JP6438219B2 - ステージ装置、リソグラフィ装置、物品の製造方法、および決定方法 - Google Patents
ステージ装置、リソグラフィ装置、物品の製造方法、および決定方法 Download PDFInfo
- Publication number
- JP6438219B2 JP6438219B2 JP2014124684A JP2014124684A JP6438219B2 JP 6438219 B2 JP6438219 B2 JP 6438219B2 JP 2014124684 A JP2014124684 A JP 2014124684A JP 2014124684 A JP2014124684 A JP 2014124684A JP 6438219 B2 JP6438219 B2 JP 6438219B2
- Authority
- JP
- Japan
- Prior art keywords
- stage
- signal
- control unit
- vibration
- substrate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images










Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70691—Handling of masks or workpieces
- G03F7/70716—Stages
- G03F7/70725—Stages control
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70691—Handling of masks or workpieces
- G03F7/70758—Drive means, e.g. actuators, motors for long- or short-stroke modules or fine or coarse driving
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70691—Handling of masks or workpieces
- G03F7/70775—Position control, e.g. interferometers or encoders for determining the stage position
Landscapes
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
- Control Of Position Or Direction (AREA)
- Control Of Linear Motors (AREA)
Description
本発明の第1実施形態のステージ装置100について、図1を参照しながら説明する。図1は、第1実施形態のステージ装置100を示す概略図である。第1実施形態のステージ装置100は、移動可能なステージ11と、ステージ11を駆動する駆動部12と、ステージ11の位置を計測する計測部13と、制御部15とを含みうる。制御部15は、例えばCPUやメモリなどを含み、ステージ装置100の各部を制御する。ここで、第1実施形態では、説明を簡単にするため、Y方向におけるステージ11の位置を制御する方法について説明するが、X方向においても同様の構成でステージ11の位置を制御することができる。

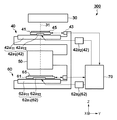
本発明の第2実施形態のステージ装置200について、図7を参照しながら説明する。図7は、第2実施形態のステージ装置200を示す概略図である。第2実施形態のステージ装置200は、Y方向におけるステージの位置だけでなく、θ方向(Z軸周りの回転方向)におけるステージの位置(回転)も制御するように構成されている。第2実施形態のステージ装置200は、定盤24上を移動可能なステージ21と、ステージ21を駆動する駆動部22と、ステージ21の位置を計測する計測部23と、制御部25とを含みうる。制御部25は、第1実施形態の制御部15と同様に、例えばCPUやメモリなどを含み、ステージ装置200の各部を制御する。ここで、第2実施形態では、説明を簡単にするため、Y方向およびθ方向におけるステージ21の位置を制御する方法について説明するが、X方向においても同様の方法でステージ21の位置を制御することができる。
基板にパターンを形成するリソグラフィ装置において、上述のステージ装置を適用する例について説明する。リソグラフィ装置は、例えば、基板を露光してマスクのパターンを基板に転写する露光装置や、基板上のインプリント材をモールドを用いて成形するインプリント装置、荷電粒子線を基板に照射して基板にパターンを形成する描画装置を含みうる。露光装置においては、マスクおよび基板の少なくとも一方を保持するステージの位置を制御するために上述のステージ装置が用いられうる。インプリント装置においては、モールドおよび基板の少なくとも一方を保持するステージの位置を制御するために上述のステージ装置が用いられうる。また、描画装置においては、基板を保持するステージの位置を制御するために上述のステージ装置が用いられうる。以下では、露光装置において上述のステージ装置を用いる例について説明する。
本発明の実施形態における物品の製造方法は、例えば、半導体デバイス等のマイクロデバイスや微細構造を有する素子等の物品を製造するのに好適である。本実施形態の物品の製造方法は、上記のリソグラフィ装置(露光装置)を用いて基板にパターンを形成する工程(基板を露光する工程)と、かかる工程でパターンが形成された基板を加工(例えば現像)する工程とを含む。更に、かかる製造方法は、他の周知の工程(酸化、成膜、蒸着、ドーピング、平坦化、エッチング、レジスト剥離、ダイシング、ボンディング、パッケージング等)を含む。本実施形態の物品の製造方法は、従来の方法に比べて、物品の性能・品質・生産性・生産コストの少なくとも1つにおいて有利である。
Claims (13)
- 移動可能なステージを含むステージ装置であって、
前記ステージに推力を与えることにより前記ステージを所定方向に駆動する駆動部と、
前記ステージの前記所定方向の位置を計測する計測部と、
前記計測部により計測された前記ステージの位置と目標位置との偏差を低減するための第1信号と、前記推力に含まれる推力リップルによる前記ステージの前記所定方向の振動を低減するための第2信号とから得られる合成信号を前記駆動部に供給することにより、前記ステージの前記所定方向の位置を制御する制御部と、
を含み、
前記制御部は、
振幅及び位相の少なくとも1つが互いに異なる複数の任意信号を設定する設定工程と、
前記複数の任意信号のうちの1つを用い、時刻に対する前記ステージの目標位置を示す目標位置プロファイルに従って前記駆動部に前記ステージを駆動させたときに前記計測部によって計測される前記ステージの位置を、前記複数の任意信号の各々について、共通の目標位置プロファイルを用いて取得する取得工程と、
前記取得工程で前記複数の任意信号の各々について取得された前記ステージの位置に基づいて、前記推力リップルによる前記ステージの振動の振幅が許容範囲に収まるように前記第2信号を決定する決定工程と、
を行うことにより前記第2信号を生成することを特徴とするステージ装置。 - 前記取得工程で取得される前記ステージの位置は、前記ステージが前記所定方向に等速で移動している期間における前記ステージの位置プロファイルを含み、
前記制御部は、当該期間の前記位置プロファイルを用いて前記第2信号を決定する、ことを特徴とする請求項1に記載のステージ装置。 - 前記取得工程で取得される前記ステージの位置は、前記ステージが前記所定方向に等速で移動し且つ前記振動が一定になっている期間における前記ステージの位置プロファイルを含み、
前記制御部は、当該期間の前記位置プロファイルを用いて前記第2信号を決定する、ことを特徴とする請求項1に記載のステージ装置。 - 前記制御部は、
前記取得工程で前記複数の任意信号の各々について取得された前記ステージの位置に基づいて、前記第2信号を入力とし前記ステージの位置を出力とする関数を決定し、
前記関数を用いて求められる前記ステージの振動の振幅が許容範囲に収まるように前記第2信号を決定する、ことを特徴とする請求項1乃至3のうちいずれか1項に記載のステージ装置。 - 前記制御部は、前記関数を用いて求められる前記ステージの振動の振幅が前記関数を用いずに前記ステージを駆動する場合に比べて小さくなるように前記第2信号を決定する、ことを特徴とする請求項4に記載のステージ装置。
- 前記制御部は、前記推力リップルによる前記ステージの振動の振幅が許容範囲に収まるように前記第2信号の振幅および位相を求めることにより前記第2信号を決定する、ことを特徴とする請求項1乃至5のうちいずれか1項に記載のステージ装置。
- 前記複数の任意信号の各々は、正弦波信号であることを特徴とする請求項1乃至6のうちいずれか1項に記載のステージ装置。
- 前記制御部は、前記設定工程において、前記複数の任意信号の各々を前記第2信号の代わりに用いて前記ステージを駆動させたときの前記ステージの振動が、前記推力リップルによる前記ステージの振動より大きくなるように、前記複数の任意信号を設定する、ことを特徴とする請求項1乃至7のうちいずれか1項に記載のステージ装置。
- 前記設定工程で設定される任意信号の数は、前記第2信号において決定すべきパラメータの数より多い、ことを特徴とする請求項1乃至8のいずれか1項に記載のステージ装置。
- 基板上にパターンを形成するリソグラフィ装置であって、
前記基板を移動させるための請求項1乃至9のうちいずれか1項に記載のステージ装置を含む、ことを特徴とするリソグラフィ装置。 - 前記制御部は、複数の基板の各々にパターンを形成する複数の処理の間において前記ステージを移動させるときに前記取得工程を行う、ことを特徴とする請求項10に記載のリソグラフィ装置。
- 請求項10又は11に記載のリソグラフィ装置を用いて基板にパターンを形成する工程と、
前記工程でパターンを形成された前記基板を加工する工程と、を含み、
前記加工した基板を用いて物品を製造することを特徴とする物品の製造方法。 - 移動可能なステージと、前記ステージの所定方向の位置を計測する計測部と、前記ステージに推力を与えることにより前記ステージを前記所定方向に駆動する駆動部とを含み、前記計測部により計測された前記ステージの位置と目標位置との偏差を低減するための第1信号と、前記推力に含まれる推力リップルによる前記ステージの前記所定方向の振動を低減するための第2信号とから得られる合成信号を前記駆動部に供給することにより、前記ステージの前記所定方向の位置を制御するステージ装置において、前記第2信号を決定する決定方法であって、
振幅及び位相の少なくとも1つが互いに異なる複数の任意信号を設定する設定工程と、
前記複数の任意信号のうちの1つを用い、時刻に対する前記ステージの目標位置を示す目標位置プロファイルに従って前記駆動部に前記ステージを駆動させたときに前記計測部によって計測される前記ステージの位置を、前記複数の任意信号の各々について、共通の目標位置プロファイルを用いて取得する取得工程と、
前記取得工程で前記複数の任意信号の各々について取得された前記ステージの位置に基づいて、前記推力リップルによる前記ステージの振動の振幅が許容範囲に収まるように前記第2信号を決定する決定工程と、
を含むことを特徴とする決定方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014124684A JP6438219B2 (ja) | 2014-06-17 | 2014-06-17 | ステージ装置、リソグラフィ装置、物品の製造方法、および決定方法 |
| KR1020150083121A KR101862053B1 (ko) | 2014-06-17 | 2015-06-12 | 스테이지 장치, 리소그래피 장치, 물품의 제조방법, 및 결정방법 |
| US14/740,705 US9720334B2 (en) | 2014-06-17 | 2015-06-16 | Stage apparatus, lithography apparatus, method of manufacturing an article, and determination method |
| CN201510336733.7A CN105319863B (zh) | 2014-06-17 | 2015-06-17 | 台架装置、光刻装置、物品的制造方法和确定方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014124684A JP6438219B2 (ja) | 2014-06-17 | 2014-06-17 | ステージ装置、リソグラフィ装置、物品の製造方法、および決定方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016004440A JP2016004440A (ja) | 2016-01-12 |
| JP2016004440A5 JP2016004440A5 (ja) | 2017-07-06 |
| JP6438219B2 true JP6438219B2 (ja) | 2018-12-12 |
Family
ID=54836067
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014124684A Active JP6438219B2 (ja) | 2014-06-17 | 2014-06-17 | ステージ装置、リソグラフィ装置、物品の製造方法、および決定方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9720334B2 (ja) |
| JP (1) | JP6438219B2 (ja) |
| KR (1) | KR101862053B1 (ja) |
| CN (1) | CN105319863B (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021064308A (ja) * | 2019-10-17 | 2021-04-22 | 株式会社Subaru | 最適制御システム |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06202736A (ja) * | 1992-12-28 | 1994-07-22 | Yaskawa Electric Corp | トルクリップル補償機能付制御装置 |
| DE69412719T2 (de) * | 1993-06-24 | 1999-02-18 | Canon Kk | Steuerung für einen mehrphasigen Motor |
| JPH07299778A (ja) * | 1994-05-10 | 1995-11-14 | Daikin Ind Ltd | ロボット制御装置 |
| JP2001075611A (ja) * | 1999-09-02 | 2001-03-23 | Kawasaki Steel Corp | セットアップモデルの自動構築方法及び装置 |
| JP2001175332A (ja) | 1999-12-22 | 2001-06-29 | Nikon Corp | ステージの駆動方法、ステージ装置及び露光装置 |
| JP2001297960A (ja) * | 2000-04-11 | 2001-10-26 | Nikon Corp | ステージ装置および露光装置 |
| JP2002198285A (ja) * | 2000-12-25 | 2002-07-12 | Nikon Corp | ステージ装置およびその制振方法並びに露光装置 |
| JP2003088159A (ja) | 2001-09-05 | 2003-03-20 | Yaskawa Electric Corp | トルクリップル補正方法および装置 |
| JP4473088B2 (ja) * | 2004-10-07 | 2010-06-02 | オークマ株式会社 | リニアモータ |
| JP2006211873A (ja) * | 2005-01-31 | 2006-08-10 | Canon Inc | 移動体制御装置及び移動体制御方法 |
| JP4678204B2 (ja) | 2005-02-18 | 2011-04-27 | 横河電機株式会社 | Xyステージ |
| CN1658075A (zh) | 2005-03-25 | 2005-08-24 | 上海微电子装备有限公司 | 一种曝光装置 |
| JP2007142093A (ja) * | 2005-11-17 | 2007-06-07 | Hitachi High-Technologies Corp | ステージ装置、電子線照射装置及び露光装置 |
| JP5007924B2 (ja) * | 2006-09-25 | 2012-08-22 | 株式会社安川電機 | 電動機制御装置とその振動抑制方法 |
| TW200915019A (en) | 2007-09-07 | 2009-04-01 | Nat University Corp Yokohama Nat University | Drive control method, drive control apparatus, stage control method, stage control apparatus, exposure method, exposure apparatus and measuring apparatus |
| JP5034917B2 (ja) | 2007-12-10 | 2012-09-26 | 株式会社ニコン | ステージ装置、露光装置、およびステージ装置の制御方法 |
| JP2010207038A (ja) * | 2009-03-05 | 2010-09-16 | Yokogawa Electric Corp | 推力リップル解析方法及び補正方法 |
| JP5540667B2 (ja) * | 2009-11-26 | 2014-07-02 | シンフォニアテクノロジー株式会社 | 制振装置及びこれを備えた車両 |
| US8488106B2 (en) * | 2009-12-28 | 2013-07-16 | Nikon Corporation | Movable body drive method, movable body apparatus, exposure method, exposure apparatus, and device manufacturing method |
| KR20110108756A (ko) | 2010-03-29 | 2011-10-06 | 윤경원 | 다모드 시스템에서 잔류진동 제거 방법 |
| JP6066592B2 (ja) | 2012-06-12 | 2017-01-25 | キヤノン株式会社 | 露光装置及びデバイス製造方法 |
| US9331624B2 (en) * | 2013-02-25 | 2016-05-03 | National Taiwan University | Thrust ripple mapping system in a precision stage and method thereof |
-
2014
- 2014-06-17 JP JP2014124684A patent/JP6438219B2/ja active Active
-
2015
- 2015-06-12 KR KR1020150083121A patent/KR101862053B1/ko active IP Right Grant
- 2015-06-16 US US14/740,705 patent/US9720334B2/en active Active
- 2015-06-17 CN CN201510336733.7A patent/CN105319863B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| KR101862053B1 (ko) | 2018-05-29 |
| CN105319863A (zh) | 2016-02-10 |
| KR20150144705A (ko) | 2015-12-28 |
| US9720334B2 (en) | 2017-08-01 |
| US20150362846A1 (en) | 2015-12-17 |
| JP2016004440A (ja) | 2016-01-12 |
| CN105319863B (zh) | 2018-05-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5235707B2 (ja) | 制御装置 | |
| JP2005183966A (ja) | リソグラフィ装置およびデバイス製造方法 | |
| JP2017051089A (ja) | 駆動装置、位置決め装置、リソグラフィー装置、および、物品製造方法 | |
| JP4729065B2 (ja) | 座標変換を伴う駆動システムを有するリソグラフィ装置および方法 | |
| JP6438219B2 (ja) | ステージ装置、リソグラフィ装置、物品の製造方法、および決定方法 | |
| US20240004314A1 (en) | Positioning apparatus, lithography apparatus and article manufacturing method | |
| JP7005344B2 (ja) | 制御方法、制御装置、リソグラフィ装置、および物品の製造方法 | |
| JP6333081B2 (ja) | 振動制御装置、リソグラフィ装置、および物品の製造方法 | |
| KR102622405B1 (ko) | 리소그래피 프로세스의 서브-필드 제어 및 연관된 장치 | |
| JP5943557B2 (ja) | 位置決め装置、露光装置およびデバイス製造方法 | |
| JP7389597B2 (ja) | ステージ装置、リソグラフィ装置、および物品製造方法 | |
| TWI739319B (zh) | 檢測裝置及微影裝置 | |
| US9762167B2 (en) | Computer-readable storage medium, generating method, generating apparatus, driving apparatus, processing apparatus, lithography apparatus, and method of manufacturing article | |
| JP2016099736A (ja) | ステージ装置、リソグラフィ装置、物品の製造方法、および制御方法 | |
| EP4116772A1 (en) | Electromagnetic motor system, postion control system, stage apparatus, lithographic apparatus, method of determining a motor-dependent commutation model for an electromagnetic motor | |
| JP2022172907A (ja) | ステージ装置、リソグラフィ装置、および物品の製造方法 | |
| JP2022059871A (ja) | フィードバック制御装置、リソグラフィ装置、測定装置、加工装置、平坦化装置、物品の製造方法、コンピュータプログラム、およびフィードバック制御方法 | |
| CN115685692A (zh) | 控制设备、光刻装置和物品制造方法 | |
| KR20230068293A (ko) | 정보처리장치, 리소그래피 장치, 정보처리방법, 물품의 제조 방법, 및 기억 매체 | |
| TW202217467A (zh) | 使用人工神經網路之運動控制 | |
| JP2023157729A (ja) | 管理装置、処理システム、管理方法、および物品製造方法 | |
| JP2006287106A (ja) | ステージ位置補正方法及び装置 | |
| JP2005327195A (ja) | Xyステージ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170522 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170522 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180308 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180316 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180510 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180702 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180828 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181019 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181116 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6438219 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |