JP6409351B2 - 物理量センサ - Google Patents
物理量センサ Download PDFInfo
- Publication number
- JP6409351B2 JP6409351B2 JP2014121690A JP2014121690A JP6409351B2 JP 6409351 B2 JP6409351 B2 JP 6409351B2 JP 2014121690 A JP2014121690 A JP 2014121690A JP 2014121690 A JP2014121690 A JP 2014121690A JP 6409351 B2 JP6409351 B2 JP 6409351B2
- Authority
- JP
- Japan
- Prior art keywords
- sensor
- angular velocity
- acceleration
- velocity sensor
- detection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5607—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using vibrating tuning forks
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5607—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using vibrating tuning forks
- G01C19/5614—Signal processing
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5607—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using vibrating tuning forks
- G01C19/5628—Manufacturing; Trimming; Mounting; Housings
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C25/00—Manufacturing, calibrating, cleaning, or repairing instruments or devices referred to in the other groups of this subclass
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P15/125—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values by capacitive pick-up
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P21/00—Testing or calibrating of apparatus or devices covered by the preceding groups
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P2015/0805—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration
- G01P2015/0808—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining in-plane movement of the mass, i.e. movement of the mass in the plane of the substrate
- G01P2015/0811—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining in-plane movement of the mass, i.e. movement of the mass in the plane of the substrate for one single degree of freedom of movement of the mass
- G01P2015/0814—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining in-plane movement of the mass, i.e. movement of the mass in the plane of the substrate for one single degree of freedom of movement of the mass for translational movement of the mass, e.g. shuttle type
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/01—Means for bonding being attached to, or being formed on, the surface to be connected, e.g. chip-to-package, die-attach, "first-level" interconnects; Manufacturing methods related thereto
- H01L2224/26—Layer connectors, e.g. plate connectors, solder or adhesive layers; Manufacturing methods related thereto
- H01L2224/31—Structure, shape, material or disposition of the layer connectors after the connecting process
- H01L2224/32—Structure, shape, material or disposition of the layer connectors after the connecting process of an individual layer connector
- H01L2224/321—Disposition
- H01L2224/32135—Disposition the layer connector connecting between different semiconductor or solid-state bodies, i.e. chip-to-chip
- H01L2224/32145—Disposition the layer connector connecting between different semiconductor or solid-state bodies, i.e. chip-to-chip the bodies being stacked
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/01—Means for bonding being attached to, or being formed on, the surface to be connected, e.g. chip-to-package, die-attach, "first-level" interconnects; Manufacturing methods related thereto
- H01L2224/42—Wire connectors; Manufacturing methods related thereto
- H01L2224/47—Structure, shape, material or disposition of the wire connectors after the connecting process
- H01L2224/48—Structure, shape, material or disposition of the wire connectors after the connecting process of an individual wire connector
- H01L2224/4805—Shape
- H01L2224/4809—Loop shape
- H01L2224/48091—Arched
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/01—Means for bonding being attached to, or being formed on, the surface to be connected, e.g. chip-to-package, die-attach, "first-level" interconnects; Manufacturing methods related thereto
- H01L2224/42—Wire connectors; Manufacturing methods related thereto
- H01L2224/47—Structure, shape, material or disposition of the wire connectors after the connecting process
- H01L2224/48—Structure, shape, material or disposition of the wire connectors after the connecting process of an individual wire connector
- H01L2224/481—Disposition
- H01L2224/48135—Connecting between different semiconductor or solid-state bodies, i.e. chip-to-chip
- H01L2224/48145—Connecting between different semiconductor or solid-state bodies, i.e. chip-to-chip the bodies being stacked
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/73—Means for bonding being of different types provided for in two or more of groups H01L2224/10, H01L2224/18, H01L2224/26, H01L2224/34, H01L2224/42, H01L2224/50, H01L2224/63, H01L2224/71
- H01L2224/732—Location after the connecting process
- H01L2224/73251—Location after the connecting process on different surfaces
- H01L2224/73265—Layer and wire connectors
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2924/00—Indexing scheme for arrangements or methods for connecting or disconnecting semiconductor or solid-state bodies as covered by H01L24/00
- H01L2924/15—Details of package parts other than the semiconductor or other solid state devices to be connected
- H01L2924/161—Cap
- H01L2924/1615—Shape
- H01L2924/16195—Flat cap [not enclosing an internal cavity]
Description
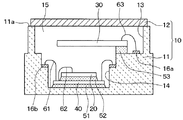
本発明の第1実施形態について図面を参照しつつ説明する。図1に示されるように、物理量センサは、ケース10を備えており、当該ケース10は収容部11と蓋部12とを有する構成とされている。
本発明は上記した実施形態に限定されるものではなく、特許請求の範囲に記載した範囲内において適宜変更が可能である。
15 収容空間
20 加速度センサ
30 角速度センサ
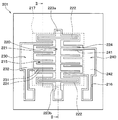
201 センサ部
202 キャップ部
215 センシング部
255 気密室
322 センシング部
415 検出手段
425 自己診断手段
Claims (4)
- 加速度に応じたセンサ信号を出力するセンシング部(215)が形成された加速度センサ(20)と、
所定方向に振動する振動体(312)を有するセンシング部(322)が形成され、前記センシング部から角速度に応じたセンサ信号が出力される角速度センサ(30)と、
所定圧力とされた収容空間(15)を有し、前記収容空間に前記加速度センサおよび前記角速度センサを収容するケース(10)と、を備え、
前記加速度センサおよび前記角速度センサの少なくともいずれか一方は、前記センシング部が形成されたセンサ部(201)にキャップ部(202)が配置され、前記センシング部が前記センサ部と前記キャップ部との間に構成される気密室(255)に気密封止されたパッケージ構造である物理量センサにおいて、
前記角速度センサにおける振動体の振動に応じた検出信号を出力する検出手段(415)と、
前記検出手段から出力された検出信号に基づき、前記角速度センサの検出環境を自己診断する自己診断手段(425)と、を有し、
前記加速度センサは、前記パッケージ構造とされ、前記気密室が大気圧とされており、
前記収容空間は、真空圧とされ、
前記検出手段および前記自己診断手段は、回路基板に備えられ、前記ケースの収容空間に配置されていることを特徴とする物理量センサ。 - 加速度に応じたセンサ信号を出力するセンシング部(215)が形成された加速度センサ(20)と、
所定方向に振動する振動体(312)を有するセンシング部(322)が形成され、前記センシング部から角速度に応じたセンサ信号が出力される角速度センサ(30)と、
所定圧力とされた収容空間(15)を有し、前記収容空間に前記加速度センサおよび前記角速度センサを収容するケース(10)と、を備え、
前記加速度センサおよび前記角速度センサの少なくともいずれか一方は、前記センシング部が形成されたセンサ部(201)にキャップ部(202)が配置され、前記センシング部が前記センサ部と前記キャップ部との間に構成される気密室(255)に気密封止されたパッケージ構造である物理量センサにおいて、
前記角速度センサにおける振動体の振動に応じた検出信号を出力する検出手段(415)と、
前記検出手段から出力された検出信号に基づき、前記角速度センサの検出環境を自己診断する自己診断手段(425)と、を有し、
前記角速度センサは、前記パッケージ構造とされ、前記気密室が真空圧とされており、
前記収容空間は、大気圧とされ、
前記検出手段および前記自己診断手段は、回路基板に備えられ、前記ケースの収容空間に配置されていることを特徴とする物理量センサ。 - 加速度に応じたセンサ信号を出力するセンシング部(215)が形成された加速度センサ(20)と、
所定方向に振動する振動体(312)を有するセンシング部(322)が形成され、前記センシング部から角速度に応じたセンサ信号が出力される角速度センサ(30)と、
所定圧力とされた収容空間(15)を有し、前記収容空間に前記加速度センサおよび前記角速度センサを収容するケース(10)と、を備え、
前記加速度センサおよび前記角速度センサの少なくともいずれか一方は、前記センシング部が形成されたセンサ部(201)にキャップ部(202)が配置され、前記センシング部が前記センサ部と前記キャップ部との間に構成される気密室(255)に気密封止されたパッケージ構造である物理量センサにおいて、
前記角速度センサにおける振動体の振動に応じた検出信号を出力する検出手段(415)と、
前記検出手段から出力された検出信号に基づき、前記角速度センサの検出環境を自己診断する自己診断手段(425)と、を有し、
前記角速度センサは、前記パッケージ構造とされ、前記気密室が真空圧とされており、
前記加速度センサは、前記パッケージ構造とされ、前記気密室が大気圧とされ、
前記検出手段および前記自己診断手段は、回路基板に備えられ、前記ケースの収容空間に配置されていることを特徴とする物理量センサ。 - 前記収容空間の体積に対する前記気密室の体積の比は、1.0×10−7以上とされていることを特徴とする請求項1に記載の物理量センサ。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014121690A JP6409351B2 (ja) | 2014-06-12 | 2014-06-12 | 物理量センサ |
| PCT/JP2015/002919 WO2015190104A1 (ja) | 2014-06-12 | 2015-06-11 | 物理量センサ |
| US15/307,859 US10393523B2 (en) | 2014-06-12 | 2015-06-11 | Physical quantity sensor |
| DE112015002785.8T DE112015002785T5 (de) | 2014-06-12 | 2015-06-11 | Sensor für eine physikalische Grösse |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014121690A JP6409351B2 (ja) | 2014-06-12 | 2014-06-12 | 物理量センサ |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016001158A JP2016001158A (ja) | 2016-01-07 |
| JP2016001158A5 JP2016001158A5 (ja) | 2016-06-16 |
| JP6409351B2 true JP6409351B2 (ja) | 2018-10-24 |
Family
ID=54833215
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014121690A Active JP6409351B2 (ja) | 2014-06-12 | 2014-06-12 | 物理量センサ |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10393523B2 (ja) |
| JP (1) | JP6409351B2 (ja) |
| DE (1) | DE112015002785T5 (ja) |
| WO (1) | WO2015190104A1 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6492739B2 (ja) | 2015-02-20 | 2019-04-03 | セイコーエプソン株式会社 | 回路装置、物理量検出装置、電子機器及び移動体 |
| JP6586735B2 (ja) * | 2015-02-20 | 2019-10-09 | セイコーエプソン株式会社 | 回路装置、物理量検出装置、電子機器及び移動体 |
| KR102437764B1 (ko) | 2017-12-20 | 2022-08-30 | 삼성전자주식회사 | 센서 패키지, 센서 패키지의 제조 방법, 및 리드 구조체의 제조 방법 |
| JP6996344B2 (ja) * | 2018-02-28 | 2022-01-17 | セイコーエプソン株式会社 | センサーデバイス、力検出装置およびロボット |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3123352B2 (ja) | 1994-06-29 | 2001-01-09 | 株式会社デンソー | 漏れ測定方法及びその装置 |
| JPH10206273A (ja) * | 1997-01-21 | 1998-08-07 | Toyota Motor Corp | 角速度センサの気密性確認方法及び装置 |
| JPH1151802A (ja) * | 1997-07-31 | 1999-02-26 | River Eletec Kk | 圧電素子用パッケージの気密検査方法 |
| JP3435665B2 (ja) | 2000-06-23 | 2003-08-11 | 株式会社村田製作所 | 複合センサ素子およびその製造方法 |
| JP3512004B2 (ja) | 2000-12-20 | 2004-03-29 | トヨタ自動車株式会社 | 力学量検出装置 |
| DE102004027501A1 (de) | 2004-06-04 | 2005-12-22 | Robert Bosch Gmbh | Mikromechanisches Bauelement mit mehreren Kavernen und Herstellungsverfahren |
| JP2006010659A (ja) | 2004-06-21 | 2006-01-12 | Microstone Corp | 振動ジャイロスコープ |
| JP4543869B2 (ja) | 2004-10-15 | 2010-09-15 | 株式会社デンソー | 振動型角速度センサにおけるセンサ回路 |
| JP5222457B2 (ja) * | 2005-09-26 | 2013-06-26 | 株式会社日立製作所 | センサおよびセンサモジュール |
| DE102006016260A1 (de) | 2006-04-06 | 2007-10-18 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Mikromechanische Gehäusung mit mindestens zwei Kavitäten mit unterschiedlichem Innendruck und/oder unterschiedlicher Gaszusammensetzung sowie Verfahren zu deren Herstellung |
| WO2009031285A1 (ja) | 2007-09-03 | 2009-03-12 | Panasonic Corporation | 慣性力センサ |
| JP5319122B2 (ja) | 2008-01-21 | 2013-10-16 | 日立オートモティブシステムズ株式会社 | 慣性センサ |
| US7800190B2 (en) * | 2008-06-16 | 2010-09-21 | Honeywell International Inc. | Getter on die in an upper sense plate designed system |
| JP5321150B2 (ja) | 2009-03-05 | 2013-10-23 | セイコーエプソン株式会社 | 複合センサー |
| JP2010204061A (ja) * | 2009-03-06 | 2010-09-16 | Panasonic Corp | 電子部品及びその製造方法 |
| JP5316479B2 (ja) * | 2009-06-09 | 2013-10-16 | 株式会社デンソー | 半導体力学量センサの製造方法及び半導体力学量センサ |
| JP5298047B2 (ja) * | 2010-02-26 | 2013-09-25 | 日立オートモティブシステムズ株式会社 | 複合センサの製造方法 |
| US20120142136A1 (en) | 2010-12-01 | 2012-06-07 | Honeywell International Inc. | Wafer level packaging process for mems devices |
| US20140260612A1 (en) * | 2011-11-28 | 2014-09-18 | Hitachi Automotive Systems, Ltd. | Composite Sensor and Method for Manufacturing The Same |
| JP2013120179A (ja) * | 2011-12-09 | 2013-06-17 | Panasonic Corp | 角速度センサ |
| JP6435631B2 (ja) | 2014-04-23 | 2018-12-12 | 株式会社デンソー | 角速度センサ |
-
2014
- 2014-06-12 JP JP2014121690A patent/JP6409351B2/ja active Active
-
2015
- 2015-06-11 DE DE112015002785.8T patent/DE112015002785T5/de active Pending
- 2015-06-11 WO PCT/JP2015/002919 patent/WO2015190104A1/ja active Application Filing
- 2015-06-11 US US15/307,859 patent/US10393523B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| DE112015002785T5 (de) | 2017-03-02 |
| JP2016001158A (ja) | 2016-01-07 |
| US10393523B2 (en) | 2019-08-27 |
| US20170059320A1 (en) | 2017-03-02 |
| WO2015190104A1 (ja) | 2015-12-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9835641B2 (en) | Angular velocity detection device and angular velocity sensor including the same | |
| JP6897187B2 (ja) | 物理量検出器、物理量検出デバイス、電子機器および移動体 | |
| JP6311469B2 (ja) | 物理量センサ | |
| JP6409351B2 (ja) | 物理量センサ | |
| JP2002005950A (ja) | 複合センサ素子およびその製造方法 | |
| JP6372361B2 (ja) | 複合センサ | |
| JP6512006B2 (ja) | センサ装置 | |
| JP6435631B2 (ja) | 角速度センサ | |
| JP4974359B2 (ja) | 力学量センサ | |
| JP2008275325A (ja) | センサ装置 | |
| JP6372450B2 (ja) | 複合センサ | |
| WO2011074099A1 (ja) | 角速度検出装置 | |
| CN105388323B (zh) | 振动式传感器装置 | |
| JP2010190705A (ja) | 3軸検出角速度センサ | |
| WO2014030492A1 (ja) | 慣性力センサ | |
| JP2006226799A (ja) | 力学量センサ | |
| CN111239439B (zh) | 振动式传感器装置 | |
| JP4333474B2 (ja) | 圧電振動子 | |
| JP2014119369A (ja) | 物理量検出センサー、物理量検出装置、電子機器および移動体 | |
| JP5776184B2 (ja) | センサ装置 | |
| JP2015001493A (ja) | 物理量センサ | |
| JP2012194032A (ja) | センサ装置 | |
| JP2017122678A (ja) | 物理量センサ | |
| JP2017022461A (ja) | 発振装置および力学量センサ | |
| JP2011141210A (ja) | 角速度検出装置の調整方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160420 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170217 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171212 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180207 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180710 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180810 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180828 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180910 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6409351 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |