JP6497786B2 - ソフトアクチュエータ本体及び適合スリーブを備えた機械的にプログラムされたアクチュエータ並びに機械的作動方法 - Google Patents
ソフトアクチュエータ本体及び適合スリーブを備えた機械的にプログラムされたアクチュエータ並びに機械的作動方法 Download PDFInfo
- Publication number
- JP6497786B2 JP6497786B2 JP2016523917A JP2016523917A JP6497786B2 JP 6497786 B2 JP6497786 B2 JP 6497786B2 JP 2016523917 A JP2016523917 A JP 2016523917A JP 2016523917 A JP2016523917 A JP 2016523917A JP 6497786 B2 JP6497786 B2 JP 6497786B2
- Authority
- JP
- Japan
- Prior art keywords
- sleeve
- actuator
- soft
- actuator body
- soft actuator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 12
- 238000005452 bending Methods 0.000 claims description 42
- 239000000463 material Substances 0.000 claims description 18
- 239000012530 fluid Substances 0.000 claims description 15
- 230000007246 mechanism Effects 0.000 claims description 12
- 230000001629 suppression Effects 0.000 claims description 12
- 229920001971 elastomer Polymers 0.000 claims description 4
- 230000008878 coupling Effects 0.000 claims description 3
- 238000010168 coupling process Methods 0.000 claims description 3
- 238000005859 coupling reaction Methods 0.000 claims description 3
- 229920001296 polysiloxane Polymers 0.000 claims description 3
- 229920002635 polyurethane Polymers 0.000 claims description 3
- 239000004814 polyurethane Substances 0.000 claims description 3
- 239000005060 rubber Substances 0.000 claims description 3
- 239000004698 Polyethylene Substances 0.000 claims description 2
- 239000004033 plastic Substances 0.000 claims description 2
- 229920003023 plastic Polymers 0.000 claims description 2
- -1 polyethylene Polymers 0.000 claims description 2
- 229920000573 polyethylene Polymers 0.000 claims description 2
- 229920002803 thermoplastic polyurethane Polymers 0.000 claims description 2
- 239000004848 polyfunctional curative Substances 0.000 claims 2
- 239000004677 Nylon Substances 0.000 claims 1
- 239000000806 elastomer Substances 0.000 claims 1
- 230000002401 inhibitory effect Effects 0.000 claims 1
- 229920001778 nylon Polymers 0.000 claims 1
- 239000000835 fiber Substances 0.000 description 17
- 230000033001 locomotion Effects 0.000 description 13
- 230000006870 function Effects 0.000 description 8
- 230000008859 change Effects 0.000 description 7
- 230000000694 effects Effects 0.000 description 5
- CWYNVVGOOAEACU-UHFFFAOYSA-N Fe2+ Chemical compound [Fe+2] CWYNVVGOOAEACU-UHFFFAOYSA-N 0.000 description 4
- 239000002184 metal Substances 0.000 description 4
- 230000008901 benefit Effects 0.000 description 3
- 238000013461 design Methods 0.000 description 3
- 238000010438 heat treatment Methods 0.000 description 3
- 230000010354 integration Effects 0.000 description 3
- 230000002093 peripheral effect Effects 0.000 description 3
- 241000282412 Homo Species 0.000 description 2
- 239000000853 adhesive Substances 0.000 description 2
- 230000001070 adhesive effect Effects 0.000 description 2
- 238000005520 cutting process Methods 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 210000003205 muscle Anatomy 0.000 description 2
- 238000005096 rolling process Methods 0.000 description 2
- 239000004593 Epoxy Substances 0.000 description 1
- 229920000271 Kevlar® Polymers 0.000 description 1
- 241001465754 Metazoa Species 0.000 description 1
- 208000027418 Wounds and injury Diseases 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000001154 acute effect Effects 0.000 description 1
- 239000000560 biocompatible material Substances 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 230000006378 damage Effects 0.000 description 1
- 230000007123 defense Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000005489 elastic deformation Effects 0.000 description 1
- 210000004177 elastic tissue Anatomy 0.000 description 1
- 239000013536 elastomeric material Substances 0.000 description 1
- 238000009429 electrical wiring Methods 0.000 description 1
- 239000004744 fabric Substances 0.000 description 1
- 239000003292 glue Substances 0.000 description 1
- 239000012535 impurity Substances 0.000 description 1
- 208000014674 injury Diseases 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 239000004761 kevlar Substances 0.000 description 1
- 230000000670 limiting effect Effects 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000036961 partial effect Effects 0.000 description 1
- 239000002245 particle Substances 0.000 description 1
- 229920000052 poly(p-xylylene) Polymers 0.000 description 1
- 229920000642 polymer Polymers 0.000 description 1
- 230000001737 promoting effect Effects 0.000 description 1
- 238000005086 pumping Methods 0.000 description 1
- 230000002829 reductive effect Effects 0.000 description 1
- 230000002787 reinforcement Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 230000000452 restraining effect Effects 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 238000009958 sewing Methods 0.000 description 1
- 210000004872 soft tissue Anatomy 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 229920002725 thermoplastic elastomer Polymers 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images








































































Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/0023—Gripper surfaces directly activated by a fluid
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/08—Gripping heads and other end effectors having finger members
- B25J15/12—Gripping heads and other end effectors having finger members with flexible finger members
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J18/00—Arms
- B25J18/06—Arms flexible
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/14—Programme-controlled manipulators characterised by positioning means for manipulator elements fluid
- B25J9/142—Programme-controlled manipulators characterised by positioning means for manipulator elements fluid comprising inflatable bodies
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B15/00—Fluid-actuated devices for displacing a member from one position to another; Gearing associated therewith
- F15B15/08—Characterised by the construction of the motor unit
- F15B15/10—Characterised by the construction of the motor unit the motor being of diaphragm type
- F15B15/103—Characterised by the construction of the motor unit the motor being of diaphragm type using inflatable bodies that contract when fluid pressure is applied, e.g. pneumatic artificial muscles or McKibben-type actuators
Description
本発明は、国防高等研究計画局(Defense Advanced Research Projects Agency)により与えられた助成番号W911NF−11−1−0094に基づく政府支援によりなされたものである。米国政府は、本発明において一定の権利を保有する。
Claims (21)
- 機械的にプログラムされたアクチュエータにおいて、
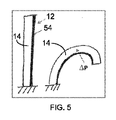
制限なしに作動させたときに、屈曲し、直線状に延び、収縮し、捻れ、またはそれらの組み合わせとなるように構成された少なくとも1つのソフトアクチュエータ本体と、
前記ソフトアクチュエータ本体を作動させるように構成された作動機構と、
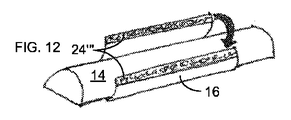
前記ソフトアクチュエータ本体の少なくとも一部分の周りに配置されるとともに、作動させたときにスリーブの内側で前記ソフトアクチュエータ本体を拘束しかつ前記ソフトアクチュエータ本体が前記スリーブで覆われていない場所で前記ソフトアクチュエータ本体が変形することを可能にするように構成された少なくとも1つのスリーブと
を備えており、
前記スリーブが、前記ソフトアクチュエータ本体が覆われない少なくとも1つの開口を規定する単一片の材料を備えており、
前記単一片の材料が、前記開口と反対側を前記ソフトアクチュエータ本体に沿って連続的に延在することを特徴とする機械的にプログラムされたアクチュエータ。 - 請求項1に記載の機械的にプログラムされたアクチュエータにおいて、前記ソフトアクチュエータ本体が内部室を画定し、かつ前記作動機構が、前記ソフトアクチュエータ本体を変形させるために前記内部室内に流体を圧送するように構成されたポンプを含むことを特徴とする機械的にプログラムされたアクチュエータ。
- 請求項2に記載の機械的にプログラムされたアクチュエータにおいて、前記ソフトアクチュエータ本体が、可撓性およびエラストマー性の少なくともいずれかである少なくとも1つの材料であって、超弾性シリコーン、熱可塑性ウレタン、熱可塑性エラストマー、ゴム、ナイロン、織布材料、不織布材料、弾性ポリウレタン、およびポリエチレンから選択される前記少なくとも1つの材料を含むことを特徴とする機械的にプログラムされたアクチュエータ。
- 請求項1に記載の機械的にプログラムされたアクチュエータにおいて、前記ソフトアクチュエータ本体が、前記ソフトアクチュエータ本体の側部に沿った歪み抑制層を含み、かつ前記ソフトアクチュエータ本体が、前記ソフトアクチュエータ本体の側部の膨張を抑えることにより前記ソフトアクチュエータ本体の屈曲をもたらすように構成されることを特徴とする機械的にプログラムされたアクチュエータ。
- 請求項1に記載の機械的にプログラムされたアクチュエータにおいて、複数のスリーブが前記ソフトアクチュエータ本体のそれぞれの部分の周りに配置され、前記スリーブの少なくとも1つが、(a)前記スリーブの別のスリーブと異なる組成を有し、かつ(b)前記スリーブが、前記スリーブの別のスリーブと異なる異方性機械的特性を有することを特徴とする機械的にプログラムされたアクチュエータ。
- 請求項5に記載の機械的にプログラムされたアクチュエータにおいて、前記スリーブの少なくとも2つの間に間隙が設けられ、前記ソフトアクチュエータ本体を前記スリーブ間の前記間隙において変形させることを特徴とする機械的にプログラムされたアクチュエータ。
- 請求項1に記載の機械的にプログラムされたアクチュエータにおいて、前記スリーブが開口を画定し、前記ソフトアクチュエータ本体を前記開口において変形させることを特徴とする機械的にプログラムされたアクチュエータ。
- 請求項1に記載の機械的にプログラムされたアクチュエータにおいて、前記スリーブが複数の開口を含み、前記ソフトアクチュエータ本体を前記開口において変形させることを特徴とする機械的にプログラムされたアクチュエータ。
- 請求項8に記載の機械的にプログラムされたアクチュエータにおいて、前記開口が、前記スリーブにおける異なる長手方向位置および径方向位置に画定されることを特徴とする機械的にプログラムされたアクチュエータ。
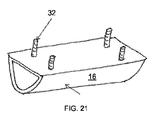
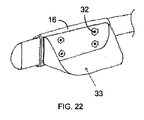
- 請求項1に記載の機械的にプログラムされたアクチュエータにおいて、前記スリーブが、電子機器、センサ、磁石、配索機構、および連結機構から選択されるインターフェースを含むことを特徴とする機械的にプログラムされたアクチュエータ。
- 請求項1に記載の機械的にプログラムされたアクチュエータにおいて、前記スリーブが、複数の前記ソフトアクチュエータ本体間の連結具としての役割を果たすことを特徴とする機械的にプログラムされたアクチュエータ。
- 請求項1に記載の機械的にプログラムされたアクチュエータにおいて、複数のスリーブが、互いに連結されるとともに、それぞれのソフトアクチュエータ本体の部分を収容することを特徴とする機械的にプログラムされたアクチュエータ。
- 請求項1に記載の機械的にプログラムされたアクチュエータにおいて、前記スリーブが、前記スリーブに収容される前記ソフトアクチュエータ本体の体積量を変化させるために調節可能な長さを有するように構成されることを特徴とする機械的にプログラムされたアクチュエータ。
- 請求項1に記載の機械的にプログラムされたアクチュエータにおいて、硬化材または硬化剤を用いて前記スリーブの少なくとも一部が剛性化されることを特徴とする機械的にプログラムされたアクチュエータ。
- 請求項1に記載の機械的にプログラムされたアクチュエータにおいて、前記スリーブが、剛性部分を前記ソフトアクチュエータ本体に固定することを特徴とする機械的にプログラムされたアクチュエータ。
- 請求項1に記載の機械的にプログラムされたアクチュエータにおいて、前記スリーブが取り外し可能であることを特徴とする機械的にプログラムされたアクチュエータ。
- 請求項1に記載の機械的にプログラムされたアクチュエータにおいて、前記ソフトアクチュエータ本体よりも高い剛性を有する少なくとも1つの要素が、前記ソフトアクチュエータ本体の変形を更に制御するために前記スリーブ上または前記スリーブの内側に配置されることを特徴とする機械的にプログラムされたアクチュエータ。
- 請求項1に記載の機械的にプログラムされたアクチュエータにおいて、前記アクチュエータが、前記ソフトアクチュエータ本体の周りに同心状に配置された内側スリーブと外側スリーブとを含み、間隙または開口が前記外側スリーブに設けられ、前記内側スリーブの一部を露出させることを特徴とする機械的にプログラムされたアクチュエータ。
- 機械的作動方法において、
室を画定する少なくとも1つのソフトアクチュエータ本体と、前記ソフトアクチュエータ本体の一部分の周りに配置された少なくとも1つのスリーブとを含む機械的にプログラムされたアクチュエータを使用するステップであって、前記スリーブが、前記ソフトアクチュエータ本体が覆われない少なくとも1つの開口を規定する単一片の材料を備えており、前記単一片の材料が、前記開口と反対側を前記ソフトアクチュエータ本体に沿って連続的に延在する、ステップと、
前記ソフトアクチュエータ本体により画定された室内に流体を圧送し、前記ソフトアクチュエータ本体が前記スリーブで覆われていない場所で前記ソフトアクチュエータ本体を変形させ、その一方で、前記スリーブが前記ソフトアクチュエータ本体を覆っている場所で前記スリーブが前記ソフトアクチュエータ本体の変形を抑制するステップと
を含むことを特徴とする方法。 - 請求項19に記載の方法において、前記アクチュエータが、少なくとも2つのソフトアクチュエータ本体を含み、各ソフトアクチュエータ本体が、各ソフトアクチュエータ本体の一部分の周りに配置された少なくとも1つのスリーブを備えることを特徴とする方法。
- 請求項20に記載の方法において、前記ソフトアクチュエータ本体間に物体を掴むように前記ソフトアクチュエータ本体を作動させるステップを更に含むことを特徴とする方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201361893093P | 2013-10-18 | 2013-10-18 | |
| US61/893,093 | 2013-10-18 | ||
| PCT/US2014/060870 WO2015102723A2 (en) | 2013-10-18 | 2014-10-16 | Mechanically programmed soft actuators with conforming sleeves |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017504489A JP2017504489A (ja) | 2017-02-09 |
| JP2017504489A5 JP2017504489A5 (ja) | 2017-09-14 |
| JP6497786B2 true JP6497786B2 (ja) | 2019-04-10 |
Family
ID=53494199
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016523917A Active JP6497786B2 (ja) | 2013-10-18 | 2014-10-16 | ソフトアクチュエータ本体及び適合スリーブを備えた機械的にプログラムされたアクチュエータ並びに機械的作動方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (2) | US9492930B2 (ja) |
| EP (1) | EP3058237B1 (ja) |
| JP (1) | JP6497786B2 (ja) |
| ES (1) | ES2856342T3 (ja) |
| WO (1) | WO2015102723A2 (ja) |
Families Citing this family (46)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6497786B2 (ja) * | 2013-10-18 | 2019-04-10 | プレジデント アンド フェローズ オブ ハーバード カレッジ | ソフトアクチュエータ本体及び適合スリーブを備えた機械的にプログラムされたアクチュエータ並びに機械的作動方法 |
| US10006444B2 (en) * | 2014-04-11 | 2018-06-26 | President And Fellows Of Harvard College | High throughput fabrication of soft machines |
| JP6483251B2 (ja) * | 2014-09-17 | 2019-03-13 | ソフト ロボティクス, インコーポレイテッド | ソフトロボットアクチュエータ取り付けハブアセンブリ |
| US10189168B2 (en) * | 2014-11-18 | 2019-01-29 | Soft Robotics, Inc. | Soft robotic actuator enhancements |
| DE102015004181A1 (de) * | 2015-04-02 | 2016-10-06 | Dieter Mankau | Aktuator |
| CN108025443B (zh) | 2015-04-23 | 2019-07-23 | 软机器人公司 | 机器人抓持器以及机器人结构 |
| US9802314B2 (en) | 2015-10-01 | 2017-10-31 | Disney Enterprises, Inc. | Soft body robot for physical interaction with humans |
| JP6929840B2 (ja) | 2015-10-31 | 2021-09-01 | チルドレンズ ナショナル メディカル センターChildren’S National Medical Center | 軟性処置具 |
| US10363670B1 (en) * | 2015-11-04 | 2019-07-30 | Ryan Gundling | Devices, systems, and methods for dynamic bending of inflatable structures |
| EP3243608B1 (de) * | 2016-05-09 | 2022-04-06 | J. Schmalz GmbH | Verfahren zur überwachung von funktionszuständen eines druckangetriebenen aktors und druckantreibbarer aktor |
| CA3025395A1 (en) * | 2016-05-25 | 2017-11-30 | Soft Robotics, Inc. | Soft robotic actuators for positioning, packaging, and assembling |
| JP6815631B2 (ja) * | 2016-12-20 | 2021-01-20 | 学校法人立命館 | ロボットハンド |
| WO2018183819A2 (en) * | 2017-03-30 | 2018-10-04 | Soft Robotics, Inc. | Servo-pneumatic control systems for soft robotic actuators |
| US10850406B2 (en) * | 2017-04-27 | 2020-12-01 | Massachusetts Institute Of Technology | Non-planar shearing auxetic structures, devices, and methods |
| LT6572B (lt) | 2017-04-28 | 2018-12-27 | Kauno technologijos universitetas | Straublio tipo roboto manipuliatorius su elektroreologine suspensija |
| CN107081744B (zh) * | 2017-05-22 | 2023-07-14 | 清华大学 | 伸缩软管流体欠驱动多关节机器人手指装置 |
| EP3631212A4 (en) * | 2017-05-31 | 2021-06-09 | President and Fellows of Harvard College | TEXTILE ACTUATORS |
| JP7081781B2 (ja) * | 2017-06-08 | 2022-06-07 | 国立大学法人東北大学 | 変形装置 |
| CN107184366B (zh) | 2017-07-07 | 2018-04-17 | 北京恒通信佳科技发展有限公司 | 一种手指关节康复器 |
| CN107184365B (zh) * | 2017-07-07 | 2019-04-05 | 北京恒通信佳科技发展有限公司 | 一种手指关节康复运动辅助件 |
| JP7112699B2 (ja) * | 2017-09-27 | 2022-08-04 | 学校法人立命館 | 空気圧アクチュエータ及び空気圧アクチュエータを備えたグリッパ |
| US11865702B2 (en) * | 2017-10-31 | 2024-01-09 | Worcester Polytechnic Institute | Robotic gripper member |
| JP7128618B2 (ja) * | 2017-11-07 | 2022-08-31 | 三井化学株式会社 | ロボットアーム及びこれに用いる多層フィルム又は多層シート |
| JP6750154B2 (ja) * | 2017-12-07 | 2020-09-02 | アダマンド並木精密宝石株式会社 | ロボットハンド |
| US11110597B2 (en) * | 2018-04-12 | 2021-09-07 | Arizona Board Of Regents On Behalf Of Arizona State University | Soft poly-limb systems |
| EP3563982A1 (de) * | 2018-05-04 | 2019-11-06 | J. Schmalz GmbH | Anbauanordnung zum anbau an elastisch verformbare sauggreifer und mechanischer aktor |
| CN109758333A (zh) * | 2018-05-09 | 2019-05-17 | 宋泽闻 | 一种辅助康复软体手 |
| US11382368B2 (en) * | 2018-06-18 | 2022-07-12 | Cornell University | Soft robotic fabrics and methods for same |
| KR102140691B1 (ko) * | 2018-10-04 | 2020-08-04 | 한국생산기술연구원 | 변형 억제층이 삽입된 소프트 액추에이터 및 이를 적용한 그리퍼 |
| CA3159545A1 (en) * | 2018-10-29 | 2020-05-07 | President And Fellows Of Harvard College | Composite actuator |
| US11597101B2 (en) * | 2018-12-17 | 2023-03-07 | Purdue Research Foundation | 3D-architected soft machines with topologically encoded actuation |
| US11338432B2 (en) * | 2019-03-06 | 2022-05-24 | Lintec Of America, Inc. | Bending muscle sleeve |
| US11510841B2 (en) | 2019-04-15 | 2022-11-29 | Jonathan Realmuto | Robotic forearm orthosis using soft fabric-based helical actuators |
| US11738893B2 (en) | 2019-04-30 | 2023-08-29 | Soft Robotics, Inc. | Picking, placing, and scanning bagged clothing and other articles |
| CN110076811A (zh) * | 2019-05-23 | 2019-08-02 | 五邑大学 | 一种刚柔耦合的接触力感应软体手指 |
| CN110125916B (zh) * | 2019-06-21 | 2022-05-10 | 重庆大学 | 仿生变色龙舌头执行器 |
| CA3047880A1 (en) | 2019-06-25 | 2020-12-25 | Run Ze R. Z. G. Gao | Air microfluidics and air minifluidics enabled active compression apparel |
| CN110394794A (zh) * | 2019-06-27 | 2019-11-01 | 西安工业大学 | 一种软体驱动装置 |
| JP7399396B2 (ja) | 2019-10-16 | 2023-12-18 | 国立大学法人東京工業大学 | アクチュエータ |
| PL433267A1 (pl) * | 2020-03-16 | 2021-09-20 | Rusiecka Stanisława Michalina Wit-Composites | Urządzenie montażowe |
| CN111590605A (zh) * | 2020-06-03 | 2020-08-28 | 浙江大学 | 一种变刚度柔性关节驱动机械臂 |
| CN111687869B (zh) * | 2020-06-16 | 2023-06-20 | 南京众智未来人工智能研究院有限公司 | 一种新型弯扭耦合的柔性夹爪 |
| CN112917514B (zh) * | 2021-01-20 | 2023-03-31 | 云南电网有限责任公司电力科学研究院 | 一种基于蛇形机器人的电缆温度检测装置 |
| US20230127106A1 (en) * | 2021-10-22 | 2023-04-27 | Daniel Aukes | Pinched tubes for reconfigurable robots |
| US11731268B2 (en) * | 2021-12-03 | 2023-08-22 | Korea Advanced Institute Of Science And Technology | Hyper elastic soft growing robot |
| CN114406997B (zh) * | 2022-01-25 | 2024-02-06 | 哈尔滨工业大学 | 顺序刚度调节仿生结构-感知一体化软折纸弯曲模块 |
Family Cites Families (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3343864A (en) * | 1965-10-07 | 1967-09-26 | James I Baer | Material handling apparatus and the like |
| US3601442A (en) * | 1970-01-26 | 1971-08-24 | Goodrich Co B F | Gripping device |
| US5021064A (en) * | 1982-06-03 | 1991-06-04 | Dolores R. Rudy | Robotic fluid-actuated muscle analogue |
| JP3226219B2 (ja) * | 1989-12-20 | 2001-11-05 | 株式会社東芝 | アクチュエータ |
| JP2801112B2 (ja) * | 1992-05-29 | 1998-09-21 | シーケーディ株式会社 | 形状可変アクチュエータ |
| WO2001072479A1 (fr) * | 2000-03-28 | 2001-10-04 | Seiko Epson Corporation | Actionneur flexible integre a une pompe |
| SK5432000A3 (en) * | 2000-04-13 | 2001-11-06 | Milan Kopacka | Method and device for the hollow fiber manipulation |
| DE10047220A1 (de) * | 2000-09-23 | 2002-04-11 | Univ Ilmenau Tech | Schlauchartige bewegliche Struktur mit stoffschlüssigen Gelenken |
| CA2330612A1 (en) * | 2000-12-29 | 2002-06-29 | Alain Bernier | Flexible actuator |
| US20020108491A1 (en) * | 2001-02-13 | 2002-08-15 | Stahn Kevin S. | Tension actuator having constraining sleeve immersed in a single layer of elastomeric material |
| US6772673B2 (en) * | 2001-12-13 | 2004-08-10 | Seiko Epson Corporation | Flexible actuator |
| CA2477306C (en) * | 2002-03-04 | 2011-05-03 | Prospective Concepts Ag | Pneumatic actuator |
| US7725175B2 (en) * | 2002-12-04 | 2010-05-25 | Kinetic Muscles, Inc. | System and method for neuromuscular reeducation |
| DE10316959A1 (de) * | 2003-04-12 | 2004-11-11 | Technische Universität Ilmenau Abteilung Forschungsförderung und Technologietransfer | Fluidisch angetriebenes stoffschlüssiges Gelenkelement |
| US7617762B1 (en) * | 2003-06-23 | 2009-11-17 | Gary Dean Ragner | Flexible hydraulic muscle |
| CN100346942C (zh) * | 2003-06-27 | 2007-11-07 | 松下电器产业株式会社 | 层积型多关节部驱动机构及其制造方法、设置有该机构的抓握手和机器人臂 |
| FI20050794L (fi) * | 2005-08-03 | 2007-02-04 | Iprbox Oy | Laitteita työliikkeiden aikaansaamiseksi |
| DE102007017417B4 (de) * | 2007-04-13 | 2011-06-30 | FESTO AG & Co. KG, 73734 | Aktuator |
| JP5280659B2 (ja) * | 2007-09-11 | 2013-09-04 | 新明和工業株式会社 | 弾性収縮体を備えたアクチュエータ、そのアクチュエータを備えた把持機構、および、その把持機構を備えたロボットハンド。 |
| JP2013523478A (ja) | 2010-04-15 | 2013-06-17 | コーネル・ユニバーシティー | グリッピングおよびリリーシングの装置および方法 |
| JP5957786B2 (ja) * | 2011-03-16 | 2016-07-27 | ダイヤ工業株式会社 | 手袋型パワーアシスト装置 |
| ITFI20110091A1 (it) * | 2011-05-03 | 2012-11-04 | Scuola Superiore Di Studi Universit Arie Di Perfe | Robot con arti morbidi adibiti a locomozione e presa |
| DE102011081727B4 (de) * | 2011-08-29 | 2015-03-19 | FWBI Friedrich-Wilhelm-Bessel-Institut Forschungsgesellschaft mit beschränkter Haftung | Fluidische Soft-Antriebselemente sowie Verfahren zu deren Herstellung |
| EP2764255B1 (en) * | 2011-10-07 | 2020-09-09 | President and Fellows of Harvard College | Systems and methods for actuating soft robotic actuators |
| EP2804721A1 (en) * | 2012-01-19 | 2014-11-26 | President and Fellows of Harvard College | Flexible robotic actuators |
| US9777753B2 (en) | 2013-04-19 | 2017-10-03 | Massachusetts Institute Of Technology | Methods and apparatus for shape control |
| WO2015050852A1 (en) | 2013-10-01 | 2015-04-09 | President And Fellows Of Harvard College | Manufacturing soft devices out of sheet materials |
| JP6497786B2 (ja) * | 2013-10-18 | 2019-04-10 | プレジデント アンド フェローズ オブ ハーバード カレッジ | ソフトアクチュエータ本体及び適合スリーブを備えた機械的にプログラムされたアクチュエータ並びに機械的作動方法 |
| US10184500B2 (en) | 2013-10-29 | 2019-01-22 | President And Fellows Of Harvard College | Multi-segment reinforced actuators and applications |
-
2014
- 2014-10-16 JP JP2016523917A patent/JP6497786B2/ja active Active
- 2014-10-16 US US15/028,993 patent/US9492930B2/en active Active
- 2014-10-16 ES ES14877529T patent/ES2856342T3/es active Active
- 2014-10-16 WO PCT/US2014/060870 patent/WO2015102723A2/en active Application Filing
- 2014-10-16 EP EP14877529.9A patent/EP3058237B1/en active Active
-
2016
- 2016-09-26 US US15/276,244 patent/US10189165B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| WO2015102723A3 (en) | 2015-10-29 |
| JP2017504489A (ja) | 2017-02-09 |
| US20170239818A1 (en) | 2017-08-24 |
| EP3058237A4 (en) | 2017-08-09 |
| EP3058237B1 (en) | 2020-12-02 |
| WO2015102723A2 (en) | 2015-07-09 |
| US10189165B2 (en) | 2019-01-29 |
| US9492930B2 (en) | 2016-11-15 |
| ES2856342T3 (es) | 2021-09-27 |
| EP3058237A2 (en) | 2016-08-24 |
| US20160263751A1 (en) | 2016-09-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6497786B2 (ja) | ソフトアクチュエータ本体及び適合スリーブを備えた機械的にプログラムされたアクチュエータ並びに機械的作動方法 | |
| US10788058B2 (en) | Multi-segment reinforced actuators and applications | |
| Yap et al. | A soft exoskeleton for hand assistive and rehabilitation application using pneumatic actuators with variable stiffness | |
| Kang et al. | Development of a polymer-based tendon-driven wearable robotic hand | |
| Naclerio et al. | Simple, low-hysteresis, foldable, fabric pneumatic artificial muscle | |
| US11918529B2 (en) | Fluid-driven actuator and its applications | |
| CN106456435B (zh) | 用于肢体康复的致动器装置、方法和系统 | |
| KR102096001B1 (ko) | 플렉스그립 | |
| Low et al. | Customizable soft pneumatic finger actuators for hand orthotic and prosthetic applications | |
| JP4564788B2 (ja) | 装着型パワーアシスト装置 | |
| JP2020522651A (ja) | 織物アクチュエータ | |
| JP6279143B2 (ja) | 関節運動アシスト装置及び当該関節運動アシスト装置の装着方法 | |
| JP6016453B2 (ja) | 三層の連結ばねスライド機構によるハンドエグゾスケルトン装置 | |
| Nassour et al. | High-performance perpendicularly-enfolded-textile actuators for soft wearable robots: design and realization | |
| Singh et al. | Design and analysis of coiled fiber reinforced soft pneumatic actuator | |
| Thompson et al. | Characterizing architectures of soft pneumatic actuators for a cable-driven shoulder exoskeleton | |
| US11034017B2 (en) | Soft actuators | |
| Wang et al. | Design and development of a skinny bidirectional soft glove for post-stroke hand rehabilitation | |
| Chatterjee et al. | A wearable soft pneumatic finger glove with antagonistic actuators for finger rehabilitation | |
| Allen et al. | Design of a highly-maneuverable pneumatic soft actuator driven by intrinsic SMA coils (PneuSMA actuator) | |
| WO2017199834A1 (ja) | 関節運動アシストシステム | |
| KR102417805B1 (ko) | 열수축형 인공근육을 적용한 손목 보조용 착용형 로봇 | |
| Nguyen | Design, Modeling, and Evaluation of Soft Poly-Limbs: Toward a New Paradigm of Wearable Continuum Robotic Manipulation for Daily Living Tasks | |
| JP6383107B2 (ja) | 関節運動アシストシステム | |
| Xinquan | Design and Development of Soft Robotic Arms Towards Close Human-Robot Interaction |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170630 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170804 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20170804 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20171013 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171024 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20180124 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180323 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180619 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20180918 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190212 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190308 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6497786 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |