JP6506626B2 - 記録装置及びその校正方法 - Google Patents
記録装置及びその校正方法 Download PDFInfo
- Publication number
- JP6506626B2 JP6506626B2 JP2015110798A JP2015110798A JP6506626B2 JP 6506626 B2 JP6506626 B2 JP 6506626B2 JP 2015110798 A JP2015110798 A JP 2015110798A JP 2015110798 A JP2015110798 A JP 2015110798A JP 6506626 B2 JP6506626 B2 JP 6506626B2
- Authority
- JP
- Japan
- Prior art keywords
- recording
- distance
- light
- light receiving
- height
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images














Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/015—Ink jet characterised by the jet generation process
- B41J2/04—Ink jet characterised by the jet generation process generating single droplets or particles on demand
- B41J2/045—Ink jet characterised by the jet generation process generating single droplets or particles on demand by pressure, e.g. electromechanical transducers
- B41J2/04501—Control methods or devices therefor, e.g. driver circuits, control circuits
- B41J2/04556—Control methods or devices therefor, e.g. driver circuits, control circuits detecting distance to paper
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J25/00—Actions or mechanisms not otherwise provided for
- B41J25/304—Bodily-movable mechanisms for print heads or carriages movable towards or from paper surface
- B41J25/308—Bodily-movable mechanisms for print heads or carriages movable towards or from paper surface with print gap adjustment mechanisms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/015—Ink jet characterised by the jet generation process
- B41J2/04—Ink jet characterised by the jet generation process generating single droplets or particles on demand
- B41J2/045—Ink jet characterised by the jet generation process generating single droplets or particles on demand by pressure, e.g. electromechanical transducers
- B41J2/04501—Control methods or devices therefor, e.g. driver circuits, control circuits
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/015—Ink jet characterised by the jet generation process
- B41J2/04—Ink jet characterised by the jet generation process generating single droplets or particles on demand
- B41J2/045—Ink jet characterised by the jet generation process generating single droplets or particles on demand by pressure, e.g. electromechanical transducers
- B41J2/04501—Control methods or devices therefor, e.g. driver circuits, control circuits
- B41J2/04506—Control methods or devices therefor, e.g. driver circuits, control circuits aiming at correcting manufacturing tolerances
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/015—Ink jet characterised by the jet generation process
- B41J2/04—Ink jet characterised by the jet generation process generating single droplets or particles on demand
- B41J2/045—Ink jet characterised by the jet generation process generating single droplets or particles on demand by pressure, e.g. electromechanical transducers
- B41J2/04501—Control methods or devices therefor, e.g. driver circuits, control circuits
- B41J2/04513—Control methods or devices therefor, e.g. driver circuits, control circuits for increasing lifetime
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/015—Ink jet characterised by the jet generation process
- B41J2/04—Ink jet characterised by the jet generation process generating single droplets or particles on demand
- B41J2/045—Ink jet characterised by the jet generation process generating single droplets or particles on demand by pressure, e.g. electromechanical transducers
- B41J2/04501—Control methods or devices therefor, e.g. driver circuits, control circuits
- B41J2/04586—Control methods or devices therefor, e.g. driver circuits, control circuits controlling heads of a type not covered by groups B41J2/04575 - B41J2/04585, or of an undefined type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J25/00—Actions or mechanisms not otherwise provided for
- B41J25/304—Bodily-movable mechanisms for print heads or carriages movable towards or from paper surface
- B41J25/308—Bodily-movable mechanisms for print heads or carriages movable towards or from paper surface with print gap adjustment mechanisms
- B41J25/3082—Bodily-movable mechanisms for print heads or carriages movable towards or from paper surface with print gap adjustment mechanisms with print gap adjustment means on the print head carriage, e.g. for rotation around a guide bar or using a rotatable eccentric bearing
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/015—Ink jet characterised by the jet generation process
- B41J2/04—Ink jet characterised by the jet generation process generating single droplets or particles on demand
- B41J2/045—Ink jet characterised by the jet generation process generating single droplets or particles on demand by pressure, e.g. electromechanical transducers
- B41J2/04501—Control methods or devices therefor, e.g. driver circuits, control circuits
- B41J2/04508—Control methods or devices therefor, e.g. driver circuits, control circuits aiming at correcting other parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J29/00—Details of, or accessories for, typewriters or selective printing mechanisms not otherwise provided for
- B41J29/38—Drives, motors, controls or automatic cut-off devices for the entire printing mechanism
- B41J29/393—Devices for controlling or analysing the entire machine ; Controlling or analysing mechanical parameters involving printing of test patterns
- B41J2029/3935—Devices for controlling or analysing the entire machine ; Controlling or analysing mechanical parameters involving printing of test patterns by means of printed test patterns
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J29/00—Details of, or accessories for, typewriters or selective printing mechanisms not otherwise provided for
- B41J29/38—Drives, motors, controls or automatic cut-off devices for the entire printing mechanism
- B41J29/393—Devices for controlling or analysing the entire machine ; Controlling or analysing mechanical parameters involving printing of test patterns
Landscapes
- Ink Jet (AREA)
- Common Mechanisms (AREA)
Description
図1は本発明の代表的な実施例であるA0やB0サイズなどの大きなサイズの記録媒体を用いるインクジェット記録装置の外観斜視図である。
R = F/N ……(1)
である。
GAP = K*R+C ……(2)
である。
GAP1= K*R1+C ……(3)
GAP2= K*R2+C ……(4)
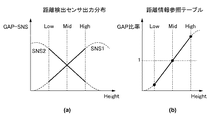
となる。ここで、R1、R2は、キャリッジ高がLow、Midである場合に得られるGAP比率である。そして、式(3)と式(4)の差分は式(5)で表わされる。即ち、
(GAP1−GAP2) = K*(R1−R2) ……(5)
となる。
(GAP1−GAP2) = K’*(R1−R2) ……(6)
である。ここで、図14(b)に示したように、インクミスト500の付着に伴う感度低下係数をMとすると、K’は式(7)で表わされる。即ち、
K’= K*M (M≦1) ……(7)
である。
202 キャリッジ、207 距離検出センサ、208 リフト昇降モータ、
209 記録用紙、210 プラテン、300 パソコン(PC)、
304 リフト昇降ユニット、312 ヘッド制御部、
401−a、401−b 受光部、402 発光部、405 メモリ、
406〜408 記憶領域、801 校正用記録用紙
Claims (14)
- 所定の方向に往復移動するキャリッジに搭載された記録ヘッドと、前記キャリッジに設けられ、前記記録ヘッドによる記録位置において前記記録ヘッドと記録媒体との間の距離を検出する検出手段と、前記記録位置から前記キャリッジまでの高さを変更する変更手段と、を有し、前記所定の方向とは交差する方向に搬送される前記記録媒体に記録を行う記録装置であって、
前記検出手段を用いた距離の検出を校正するための校正用の記録媒体を用い、前記変更手段により前記高さを変更しながら、複数の高さそれぞれについて前記検出手段により前記距離を検出した結果を表わす信号と前記高さとの関係を示す第1の距離情報を格納する記憶手段と、
所定の記録媒体を用いて、前記変更手段により前記高さを変更しながら、複数の高さそれぞれにおける前記検出手段により前記距離を検出した結果を表わす信号と前記高さとの関係を示す第2の距離情報を取得する取得手段と、
前記第1の距離情報と前記第2の距離情報とを比較して、該比較の結果に基づいて、前記記憶手段に格納された前記第1の距離情報を補正する補正手段とを有することを特徴とする記録装置。 - 前記検出手段は、
前記記録位置に対して光を照射する発光部と、
前記記録位置において前記発光部から照射された光の反射光が入射する開口部と、
前記開口部を通して第1の入射角度で入射する前記反射光を受光する第1の受光部と、
前記開口部を通して前記第1の入射角度とは異なる第2の入射角度で入射する前記反射光を受光する第2の受光部とを含むことを特徴とする請求項1に記載の記録装置。 - 前記第1の受光部により受光する受光光量と前記第2の受光部により受光する受光光量はそれぞれ、前記高さに応じて異なる光量となることを特徴とする請求項2に記載の記録装置。
- 前記記憶手段は、前記記録装置の動作の初期において、前記変更手段により前記高さを変更しながら、前記検出手段により得られる前記第1の受光部又は前記第2の受光部における受光光量が最大となる前記高さと前記最大の受光光量とを格納し、
前記補正手段は、前記記憶手段に格納された前記最大の受光光量と前記第2の距離情報との比較から得られる前記検出手段の劣化の度合いに基づいて、前記記憶手段に格納された前記第1の距離情報を補正することを特徴とする請求項2又は3に記載の記録装置。 - 前記記録ヘッドはインクを吐出して記録を行うインクジェット記録ヘッドであることを特徴とする請求項4に記載の記録装置。
- 前記インクジェット記録ヘッドによるインクの吐出により発生するインクミストが前記発光部に付着した場合は、前記発光部から照射される光の光量が低下し、前記第1の受光部と前記第2の受光部のそれぞれにおける受光光量が同じように低下し、
前記インクジェット記録ヘッドによるインクの吐出により発生するインクミストが前記第1の受光部に付着した場合は、前記第1の受光部における受光光量が前記第2の受光部における受光光量よりも低下することを特徴とする請求項5に記載の記録装置。 - 前記第1の受光部により受光する受光光量と前記第2の受光部により受光する受光光量との比率を算出する第1の算出手段と、
前記第1の算出手段により算出される比率と前記高さとの関係を前記第1の距離情報及び前記第2の距離情報として求め、該求めた第1の距離情報と第2の距離情報とを比較し、該比較から前記第1の距離情報に対する補正係数を算出する第2の算出手段とをさらに有することを特徴とする請求項5又は6に記載の記録装置。 - 前記第2の算出手段により算出された補正係数を前記記憶手段に格納することを特徴とする請求項7に記載の記録装置。
- 前記インクジェット記録ヘッドにより吐出されるインク液滴の数をカウントするカウント手段と、
前記カウント手段によりカウントされた数と所定の閾値とを比較する比較手段と、
前記カウントされた数が前記所定の閾値以上になったときに、前記取得手段と前記補正手段とを動作させるよう制御する制御手段とをさらに有することを特徴とする請求項5乃至8のいずれか1項に記載の記録装置。 - 前記所定の記録媒体は、校正用の記録媒体、又は、ユーザが記録に用いる記録媒体であることを特徴とする請求項1乃至9のいずれか1項に記載の記録装置。
- 前記記憶手段は、前記校正用に利用可能な記録媒体の厚さの情報、該記録媒体の前記記録位置から前記記録ヘッドまでの距離に関する情報を格納することを特徴とする請求項10に記載の記録装置。
- 前記ユーザが記録に用いる記録媒体を前記校正用に用いる場合には、前記記憶手段に格納された前記校正用に利用可能な記録媒体の厚さの情報、該記録媒体の前記記録位置から前記記録ヘッドまでの距離に関する情報を参照して、当該記録媒体が前記校正用に利用可能であるかどうかを判断する第1の判断手段をさらに有することを特徴とする請求項10又は11に記載の記録装置。
- 前記複数の高さにわたり、前記第2の距離情報に線形性があるかどうかを判断し、前記線形性に基づいて、前記第2の距離情報により前記記憶手段に格納された前記第1の距離情報を補正するかどうかを判断する第2の判断手段をさらに有することを請求項1乃至12のいずれか1項に記載の記録装置。
- 所定の方向に往復移動するキャリッジに搭載された記録ヘッドを用いて、前記所定の方向とは異なる方向に搬送される記録媒体に記録を行うとともに、前記キャリッジに設けられたセンサにより、前記記録ヘッドによる記録位置において前記記録ヘッドと前記記録媒体との間の距離を検出する記録装置における校正方法であって、
前記距離の検出を校正するための校正用の記録媒体を用い、前記記録位置から前記キャリッジまでの高さを変更する変更手段により前記高さを変更しながら、複数の高さそれぞれについて前記センサにより前記距離を検出した結果を表わす信号と前記高さとの関係を示す第1の距離情報をメモリに格納する記憶工程と、
所定の記録媒体を用いて、前記変更手段により前記高さを変更しながら、複数の高さそれぞれにおいて前記センサにより前記距離を検出した結果を表わす信号と前記高さとの関係を示す第2の距離情報を取得する取得工程と、
前記第1の距離情報と前記第2の距離情報とを比較して、該比較の結果に基づいて、前記メモリに格納された前記第1の距離情報を補正する補正工程とを有することを特徴とする校正方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015110798A JP6506626B2 (ja) | 2015-05-29 | 2015-05-29 | 記録装置及びその校正方法 |
| US15/151,983 US9676182B2 (en) | 2015-05-29 | 2016-05-11 | Printing apparatus and calibration method thereof |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015110798A JP6506626B2 (ja) | 2015-05-29 | 2015-05-29 | 記録装置及びその校正方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016221844A JP2016221844A (ja) | 2016-12-28 |
| JP2016221844A5 JP2016221844A5 (ja) | 2018-06-28 |
| JP6506626B2 true JP6506626B2 (ja) | 2019-04-24 |
Family
ID=57397027
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015110798A Expired - Fee Related JP6506626B2 (ja) | 2015-05-29 | 2015-05-29 | 記録装置及びその校正方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9676182B2 (ja) |
| JP (1) | JP6506626B2 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11415685B2 (en) | 2017-04-21 | 2022-08-16 | Hewlett-Packard Development Company, L.P. | Sensors calibration |
| JP7056296B2 (ja) * | 2018-03-26 | 2022-04-19 | 京セラドキュメントソリューションズ株式会社 | 画像形成装置 |
| JP7336216B2 (ja) * | 2019-03-11 | 2023-08-31 | キヤノン株式会社 | 画像記録装置、読取り装置、画像記録方法および記録媒体搬送方法 |
| DE102019208123A1 (de) * | 2019-06-04 | 2020-12-10 | Heidelberger Druckmaschinen Ag | Abstandsjustierung von Druckköpfen |
| JP2023515203A (ja) * | 2020-04-23 | 2023-04-12 | ヒューレット-パッカード デベロップメント カンパニー エル.ピー. | 印刷媒体とプリントヘッドとの間の距離を調整 |
| JP2022019361A (ja) | 2020-07-17 | 2022-01-27 | キヤノン株式会社 | 吐出装置 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2898863B2 (ja) * | 1992-10-19 | 1999-06-02 | 沖電気工業株式会社 | インパクトプリンタ |
| US6655778B2 (en) * | 2001-10-02 | 2003-12-02 | Hewlett-Packard Development Company, L.P. | Calibrating system for a compact optical sensor |
| JP3753126B2 (ja) * | 2002-11-29 | 2006-03-08 | ブラザー工業株式会社 | 媒体端部検出装置及び画像形成装置 |
| US7040733B2 (en) * | 2003-07-28 | 2006-05-09 | Colin Chee Chong Hin | Determining a position of an optical sensor associated with a printhead relative to a print media |
| JP2007062219A (ja) * | 2005-08-31 | 2007-03-15 | Canon Inc | 記録装置及び距離検出方法 |
| JP4478669B2 (ja) * | 2005-08-31 | 2010-06-09 | キヤノン株式会社 | センサおよびそれを用いた記録装置 |
| JP4757136B2 (ja) * | 2005-08-31 | 2011-08-24 | キヤノン株式会社 | 記録装置および制御方法 |
| JP2007331315A (ja) * | 2006-06-16 | 2007-12-27 | Canon Inc | インクジェット記録装置及びその制御方法 |
| JP2008065307A (ja) * | 2006-08-11 | 2008-03-21 | Canon Inc | 画像形成装置 |
| JP2008265058A (ja) | 2007-04-17 | 2008-11-06 | Canon Inc | インクジェット記録装置 |
| JP5806577B2 (ja) * | 2011-10-06 | 2015-11-10 | キヤノン株式会社 | 記録装置、制御方法及び計測装置 |
| JP2013146947A (ja) * | 2012-01-20 | 2013-08-01 | Canon Inc | インクジェット記録装置 |
| US8888212B2 (en) * | 2013-01-29 | 2014-11-18 | Hewlett-Packard Development Company, L.P. | Printhead spacing |
| JP6201860B2 (ja) * | 2014-03-28 | 2017-09-27 | ブラザー工業株式会社 | 液体吐出装置 |
-
2015
- 2015-05-29 JP JP2015110798A patent/JP6506626B2/ja not_active Expired - Fee Related
-
2016
- 2016-05-11 US US15/151,983 patent/US9676182B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US20160347053A1 (en) | 2016-12-01 |
| JP2016221844A (ja) | 2016-12-28 |
| US9676182B2 (en) | 2017-06-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6506626B2 (ja) | 記録装置及びその校正方法 | |
| US7798634B2 (en) | Recording apparatus and control method | |
| JP5333282B2 (ja) | 画像形成装置 | |
| JP3313119B2 (ja) | インク式画像形成装置 | |
| US6352332B1 (en) | Method and apparatus for printing zone print media edge detection | |
| US8104862B2 (en) | Method of evaluating performance of optical sensor and ink jet printing apparatus | |
| JP2007093586A (ja) | センサおよびそれを用いた記録装置 | |
| US9016820B2 (en) | Printing apparatus and control method thereof | |
| JP2007062222A (ja) | 記録装置及び記録媒体検出方法 | |
| JP5311973B2 (ja) | プリンタ | |
| CN110949003B (zh) | 液体喷射装置、液体喷射方法及存储介质 | |
| JP5806577B2 (ja) | 記録装置、制御方法及び計測装置 | |
| JP2009196752A (ja) | 画像形成装置 | |
| US11571888B2 (en) | Ejection apparatus and ejection speed acquisition method | |
| JP2010120219A (ja) | プリンタおよびプリンタのキャリブレーション方法 | |
| US8342630B2 (en) | Recording apparatus and recording position adjustment method | |
| JP2015202938A (ja) | シート判定方法およびプリント装置 | |
| JP4777111B2 (ja) | 搬送装置におけるシート材の検出方法、搬送装置 | |
| JP2013086366A (ja) | 記録装置及びその処理方法 | |
| JP2010221404A (ja) | インクジェット記録装置 | |
| US11840077B2 (en) | Ejection apparatus and ejection speed calculation method | |
| JP2005313497A (ja) | 記録装置および該装置用光センサのキャリブレーション方法 | |
| JP2014136314A (ja) | 印刷装置 | |
| JP2008265058A (ja) | インクジェット記録装置 | |
| JP2019081324A (ja) | インクジェット記録装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180514 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180514 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190128 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190301 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190329 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6506626 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |