JP6468893B2 - 画像形成装置 - Google Patents
画像形成装置 Download PDFInfo
- Publication number
- JP6468893B2 JP6468893B2 JP2015048166A JP2015048166A JP6468893B2 JP 6468893 B2 JP6468893 B2 JP 6468893B2 JP 2015048166 A JP2015048166 A JP 2015048166A JP 2015048166 A JP2015048166 A JP 2015048166A JP 6468893 B2 JP6468893 B2 JP 6468893B2
- Authority
- JP
- Japan
- Prior art keywords
- sheet
- paper
- unit
- timing
- time
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images










Description
図1(a)は、画像形成装置101の概略断面図である。給紙トレイ150内に積載された用紙Aは、給紙トレイ150から搬送路に向けて給紙されるときに、図中下方に降下して時計回り方向に回転する給紙ローラ152によって給送される。給紙トレイ150から給送された用紙Aは、搬送手段である搬送ローラ160と搬送対向ローラ161のニップ部に送られ、次いでベルト内ローラ105と転写ローラ122のニップ部(転写部、転写位置ともいう)へ送られる。給紙された用紙Aは、検知手段であるレジストセンサ162により検知できる。また、積載部である手差しトレイ170内に積載された用紙Bは、図中時計回り方向に回転する手差しトレイ170用の給紙手段である給紙ローラ171により搬送路に給送される。手差しトレイ170から給送された用紙Bは、搬送ローラ180a、180c、180eと搬送対向ローラ180b、180d、180fのニップ部に送られ、次いで搬送ローラ160と搬送対向ローラ161のニップ部に送られる。用紙Bは、用紙Aと同様に、ベルト内ローラ105と転写ローラ122のニップ部へ送られる。
図1(b)は本実施例の制御構成を示すブロック図である。プリンタコントローラ201は、ホストコンピュータ等の外部装置から入力される画像データをプリンタの印刷に必要なビットデータに展開する。制御手段であるエンジン制御部202は、プリンタの各部をプリンタコントローラ201の指示に従って制御するとともに、プリンタコントローラ201へプリンタの内部情報を報知する。エンジン制御部202は、画像間隔調整部210、搬送速度調整部211、連動給紙部212等によって時間を計測するために用いられるシステムタイマ203と、各計算結果を保存するために用いられるメモリ204と、を備えている。また、エンジン制御部202は、画像形成動作を制御するための画像制御部205と、給紙搬送動作を制御するための給紙搬送制御部206と、を備えている。
搬送速度調整部211は、中間転写ベルト130に転写されたトナー画像と用紙の先端を合わせるために、次のような制御を行っている。レジストセンサ162で用紙の先端を検知したタイミングで、搬送速度調整部211は、トナー画像と用紙がそれぞれ転写ローラ122に到達する時間からの時間差を求める。搬送速度調整部211は、用紙が転写ローラ122に到達する前の所定の位置に到達するまでに、トナー画像との時間差を解消するように、用紙を搬送する搬送ローラ180の回転速度を加速又は減速して、用紙を一旦停止させることなく搬送させている。以下、用紙が転写ローラ122に到達する前の所定の位置を、マージポイントという。マージポイントは、用紙にトナー像が転写される転写位置よりも用紙の搬送方向における上流側の所定の位置である。用紙がマージポイントに到達したときに上述した時間差が解消されている場合、用紙が転写ローラ122に到達したときに、トナー画像は転写されるべき用紙の位置に転写されることとなる。このため、以下の説明では、マージポイントまでに時間差が解消されていることを、マージポイントでトナー画像と用紙の先端が合致するという。
図3は、本実施例の搬送速度調整部211の制御を詳細に説明する図である。図3(a)は、レジストセンサ162に用紙の先端が到達したタイミング431が、理想のタイミング421より早い場合の図である。図3(b)は、レジストセンサ162に用紙の先端が到達したタイミング432が、理想のタイミング421より遅い場合の図である。また、各図の(i)はエンジン制御部202からプリンタコントローラ201に出力される/TOP信号を示し、タイミング401は画像形成が開始されたタイミングを示す。各図の(ii)は、給紙搬送制御部206から給紙ソレノイド226に出力される信号を示し、タイミング411は給紙ソレノイド226が駆動され、給紙が開始されるタイミングを示す。各図の(iii)は、用紙の搬送が理想的に行われている場合のレジストセンサ162から出力される信号を示し、タイミング421は給紙された用紙が搬送のばらつきなくレジストセンサ162に到達した理想のタイミング(理論値)を示す。理想のタイミング421で用紙の先端がレジストセンサ162に到達した場合、レジストセンサ162の位置から下流側の搬送路上では用紙の搬送速度を変更する必要がなく、用紙の先端を画像の先端に合わせることができる。各図の(iv)は、レジストセンサ162から出力される信号を示し、タイミング431及びタイミング432は、実際に搬送されている用紙の先端がレジストセンサ162によって検知されたタイミング(実測)を示している。また、タイミング402は、中間転写ベルト130上に形成された画像の先端がマージポイントに到達したタイミングを示す。いずれも横軸は時間を示す。更に、各図の(v)は、横軸に時間、縦軸に用紙の搬送速度を示す。
図3(a)を用いて、レジストセンサ162に用紙の先端が到達したタイミング431が、理想のタイミング421より早い場合の制御について説明する。/TOP信号が出力されたタイミング401から、トナー画像の先端(以下、画像先端という)がマージポイントに到達するタイミング402までの時間をt1とする。レジストセンサ162に用紙の先端が到達したタイミング431から、画像先端がマージポイントに到達するタイミング402までにシステムタイマ203によって計測された時間に基づき求められる実測時間をt2とする。/TOP信号が出力されたタイミング401から、理想のタイミング421までの時間をt3とする。
U1=U2より、以下の式(4)のように表せる。

図3(b)を用いて、レジストセンサ162に用紙の先端が到達したタイミング432が、理想のタイミング421より遅い場合の制御について説明する。/TOP信号が出力されたタイミング401から、画像先端がマージポイントに到達するタイミング402までの時間をt1とする。レジストセンサ162に用紙の先端が到達したタイミング432から、画像先端がマージポイントに到達するタイミング402までにシステムタイマ203によって計測された時間に基づき求められる実測時間をt2’とする。/TOP信号が出力されたタイミング401から、理想のタイミング421までの時間をt3とする。
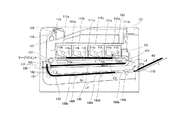
本実施例では、手差しトレイ170に積載された用紙を給紙する際の制御を示す。図4は手差しトレイ170において給紙動作と稼働音の関係を示した図である。図4(a)は、手差しトレイ170近傍の要部のみを示す図であり、手差しトレイ170上に載置された用紙Bを給紙する際に、給紙ソレノイド226を駆動したタイミング(図3のタイミング411)の状態を示す。図4(b)は、同様に手差しトレイ170近傍の要部のみを示す図であり、給紙ソレノイド226の駆動を開始した後、用紙Bと給紙ローラ171が当接したタイミングの状態を示す。
図5は、本実施例の搬送速度調整部211により給紙モータ224の速度を減速する際の中間転写ベルト130上のトナー画像と用紙の位置関係を説明する図である。尚、図5では説明上必要のない部材を省略している。レジストセンサ162とマージポイント間の搬送路に沿った距離を第一の区間であるL3とする。本実施例ではL3は、給紙ソレノイド226を駆動してから用紙Bが給紙ローラ171に当接するまでの最も遅いタイミングを距離に換算した最長移動距離L2よりも長い構成とする。
L5=L4+給紙搬送遅れ設定値・・・(25)
図6は、本実施例の搬送速度調整部211及び連動給紙部212の制御を示すタイミングチャートである。図6(i)〜図6(v)は、図3(a)の(i)〜(v)に対応しており、図3(a)と同じ説明は省略する。エンジン制御部202は、タイミング501で1枚目の用紙B1にトナー画像C1を転写するための画像形成を開始し、タイミング511で給紙ソレノイド226を駆動して手差しトレイ170から1枚目の用紙B1を給紙する。エンジン制御部202は、タイミング501から時間t4が経過したタイミング502で、2枚目の用紙B2にトナー画像C2を転写するための画像形成を開始する。搬送速度調整部211は、1枚目の用紙B1がレジストセンサ162に到達したタイミング531で、時間t2を取得し、上述したように、式(1)からΔtを、式(11)からVdownを、式(12)からTdownを、それぞれ算出する。また、立ち下げ時間Ta、立ち上げ時間Tbは、式(7)により表されるものとする。
図7は、本実施例の搬送速度調整部211及び連動給紙部212の処理を示すフローチャートである。エンジン制御部202は、プリンタコントローラ201に/TOP信号を出力し、以下の処理を開始する。尚、エンジン制御部202は、システムタイマ203による時間の計測も開始する。ステップ(以下、Sとする)102でエンジン制御部202は、給紙搬送制御部206により給紙ソレノイド226を駆動することにより1枚目の用紙B1の給紙を行う(図6 タイミング511)。S103でエンジン制御部202は、レジストセンサ162に用紙が到達したか否か、即ち、レジストセンサ162により用紙B1の先端を検知したか否かを判断する。尚、レジストセンサ162が用紙を検知しているときをオン、用紙を検知していないときをオフとする。
図8は、本実施例の搬送速度調整部211及び連動給紙部212を示すタイミングチャートである。図8の600はエンジン制御部202がプリンタコントローラ201に出力する/TOP信号を示す図、610は給紙搬送制御部206が給紙ソレノイド226を駆動するために出力する信号を示す図である。また、図8(a)、図8(b)において、620はレジストセンサ162から出力される信号(理論値)を示す。600、610、620の横軸はいずれも時間を示す。また、図8(a)、図8(b)におけるグラフは、横軸に時間、縦軸に用紙の搬送速度(単に、速度と記す)を示す。
図9は、本実施例の搬送速度調整部211及び連動給紙部212の処理を示すフローチャートである。尚、S202、S203の処理は、実施例1の図7で説明したS102、S103の処理と同様であり、説明を省略する。1枚目の用紙がレジストセンサ162に到着すると、S204でエンジン制御部202は、システムタイマ203を参照することにより時間t2を取得し、搬送速度調整部211により、式(29)からΔTup2を、式(28)からTdown2を算出する。S205でエンジン制御部202は、搬送速度調整部211により、式(30)からVup2を、式(31)からTup2を、式(19)からTc2、Td2を算出する。S206でエンジン制御部202は、給紙ソレノイド226を駆動させ、2枚目の給紙を行い、搬送速度調整部211により給紙モータ224の速度をVpreからVup2に変更する。尚、タイミング612で給紙ソレノイド226の駆動を開始しても、用紙が給紙ローラ171に当接するまでには、最速でも最短移動距離L1に応じた時間が必要であり、搬送速度を加速している間に用紙が給紙ローラ171に当接することがない。S207でエンジン制御部202は、システムタイマ203を参照することにより、S206で給紙モータ224の速度の変更を開始してから立ち上げ時間Tc2が経過したか否かを判断する。
図10(a)は、本実施例の制御構成を示すブロック図であり、給紙搬送制御部206は、レジストセンサ到達予測部(以下、単に到達予測部という)280を備えている。本実施例では、到達予測部280は、給紙搬送制御部206が給紙ソレノイド226を駆動した後に1枚目の用紙がレジストセンサ162に到達するタイミングを予測する。そして、連動給紙部212は、到達予測部280により予測されたタイミングに基づいて、1枚目の用紙がレジストセンサ162に到達する前に2枚目の給紙動作を行う。給紙ソレノイド226が駆動されたタイミングからレジストセンサ162に到達するまでの時間t5をシステムタイマ203により予め計測しておき、メモリ204に記憶しておく。メモリ204に記憶された情報は、次の到達予測部280による予測に用いることができる。このため、時間t5は、予測時間t5ともいえる。実際に給紙ソレノイド226が駆動されてから、用紙がレジストセンサ162に到達するまでの時間は、用紙の厚みや給紙ローラ171、搬送ローラ180の摩耗等によって変化するため、実際に測定した時間に基づいて予測時間t5を更新する。
図10(b)は、本実施例の搬送速度調整部211及び連動給紙部212の処理を示すタイミングチャートである。図10(b)(i)〜図10(b)(v)は、図6(i)〜図6(v)に対応しており、同一の説明を省略する。タイミング701で1枚目の用紙への画像形成を開始し、タイミング711で給紙ソレノイド226を駆動して1枚目の用紙を給紙する。タイミング702で2枚目の用紙への画像形成を開始する。到達予測部280により予め算出した時間t6を用い、タイミング712で、給紙ソレノイド226を駆動する。これにより、給紙カム機構231が動作し、手差しトレイ170に積載された2枚目の用紙を給紙する。1枚目の用紙がレジストセンサ162に到達したタイミング731で、搬送速度調整部211は時間t2を取得し、Δt、Vdown、Ta、Tb、Tdownを算出し、給紙モータ224の速度をVdownに変更する。給紙モータ224が搬送速度Vdownに減速していることにより、用紙が給紙ローラ171に当接するときの衝突音を低減させることができる。タイミング741で給紙モータ224の速度をVdownからVpreに戻す。1枚目の用紙はタイミング703でマージポイントに到達し、用紙に画像を転写させる。尚、721は、1枚目の用紙が理想のタイミングでレジストセンサ162に到達したタイミングである。
図11は、本実施例の搬送速度調整部211及び連動給紙部212の処理を示すフローチャートである。S302の処理は、実施例1の図7のS102と同様であり説明を省略する。S303でエンジン制御部202は、システムタイマ203を参照することにより、S302で給紙ソレノイド226を駆動したタイミング(図10(b) タイミング711)から時間t6が経過したか否かを判断する。尚、エンジン制御部202は、到達予測部280によりメモリ204の時間t5を読み出し、式(32)から時間t6を算出する。S303でエンジン制御部202は、時間t6が経過していないと判断した場合、S303の処理を繰り返し、時間t6が経過したと判断した場合、S304の処理に進む。
162 レジストセンサ
171 給紙ローラ
202 エンジン制御部
226 給紙ソレノイド
Claims (11)
- 積載部に積載された用紙と、用紙を給紙する給紙手段を当接させる当接手段と、
前記給紙手段により給紙された用紙をトナー像が転写される転写位置へ搬送する搬送手段と、
前記搬送手段により搬送されている用紙を検知する検知手段と、
前記検知手段により用紙を検知したタイミングに基づいて用紙の搬送を制御する制御手段と、
を備え、前記当接手段と前記搬送手段を同一の駆動源により駆動する画像形成装置であって、
前記制御手段は、前記検知手段から用紙の搬送方向において前記転写位置よりも上流側の所定の位置までの第一の区間において、前記搬送手段により搬送されている第一の用紙の搬送速度を所定の速度よりも遅くする第二の区間を設け、前記第二の区間に相当する時間において前記積載部に積載された第二の用紙と前記給紙手段が当接するように前記当接手段の駆動を制御することを特徴とする画像形成装置。 - 前記制御手段は、前記検知手段により前記第一の用紙の到達を検知すると、前記当接手段の駆動を開始することを特徴とする請求項1に記載の画像形成装置。
- 前記第一の区間の距離は、前記当接手段の駆動を開始してから前記第二の用紙が前記給紙手段に当接されるまでに用紙が移動する距離よりも長いことを特徴とする請求項2に記載の画像形成装置。
- 前記制御手段は、前記第一の用紙が前記検知手段に到達する前に、前記当接手段の駆動を開始することを特徴とする請求項1に記載の画像形成装置。
- 前記制御手段は、前記第一の用紙を給紙するために前記当接手段の駆動を開始してから前記第一の用紙が前記検知手段に到達するまでの時間を予め計測し、予め計測した時間に基づいて、前記第二の用紙を給紙するために前記当接手段の駆動を開始することを特徴とする請求項4に記載の画像形成装置。
- 前記第一の区間の距離は、前記当接手段の駆動を開始してから前記第二の用紙が前記給紙手段に当接されるまでに用紙が移動する距離よりも短いことを特徴とする請求項4又は5に記載の画像形成装置。
- 前記制御手段は、前記検知手段により検知した前記第一の用紙の到達のタイミングが所定のタイミングよりも遅い場合、又は、前記所定のタイミングであった場合には、前記第一の区間において、前記搬送手段により搬送されている前記第一の用紙の搬送速度を前記所定の速度よりも速くする第三の区間を設けることを特徴とする請求項1乃至6のいずれか1項に記載の画像形成装置。
- 前記第一の用紙に転写される第一のトナー像の先端から前記第二の用紙に転写される第二のトナー像の先端までの距離は、前記検知手段と前記給紙手段との間の距離よりも長いことを特徴とする請求項1乃至7のいずれか1項に記載の画像形成装置。
- 前記積載部に積載される用紙の搬送方向の長さは、前記検知手段と前記給紙手段との間の距離よりも短いことを特徴とする請求項1乃至8のいずれか1項に記載の画像形成装置。
- 前記制御手段は、前記第一の用紙が前記所定の位置に到達するまでに、前記第一の用紙の搬送速度を前記所定の速度に戻すことを特徴とする請求項1乃至9のいずれか1項に記載の画像形成装置。
- 前記所定の速度は、用紙にトナー像が転写される際の速度であることを特徴とする請求項1乃至10のいずれか1項に記載の画像形成装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015048166A JP6468893B2 (ja) | 2015-03-11 | 2015-03-11 | 画像形成装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015048166A JP6468893B2 (ja) | 2015-03-11 | 2015-03-11 | 画像形成装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016169057A JP2016169057A (ja) | 2016-09-23 |
| JP2016169057A5 JP2016169057A5 (ja) | 2018-04-19 |
| JP6468893B2 true JP6468893B2 (ja) | 2019-02-13 |
Family
ID=56982061
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015048166A Active JP6468893B2 (ja) | 2015-03-11 | 2015-03-11 | 画像形成装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6468893B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020093892A (ja) * | 2018-12-12 | 2020-06-18 | 京セラドキュメントソリューションズ株式会社 | 画像形成装置、及び画像形成方法 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007099459A (ja) * | 2005-10-05 | 2007-04-19 | Seiko Epson Corp | 給紙装置およびプリンタ |
| JP2008013297A (ja) * | 2006-07-05 | 2008-01-24 | Ricoh Co Ltd | 給紙装置および画像形成装置 |
| JP5235474B2 (ja) * | 2007-04-20 | 2013-07-10 | キヤノン株式会社 | 画像形成装置 |
| JP2009045913A (ja) * | 2007-08-23 | 2009-03-05 | Seiko Epson Corp | プリンタおよび用紙搬送方法 |
| JP5900775B2 (ja) * | 2012-08-23 | 2016-04-06 | キヤノン株式会社 | 画像形成装置 |
| JP2014169166A (ja) * | 2013-03-05 | 2014-09-18 | Canon Inc | 画像形成装置 |
-
2015
- 2015-03-11 JP JP2015048166A patent/JP6468893B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016169057A (ja) | 2016-09-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9182722B2 (en) | Image forming system and control method for the same | |
| US10035673B2 (en) | Image forming apparatus for forming image on conveyed sheet | |
| JP4898518B2 (ja) | シート搬送装置、画像形成装置及び画像読取装置 | |
| US10640313B2 (en) | Image forming apparatus | |
| US20120146281A1 (en) | Sheet feeding device, control method for the sheet feeding device, and image forming apparatus incorporating the sheet feeding device | |
| US9195196B2 (en) | Image forming apparatus | |
| US10579001B2 (en) | Image forming apparatus able to form images on both sides of sheet | |
| US20160079897A1 (en) | Motor drive control device, motor drive control method, and non-transitory computer-readable medium | |
| JP6802647B2 (ja) | 画像形成装置およびシート搬送装置 | |
| US10321006B2 (en) | Document reading device and image forming device | |
| US9602690B2 (en) | Image forming system, image forming apparatus and post processing apparatus | |
| JP6468893B2 (ja) | 画像形成装置 | |
| JP2008287236A (ja) | 画像形成装置 | |
| US9676575B2 (en) | Image forming apparatus | |
| JP4549305B2 (ja) | 画像形成システム、シート搬送装置、画像形成装置およびその制御方法 | |
| US20220239794A1 (en) | Technique for cooperation between plurality of separate controllers provided in image forming apparatus | |
| US11150586B2 (en) | Image forming system | |
| JP5953826B2 (ja) | 画像形成装置および画像形成装置の制御方法 | |
| US10534302B2 (en) | Image forming apparatus | |
| JP2008225102A (ja) | 画像形成装置及び制御方法 | |
| JP6562668B2 (ja) | シート搬送装置及び画像形成装置 | |
| JP7476252B2 (ja) | 画像形成装置 | |
| JP4541725B2 (ja) | 画像形成装置 | |
| JP2015210391A (ja) | 画像形成装置及びその制御方法 | |
| JP6173096B2 (ja) | 画像形成装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20171201 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180307 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180307 |
|
| TRDD | Decision of grant or rejection written | ||
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181213 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181218 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190115 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6468893 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |