁領域である請求項1乃至5のいずれかに記載のモータの制御装置。
- 前記高回転動作領域は、前記モータの弱め界磁制御を実施する弱め界磁領域である請求項1乃至6のいずれかに記載のモータの制御装置。
- 前記コイル温度検出手段は、前記コイルのうち前記モータの回転停止時に前記冷却油に浸漬しない位置に設置されたコイル温度センサである請求項1乃至7のいずれかに記載のモータの制御装置。
- 前記コイル温度センサは、前記コイルの内部に設置されている請求項8に記載のモータの制御装置。
- 前記コイル温度センサは、前記コイルの中性点に設置されている請求項8又は9に記載のモータの制御装置。
- 前記コイル温度センサは、前記コイルのうち前記モータの回転停止時に前記冷却油に浸漬しない範囲内で前記ロータの回転方向の進み側に設置されている請求項8乃至10のいずれかに記載のモータの制御装置。
- 前記冷却油温度検出手段は、前記冷却油に浸漬し且つ前記コイルから離れた位置に設置されている請求項1乃至11のいずれかに記載のモータの制御装置。
- 前記冷却油温度検出手段は、前記ロータの最下位面よりも下方に設置されている請求項12に記載のモータの制御装置。
- 前記冷却油温度検出手段は、前記冷却油に浸漬する範囲内で前記ロータの回転方向の進み側に設置されている請求項12又は13に記載のモータの制御装置。
- 前記コイルは、少なくとも一つの中性点が前記冷却油に浸漬するように配置されている請求項1に記載のモータの制御装置。
- 前記モータは、車両の動力源として搭載されている請求項1乃至15のいずれかに記載のモータの制御装置。
- 前記冷却油温度検出手段は、前記ハウジング内のうち前記車両の前方側に設置されている請求項16に記載のモータの制御装置。
- 前記冷却油温度検出手段は、冷却油温度センサである請求項1乃至17のいずれかに記載のモータの制御装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016061358A JP6597441B2 (ja) | 2016-03-25 | 2016-03-25 | モータの制御装置 |
| PCT/JP2017/003117 WO2017163609A1 (ja) | 2016-03-25 | 2017-01-30 | モータの制御装置 |
| CN201780019702.6A CN108886337B (zh) | 2016-03-25 | 2017-01-30 | 电动机的控制装置 |
| EP17769656.4A EP3435541B1 (en) | 2016-03-25 | 2017-01-30 | Control device of motor |
| US16/087,676 US10601359B2 (en) | 2016-03-25 | 2017-01-30 | Motor-control device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016061358A JP6597441B2 (ja) | 2016-03-25 | 2016-03-25 | モータの制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017175829A JP2017175829A (ja) | 2017-09-28 |
| JP2017175829A5 JP2017175829A5 (ja) | 2018-09-13 |
| JP6597441B2 true JP6597441B2 (ja) | 2019-10-30 |
Family
ID=59901126
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016061358A Active JP6597441B2 (ja) | 2016-03-25 | 2016-03-25 | モータの制御装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10601359B2 (ja) |
| EP (1) | EP3435541B1 (ja) |
| JP (1) | JP6597441B2 (ja) |
| CN (1) | CN108886337B (ja) |
| WO (1) | WO2017163609A1 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7229007B2 (ja) * | 2018-12-19 | 2023-02-27 | 株式会社Subaru | 回転駆動装置 |
| US20230068986A1 (en) * | 2020-01-28 | 2023-03-02 | Hitachi Astemo, Ltd. | Control device |
| CN111987866B (zh) * | 2020-08-14 | 2021-08-24 | 浙江大学 | 永磁电机的温度监测方法及装置、存储介质及风电机组 |
| DE102022003272A1 (de) | 2022-09-06 | 2024-03-07 | Valeo Eautomotive Germany Gmbh | Verfahren zum Anpassen einer Kühlmitteldurchsatzrate einer permanent erregten Synchronmaschine |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4441340B2 (ja) * | 2004-06-23 | 2010-03-31 | 本田技研工業株式会社 | モータ冷却システムおよびハイブリッド車 |
| JP4626479B2 (ja) * | 2005-10-19 | 2011-02-09 | 株式会社日立製作所 | 回転電機 |
| JP4910634B2 (ja) * | 2006-10-27 | 2012-04-04 | 日産自動車株式会社 | モータの温度保護装置、およびモータ温度保護方法 |
| JP2008178243A (ja) * | 2007-01-19 | 2008-07-31 | Toyota Motor Corp | 磁石温度推定装置、磁石保護装置および磁石温度推定方法、磁石保護方法 |
| US8339082B2 (en) * | 2010-05-21 | 2012-12-25 | GM Global Technology Operations LLC | Methods and systems for induction motor control |
| JP5413424B2 (ja) * | 2011-08-24 | 2014-02-12 | パナソニック株式会社 | モータ駆動装置およびブラシレスモータ |
| JP5811755B2 (ja) | 2011-10-11 | 2015-11-11 | 日産自動車株式会社 | モータ温度検出装置及び駆動力制御装置 |
| JP6065397B2 (ja) * | 2012-03-22 | 2017-01-25 | 三菱自動車工業株式会社 | 電動モータ |
| JP6274886B2 (ja) * | 2014-01-28 | 2018-02-07 | Ntn株式会社 | インホイールモータ駆動装置 |
| US10208649B2 (en) * | 2016-06-24 | 2019-02-19 | Toyota Jidosha Kabushiki Kaisha | Estimator and estimator system |
-
2016
- 2016-03-25 JP JP2016061358A patent/JP6597441B2/ja active Active
-
2017
- 2017-01-30 CN CN201780019702.6A patent/CN108886337B/zh active Active
- 2017-01-30 US US16/087,676 patent/US10601359B2/en active Active
- 2017-01-30 EP EP17769656.4A patent/EP3435541B1/en active Active
- 2017-01-30 WO PCT/JP2017/003117 patent/WO2017163609A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| EP3435541B1 (en) | 2022-10-19 |
| US20190115865A1 (en) | 2019-04-18 |
| EP3435541A1 (en) | 2019-01-30 |
| US10601359B2 (en) | 2020-03-24 |
| WO2017163609A1 (ja) | 2017-09-28 |
| CN108886337B (zh) | 2021-12-14 |
| CN108886337A (zh) | 2018-11-23 |
| JP2017175829A (ja) | 2017-09-28 |
| EP3435541A4 (en) | 2019-08-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10516363B2 (en) | Apparatus for controlling motor | |
| US10351002B2 (en) | Inverter control device and vehicle control device | |
| US7615948B2 (en) | Controller for motor and control method for motor | |
| JP6597441B2 (ja) | モータの制御装置 | |
| JP5200991B2 (ja) | 電動車両のモータ制御方法及びその装置 | |
| JP6079437B2 (ja) | 電動車両の制御方法 | |
| JP4225293B2 (ja) | 車両走行用モータの制御装置 | |
| JP5494159B2 (ja) | 車両駆動システムの暖機制御装置 | |
| JP2013055822A (ja) | 車両 | |
| JP4715675B2 (ja) | 車両およびその車両に搭載されるモータジェネレータのロータに設けられる永久磁石の昇温方法 | |
| JP4380605B2 (ja) | ハイブリッド車両の制御装置 | |
| JP3934130B2 (ja) | ハイブリッド車両のモータ制御装置 | |
| JP2012095390A (ja) | モータ制御システム | |
| JP2009240087A (ja) | 回転電機の制御装置 | |
| JP6907506B2 (ja) | 自動車 | |
| JP2007267514A (ja) | 電動4輪駆動車及び電動4輪駆動車に用いられる電動モータ | |
| JP2016140167A (ja) | 冷却システム | |
| JP5515334B2 (ja) | ハイブリッド車両の制御装置 | |
| JP2008167633A (ja) | 車両およびその制御方法 | |
| JP2011024349A (ja) | 駆動輪に連結された駆動軸に動力を入出力可能な電動機と、電動機を駆動するインバータとを備えた車両 | |
| JP2016208686A (ja) | 電動車両 | |
| WO2023002809A1 (ja) | 制御装置、及びプログラム | |
| JP2006042575A (ja) | 車両用電動機制御装置 | |
| JP5790689B2 (ja) | 電動ポンプの制御装置 | |
| JP2010161929A (ja) | 回転電機の制御システム及び制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20160427 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20160510 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180802 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180802 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190702 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190819 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190903 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190916 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6597441 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |