JP6519262B2 - 立体物検出装置、立体物検出方法、立体物検出プログラム、及び移動体機器制御システム - Google Patents
立体物検出装置、立体物検出方法、立体物検出プログラム、及び移動体機器制御システム Download PDFInfo
- Publication number
- JP6519262B2 JP6519262B2 JP2015062340A JP2015062340A JP6519262B2 JP 6519262 B2 JP6519262 B2 JP 6519262B2 JP 2015062340 A JP2015062340 A JP 2015062340A JP 2015062340 A JP2015062340 A JP 2015062340A JP 6519262 B2 JP6519262 B2 JP 6519262B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- parallax
- road surface
- dimensional object
- map
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


























Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T11/00—Two-dimensional [2D] image generation
- G06T11/20—Drawing from basic elements
- G06T11/26—Drawing of charts or graphs
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/204—Image signal generators using stereoscopic image cameras
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10004—Still image; Photographic image
- G06T2207/10012—Stereo images
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10016—Video; Image sequence
- G06T2207/10021—Stereoscopic video; Stereoscopic image sequence
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
- G06T2207/30252—Vehicle exterior; Vicinity of vehicle
- G06T2207/30256—Lane; Road marking
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
- G06T2207/30252—Vehicle exterior; Vicinity of vehicle
- G06T2207/30261—Obstacle
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/204—Image signal generators using stereoscopic image cameras
- H04N13/239—Image signal generators using stereoscopic image cameras using two two-dimensional [2D] image sensors having a relative position equal to or related to the interocular distance
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N2013/0074—Stereoscopic image analysis
- H04N2013/0081—Depth or disparity estimation from stereoscopic image signals
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Multimedia (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Signal Processing (AREA)
- Image Analysis (AREA)
- Image Processing (AREA)
- Traffic Control Systems (AREA)
- Measurement Of Optical Distance (AREA)
- Fittings On The Vehicle Exterior For Carrying Loads, And Devices For Holding Or Mounting Articles (AREA)
- Studio Devices (AREA)
- Mechanical Engineering (AREA)
Description
前記視差画像に基づいて、前記移動方向に対する横方向の距離と前記移動方向の距離とを関連付けた視差値の頻度分布を表すマップを生成するマップ生成手段と、前記頻度分布に基づいて孤立領域を検出する孤立領域検出手段と、前記孤立領域内の前記頻度分布に基づいて、前記孤立領域を分割する孤立領域分割手段と、前記分割された孤立領域に基づいて立体物を検出する立体物検出手段と、を有する立体物検出装置である。
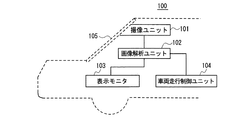
図1は、本発明の実施形態に係る移動体機器制御システムとしての車載機器制御システムの概略構成を示す模式図である。
この車載機器制御システムは、移動体である自動車などの自車両100に搭載されており、撮像ユニット101、画像解析ユニット102、表示モニタ103、及び車両走行制御ユニット104からなる。そして、撮像ユニット101で撮像した自車両の進行方向(移動方向)の前方領域(撮像領域)の撮像画像データから、自車両前方の路面(移動面)の相対的な高さ情報(相対的な傾斜状況を示す情報)を検知し、その検知結果から、自車両前方の走行路面の3次元形状を検出し、その検出結果を利用して各種車載機器の制御を行う。
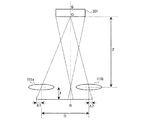
図2は、図1における撮像ユニット101及び画像解析ユニット102の概略構成を示す模式図である。
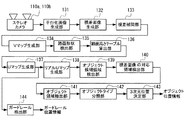
図4は、図2における処理ハードウェア部120及び画像解析ユニット102で実現される物体検出処理について説明するための機能ブロック図である。以下、本実施形態における物体検出処理について説明する。
Y=0.3R+0.59G+0.11B …式〔1〕
輝度画像データに対して、まず、平行化画像生成部131で平行化画像生成処理が実行される。この平行化画像生成処理は、撮像部110a,110bにおける光学系の歪みや左右の撮像部110a,110bの相対的な位置関係から、各撮像部110a,110bから出力される輝度画像データ(基準画像と比較画像)を、2つのピンホールカメラが平行に取り付けられたときに得られる理想的な平行化ステレオ画像となるように変換する。これは、各画素での歪み量を、Δx=f(x,y)、Δy=g(x,y)という多項式を用いて計算し、その計算結果を用いて、各撮像部110a,110bから出力される輝度画像データ(基準画像と比較画像)の各画素を変換する。多項式は、例えば、x(画像の横方向位置)、y(画像の縦方向位置)に関する5次多項式に基づく。
このようにして平行化画像処理を行った後、次に、視差演算部121(図2)によって構成される視差画像生成部132において、視差画像データ(視差画像情報)を生成する視差画像生成処理を行う。視差画像生成処理では、まず、2つの撮像部110a,110bのうちの一方の撮像部110aの輝度画像データを基準画像データとし、他方の撮像部110bの輝度画像データを比較画像データとし、これらを用いて両者の視差を演算して、視差画像データを生成して出力する。この視差画像データは、基準画像データ上の各画像部分について算出される視差値dに応じた画素値をそれぞれの画像部分の画素値として表した視差画像を示すものである。
て定義したブロックの画素値の特徴を示す特徴量と比較画像データにおける各ブロックの画素値の特徴を示す特徴量との相関を示す相関値を、それぞれ算出する。そして、算出した相関値に基づき、比較画像データにおける各ブロックの中で最も基準画像データのブロックと相関があった比較画像データのブロックを選定するマッチング処理を行う。その後、基準画像データのブロックの注目画素と、マッチング処理で選定された比較画像データのブロックの対応画素との位置ズレ量を視差値dとして算出する。このような視差値dを算出する処理を基準画像データの全域又は特定の一領域について行うことで、視差画像データを得ることができる。
視差画像生成処理を行ったら、次に画像解析ユニット102によって構成される視差補間部133において、視差画像補間処理を行い、補間視差画像を生成する。図5は、視差画像補間処理の概要について説明するための図である。ここで、図5Aは撮像画像、図5Bは視差画像である。また、図5C〜Eは、視差画像補間処理を実行する条件を説明するための図である。
視差値D1に対応する距離をZ1、画素P1、P2間の画像上の距離をPXとすると、2点間の近似的な実距離RZは、ステレオカメラの焦点距離をfとすると、「RZ=Z1/f*PX」で算出することができる。RZが所定の値(乗用車1台に相当する幅:1900mm)以内であれば、この条件は満たされる。
即ち、図5Cにおける画素P1と画像P2を結ぶライン321上の画素に視差値が存在しない。
即ち、図5Dに示すように、例えば2点から1.5m以内の高さの領域322に水平エッジが所定数以上存在するか否かを判定する。高さ1.5mに相当する画素数PZは、画素P1の視差値D1から算出される距離Z1とステレオカメラの焦点距離fから、「PZ=1.5m*f/Z1」の式により算出することができる。
想定するシーンは車両の屋根323である。水平エッジが連続している場合、画素P1、P2の視差値D1、D2の差が所定値以下であれば補間する。
遠方の視差情報とは、視差値D1、D2から得られる距離Z1、Z2の大きい方の値の20%以上遠方の距離に対応する視差値である。
第5判定条件が偽となる場合とは、補間しようとするラインの近傍に遠方視差が存在する場合、即ち、遠方の物体が見えている場合である。その場合は、視差補間をしないことになる。
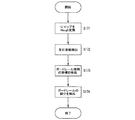
次に視差補間処理について詳細に説明する。
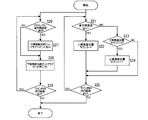
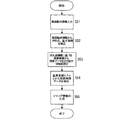
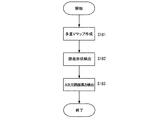
図6は、視差画像補間処理の全体の流れを示すフローチャートである。
まず、第4判定条件用ラインバッファ(エッジ位置カウント)、及び第5判定条件用ラインバッファ(上側視差位置カウント、下側視差位置ビットフラグ)を初期化する(ステップS1)。
図5Bにおける2点(画素P1、P2)の視差値を補間しようとすると、下記(イ)〜(ニ)の4つの判断ステップが必要となる。
(イ)2点の視差値が近いか否かを判断する。
(ロ)2点の上側1.5m以内に水平エッジがあるか否かを判断する。
(ハ)水平エッジの下側に遠方視差値があるか否かを判断する。
(ニ)2点の下側に遠方視差値があるか否かを判断する。
このようにして視差画像補間処理を行ったら、次にVマップ生成部134において、Vマップを生成するVマップ生成処理を実行する。視差画像データに含まれる各視差画素データは、x方向位置とy方向位置と視差値dとの組(x,y,d)で示される。これを、X軸にd、Y軸にy、Z軸に頻度fを設定した三次元座標情報(d,y,f)に変換したもの、又はこの三次元座標情報(d,y,f)から所定の頻度閾値を超える情報に限定した三次元座標情報(d,y,f)を、視差ヒストグラム情報として生成する。本実施形態の視差ヒストグラム情報は、三次元座標情報(d,y,f)からなり、この三次元ヒストグラム情報をX−Yの2次元座標系に分布させたものを、Vマップ(視差ヒストグラムマップ)と呼ぶ。
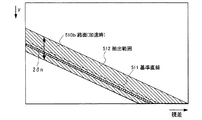
本実施形態における抽出条件は、自車両の前方路面が自車両の真下の路面部分510と平行な面を自車両前方へ延長して得られる仮想の基準路面(仮想基準移動面)に対応する視差値dと画像上下方向位置yとの関係を基準として定まる所定の抽出範囲2δn内に属するという条件である。この基準路面に対応する視差値dと画像上下方向位置yとの関係は、図11に示すように、Vマップ上において直線(以下「基準直線」という。)511で示される。本実施形態では、この基準直線511を中心に画像上下方向へ±δの範囲を、抽出範囲512として規定している。この抽出範囲512は、状況に応じて刻々と変化する実際の路面のVマップ要素(d,y,f)の変動範囲を含むように設定される。
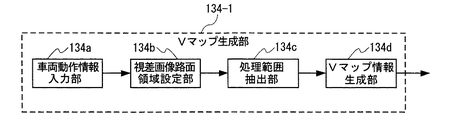
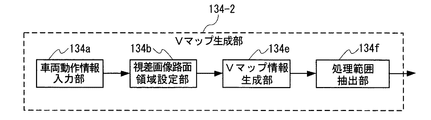
図14は、図4におけるVマップ生成部の内部構成の一例を示す処理ブロック図である。このVマップ生成部134−1は、車両動作情報入力部134a、視差画像路面領域設定部134b、処理範囲抽出部134c、及びVマップ情報生成部134dからなる。
〔第1の処理例〕
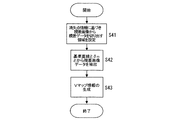
図16は、本実施形態におけるVマップ情報生成処理の第1の処理例の流れを示すフローチャートである。また、図17は、視差画像に設定される路面画像候補領域について説明するための図である。
図18は、本実施形態におけるVマップ情報生成処理の第2の処理例の流れを示すフローチャートである。
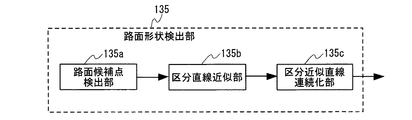
次に、路面形状検出部135で行う処理について説明する。
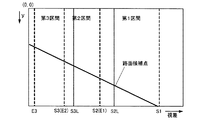
路面形状検出部135では、Vマップ生成部134においてVマップ情報が生成されたら、路面に対応する視差値及びy方向位置の組(Vマップ要素)が示す特徴、すなわち、撮像画像の上方に向かうほど視差値が低くなるという特徴を示すVマップ上の高頻度の点を直線近似する処理を行う。なお、路面が平坦な場合には一本の直線で十分な精度で近似可能であるが、車両進行方向において路面の傾斜状況が変化するような路面については、一本の直線で十分な精度の近似は難しい。従って、本実施形態においては、Vマップの情報(Vマップ情報)を視差値に応じて2以上の視差値区画に区分けし、各視差値区画についてそれぞれ個別に直線近似を行う。
本実施形態の路面形状検出部135は、Vマップ生成部134から出力されるVマップ情報(Vマップ情報)を受け取ると、まず、路面候補点検出部135aにおいて、路面に対応するVマップ要素が示す特徴、即ち、撮像画像の上方に向かうほど視差値が低くなるという特徴を示すVマップ上の高頻度の点を、路面候補点として検出する。
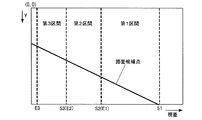
図10Aに示したように、自車両100の前方を撮像した撮像画像で、近距離の路面部分についてはその路面画像領域の占有面積が大きく、路面に対応する画素数が多いので、Vマップ上の頻度が大きい。これに対し、遠距離の路面部分については、その路面画像領域の撮像画像内における占有面積が小さく、路面に対応する画素数が少ないので、Vマップ上の頻度が小さい。すなわち、Vマップにおいて、路面に対応する点の頻度値は、遠距離では小さく、近距離では大きい。そのため、例えば同じ頻度閾値を用いるなど、両領域について同じ基準で路面候補点を検出しようとすると、近距離領域については路面候補点を適切に検出できるが、遠距離領域については路面候補点が適切に検出できないおそれがあり、遠距離領域の路面検出精度が劣化する。逆に、遠距離領域の路面候補点を十分に検出できるような基準で近距離領域の検出を行うと、近距離領域のノイズ成分が多く検出され、近距離領域の路面検出精度が劣化する。そこで、本実施形態では、Vマップを近距離領域と遠距離領域とに区分し、各領域についてそれぞれ適した基準や検出方法を用いて路面候補点を検出することにより、両領域の路面検出精度を高く維持している。
第1路面候補点検出処理では、各視差値dについて、所定の検索範囲内でy方向位置を変えながら、Vマップ情報に含まれる各Vマップ要素(d,y,f)の頻度値fが第1頻度閾値よりも大きく、かつ、最も頻度値fが大きいVマップ要素を探索し、そのVマップ要素を当該視差値dについての路面候補点として決定する。このときの第1頻度閾値は、低めに設定し、路面に対応するVマップ要素が抜け落ちないようにするのが好ましい。本実施形態においては、上述したとおり、Vマップ生成部134において路面に対応するVマップ要素を抽出していることから、第1頻度閾値を低めに設定しても、路面分に対応しないVマップ要素が路面候補点として決定される事態は軽減されるからである。
入力されるVマップの情報について、例えば視差値dの大きい順に路面候補点の検出を行い、各視差値dについての路面候補点(y,d)を検出する。視差値dが所定の基準距離に対応する基準視差値よりも大きい場合(ステップS81:YES)、上述した第1路面候補点検出処理を行う。すなわち、当該視差値dに応じたyの探索範囲(「yp−δn」〜「yp+δn」)を設定し(ステップS82)、この探索範囲内における頻度値fが第1頻度閾値よりも大きいVマップ要素(d,y,f)を抽出する(ステップS83)。そして、抽出したVマップ要素のうち、最大の頻度値fを持つVマップ要素(d,y,f)を、当該視差値dの路面候補点として検出する(ステップS84)。
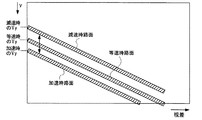
本実施形態においては、Vマップ情報を視差値に応じて3つの視差値区画に区分けする。具体的には、視差値が大きい順に、第1区間、第2区間、第3区間に区分けする。このとき、距離を基準にして区間を等しく区分けする場合、Vマップ上では遠距離の区間ほど区間(視差値範囲)が狭くなり、直線近似の精度が悪化する。また、視差値を基準にして区間を等しく区分けする場合、今度は、Vマップ上において近距離の区間の幅が狭くなる。この場合、第1区間が非常に狭いものとなって、その第1区間はほとんど意味を成さなくなる。
以上のようにして、路面形状検出部135においてVマップ上の近似直線の情報が得られたら、次に、路面高さテーブル算出部136において、路面高さ(自車両の真下の路面部分に対する相対的な高さ)を算出してテーブル化する路面高さテーブル算出処理を行う。路面形状検出部135により生成されたVマップ上の近似直線の情報から、撮像画像上の各行領域(画像上下方向の各位置)に映し出されている各路面部分までの距離を算出できる。一方、自車両の真下に位置する路面部分をその面に平行となるように自車両進行方向前方へ延長した仮想平面の自車両進行方向における各面部分が、撮像画像中のどの各行領域に映し出されるかは予め決まっており、この仮想平面(基準路面)はVマップ上で直線(基準直線)により表される。路面形状検出部135から出力される近似直線を基準直線と比較することで、自車両前方の各路面部分の高さを得ることができる。簡易的には、路面形状検出部135から出力される近似直線上のY軸位置から、これに対応する視差値から求められる距離だけ自車両前方に存在する路面部分の高さを算出できる。路面高さテーブル算出部136では、近似直線から得られる各路面部分の高さを、必要な視差範囲についてテーブル化する。
H=z×(y’−y0)/f …式〔2〕
マップ生成手段11に対応するUマップ生成部137について説明する。
Uマップ生成部137では、Uマップを生成するUマップ生成処理、即ちマップ生成工程(ステップS61)に対応する処理として、頻度Uマップ生成処理及び高さUマップ生成処理を実行する。
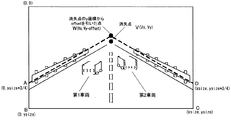
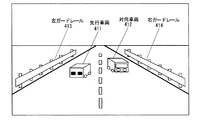
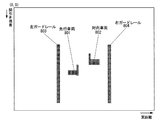
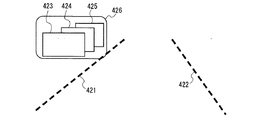
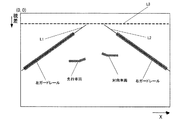
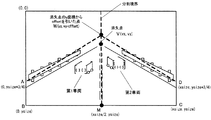
03,604に分布する。一方、先行車両411と対向車両412に対応する高頻度の点は、左右のガードレールの間で、略X軸方向に平行に延びる線分の状態601,602で分布する。なお、先行車両411の背面部分又は対向車両412の前面部分以外に、これらの車両の側面部分が映し出されているような状況にあっては、同じ他車両を映し出している画像領域内において視差が生じる。このような場合、図32Aに示すように、他車両に対応する高頻度の点は、略X軸方向に平行に延びる線分と略X軸方向に対して傾斜した線分とが連結した状態の分布を示す。
以上のようにUマップを生成したら、次にリアルUマップ生成部138がリアルUマップを生成する。リアルUマップは、Uマップにおける横軸を画像の画素単位から実際の距離に変換し、縦軸の視差値を距離に応じた間引き率を有する間引き視差に変換したものである。リアルUマップは、マップ生成手段11に含んでも良いが、以降の処理を行えるようであれば必ずしも要するものではない。
カメラから見て左右10mずつ、即ち20mの幅をオブジェクト検出範囲として設定する。リアルUマップの横方向1画素の幅を10cmとすると、リアルUマップの横方向サイズは200画素となる。
次に、オブジェクト候補領域検出手段12に対応するオブジェクト候補領域検出部139について説明する。
オブジェクト候補領域検出部139では、まずリアルUマップ生成部138で生成された頻度リアルUマップの情報の平滑化を行う(ステップS111)。
図37は、周辺領域除去について説明するためのリアルUマップであり、図38は、周辺領域除去処理の流れを示すフローチャートである。ここで、図37Aは、平滑化後のリアル頻度Uマップであり、図37Bは、リアル高さUマップであり、図37Cは、周辺領域が除去されたリアル高さUマップである。これらのマップは実データを模式的に示したものである(後記の図39、図41も同様)。また、このリアル頻度Uマップは、図33における車両(先行車両や対向車両)に対応する点の分布の付近を取り出したものである。また、リアル高さUマップは、不図示のリアル高さUマップにおける車両に対応する点の分布の付近を取り出したものである。
(i)ライン内に高さを持つ点が所定の点数(たとえば5)以下で閾値以上の高さを持つ点
がない。
(ii)ライン内に閾値以上の高さを持つ点数が閾値未満の高さを持つ点数より少なく、閾
値以上の高さを持つ点数が2未満である。
(iii)閾値以上の高さを持つ点数がライン全体の高さを持つ点数の10%未満である。
(v)列内に閾値以上の高さを持つ点数が閾値未満の高さを持つ点数より少なく,閾値以上の高さを持つ点数が2未満である。
(vi)閾値以上の高さを持つ点数が列全体の高さを持つ点数の10%未満である。
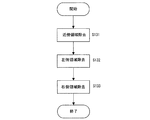
図39は、横方向分割について説明するための図であり、図40は、横方向分割処理の流れを示すフローチャートである。ここで、図39Aは、平滑化後のリアル頻度Uマップを示し、図39Bは、リアル高さUマップを示す。また、図39Cは、分割境界の検出方法を示す。
(vii)連結している部分の頻度値は、オブジェクトの頻度値よりも比較的小さくなる。
(viii)高さUマップで連結している部分は、オブジェクトの部分とは高さが異なったり、高さを持つデータが少なかったりする。
(ix)視差補間の影響で連結している部分は、高さUマップにおける視差の分散が小さい。
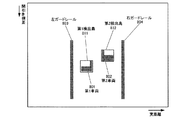
図41は、縦方向分割が有効な場合について説明するための図であり、図42は、縦方向分割について説明するための図である。また、図43は、縦方向分割処理の流れを示すフローチャートであり、図44は、縦方向分割における分割境界について説明するための図である。
(x)W>1500mmかつZmin>100mのとき、Zmax−Zmin>50m
(xi)W>1500mmかつ100m≧Zmin>20mのとき、Zmax−Zmin>40m
(xii1)50m≦Zmin<100mならば、Zr=25m
(xiv)100m≦Zminならば、Zr=30m
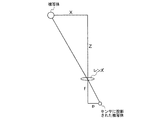
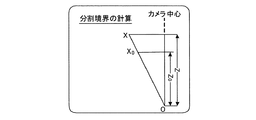
カメラの原点(レンズの中心)をO、カメラの向いている方向をカメラ中心軸(リアルUマップの中心の縦軸)の方向とする。また、実幅領域の分割境界の位置が、距離Z0,横位置X0とする。このとき距離Zにおける分割境界の位置をXとすると下記の式〔3〕が成り立つ。
X=X0*(Z/Z0) …式〔3〕
X=X0*(d0−offset)/(d−offset) …式〔4〕
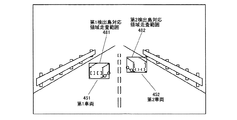
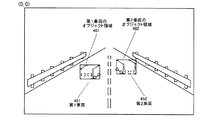
次に、視差画像の対応領域検出部140及びオブジェクト領域抽出部141について説明する。これらは立体物検出手段13に対応する。図45は、オブジェクト候補領域検出部139でオブジェクト候補領域として登録された孤立領域が内接する矩形領域を設定したリアル頻度Uマップを示す図であり、図46は、図45における矩形領域に対応する走査範囲を設定した視差画像を示す図であり、図47は、図46における走査範囲を探索してオブジェクト領域を設定した視差画像を示す図である。
まずリアルUマップにおける島の位置、幅と最小視差から、視差画像に対するx軸方向の探索範囲を設定する(ステップS161)。
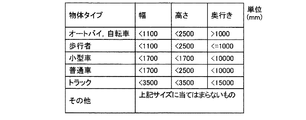
次に、オブジェクトタイプ分類部142について説明する。
前記オブジェクト領域抽出部141で抽出されるオブジェクト領域の高さ(yomax−yomin)から、下記の式〔5〕より、そのオブジェクト領域に対応する画像領域に映し出されている識別対象物(オブジェクト)の実際の高さHoを計算できる。ただし、「zo」は、当該オブジェクト領域内の最小視差値dから計算される当該オブジェクト領域に対応するオブジェクトと自車両との距離であり、「f」はカメラの焦点距離を(yomax−yomin)の単位と同じ単位に変換した値である。
Ho=zo×(yomax−yomin)/f …式〔5〕
Wo=zo×(xomax−xomin)/f …式〔6〕
Do=BF×{(1/(dmin−offset)−1/(dmax−offset)} …式〔7〕
次に、3次元位置決定部143について説明する。
検出されたオブジェクト領域に対応するオブジェクトまでの距離や、視差画像の画像中心と視差画像上のオブジェクト領域の中心との画像上の距離も把握されることから、オブジェクトの3次元位置を決定することができる。
Xo=Z×(region_centerX−image_centerX)/f …式〔8〕
Yo=Z×(region_centerY−image_centerY)/f …式〔9〕
次にガードレール検出部144について説明する。
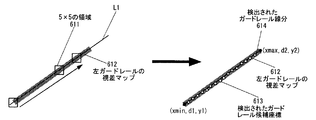
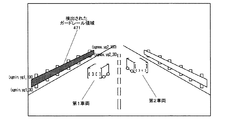
図50は、ガードレール検出部144で行われるガードレール検出処理の流れを示すフローチャートであり、図51は、ガードレール検出処理の対象範囲について直線近似処理して得られた近似直線を表したUマップを示す図である。また、図52は、直線近似処理して得られた直線からガードレール候補座標を検出するための処理について説明するための図である。
視差画像上でのガードレール領域471は、(xgmin,yg1_30)、(xgmin、yg1_100)、(xgmax、yg2_100)、(xgmax_yg2_30)の4点で囲まれる領域(図中に網掛けした領域)となる。なお、ここでは左側のガードレールについて説明したが、右側のガードレールについても同様に検出できる。
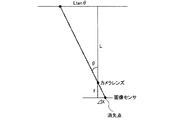
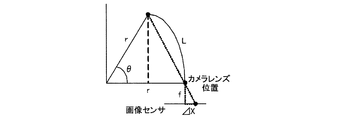
次に、Vマップ生成部134における処理に用いる消失点情報について説明する。
消失点情報は、路面の消失点に対応する画像上の位置座標を示す情報である。この消失点情報は、撮像画像上に映し出される路面上の白線や車両動作情報などから特定することができる。
Δx=f×tanθ/pixelsize …式〔10〕
Vx=xsize/2+Δx …式〔11〕
Δx=±(1−cosθ)×f×r/L/pixelsize …式〔12〕
次に、前記実施形態についての他の変形例(以下「変形例1」という。)について説明する。
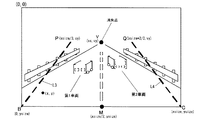
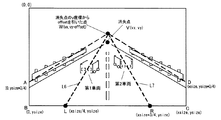
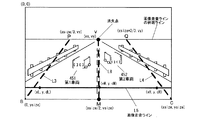
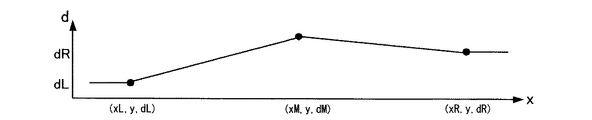
前記実施形態においては、自車両進行方向における路面の高さ変化(自車両進行方向における路面の起伏)を把握することはできるが、路面幅方向における路面高さの違い(路面幅方向における路面の傾斜)を把握することはできない。本変形例1では、路面幅方向における路面の傾斜を把握することができる例について説明する。
3,Vy)と地点C(xsize,ysize)とを結ぶ直線L4を作成する。そして、それぞれの直線上における点(x,y)に対し、左右の領域についてそれぞれ得た区分近似直線上の点(y,d)を関連付け、(x,y,d)の関係を作成する(ステップS182)。これにより、図59に示す左右の直線L3,L4上における路面の高さを決定することができる(ステップS183)。
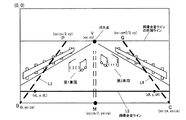
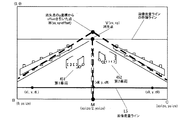
次に、前記実施形態についての他の変形例(以下「変形例2」という。)について説明する。
実際の路面の中には、路面の排水を良くするために路面の幅方向中央部分が高くなっているかまぼこ型の形状を示す路面がある。このような路面については、前記変形例1の場合には、路面幅方向における路面傾斜を適切に検出することができない。本変形例2においては、前記変形例1よりもより高精度に路面幅方向における路面傾斜を把握することができるものである。
Claims (10)
- 移動体に搭載された複数の撮像手段により前記移動体の移動方向の前方を撮像して得た複数の撮像画像及びその撮像画像から生成した視差画像に基づいて、前記移動方向の前方に存在する立体物を検出する立体物検出装置であって、
前記視差画像に基づいて、前記移動方向に対する横方向の距離と前記移動方向の距離とを関連付けた視差値の頻度分布を表すマップを生成するマップ生成手段と、
前記頻度分布に基づいて孤立領域を検出する孤立領域検出手段と、
前記孤立領域内の前記頻度分布に基づいて、前記孤立領域を分割する孤立領域分割手段と、
前記分割された孤立領域に基づいて立体物を検出する立体物検出手段と、
を有する立体物検出装置。 - 請求項1に記載された立体物検出装置において、
前記孤立領域分割手段は、前記孤立領域の前記移動方向の長さが所定の値より長い場合、前記孤立領域を前記移動方向に分割する移動方向分割手段を有する、立体物検出装置。 - 請求項1又は2に記載された立体物検出装置において、
前記孤立領域分割手段は、前記孤立領域の前記横方向の長さが所定の値より長い場合、前記孤立領域を前記横方向に分割する横方向分割手段を有する、立体物検出装置。 - 請求項2に記載された立体物検出装置において、
前記移動方向分割手段は、前記孤立領域の前記移動方向の長さが前記移動方向の距離に応じて設定された長さより長い場合に、前記頻度分布に基づいて前記孤立領域内の立体物の実幅を推定し、その実幅と視差値とから前記孤立領域を分割する位置を決定する、立体物検出装置。 - 請求項3に記載された立体物検出装置において、
前記マップ生成手段は、前記視差値の高さ分布を表すマップを生成し、
前記横方向分割手段は、前記孤立領域内の前記頻度分布と高さ分布の積を前記移動方向に加算した値に基づいて、前記孤立領域を分割する位置を決定する、立体物検出装置。 - 請求項1乃至3のいずれかに記載された立体物検出装置において、
前記マップ生成手段は、前記視差値の高さ分布を表すマップを生成し、
前記孤立領域分割手段は、孤立領域内の周辺部の高さの低い部分を除去する周辺領域除去手段を有する、立体物検出装置。 - 請求項4に記載された立体物検出装置において、
前記移動方向分割手段は、前記孤立領域内の頻度を前記横方向に加算して、最大値を得る移動方向の位置を検出する手段と、前記検出された位置での連続した頻度の最大長を前記立体物の実幅と推定する手段と、を有する、立体物検出装置。 - 移動体に搭載された複数の撮像手段により前記移動体の移動方向の前方を撮像して得た複数の撮像画像及びその撮像画像から生成した視差画像に基づいて、前記移動方向の前方に存在する立体物を検出する立体物検出装置により実行される立体物検出方法であって、
前記視差画像に基づいて、前記移動方向に対する横方向の距離と前記移動方向の距離とを関連付けた視差値の頻度分布を表すマップを生成する工程と、
前記頻度分布に基づいて孤立領域を検出する工程と、
前記孤立領域内の前記頻度分布に基づいて、前記孤立領域を分割する工程と、
前記分割された孤立領域に基づいて立体物を検出する工程と、
を有する立体物検出方法。 - コンピュータを、請求項1乃至7のいずれかに記載された立体物検出装置における各手段として機能させるための立体物検出プログラム。
- 移動体に搭載された複数の撮像手段により前記移動体の移動方向の前方を撮像して得た複数の撮像画像及びその撮像画像から生成した視差画像に基づいて、前記移動方向の前方に存在する立体物を検出する立体物検出手段と、
前記立体物検出手段の処理結果に基づいて、前記移動体に搭載された所定の機器を制御する移動体機器制御手段と、を有する移動体機器制御システムであって、
前記立体物検出手段として、請求項1乃至7のいずれかに記載された立体物検出装置を用いる、移動体機器制御システム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015062340A JP6519262B2 (ja) | 2014-04-10 | 2015-03-25 | 立体物検出装置、立体物検出方法、立体物検出プログラム、及び移動体機器制御システム |
| US14/682,496 US9330320B2 (en) | 2014-04-10 | 2015-04-09 | Object detection apparatus, object detection method, object detection program and device control system for moveable apparatus |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014081390 | 2014-04-10 | ||
| JP2014081390 | 2014-04-10 | ||
| JP2015062340A JP6519262B2 (ja) | 2014-04-10 | 2015-03-25 | 立体物検出装置、立体物検出方法、立体物検出プログラム、及び移動体機器制御システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015207281A JP2015207281A (ja) | 2015-11-19 |
| JP6519262B2 true JP6519262B2 (ja) | 2019-05-29 |
Family
ID=54265316
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015062340A Active JP6519262B2 (ja) | 2014-04-10 | 2015-03-25 | 立体物検出装置、立体物検出方法、立体物検出プログラム、及び移動体機器制御システム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9330320B2 (ja) |
| JP (1) | JP6519262B2 (ja) |
Families Citing this family (64)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104603841B (zh) * | 2012-08-30 | 2017-10-24 | 本田技研工业株式会社 | 行车线标识识别装置 |
| JP6519262B2 (ja) * | 2014-04-10 | 2019-05-29 | 株式会社リコー | 立体物検出装置、立体物検出方法、立体物検出プログラム、及び移動体機器制御システム |
| TWI500904B (zh) * | 2014-09-18 | 2015-09-21 | Vivotek Inc | 立體攝影機及用來測量立體攝影機與基準面之距離的自動測距方法 |
| US9794543B2 (en) * | 2015-03-02 | 2017-10-17 | Ricoh Company, Ltd. | Information processing apparatus, image capturing apparatus, control system applicable to moveable apparatus, information processing method, and storage medium of program of method |
| JP6805534B2 (ja) | 2015-07-02 | 2020-12-23 | 株式会社リコー | 視差画像生成装置、視差画像生成方法及び視差画像生成プログラム、物体認識装置、機器制御システム |
| JP6592991B2 (ja) * | 2015-07-06 | 2019-10-23 | 株式会社リコー | 物体検出装置、物体検出方法及びプログラム |
| WO2017047282A1 (ja) | 2015-09-15 | 2017-03-23 | 株式会社リコー | 画像処理装置、物体認識装置、機器制御システム、画像処理方法およびプログラム |
| JP6657789B2 (ja) * | 2015-10-29 | 2020-03-04 | 株式会社リコー | 画像処理装置、撮像装置、機器制御システム、頻度分布画像生成方法、及びプログラム |
| WO2017090326A1 (ja) | 2015-11-27 | 2017-06-01 | 株式会社リコー | 画像処理装置、撮像装置、機器制御システム、分布データ生成方法、及びプログラム |
| JP6597792B2 (ja) | 2015-11-30 | 2019-10-30 | 株式会社リコー | 画像処理装置、物体認識装置、機器制御システム、画像処理方法およびプログラム |
| JP6547841B2 (ja) * | 2015-12-10 | 2019-07-24 | 株式会社リコー | 画像処理装置、物体認識装置、機器制御システム、画像処理方法およびプログラム |
| WO2017104574A1 (ja) | 2015-12-14 | 2017-06-22 | 株式会社リコー | 画像処理装置、物体認識装置、機器制御システム、画像処理方法およびプログラム |
| EP3399499A4 (en) | 2015-12-28 | 2019-01-09 | Ricoh Company, Ltd. | Image Processing Device, Object Recognition Device, Machine Control System, Image Processing Method, and Image Processing Program |
| JP6587000B2 (ja) | 2016-01-28 | 2019-10-09 | 株式会社リコー | 画像処理装置、撮像装置、移動体機器制御システム、画像処理方法、及びプログラム |
| JP6702340B2 (ja) * | 2016-01-28 | 2020-06-03 | 株式会社リコー | 画像処理装置、撮像装置、移動体機器制御システム、画像処理方法、及びプログラム |
| WO2017128441A1 (zh) * | 2016-01-31 | 2017-08-03 | 冯旋宇 | 车辆图像测距方法及系统 |
| JP6690267B2 (ja) * | 2016-02-03 | 2020-04-28 | トヨタ自動車株式会社 | 車両用立体物検出装置 |
| EP3413267B1 (en) * | 2016-02-05 | 2023-06-28 | Ricoh Company, Ltd. | Object detection device, device control system, objection detection method, and program |
| WO2017138245A1 (ja) | 2016-02-08 | 2017-08-17 | 株式会社リコー | 画像処理装置、物体認識装置、機器制御システム、画像処理方法およびプログラム |
| WO2017145600A1 (ja) | 2016-02-23 | 2017-08-31 | 株式会社リコー | 画像処理装置、撮像装置、移動体機器制御システム、画像処理方法、及びプログラム |
| JP6733225B2 (ja) | 2016-03-08 | 2020-07-29 | 株式会社リコー | 画像処理装置、撮像装置、移動体機器制御システム、画像処理方法、及びプログラム |
| JP6631691B2 (ja) | 2016-03-10 | 2020-01-15 | 株式会社リコー | 画像処理装置、機器制御システム、撮像装置、画像処理方法、及び、プログラム |
| EP3428902A4 (en) | 2016-03-10 | 2019-08-14 | Ricoh Company, Ltd. | IMAGE PROCESSING DEVICE, IMAGING DEVICE, MOBILE DEVICE CONTROL SYSTEM, PICTURE PROCESSING PROCESS AND PROGRAM |
| WO2017159082A1 (ja) | 2016-03-14 | 2017-09-21 | 株式会社リコー | 画像処理装置、機器制御システム、撮像装置、画像処理方法及びプログラム |
| EP3432291A4 (en) | 2016-03-15 | 2019-03-27 | Ricoh Company, Ltd. | Image Processing Device, Object Recognition Device, Device Control System, Image Processing Method and Program |
| WO2017159056A1 (ja) | 2016-03-17 | 2017-09-21 | 株式会社リコー | 画像処理装置、撮像装置、移動体機器制御システム、画像処理方法、及びプログラム |
| JP6683245B2 (ja) | 2016-03-18 | 2020-04-15 | 株式会社リコー | 画像処理装置、画像処理方法、画像処理プログラム、物体認識装置及び機器制御システム |
| WO2017158964A1 (ja) | 2016-03-18 | 2017-09-21 | 株式会社リコー | 画像処理装置、移動体機器制御システム、画像処理用プログラム及び画像処理方法 |
| JP6936557B2 (ja) * | 2016-05-16 | 2021-09-15 | 日立Astemo株式会社 | 探索処理装置、及びステレオカメラ装置 |
| JP6816401B2 (ja) * | 2016-08-09 | 2021-01-20 | 株式会社リコー | 画像処理装置、撮像装置、移動体機器制御システム、画像処理方法、及びプログラム |
| JP6836350B2 (ja) * | 2016-08-11 | 2021-02-24 | 株式会社Subaru | 移動速度演算装置 |
| EP3293671B1 (en) * | 2016-09-12 | 2020-04-15 | Ricoh Company, Ltd. | Image processing device, object recognizing device, device control system, moving body, image processing method, and program |
| KR102507383B1 (ko) * | 2016-11-08 | 2023-03-08 | 한국전자통신연구원 | 직사각형 윈도우를 이용한 스테레오 정합 방법 및 스테레오 정합 시스템 |
| JP6943092B2 (ja) * | 2016-11-18 | 2021-09-29 | 株式会社リコー | 情報処理装置、撮像装置、機器制御システム、移動体、情報処理方法、及び、情報処理プログラム |
| JP6969245B2 (ja) * | 2016-11-18 | 2021-11-24 | 株式会社リコー | 情報処理装置、撮像装置、機器制御システム、移動体、情報処理方法、及び、情報処理プログラム |
| EP3327696B1 (en) * | 2016-11-22 | 2021-03-17 | Ricoh Company, Ltd. | Information processing apparatus, imaging device, device control system, mobile body, information processing method, and program |
| US10628960B2 (en) | 2016-11-24 | 2020-04-21 | Ricoh Company, Ltd. | Information processing apparatus, imaging apparatus, device control system, moving object, information processing method, and recording medium |
| JP7206583B2 (ja) * | 2016-11-25 | 2023-01-18 | 株式会社リコー | 情報処理装置、撮像装置、機器制御システム、移動体、情報処理方法およびプログラム |
| JP6907513B2 (ja) * | 2016-11-25 | 2021-07-21 | 株式会社リコー | 情報処理装置、撮像装置、機器制御システム、情報処理方法およびプログラム |
| JP7119317B2 (ja) | 2016-11-28 | 2022-08-17 | 株式会社リコー | 情報処理装置、撮像装置、機器制御システム、移動体、情報処理方法、及び、情報処理プログラム |
| JP6844223B2 (ja) * | 2016-11-30 | 2021-03-17 | 株式会社リコー | 情報処理装置、撮像装置、機器制御システム、情報処理方法およびプログラム |
| JP6950170B2 (ja) * | 2016-11-30 | 2021-10-13 | 株式会社リコー | 情報処理装置、撮像装置、機器制御システム、情報処理方法、及びプログラム |
| JP2018092596A (ja) | 2016-11-30 | 2018-06-14 | 株式会社リコー | 情報処理装置、撮像装置、機器制御システム、移動体、情報処理方法、およびプログラム |
| CN109983468A (zh) * | 2016-12-01 | 2019-07-05 | 深圳市大疆创新科技有限公司 | 使用特征点检测和跟踪对象的方法和系统 |
| JP6597588B2 (ja) | 2016-12-20 | 2019-10-30 | トヨタ自動車株式会社 | 画像表示装置 |
| JP6601422B2 (ja) * | 2017-01-11 | 2019-11-06 | トヨタ自動車株式会社 | 画像表示装置 |
| CN107330881B (zh) * | 2017-06-30 | 2020-11-06 | 燕山大学 | 一种用于识别轮毂气门孔的方法 |
| JP6764378B2 (ja) * | 2017-07-26 | 2020-09-30 | 株式会社Subaru | 車外環境認識装置 |
| EP3667612B1 (en) * | 2017-08-07 | 2024-08-28 | Hitachi Astemo, Ltd. | Roadside object detection device, roadside object detection method, and roadside object detection system |
| US10647282B2 (en) * | 2017-11-06 | 2020-05-12 | Magna Electronics Inc. | Vehicle vision system with undercarriage cameras |
| JP7091686B2 (ja) * | 2018-02-08 | 2022-06-28 | 株式会社リコー | 立体物認識装置、撮像装置および車両 |
| CN110378185A (zh) * | 2018-04-12 | 2019-10-25 | 北京图森未来科技有限公司 | 一种应用于自动驾驶车辆的图像处理方法、装置 |
| JP7103834B2 (ja) * | 2018-04-20 | 2022-07-20 | 株式会社小松製作所 | 作業機械の制御システム、作業機械、及び作業機械の制御方法 |
| FR3080702A1 (fr) * | 2018-04-25 | 2019-11-01 | Valeo Schalter Und Sensoren Gmbh | Estimation de la distance separant un vehicule automobile d'objets detectes par traitement d'images capturees depuis le vehicule automobile |
| CN110728710B (zh) * | 2018-07-16 | 2023-10-27 | 株式会社理光 | 视觉里程计算方法、装置和计算机可读存储介质 |
| KR102586966B1 (ko) * | 2018-08-01 | 2023-10-10 | 한화에어로스페이스 주식회사 | 실내-지도 생성 시스템 및 실내-탐사 로봇 |
| JP2020053774A (ja) | 2018-09-25 | 2020-04-02 | 株式会社リコー | 撮像装置および画像記録方法 |
| CN110162040B (zh) * | 2019-05-10 | 2022-06-17 | 重庆大学 | 一种基于深度学习的低速自动驾驶小车控制方法及系统 |
| CN111179232A (zh) * | 2019-12-20 | 2020-05-19 | 山东大学 | 基于图像处理的钢筋尺寸检测系统及方法 |
| US11312300B1 (en) * | 2021-01-29 | 2022-04-26 | Toyota Motor Engineering & Manufacturing North America, Inc. | Object notification systems for identifying and notifying vehicles of relevant objects |
| CN115717890A (zh) * | 2022-10-13 | 2023-02-28 | 上海中电电子系统科技股份有限公司 | 一种基于机器人巡检的洁净室洁净度检测方法 |
| US12526506B2 (en) | 2023-01-30 | 2026-01-13 | Magna Electronics Inc. | Vehicular vision system with underbody object detection |
| TWI870950B (zh) * | 2023-07-31 | 2025-01-21 | 國立中央大學 | 可量測物件橫向/縱向/斜向速度之深度攝影機 |
| JP2026019326A (ja) * | 2024-07-26 | 2026-02-05 | Astemo株式会社 | 画像処理装置、車両制御システム及び画像処理方法 |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6384414B1 (en) * | 1997-11-25 | 2002-05-07 | Board Of Regents, The University Of Texas System | Method and apparatus for detecting the presence of an object |
| JP3562751B2 (ja) * | 1998-06-09 | 2004-09-08 | 矢崎総業株式会社 | 前方車両検出方法及び装置 |
| JP3739693B2 (ja) * | 2001-11-09 | 2006-01-25 | 本田技研工業株式会社 | 画像認識装置 |
| US7132975B2 (en) * | 2004-05-28 | 2006-11-07 | Time Domain Corporation | Apparatus and method for detecting moving objects |
| JP4719543B2 (ja) | 2005-09-26 | 2011-07-06 | 株式会社リコー | ワークフローシステム、サーバ装置、ワークフローシステムの処理方法及びワークフロープログラム |
| JP2007102545A (ja) | 2005-10-05 | 2007-04-19 | Ricoh Co Ltd | 電子文書作成装置、電子文書作成方法及び電子文書作成プログラム |
| JP4647515B2 (ja) | 2006-02-20 | 2011-03-09 | 株式会社リコー | 座標検出装置、筆記具および座標入力システム |
| JP5164351B2 (ja) * | 2006-09-07 | 2013-03-21 | 富士重工業株式会社 | 物体検出装置および物体検出方法 |
| ATE487111T1 (de) * | 2007-10-18 | 2010-11-15 | Nectar Imaging S R L | Vorrichtung zur tomografischen erfassung von objekten |
| JP5188452B2 (ja) | 2009-05-22 | 2013-04-24 | 富士重工業株式会社 | 道路形状認識装置 |
| US9229102B1 (en) * | 2009-12-18 | 2016-01-05 | L-3 Communications Security And Detection Systems, Inc. | Detection of movable objects |
| JP5664152B2 (ja) | 2009-12-25 | 2015-02-04 | 株式会社リコー | 撮像装置、車載用撮像システム及び物体識別装置 |
| US8867790B2 (en) | 2010-08-03 | 2014-10-21 | Panasonic Corporation | Object detection device, object detection method, and program |
| JP5580233B2 (ja) * | 2011-03-22 | 2014-08-27 | 富士重工業株式会社 | 車外監視装置および車外監視方法 |
| US9062980B2 (en) * | 2011-11-22 | 2015-06-23 | Hitachi, Ltd. | Autonomous mobile system |
| US20140319349A1 (en) * | 2011-11-23 | 2014-10-30 | National University Corporation Kobe University | Motion detection device |
| JP2014006885A (ja) | 2012-05-31 | 2014-01-16 | Ricoh Co Ltd | 段差認識装置、段差認識方法及び段差認識用プログラム |
| JP6398347B2 (ja) | 2013-08-15 | 2018-10-03 | 株式会社リコー | 画像処理装置、認識対象物検出方法、認識対象物検出プログラム、および、移動体制御システム |
| JP6340850B2 (ja) * | 2014-03-18 | 2018-06-13 | 株式会社リコー | 立体物検出装置、立体物検出方法、立体物検出プログラム、及び移動体機器制御システム |
| JP6519262B2 (ja) * | 2014-04-10 | 2019-05-29 | 株式会社リコー | 立体物検出装置、立体物検出方法、立体物検出プログラム、及び移動体機器制御システム |
-
2015
- 2015-03-25 JP JP2015062340A patent/JP6519262B2/ja active Active
- 2015-04-09 US US14/682,496 patent/US9330320B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US9330320B2 (en) | 2016-05-03 |
| JP2015207281A (ja) | 2015-11-19 |
| US20150294160A1 (en) | 2015-10-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6519262B2 (ja) | 立体物検出装置、立体物検出方法、立体物検出プログラム、及び移動体機器制御システム | |
| JP6550881B2 (ja) | 立体物検出装置、立体物検出方法、立体物検出プログラム、及び移動体機器制御システム | |
| JP6340850B2 (ja) | 立体物検出装置、立体物検出方法、立体物検出プログラム、及び移動体機器制御システム | |
| JP6274557B2 (ja) | 移動面情報検出装置、及びこれを用いた移動体機器制御システム並びに移動面情報検出用プログラム | |
| JP6662388B2 (ja) | 画像処理装置、撮像装置、機器制御システム、分布データ生成方法、及びプログラム | |
| JP6657789B2 (ja) | 画像処理装置、撮像装置、機器制御システム、頻度分布画像生成方法、及びプログラム | |
| JP6150164B2 (ja) | 情報検出装置、移動体機器制御システム、移動体及び情報検出用プログラム | |
| JP6705496B2 (ja) | 画像処理装置、撮像装置、移動体機器制御システム、移動体、画像処理方法、及びプログラム | |
| JP4650079B2 (ja) | 物体検出装置、および方法 | |
| JP6702340B2 (ja) | 画像処理装置、撮像装置、移動体機器制御システム、画像処理方法、及びプログラム | |
| EP2958054B1 (en) | Hazard detection in a scene with moving shadows | |
| JP5145585B2 (ja) | 物標検出装置 | |
| JP6583527B2 (ja) | 画像処理装置、撮像装置、移動体機器制御システム、画像処理方法、及びプログラム | |
| JP6705497B2 (ja) | 画像処理装置、撮像装置、移動体機器制御システム、画像処理方法、プログラム、及び移動体 | |
| JP6753134B2 (ja) | 画像処理装置、撮像装置、移動体機器制御システム、画像処理方法、及び画像処理プログラム | |
| JP2000357233A (ja) | 物体認識装置 | |
| US10748014B2 (en) | Processing device, object recognition apparatus, device control system, processing method, and computer-readable recording medium | |
| WO2021215199A1 (ja) | 情報処理装置、撮像システム、情報処理方法及びコンピュータプログラム | |
| JP2009053818A (ja) | 画像処理装置及びその方法 | |
| JP6340849B2 (ja) | 画像処理装置、画像処理方法、画像処理プログラム、及び移動体機器制御システム | |
| JP2009245042A (ja) | 交通流計測装置及びプログラム | |
| CN109522779B (zh) | 图像处理装置 | |
| JP6812701B2 (ja) | 画像処理装置、移動体機器制御システム、画像処理方法、及びプログラム | |
| JP2021056841A (ja) | 教師データ作成装置及び画像分類装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180208 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190208 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190326 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190408 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6519262 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |