JP6580098B2 - 吊上げシステム - Google Patents
吊上げシステム Download PDFInfo
- Publication number
- JP6580098B2 JP6580098B2 JP2017171902A JP2017171902A JP6580098B2 JP 6580098 B2 JP6580098 B2 JP 6580098B2 JP 2017171902 A JP2017171902 A JP 2017171902A JP 2017171902 A JP2017171902 A JP 2017171902A JP 6580098 B2 JP6580098 B2 JP 6580098B2
- Authority
- JP
- Japan
- Prior art keywords
- crane
- display
- internal data
- channel
- wireless receiver
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Landscapes
- Selective Calling Equipment (AREA)
Description
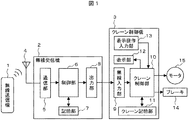
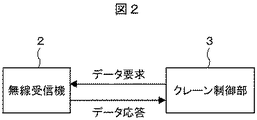
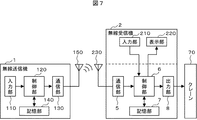
2 無線受信機
3 クレーン制御機
4 受信機用アンテナ
5 通信部
6 制御部
7 記憶部
8 出力部
9 無線入力部
10 クレーン制御部
11 クレーン記憶部
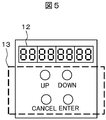
12 表示部
13 表示操作入力部
14 ブレーキ
15 モータ
16 機能コード
17 内部データ表示例
21 送信機A
22 送信機B
23 送信機C
24 受信機A
25 受信機B
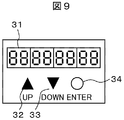
31 7セグメントLED
32 UPボタン
33 DOWNボタン
34 ENTERボタン
41 チャンネルスキャンを実行する機能コード表示
42 全チャンネルのスキャン状態表示
43 チャンネル1の空き状態表示
44 チャンネル2の空き状態表示
51 チャンネル変更を実行する機能コード表示
52 現在選択しているチャンネル表示
53 チャンネル変更状態表示
54 チャンネル1選択状態表示
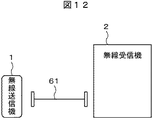
61 設定変更ケーブル
70 クレーン
110 入力部
120 制御部
130 通信部
140 記憶部
150 送信機用アンテナ
230 受信機用アンテナ
210 入力部
220 表示部
Claims (6)
- 操作指示を送信する無線送信機から、少なくともクレーンを動作させるための操作情報を受信する無線受信機と、
前記無線受信機から取得した内部データを表示する表示部と、
前記操作情報に基づいて前記クレーンを動作させるクレーン制御機と、
を有し、
前記クレーン制御機は、前記クレーンの動作を停止させた状態で、前記無線受信機から前記内部データを取得することを特徴とする吊上げシステム。 - 前記表示部は、前記クレーン制御機に設けられていることを特徴とする請求項1に記載の吊上げシステム。
- 前記内部データは、前記無線受信機が検出したエラー情報を含むことを特徴とする請求項1に記載の吊上げシステム。
- 前記クレーン制御機は、前記表示部に表示すべき前記内部データを選択するための表示操作入力部を、さらに有することを特徴とする請求項1に記載の吊上げシステム。
- 前記無線受信機は記憶部を有し、
前記内部データを前記記憶部に記憶することを特徴とする請求項1に記載の吊上げシステム。 - 前記クレーン制御機は、
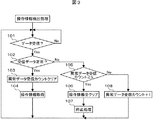
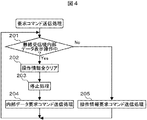
前記表示操作入力部により前記内部データを表示させる操作がされているか判断し、
前記内部データを表示させる操作がされていれば、現在の前記操作情報をクリアするとともに前記クレーンの停止処理を実施し、前記無線受信機へ内部データ要求コマンドを送信し、
前記内部データを表示させる操作がされていなければ、前記無線受信機へ操作情報要求コマンドを送信することを特徴とする請求項4に記載の吊上げシステム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017171902A JP6580098B2 (ja) | 2017-09-07 | 2017-09-07 | 吊上げシステム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017171902A JP6580098B2 (ja) | 2017-09-07 | 2017-09-07 | 吊上げシステム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019043767A JP2019043767A (ja) | 2019-03-22 |
| JP6580098B2 true JP6580098B2 (ja) | 2019-09-25 |
Family
ID=65813704
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017171902A Active JP6580098B2 (ja) | 2017-09-07 | 2017-09-07 | 吊上げシステム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6580098B2 (ja) |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63288893A (ja) * | 1987-05-19 | 1988-11-25 | アンリツ株式会社 | デ−タ伝送装置 |
| JP3245283B2 (ja) * | 1993-11-05 | 2002-01-07 | 鹿島建設株式会社 | 運転状態表示装置を備えたクレーン制御装置 |
| JP4145616B2 (ja) * | 2002-09-30 | 2008-09-03 | 金陵電機株式会社 | 遠隔制御装置 |
| US8554378B2 (en) * | 2011-03-08 | 2013-10-08 | Magnetek, Inc. | System for control of mobile hydraulic equipment |
-
2017
- 2017-09-07 JP JP2017171902A patent/JP6580098B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019043767A (ja) | 2019-03-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5678136B2 (ja) | 照明制御方法及びシステム | |
| EP1498082B1 (en) | Operating system having a plurality of medical devices and a plurality of remote control devices | |
| EP2908302B1 (en) | Operation terminal apparatus for manufacturing apparatus, and manufacturing system including the same | |
| US20180091216A1 (en) | Controller in wireless communication with operation panel, wireless module, and wireless repeater | |
| CN106304537A (zh) | 照明器具以及照明系统 | |
| JP6616364B2 (ja) | 無線装置システム | |
| JP6580098B2 (ja) | 吊上げシステム | |
| JP5333828B2 (ja) | リモコン装置及び機器制御システム | |
| US9544315B2 (en) | Access-level control apparatus | |
| US20100075601A1 (en) | Wireless Communication Apparatus and Wireless Communication Method | |
| EP3280152A1 (en) | Transmission device, receiving device, and communication system and remote operation device provided with same | |
| JP4145616B2 (ja) | 遠隔制御装置 | |
| JP6830208B2 (ja) | 照明システム、照明器具、および、照明システムのペアリング方法 | |
| JP2011143976A (ja) | 部材キッティング指示装置及びこれを用いた部材キッティング指示システム | |
| JP5491710B2 (ja) | DVOR(DopplerVHFOmnidirectionalRadioRange)システム、モニタ装置及びDVOR装置監視方法 | |
| JP7012456B2 (ja) | 照明装置および照明システム | |
| KR101625872B1 (ko) | 스마트단말기의 이벤트 기반의 차량조명 제어시스템 및 그 제어방법, 그리고 이를 위한 컴퓨터로 판독가능한 기록매체 | |
| JP2019011160A (ja) | エレベーター監視システム | |
| JP6808185B2 (ja) | 電磁弁の遠隔操作装置 | |
| JP2010165522A (ja) | 照明システム | |
| EP3396872B1 (en) | State display apparatus, state display system, and radio transmission apparatus | |
| US10266018B2 (en) | Communication system and communication apparatus | |
| KR102259471B1 (ko) | 통신 장치, 무선 통신 장치, 조명 장치, 조명 시스템, 통신 방법, 및 기억 매체에 기억되는 프로그램 | |
| US9923419B2 (en) | Electric power transmitter, electric power transmission method and semiconductor device | |
| TW202347974A (zh) | 發送裝置、發送方法、及接收裝置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180313 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190117 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190122 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190318 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190806 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190827 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6580098 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |