JP6548868B2 - 磁気検査装置、および紙葉類処理装置 - Google Patents
磁気検査装置、および紙葉類処理装置 Download PDFInfo
- Publication number
- JP6548868B2 JP6548868B2 JP2014050581A JP2014050581A JP6548868B2 JP 6548868 B2 JP6548868 B2 JP 6548868B2 JP 2014050581 A JP2014050581 A JP 2014050581A JP 2014050581 A JP2014050581 A JP 2014050581A JP 6548868 B2 JP6548868 B2 JP 6548868B2
- Authority
- JP
- Japan
- Prior art keywords
- magnetic
- unit
- detected
- magnetic field
- medium
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/12—Measuring magnetic properties of articles or specimens of solids or fluids
- G01R33/1253—Measuring galvano-magnetic properties
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/06—Measuring direction or magnitude of magnetic fields or magnetic flux using galvano-magnetic devices
- G01R33/09—Magnetoresistive devices
- G01R33/096—Magnetoresistive devices anisotropic magnetoresistance sensors
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Inspection Of Paper Currency And Valuable Securities (AREA)
- Investigating Or Analyzing Materials By The Use Of Magnetic Means (AREA)
- Measuring Magnetic Variables (AREA)
Description
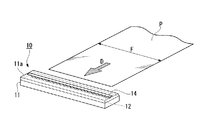
実施形態の磁気センサ10は、図1および図2に示すように、搬送機構1によって搬送される紙葉類Pに設けられている磁気印刷などの磁性体を検出して、紙葉類Pが有する磁気的な特徴情報(例えば、磁気印刷情報など)に応じた信号を出力する。磁気センサ10は、センサ筐体11と、複数の感磁部12と、永久磁石13と、導体14と、複数のローノイズアンプ15と、を備えている。
例えば、磁気抵抗素子の周辺に磁性体が存在しない状態のバイアス磁力線分布に応じて、磁気抵抗素子は抵抗値Raを有している。磁気抵抗素子の周辺に磁性体が接近すると、バイアス磁界のバイアス磁力線が磁性体の移動に伴って曲げられ、磁気抵抗素子に作用するバイアス磁界が変化する。この変化によるバイアス磁力線分布に応じて磁気抵抗素子が抵抗値Rbを有すると、抵抗値の差(=Ra−Rb)が磁性体の接近に伴う抵抗値の変化となる。
導体14は、後述する磁界発生器駆動部21から電流が供給されることによって、図4および図5に示すような所望の磁力線分布を有する磁界M(つまり、電流進行方向に対して右回りの磁界)を発生させる。なお、後述する磁界発生器駆動部21から導体14に供給される電流は、例えば図6に示すようなパルス状の電流波形を有している。
導体14の形状(例えば、搬送方向Dの幅および搬送基準面Sに直交する方向の厚さなど)および導体14の配置位置は、所望の磁力線分布を有する磁界Mが発生するように設定されている。つまり、導体14は、永久磁石13のバイアス磁界MBが発生している状態において、実際に紙葉類Pが搬送基準面Sを移動する際に複数の感磁部12に作用する磁界と同一または近似される磁界を、紙葉類Pが存在しない状態で発生させるように設定されている。例えば図5に示す磁界Mは、少なくとも磁束方向が複数の感磁部12の感磁する方向に一致するように設定されている。
磁気検査装置20は、図7に示すように、磁気センサ10と、磁界発生器駆動部21と、複数の前段アンプ22と、複数の前段マルチプレクサー23と、複数のアンプ24と、複数のアンチエイリアスフィルタ25と、マルチプレクサー26と、ADC27と、ADC制御部28と、検知判定処理部29と、記憶部30と、処理動作制御部31と、タイミング制御部32と、を備えている。
複数の前段マルチプレクサー23は、複数の前段アンプ22の各々に接続されている。複数の前段マルチプレクサー23は、後述するタイミング制御部32から出力される指令信号に応じて、複数の前段アンプ22から出力される電気信号を時系列分割して出力する。つまり、各前段マルチプレクサー23は、複数の前段アンプ22から出力される電気信号のうちから選択する1つの電気信号を時系列的に順次切り替えながら、選択した1つの電気信号を順次出力する。
複数のアンチエイリアスフィルタ25の各々は、複数のアンプ24の各々に接続されている。各アンチエイリアスフィルタ25は、各アンプ24から出力される電気信号にアンチエイリアス処理を行ない、折り返し雑音が減衰した電気信号を出力する。
マルチプレクサー26は、複数のアンチエイリアスフィルタ25に接続されている。マルチプレクサー26は、後述するタイミング制御部32から出力される指令信号に応じて、各アンチエイリアスフィルタ25から出力される電気信号を時系列分割して出力する。
ADC27は、マルチプレクサー26に接続されている。ADC27は、マルチプレクサー26から出力されるアナログの電気信号をデジタル信号に変換して出力する。
ADC制御部28は、後述するタイミング制御部32から出力される指令信号に応じてADC27の動作を制御する。
タイミング制御部32は、磁界発生器駆動部21、複数の前段マルチプレクサー23、マルチプレクサー26、およびADC制御部28などの動作タイミングを指示する指令信号を生成して出力する。
紙葉類処理装置40は、磁気検査装置20と、磁気検査装置20以外の他の複数の検査装置(例えば、3つの異なる検査装置41,42,43など)と、検査装置統合判定処理部51と、処理装置制御部52と、区分制御部53と、を備えている。
検査装置統合判定処理部51は、磁気検査装置20および他の複数の検査装置(例えば、検査装置41,42,43など)から出力される判定結果を統合し、紙葉類Pの廃棄、再流通、および排除などの各区分先を指定する。検査装置統合判定処理部51は、磁気検査装置20および他の複数の検査装置から出力される自己診断の結果を受け取り、各検査装置の異常有無を判定して、この判定結果を処理装置制御部52に出力する。
さらに、実際の紙葉類Pを必要とせずに、任意のタイミングで複数の感磁部12の各々が正常か否かを瞬時に自己診断することができる。
上述した実施形態では、感磁部12は、磁気抵抗素子として、異方性の強磁性体薄膜によるAMR(Anisotropic Magneto Resistance)素子を備えるとしたが、これに限定されない。
上述した実施形態の変形例に係る磁気センサ10は、図8に示すように、磁気抵抗素子として、インジウムアンチモン単結晶(InSb)などの半導体薄膜によるMR(Magneto Resistance)素子を備えてもよい。この変形例の感磁部12は、紙葉類Pの搬送方向Dに平行に配列された2つの磁気抵抗素子R1,R2を備えている。感磁部12は、搬送方向Dに移動する磁性体(つまり紙葉類Pの磁気印刷など)によって永久磁石13のバイアス磁力線が変化した場合、このバイアス磁力線の変化に伴う2つの磁気抵抗素子R1,R2の抵抗値の差分を電気信号として出力する。
検知判定処理部29は、励磁状態の信号のみを用いて補正係数を算出してもよい。
また、検知判定処理部29は、静止状態の信号を用いて補正係数を算出するか否かを、磁気センサ10周辺の磁気環境条件および温度環境条件などに応じて選択してもよい。
例えば、磁気検査装置20は、複数のアンプ24として、増幅率が一定の固定ゲインアンプを用いる代わりに、アナログ的にゲイン調整を行なうPGA(プログラム制御アンプ)などを備え、ハードウェアによって複数の感磁部12の感度のばらつきを補正してもよい。
例えば、各感磁部12が磁気センサ10周辺の環境磁界のゆらぎに影響されない場合には、磁界発生器駆動部21は導体14に定電流を供給してもよい。
磁気センサ10は、他の各種の被検知媒体に対して、実際に被検知媒体を検出する場合の磁力線変動に精度良く近似した磁界を安定に発生させることができる。
さらに、実際の被検知媒体を必要とせずに、任意のタイミングで複数の感磁部12の各々が正常か否かを瞬時に自己診断することができる。
Claims (5)
- 被検知媒体に対向して配置される筐体と、前記筐体の内部に収容される複数の感磁部と、前記筐体の内部において前記複数の感磁部と前記被検知媒体との間に配置される磁気発生部と、を備える磁気センサと、
前記複数の感磁部から出力される信号を用いて前記被検知媒体を検査する検査部と、
前記磁気発生部にパルス状の電流を供給することによって前記磁気発生部から磁界を発生させる通電部と、
前記磁気発生部が発生する磁界に応じて前記複数の感磁部の各々が出力する信号の値を所定の目標値に一致させる補正部と、
を備え、
前記筐体は、前記被検知媒体に対向する部分に、セラミックにより形成されたカバーを備え、
前記磁気発生部は、非磁性の導電部材であり、
前記導電部材は、銅箔であり、
前記磁気発生部は、前記被検知媒体の搬送方向および前記搬送方向に直交する方向において、前記複数の感磁部よりも長く形成され、
前記磁気発生部は、前記被検知媒体から前記複数の感磁部に作用する磁界を、前記被検知媒体が存在しない状態で発生させる、
磁気検査装置。 - 前記筐体の内部に収容されてバイアス磁界を発生する磁石を備え、
前記複数の感磁部の各々は、磁気抵抗素子を備える、
請求項1に記載の磁気検査装置。 - 前記複数の感磁部は、前記被検知媒体に対向して一列に配列されている、
請求項1または請求項2に記載の磁気検査装置。 - 任意のタイミングで前記通電部から前記磁気発生部に電流を供給して、前記複数の感磁部から出力される信号を用いて前記複数の感磁部を診断する診断部を備える、
請求項1から請求項3の何れか1つに記載の磁気検査装置。 - 紙葉類を搬送する搬送部と、
前記筐体が前記紙葉類の搬送基準面に対向して配置された請求項1から請求項4の何れか1つに記載の磁気検査装置と、
少なくとも前記磁気検査装置によって得られる前記紙葉類の検査結果に応じて、前記搬送部により搬送される前記紙葉類を区分処理する区分処理部と、
を備える、
ことを特徴とする紙葉類処理装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014050581A JP6548868B2 (ja) | 2014-03-13 | 2014-03-13 | 磁気検査装置、および紙葉類処理装置 |
| EP15152252.1A EP2927882B1 (en) | 2014-03-13 | 2015-01-23 | Magnetic inspection device and sheet processing apparatus |
| US14/634,112 US9588193B2 (en) | 2014-03-13 | 2015-02-27 | Magnetic sensor, magnetic inspection device, and sheet processing apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014050581A JP6548868B2 (ja) | 2014-03-13 | 2014-03-13 | 磁気検査装置、および紙葉類処理装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015175647A JP2015175647A (ja) | 2015-10-05 |
| JP6548868B2 true JP6548868B2 (ja) | 2019-07-24 |
Family
ID=52358698
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014050581A Active JP6548868B2 (ja) | 2014-03-13 | 2014-03-13 | 磁気検査装置、および紙葉類処理装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9588193B2 (ja) |
| EP (1) | EP2927882B1 (ja) |
| JP (1) | JP6548868B2 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6226629B2 (ja) * | 2013-08-09 | 2017-11-08 | 株式会社東芝 | 磁気検出装置及び紙葉類処理装置 |
| JP6619992B2 (ja) * | 2015-11-13 | 2019-12-11 | グローリー株式会社 | 磁気検出装置 |
| CN105701904B (zh) * | 2015-12-29 | 2018-03-30 | 威海华菱光电股份有限公司 | 磁图像传感器 |
| JP6974897B2 (ja) * | 2016-04-19 | 2021-12-01 | キヤノン電子株式会社 | 磁気識別装置 |
| JP6440904B2 (ja) * | 2016-11-25 | 2018-12-19 | 三菱電機株式会社 | 磁気センサ装置 |
| TWI633319B (zh) * | 2017-02-23 | 2018-08-21 | 愛盛科技股份有限公司 | 磁場感測裝置及感測方法 |
| CN108469595B (zh) * | 2017-02-23 | 2020-08-11 | 爱盛科技股份有限公司 | 磁场感测装置及感测方法 |
| CN112384815A (zh) | 2018-07-08 | 2021-02-19 | 玛特里克细胞研究所株式会社 | 磁体检测装置 |
| JP1636667S (ja) * | 2018-08-21 | 2019-07-22 | ||
| JP2020159846A (ja) * | 2019-03-26 | 2020-10-01 | 株式会社イシダ | 物品移動検知装置および物品移動検知方法 |
| JP2022179065A (ja) * | 2021-05-21 | 2022-12-02 | 富士フイルムビジネスイノベーション株式会社 | シート電気抵抗測定器 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59187865U (ja) * | 1983-05-31 | 1984-12-13 | 京セラ株式会社 | 紙幣検出用ヘツド |
| DE3738455A1 (de) * | 1986-11-25 | 1988-06-01 | Landis & Gyr Ag | Anordnung zum messen eines flussarmen magnetfeldes |
| JPH01261797A (ja) * | 1988-04-13 | 1989-10-18 | Oki Electric Ind Co Ltd | 紙幣鑑別装置の調整用装置 |
| JPH0275087A (ja) * | 1988-09-12 | 1990-03-14 | Fujitsu Ltd | 磁気ラインセンサ |
| JP2550839Y2 (ja) * | 1991-06-14 | 1997-10-15 | 株式会社村田製作所 | 磁気センサ |
| JPH08255276A (ja) * | 1995-03-15 | 1996-10-01 | Toyo Commun Equip Co Ltd | 紙葉類識別装置及びその磁気センサ調整方法 |
| US5616911A (en) * | 1995-05-24 | 1997-04-01 | Eastman Kodak Company | Read-only magnetic security pattern |
| US6822443B1 (en) * | 2000-09-11 | 2004-11-23 | Albany Instruments, Inc. | Sensors and probes for mapping electromagnetic fields |
| WO1998038792A1 (en) * | 1997-02-28 | 1998-09-03 | University And Community College System Of Nevada | Magnetoresistive scanning system |
| US20030164700A1 (en) * | 2001-03-19 | 2003-09-04 | Jentek Sensors, Inc. | High resolution hidden damage imaging |
| DE102005008967A1 (de) * | 2005-02-28 | 2006-08-31 | Giesecke & Devrient Gmbh | Verfahren und Vorrichtung zum Messen magnetischer Eigenschaften von Dokumenten |
| DE102006037226B4 (de) * | 2006-08-09 | 2008-05-29 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Im Messbetrieb kalibrierbarer magnetischer 3D-Punktsensor |
| DE102008000943B4 (de) * | 2008-04-02 | 2015-02-19 | Zf Friedrichshafen Ag | Diagnostizierbarer Hallsensor und Verfahren zur Funktionsdiagnose einer Hall-Sensoreinrichtung |
| GB2481482B (en) * | 2011-04-27 | 2012-06-20 | Univ Manchester | Improvements in sensors |
| CN102540113B (zh) * | 2011-11-11 | 2014-07-02 | 江苏多维科技有限公司 | 磁场传感器 |
-
2014
- 2014-03-13 JP JP2014050581A patent/JP6548868B2/ja active Active
-
2015
- 2015-01-23 EP EP15152252.1A patent/EP2927882B1/en active Active
- 2015-02-27 US US14/634,112 patent/US9588193B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP2927882B1 (en) | 2021-03-03 |
| US20150260805A1 (en) | 2015-09-17 |
| EP2927882A1 (en) | 2015-10-07 |
| JP2015175647A (ja) | 2015-10-05 |
| US9588193B2 (en) | 2017-03-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6548868B2 (ja) | 磁気検査装置、および紙葉類処理装置 | |
| JP5474195B2 (ja) | 磁性体検出装置 | |
| CN110494760B (zh) | 磁传感器 | |
| EP3032252B2 (en) | Magnetic detection device and paper sheet processing device | |
| JP2000055999A (ja) | 磁気センサ装置および電流センサ装置 | |
| JP5500956B2 (ja) | 電流検出装置 | |
| KR20140133876A (ko) | 자기 센서장치 | |
| WO2017082379A1 (ja) | 磁気検出装置 | |
| WO2016170885A1 (ja) | 磁気センサ装置 | |
| JP5799882B2 (ja) | 磁気センサ装置 | |
| JP5881395B2 (ja) | 磁気センサ装置 | |
| JP6454228B2 (ja) | 磁気センサ装置 | |
| JP2010060340A (ja) | 磁気センサ装置 | |
| JP2007033222A (ja) | 電流センサ | |
| JP3192500U (ja) | 電流センサ | |
| JP5861551B2 (ja) | 磁気センサ装置 | |
| JP7286932B2 (ja) | 磁気センサ | |
| WO2021199757A1 (ja) | 磁気センサ装置 | |
| JP2004108955A (ja) | 磁気読取装置 | |
| JP2017003290A (ja) | 磁気センサ装置 | |
| JP6974897B2 (ja) | 磁気識別装置 | |
| JP2019174436A (ja) | 磁気センサ | |
| WO2001033242A1 (en) | A thin magnetoresistive current sensor system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160912 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170523 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170524 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170721 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20170911 Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20170911 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171010 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171211 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180605 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180806 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190115 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190415 |
|
| A911 | Transfer of reconsideration by examiner before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20190423 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190528 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190626 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6548868 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |