JP6444729B2 - Ncプログラムによる高速なシーケンス制御を有する数値制御装置 - Google Patents
Ncプログラムによる高速なシーケンス制御を有する数値制御装置 Download PDFInfo
- Publication number
- JP6444729B2 JP6444729B2 JP2014263101A JP2014263101A JP6444729B2 JP 6444729 B2 JP6444729 B2 JP 6444729B2 JP 2014263101 A JP2014263101 A JP 2014263101A JP 2014263101 A JP2014263101 A JP 2014263101A JP 6444729 B2 JP6444729 B2 JP 6444729B2
- Authority
- JP
- Japan
- Prior art keywords
- control
- program
- signal
- sequencer
- sequence control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Description
図7は、従来技術のシーケンサ制御用プログラムを使用したシーケンス制御の流れを説明する図である。図において、数値制御装置10は該数値制御装置10が備えた各種機能を処理する各種機能処理部11を備えており、シーケンサ20とはシーケンサインターフェース12を介して接続されている。また、シーケンサ20は、シーケンサ制御用プログラムを処理するシーケンサ制御プログラム処理部21を備えている。数値制御装置10とシーケンサ20、シーケンサ20と周辺機器30との間はそれぞれ信号をやり取りすることで制御できるように構成されている。
本発明の一実施の形態における数値制御装置10では、数値制御装置10の各種機能を信号で制御する場合、従来技術において行われているシーケンス制御用のプログラムを用いたシーケンサによる信号制御(図において、信号の入出力A)に加え、数値制御装置10内にNCプログラム形式シーケンス制御処理部13を設け、NCプログラム形式シーケンス制御処理部13においてNCプログラムが処理されることによりNCプログラムの記述に従って信号制御(図において、信号の入出力B)が為される。
数値制御装置10とシーケンサ20は一定の制御周期毎に信号の更新処理を行なう。シーケンサ20のG信号を数値制御装置10内のバッファ領域に書き込み、数値制御装置10内のバッファ領域で更新されたF信号をシーケンサへ書き込む。各種機能処理部11はこのバッファ領域のG、F信号の読み取り、書き込みを行なって所望の機能を実現している。
(1)プログラムの自動運転機能
プログラムの自動運転を制御する機能である。本機能を用いてプログラムを実行するには、自動運転起動信号(G信号)を入力する必要がある。この入力により実行対象となるNCプログラムを解析して、サーボモータを駆動する一連の動作が実行される。NCプログラムの運転を開始したことは自動運転起動中信号(F信号)として出力される。
(2)リトラクト機能
プログラム運転中に工具破損等が発生した場合に工具を退避させる機能である。G信号が入力されると、工具が退避する方向にサーボモータが駆動し、退避動作が完了するとF信号を出力する。
(3)オーバライド機能
NCプログラムはプログラム指令された送り速度に対して倍率をかける(オーバライドする)機能である。通常、NCプログラムはプログラム指令された送り速度に従ってサーボモータを駆動させるが、本機能を用いて送り速度に対してG信号で倍率をかけることができる。G信号でパーセント単位のデータを設定し、その倍率をプログラム指令の送り速度に乗じた送り速度に変更することができる。
●[ステップSA01]NCプログラムをメモリ(図示せず)から読み出し、NCプログラム形式のシーケンス制御指令が含まれているか否かを判定する。NCプログラム形式のシーケンス制御指令は、特許文献1に開示されるように、例えば「//」のような識別子により通常のNCプログラムの指令とは区別できるように記載されており、本処理ではそのような識別子を読み取ることでNCプログラム形式のシーケンス制御指令が含まれているか否かを判別する。NCプログラム形式のシーケンス制御指令が含まれている場合にはステップSA02へ進み、記載されていない場合には本処理を終了する。
●[ステップSA03]ステップSA02で作成した実行データにG,F信号が含まれているか判定する。含まれている場合にはステップSA04へ進み、含まれていない場合にはステップSA05へ進む。
●[ステップSA04]ステップSA02で作成した実行データにG,F信号が含まれている場合、当該命令に含まれる信号はシーケンサへ出力する必要が無いので、当該命令に従って数値制御装置内でのシーケンス制御を実行する。
●[ステップSA06]1命令毎に実行データが継続するか判定する。実行データが終了している場合には本処理を終了し、次の命令がある場合にはステップSA03へ戻り処理を繰り返す。
●[ステップSB01]シーケンサ20から転送されてきた数値制御装置10内で使用するG信号をバッファ領域に書き込みを行なう。シーケンサからのG信号を書き込む際には、特定の領域(G信号のマスクデータに従うマスク領域)にあたるG信号についてはゼロクリアされる。G信号のマスクデータは予め数値制御装置10内のシーケンス制御で使用する信号に対して設定しておき、シーケンサ20から送られてくるG信号と数値制御装置10内で生成されるG信号との競合を防止する。
●[ステップSB02]実行データにG信号の命令が含まれるか判定する。G信号の命令が含まれている場合にはステップSB03へ進み、そうでない場合にはステップSB04へ進む。
●[ステップSB03]G信号の命令に従って、バッファ領域に対してG信号の書き込み又は読み取りの実行処理を行なう。
●[ステップSB04]バッファ領域に書き込まれたG信号を各種機能処理部11が読取り、当該信号に従って数値制御装置10の各種機能が動作する。
●[ステップSB06]実行データにF信号の命令が含まれるか判定する。F信号の命令が含まれている場合にはステップSB07へ進み、そうでない場合にはステップSB08へ進む。
●[ステップSB07]F信号の命令に従って、バッファ領域からF信号の読み取りの実行処理を行なう。
●[ステップSB08]バッファ領域に書き込まれたF信号をシーケンサ20へ転送する。
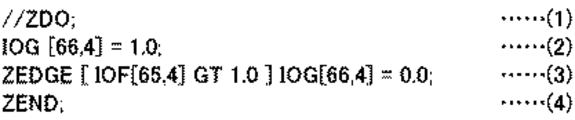
図6において、(1)の「//」はNCプログラム形式のシーケンス制御であることを表し、(1)のZDOから(4)のZENDまでがプログラム範囲であることを表している。(2)はG信号の入力命令で、G信号の[66,4]に1.0の書き込みを指令している。
なお、本実施の形態におけるNCプログラムの構文の詳細については、一般的なNCプログラムの構文、および特許文献1などの従来技術に従うものであるから、本明細書での説明は省略する。
11 各種機能処理部
12 シーケンサインターフェース
13 NCプログラム形式シーケンス制御処理部
20 シーケンサ
21 シーケンサ制御プログラム処理部
30 周辺機器
Claims (2)
- NCプログラム形式で作成された制御プログラムに従って工作機械のシーケンス制御を行う数値制御装置において、
シーケンサとの間で制御信号の入出力を行うシーケンサインターフェースと、
前記数値制御装置が備えた各種機能を処理する各種機能処理部と、
前記制御プログラムを解析し、該制御プログラムの記述に従って制御信号の信号制御を行うNCプログラム形式シーケンス制御処理部と、
を備え、
前記シーケンサインターフェースと前記NCプログラム形式シーケンス制御処理部とは同一の制御周期で動作しており、
前記各種機能処理部は前記シーケンサインターフェースを介して入力される制御信号に従って前記各種機能を処理すると共に、前記各種機能の動作に従って前記シーケンサインターフェースに対して制御信号を出力し、
前記NCプログラム形式シーケンス制御処理部は、前記制御プログラムの記述に従って前記シーケンサインターフェースとの間で制御信号の信号制御を行う、
ことを特徴とする数値制御装置。 - 前記NCプログラム形式シーケンス制御処理部は、前記各種機能処理部を制御する制御信号と、前記工作機械が制御する周辺機器を制御する制御信号とを生成し、前記工作機械が制御する周辺機器を制御する制御信号は前記シーケンサを介して前記周辺機器との間で入出力される、
ことを特徴とする請求項1に記載の数値制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014263101A JP6444729B2 (ja) | 2014-12-25 | 2014-12-25 | Ncプログラムによる高速なシーケンス制御を有する数値制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014263101A JP6444729B2 (ja) | 2014-12-25 | 2014-12-25 | Ncプログラムによる高速なシーケンス制御を有する数値制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016122400A JP2016122400A (ja) | 2016-07-07 |
| JP6444729B2 true JP6444729B2 (ja) | 2018-12-26 |
Family
ID=56329007
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014263101A Active JP6444729B2 (ja) | 2014-12-25 | 2014-12-25 | Ncプログラムによる高速なシーケンス制御を有する数値制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6444729B2 (ja) |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3764436B2 (ja) * | 2003-04-11 | 2006-04-05 | ファナック株式会社 | 機械の制御装置 |
-
2014
- 2014-12-25 JP JP2014263101A patent/JP6444729B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016122400A (ja) | 2016-07-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5172990B2 (ja) | テーブル形式データによる運転機能を備えた数値制御装置 | |
| JP6382865B2 (ja) | 加工時間予測装置 | |
| JP5813058B2 (ja) | 複合形固定サイクルの開始点経路短縮機能を有する数値制御装置 | |
| JP6203691B2 (ja) | 複数軸の軸制御処理を分散して実行可能な数値制御装置 | |
| JP5792254B2 (ja) | 休止点が指定可能な数値制御装置 | |
| JP6068401B2 (ja) | 加工プログラムの読み出し時間に左右されないdnc運転手段を備えた数値制御装置 | |
| JP5715189B2 (ja) | オーバライドの変化時に送り速度を円滑に変更する機能を有する数値制御装置 | |
| JP6017509B2 (ja) | 運転停止時に送り速度を円滑に変更する数値制御装置 | |
| JP6046102B2 (ja) | 高速応答の軸制御系統を持つ多系統数値制御装置 | |
| JP2021002092A (ja) | 数値制御装置 | |
| JP6077601B2 (ja) | 加工プログラムのサイクルタイムを短縮する数値制御装置 | |
| JP5210070B2 (ja) | 数値制御工作機械 | |
| JP6444729B2 (ja) | Ncプログラムによる高速なシーケンス制御を有する数値制御装置 | |
| JP5752213B2 (ja) | テーブル形式データで複数の指令を同時に実行する機能を備えた数値制御装置 | |
| JP3945507B2 (ja) | 数値制御装置 | |
| JP6309927B2 (ja) | Ncプログラム運転と連動した関連信号の自動トレース機能を有する数値制御装置 | |
| US11320800B2 (en) | Optimization device | |
| JP6121981B2 (ja) | 加工時に使用した変数値を埋め込んだ変数確認用ncプログラムの作成機能を備えた数値制御装置 | |
| JP6777618B2 (ja) | 数値制御装置、数値制御方法及び数値制御プログラム | |
| JP2002328711A (ja) | 数値制御方法及びその装置 | |
| CN105446267A (zh) | 数值控制装置 | |
| JP6046099B2 (ja) | 高速応答制御を備えた数値制御装置 | |
| JP6396275B2 (ja) | テーブル形式データによる運転のオーバラップを行う数値制御装置 | |
| JP2007310499A (ja) | 数値制御装置 | |
| WO2022244072A1 (ja) | 数値制御装置及びコンピュータ読み取り可能な記憶媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170420 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180403 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180530 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181106 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181128 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6444729 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |