JP6525499B2 - 同軸駆動真空ロボット - Google Patents
同軸駆動真空ロボット Download PDFInfo
- Publication number
- JP6525499B2 JP6525499B2 JP2013533015A JP2013533015A JP6525499B2 JP 6525499 B2 JP6525499 B2 JP 6525499B2 JP 2013533015 A JP2013533015 A JP 2013533015A JP 2013533015 A JP2013533015 A JP 2013533015A JP 6525499 B2 JP6525499 B2 JP 6525499B2
- Authority
- JP
- Japan
- Prior art keywords
- drive
- substrate
- arm
- motor
- transport
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000000758 substrate Substances 0.000 claims description 209
- 239000012636 effector Substances 0.000 claims description 60
- 238000007789 sealing Methods 0.000 claims description 20
- 230000004888 barrier function Effects 0.000 claims description 18
- 230000007246 mechanism Effects 0.000 claims description 17
- 238000002955 isolation Methods 0.000 claims description 16
- 230000003068 static effect Effects 0.000 claims description 16
- 230000032258 transport Effects 0.000 description 90
- 238000012546 transfer Methods 0.000 description 61
- 238000012545 processing Methods 0.000 description 49
- 239000011553 magnetic fluid Substances 0.000 description 34
- 230000033001 locomotion Effects 0.000 description 29
- 230000020347 spindle assembly Effects 0.000 description 16
- 230000008878 coupling Effects 0.000 description 15
- 238000010168 coupling process Methods 0.000 description 15
- 238000005859 coupling reaction Methods 0.000 description 15
- 238000000034 method Methods 0.000 description 10
- 238000010586 diagram Methods 0.000 description 9
- 210000000245 forearm Anatomy 0.000 description 8
- 230000007613 environmental effect Effects 0.000 description 7
- 238000006243 chemical reaction Methods 0.000 description 6
- 125000006850 spacer group Chemical group 0.000 description 6
- 238000004320 controlled atmosphere Methods 0.000 description 4
- 239000000463 material Substances 0.000 description 4
- 230000008569 process Effects 0.000 description 3
- 230000000712 assembly Effects 0.000 description 2
- 238000000429 assembly Methods 0.000 description 2
- 230000009977 dual effect Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000006698 induction Effects 0.000 description 2
- 230000003993 interaction Effects 0.000 description 2
- 230000009191 jumping Effects 0.000 description 2
- 239000004973 liquid crystal related substance Substances 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 210000000707 wrist Anatomy 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 239000000969 carrier Substances 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000007812 deficiency Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 230000008021 deposition Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000005489 elastic deformation Effects 0.000 description 1
- 238000005530 etching Methods 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 239000011261 inert gas Substances 0.000 description 1
- 238000005468 ion implantation Methods 0.000 description 1
- 230000014759 maintenance of location Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000005498 polishing Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 238000005303 weighing Methods 0.000 description 1
Images







































Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/02—Programme-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type
- B25J9/04—Programme-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type by rotating at least one arm, excluding the head movement itself, e.g. cylindrical coordinate type or polar coordinate type
- B25J9/041—Cylindrical coordinate type
- B25J9/042—Cylindrical coordinate type comprising an articulated arm
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
- B25J11/0095—Manipulators transporting wafers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67739—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber
- H01L21/67742—Mechanical parts of transfer devices
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67763—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H01L21/67766—Mechanical parts of transfer devices
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Mechanical Engineering (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Manipulator (AREA)
Description
また、大容量ペイロードを搬送するためのロボットアクチュエータは、一般的に、アームを駆動するためのギア減速メカニズムを用いてロボットアームに結合された従来の駆動モータで駆動される。
開示される発明の第一の実施形態に従って、大気隔離シールは磁性流体シールである。
開示される発明の第一の実施形態に従って、少なくとも一つのハーモニックモータ組立部品の出力部分は、ハーモニックモータ組立部品の入力部分から密閉されて隔離されている。
開示される発明の第一の実施形態に従って、ロボットアームは、スライド式のエンドエフェクタ配列を有する。
開示される発明の第一の実施形態に従って、駆動システムは、Z軸駆動モータを含む。
開示される発明の第一の実施形態に従って、ロボット式搬送装置は、約1〜20キログラムのペイロード、約15〜20キログラムのペイロード、約15キログラムのペイロード、または約20キログラムのペイロードを運搬するように構成されている。
開示される発明の第二の実施形態に従って、少なくとも一つの直線状にスライドする搬送アームは、互いに積み重ねられた少なくとも二つのエンドエフェクタと、それぞれのエンドエフェクタが、少なくとも二つのエンドエフェクタの他方とは独立してスライドして取り付けられる基板部材とを含む。
開示される発明の第二の実施形態に従って、ロボット式搬送装置はさらにZ軸駆動モータを含む。
開示される発明の第三の実施形態に従って、少なくとも一つの基板ホルダは、積み重ねられた構造に配置された少なくとも二つの基板ホルダを有する。
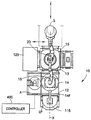
真空ロボットアーム130は、セクション110の中央室175に取り付けられる。制御部170は、隙間180及び185を回転するように動作し、処理モジュール125、ロードロック135、及びロードロック140間で基板を搬送するための、真空ロボットアーム130の動作を調整する。真空ロボットアーム130は、駆動セクション190(下記に詳細が記載される)及び一つ以上のエンドエフェクタ195を含む。
15:搬送部
20:搬送ロボット
100:基板処理装置
110:密閉セクション
130:真空ロボットアーム
150:搬送部
155:アーム
165:エンドエフェクタ
170:制御部
190:駆動セクション
195:エンドエフェクタ
208、209:ハーモニック駆動モータ
208R:回転子
208S:固定子
210:Z軸モータ
211:外部軸
212:内部軸
500:磁性流体シール
708、709、710:ハーモニックモータ
708R、709R、710R:回転子
708S、709S、710S:固定子
711:外部軸
712:駆動軸、内部軸
713:中間軸
800:搬送部、アーム
830:エンドエフェクタ
840:駆動セクション、駆動システム、駆動部
840H:筐体
1700:基板搬送装置
1710:アーム組立部品
1720:駆動セクション
1800:駆動部
1800S:スピンドル組立部品
1823:Z軸駆動部
1900:アーム
1900:筐体
1905:エンドエフェクタ
1960:基板部材
2010:搬送部材
2100:大容量搬送装置
2600:シール
2710:アーム
2720:駆動システム
2823:Z軸駆動部
2900:筐体
2905:エンドエフェクタ
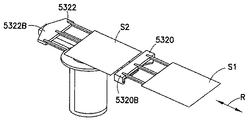
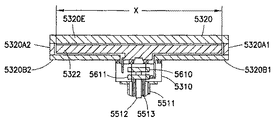
5300:搬送部
5300A:アームセクション、アーム組立部品
5300D:駆動セクション
5310:基板部材
5320、5322:基板ホルダ
5323:支持体
5371:同軸駆動軸組立部品
5511、5512、5513:駆動軸
5560M、5561M、5562M:回転子
5560S、5561S、5562S:固定子
5599:回転軸
5920:搬送部
Claims (5)
- 同軸駆動スピンドル機構及び少なくとも一つのハーモニックモータ組立部品を含み、前記同軸駆動スピンドル機構が少なくとも二つの駆動軸を含み、前記少なくとも一つのハーモニックモータ組立部品が少なくとも二つの駆動軸と対応する複数のモータ回転子及び複数のモータ固定子を含む駆動システムと、
前記同軸駆動スピンドル機構に取り付けられた少なくとも一つの直線状にスライドする搬送アームと、を含むロボット式搬送装置において、
前記少なくとも一つのハーモニックモータ組立部品は、前記同軸駆動スピンドル機構を通して前記少なくとも一つの搬送アームに結合され、前記搬送アームを移動させるために前記同軸駆動スピンドル機構の少なくとも二つの駆動軸を実質的に直接駆動するように構成されており、
前記同軸駆動スピンドル機構は密閉環境の中にあり、前記複数のモータ固定子は前記密閉環境の外に隔離され、前記同軸駆動スピンドル機構を前記密閉環境内に密閉するすべてのシールは静的シールであり、前記静的シールのすべてによって前記密閉環境の密閉をもたらす各密閉接合部位が静的接合部位であるように構成されている、ロボット式搬送装置。 - 前記少なくとも一つの直線状にスライドする搬送アームは、直線状にスライドするエンドエフェクタ配列を有する、請求項1に記載のロボット式搬送装置。
- 前記少なくとも一つの直線状にスライドする搬送アームは、互いに積み重ねられた少なくとも二つのエンドエフェクタと、それぞれのエンドエフェクタが、少なくとも二つのエンドエフェクタの他方とは独立してスライドして取り付けられる基板部材と、を含む、請求項1に記載のロボット式搬送装置。
- 前記ロボット式搬送装置はさらにZ軸駆動モータを含む、請求項1に記載のロボット式搬送装置。
- 前記駆動システムは、前記密閉環境を保持する内部を有する筐体、駆動軸に対応した前記モータ固定子及び前記モータ回転子、並びに、少なくとも一つの静的隔離バリアを形成する前記静的シールを含み、前記モータ固定子は前記筐体の前記内部の外側の前記筐体内に配置され、前記モータ回転子は前記内部に配置され、前記少なくとも一つの静的隔離バリアは前記内部を閉じる前記筐体内に配置されることで、前記少なくとも一つの静的隔離バリアは、前記モータ固定子は、前記筐体の前記内部で前記密閉環境の外側に配置され、前記筐体の前記内部が前記密閉環境に開かれているように、前記モータ固定子を前記筐体の前記内側で前記密閉環境から遮断するように構成されている、請求項1に記載のロボット式搬送装置。
Applications Claiming Priority (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US39138010P | 2010-10-08 | 2010-10-08 | |
| US61/391,380 | 2010-10-08 | ||
| US201161490864P | 2011-05-27 | 2011-05-27 | |
| US61/490,864 | 2011-05-27 | ||
| US13/270,844 | 2011-10-11 | ||
| PCT/US2011/055825 WO2012048346A1 (en) | 2010-10-08 | 2011-10-11 | Coaxial drive vacuum robot |
| US13/270,844 US9656386B2 (en) | 2010-10-08 | 2011-10-11 | Coaxial drive vacuum robot |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016254043A Division JP6603204B2 (ja) | 2010-10-08 | 2016-12-27 | 同軸駆動真空ロボット |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013540361A JP2013540361A (ja) | 2013-10-31 |
| JP2013540361A5 JP2013540361A5 (ja) | 2018-12-27 |
| JP6525499B2 true JP6525499B2 (ja) | 2019-06-05 |
Family
ID=44860547
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013533015A Active JP6525499B2 (ja) | 2010-10-08 | 2011-10-11 | 同軸駆動真空ロボット |
| JP2016254043A Active JP6603204B2 (ja) | 2010-10-08 | 2016-12-27 | 同軸駆動真空ロボット |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016254043A Active JP6603204B2 (ja) | 2010-10-08 | 2016-12-27 | 同軸駆動真空ロボット |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9656386B2 (ja) |
| JP (2) | JP6525499B2 (ja) |
| KR (1) | KR101917335B1 (ja) |
| CN (1) | CN103237634B (ja) |
| WO (1) | WO2012048346A1 (ja) |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5465979B2 (ja) * | 2009-10-26 | 2014-04-09 | 東京エレクトロン株式会社 | 半導体製造装置 |
| US9186799B2 (en) * | 2011-07-13 | 2015-11-17 | Brooks Automation, Inc. | Compact direct drive spindle |
| CN104302807B (zh) * | 2012-05-18 | 2017-04-05 | 维易科精密仪器国际贸易(上海)有限公司 | 用于化学气相沉积的具有铁磁流体密封件的转盘反应器 |
| US10134621B2 (en) * | 2013-12-17 | 2018-11-20 | Brooks Automation, Inc. | Substrate transport apparatus |
| WO2015109189A1 (en) * | 2014-01-17 | 2015-07-23 | Brooks Automation, Inc. | Substrate transport apparatus |
| KR102402324B1 (ko) | 2014-01-28 | 2022-05-26 | 브룩스 오토메이션 인코퍼레이티드 | 기판 이송 장치 |
| JP6276090B2 (ja) * | 2014-03-31 | 2018-02-07 | 株式会社ダイヘン | 搬送装置、搬送システム |
| KR101579859B1 (ko) | 2014-04-29 | 2015-12-23 | (주)아셈스 | 환편으로 직조된 접착성 원단을 이용한 입체 문양 형성방법 |
| CN104827475B (zh) * | 2015-04-10 | 2016-07-06 | 嘉兴川页奇精密自动化机电有限公司 | 一种持续旋转式机械手 |
| JP6918770B2 (ja) * | 2015-07-13 | 2021-08-11 | ブルックス オートメーション インコーポレイテッド | オンザフライ方式の自動ウェハセンタリング方法および装置 |
| US10748799B2 (en) * | 2015-07-13 | 2020-08-18 | Brooks Automation, Inc. | Substrate transport apparatus with interchangeable motor modules |
| JP6581831B2 (ja) * | 2015-07-28 | 2019-09-25 | 東京エレクトロン株式会社 | 保持部の姿勢維持機構 |
| DE202016005868U1 (de) * | 2016-09-23 | 2016-11-11 | Kuka Roboter Gmbh | Manipulatorsystem mit Mitteln zur Erzeugung eines Luftstroms |
| DE102016118462A1 (de) | 2016-09-29 | 2018-03-29 | Asys Automatic Systems Gmbh & Co. Kg | Handhabungsvorrichtung für Substrate, insbesondere Halbleitersubstrate |
| US10903107B2 (en) * | 2017-07-11 | 2021-01-26 | Brooks Automation, Inc. | Semiconductor process transport apparatus comprising an adapter pendant |
| TWI758595B (zh) | 2018-03-31 | 2022-03-21 | 日商平田機工股份有限公司 | 腔室構造 |
| US11545380B2 (en) * | 2018-11-01 | 2023-01-03 | Brooks Automation Us Llc | Transport apparatus with linear bearing |
| CN110834323A (zh) * | 2019-10-18 | 2020-02-25 | 广东天机机器人有限公司 | 水平多关节机器人 |
| KR102552870B1 (ko) * | 2021-10-29 | 2023-07-10 | 주식회사 라온테크 | 직접구동 모터 기반의 웨이퍼 이송 로봇 장치 |
| CN118306582B (zh) * | 2023-01-09 | 2024-09-20 | 中国科学院空间应用工程与技术中心 | 一种载荷照料装置 |
| CN117080138B (zh) * | 2023-10-12 | 2023-12-15 | 深圳市曜通科技有限公司 | 一种半导体封装载料装置 |
Family Cites Families (51)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4666366A (en) | 1983-02-14 | 1987-05-19 | Canon Kabushiki Kaisha | Articulated arm transfer device |
| US4909701A (en) | 1983-02-14 | 1990-03-20 | Brooks Automation Inc. | Articulated arm transfer device |
| DE3465405D1 (en) | 1983-02-14 | 1987-09-17 | Aeronca Electronics Inc | Articulated arm transfer device |
| JPH03154791A (ja) | 1989-11-14 | 1991-07-02 | Sumitomo Eaton Noba Kk | ロボット用多関節アーム |
| JP2654217B2 (ja) | 1990-01-31 | 1997-09-17 | 山形日本電気株式会社 | ウェーハ移載方法 |
| JP3196218B2 (ja) * | 1991-01-10 | 2001-08-06 | ソニー株式会社 | ウエハ搬送装置とウエハ搬送方法 |
| US5180276A (en) | 1991-04-18 | 1993-01-19 | Brooks Automation, Inc. | Articulated arm transfer device |
| JPH05109866A (ja) * | 1991-10-16 | 1993-04-30 | Nec Corp | ウエハ移載ロボツト |
| US5229615A (en) * | 1992-03-05 | 1993-07-20 | Eaton Corporation | End station for a parallel beam ion implanter |
| JPH06109866A (ja) | 1992-09-25 | 1994-04-22 | Seiko Epson Corp | 時計用カバーガラスおよびその製造方法 |
| US5431529A (en) | 1992-12-28 | 1995-07-11 | Brooks Automation, Inc. | Articulated arm transfer device |
| DE69415517T3 (de) | 1993-04-16 | 2005-03-17 | Brooks Automation, Inc., Lowell | Handhabungseinrichtung mit gelenkarm |
| US5676472A (en) | 1995-07-10 | 1997-10-14 | Smart Machines | Rotary labyrinth seal |
| US5794487A (en) | 1995-07-10 | 1998-08-18 | Smart Machines | Drive system for a robotic arm |
| US6428266B1 (en) | 1995-07-10 | 2002-08-06 | Brooks Automation, Inc. | Direct driven robot |
| US5647724A (en) | 1995-10-27 | 1997-07-15 | Brooks Automation Inc. | Substrate transport apparatus with dual substrate holders |
| JPH09267280A (ja) * | 1996-02-02 | 1997-10-14 | Komatsu Ltd | ハンドリング用ロボット |
| TW349897B (en) | 1996-02-02 | 1999-01-11 | Komatsu Mfg Co Ltd | Operational robot |
| JP3954686B2 (ja) | 1997-03-24 | 2007-08-08 | 平田機工株式会社 | 基板の搬送装置及び基板の搬送方法 |
| JPH1138909A (ja) * | 1997-07-18 | 1999-02-12 | Toa Resin Kk | 看 板 |
| JPH11163076A (ja) * | 1997-12-02 | 1999-06-18 | Hitachi Ltd | 搬送装置 |
| JPH11166597A (ja) * | 1997-12-02 | 1999-06-22 | Harmonic Drive Syst Ind Co Ltd | 回転導入機 |
| JPH11176904A (ja) * | 1997-12-12 | 1999-07-02 | Toray Ind Inc | 薄板状ワーク搬送用ハンド |
| JPH11188671A (ja) * | 1997-12-26 | 1999-07-13 | Daihen Corp | 2アーム方式の搬送用ロボット装置 |
| JPH11307609A (ja) * | 1998-04-21 | 1999-11-05 | Toyota Autom Loom Works Ltd | 搬送用アームロボットのアーム駆動装置 |
| KR20000042618A (ko) | 1998-12-26 | 2000-07-15 | 윤종용 | 원통좌표계로봇 |
| US6634851B1 (en) | 1999-01-15 | 2003-10-21 | Asyst Technologies, Inc. | Workpiece handling robot |
| KR100551806B1 (ko) * | 1999-09-06 | 2006-02-13 | 동경 엘렉트론 주식회사 | 반도체 처리용 반송 장치 및 수용 장치와, 반도체 처리시스템 |
| JP4607301B2 (ja) * | 1999-09-06 | 2011-01-05 | 東京エレクトロン株式会社 | 半導体処理用の搬送装置及び半導体処理システム |
| US6265803B1 (en) | 1999-11-10 | 2001-07-24 | Brooks Automation, Inc. | Unlimited rotation vacuum isolation wire feedthrough |
| US6395648B1 (en) * | 2000-02-25 | 2002-05-28 | Wafermasters, Inc. | Wafer processing system |
| US6845250B1 (en) | 2000-10-13 | 2005-01-18 | Cisco Technology, Inc. | Method and system for transmitting messages in a communications network |
| JP3801059B2 (ja) * | 2002-01-31 | 2006-07-26 | 株式会社デンソーウェーブ | ロボットの関節部構造 |
| US6779962B2 (en) | 2002-03-22 | 2004-08-24 | Brooks Automation, Inc. | Device for handling flat panels in a vacuum |
| US7578649B2 (en) | 2002-05-29 | 2009-08-25 | Brooks Automation, Inc. | Dual arm substrate transport apparatus |
| JP4207530B2 (ja) * | 2002-10-28 | 2009-01-14 | 東京エレクトロン株式会社 | 被処理体の搬送機構 |
| JP4302575B2 (ja) | 2003-05-30 | 2009-07-29 | 東京エレクトロン株式会社 | 基板搬送装置および真空処理装置 |
| CN1902031A (zh) * | 2003-11-10 | 2007-01-24 | 布卢希弗特科技公司 | 用于处理基于真空的半导体处理系统中的工件的方法和系统 |
| US20050111956A1 (en) * | 2003-11-10 | 2005-05-26 | Blueshift Technologies, Inc. | Methods and systems for reducing the effect of vibration in a vacuum-based semiconductor handling system |
| US8376685B2 (en) | 2004-06-09 | 2013-02-19 | Brooks Automation, Inc. | Dual scara arm |
| JP2007216364A (ja) * | 2006-02-20 | 2007-08-30 | Aitec Corp | 真空用ロボット |
| TW200732011A (en) | 2006-02-20 | 2007-09-01 | Chiung-Nien Chen | Orientation system for focal point position of non-invasive therapeutical ultrasonic |
| JP4848845B2 (ja) | 2006-06-01 | 2011-12-28 | 株式会社安川電機 | 真空ロボット、処理装置、モータの製造方法、およびモータ |
| CN200970769Y (zh) * | 2006-11-10 | 2007-11-07 | 沈阳新松机器人自动化股份有限公司 | 平面多关节机器人 |
| JP2008135630A (ja) * | 2006-11-29 | 2008-06-12 | Jel:Kk | 基板搬送装置 |
| JP4950745B2 (ja) * | 2007-04-19 | 2012-06-13 | 株式会社ダイヘン | 搬送装置 |
| JP4955447B2 (ja) | 2007-04-26 | 2012-06-20 | 株式会社ダイヘン | 搬送装置 |
| US8275681B2 (en) | 2007-06-12 | 2012-09-25 | Media Forum, Inc. | Desktop extension for readily-sharable and accessible media playlist and media |
| CN100563949C (zh) * | 2007-08-29 | 2009-12-02 | 哈尔滨工业大学 | 空间机械臂模块化关节 |
| US8528438B2 (en) * | 2009-11-25 | 2013-09-10 | Chung-Shan Institute Of Science And Technology, Armaments Bureau, Ministry Of National Defense | Robotic arm for transporting substrate in ultrahigh vacuum |
| JP6109866B2 (ja) | 2015-03-02 | 2017-04-05 | 株式会社京三製作所 | 転落防止装置 |
-
2011
- 2011-10-11 CN CN201180059144.9A patent/CN103237634B/zh active Active
- 2011-10-11 JP JP2013533015A patent/JP6525499B2/ja active Active
- 2011-10-11 KR KR1020137011934A patent/KR101917335B1/ko active IP Right Grant
- 2011-10-11 US US13/270,844 patent/US9656386B2/en active Active
- 2011-10-11 WO PCT/US2011/055825 patent/WO2012048346A1/en active Application Filing
-
2016
- 2016-12-27 JP JP2016254043A patent/JP6603204B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017123461A (ja) | 2017-07-13 |
| JP6603204B2 (ja) | 2019-11-06 |
| KR101917335B1 (ko) | 2018-11-09 |
| JP2013540361A (ja) | 2013-10-31 |
| US9656386B2 (en) | 2017-05-23 |
| WO2012048346A1 (en) | 2012-04-12 |
| US20120128450A1 (en) | 2012-05-24 |
| CN103237634A (zh) | 2013-08-07 |
| CN103237634B (zh) | 2016-12-14 |
| KR20140018844A (ko) | 2014-02-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6525499B2 (ja) | 同軸駆動真空ロボット | |
| JP6581072B2 (ja) | 双腕ロボット | |
| JP6594304B2 (ja) | 処理装置 | |
| US8680803B2 (en) | Substrate processing apparatus with motors integral to chamber walls | |
| US7946800B2 (en) | Substrate transport apparatus with multiple independently movable articulated arms | |
| TWI603905B (zh) | 在電子裝置製造中經調適以傳送雙基材的機器人系統、設備和方法 | |
| US9202733B2 (en) | Robot system with independent arms | |
| US9245783B2 (en) | Vacuum robot with linear translation carriage | |
| JP2019036738A (ja) | 独立して回転可能なウェストを有するロボットシステム、装置、および方法 | |
| US20220266460A1 (en) | Substrate transport apparatus | |
| TWI586500B (zh) | 機器人運送裝置及基板處理裝置 | |
| TWI657524B (zh) | 基板搬運設備 | |
| TWI737622B (zh) | 基板運輸裝置 | |
| CN119050029A (zh) | 晶圆传输装置及半导体设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20141003 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150821 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150901 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20151127 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20151203 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160301 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20160830 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161227 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20170124 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20170317 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20180802 |
|
| A524 | Written submission of copy of amendment under article 19 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A524 Effective date: 20181115 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20181116 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20181116 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190507 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6525499 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |