JP6358409B2 - 車両の運転支援制御方法及び制御装置 - Google Patents
車両の運転支援制御方法及び制御装置 Download PDFInfo
- Publication number
- JP6358409B2 JP6358409B2 JP2017562459A JP2017562459A JP6358409B2 JP 6358409 B2 JP6358409 B2 JP 6358409B2 JP 2017562459 A JP2017562459 A JP 2017562459A JP 2017562459 A JP2017562459 A JP 2017562459A JP 6358409 B2 JP6358409 B2 JP 6358409B2
- Authority
- JP
- Japan
- Prior art keywords
- pedestrian
- driving support
- vehicle
- detected
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/12—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger
- B60T7/22—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger initiated by contact of vehicle, e.g. bumper, with an external object, e.g. another vehicle, or by means of contactless obstacle detectors mounted on the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/66—Radar-tracking systems; Analogous systems
- G01S13/72—Radar-tracking systems; Analogous systems for two-dimensional [2D] tracking, e.g. combination of angle and range tracking, track-while-scan radar
- G01S13/723—Radar-tracking systems; Analogous systems for two-dimensional [2D] tracking, e.g. combination of angle and range tracking, track-while-scan radar by using numerical data
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/86—Combinations of radar systems with non-radar systems, e.g. sonar, direction finder
- G01S13/867—Combination of radar systems with cameras
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/41—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00 using analysis of echo signal for target characterisation; Target signature; Target cross-section
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0246—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0257—Control of position or course in two dimensions specially adapted to land vehicles using a radar
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/103—Static body considered as a whole, e.g. static pedestrian or occupant recognition
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/143—Alarm means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/403—Image sensing, e.g. optical camera
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/408—Radar; Laser, e.g. lidar
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/402—Type
- B60W2554/4029—Pedestrians
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9327—Sensor installation details
- G01S2013/93271—Sensor installation details in the front of the vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Computer Networks & Wireless Communication (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Multimedia (AREA)
- Electromagnetism (AREA)
- Human Computer Interaction (AREA)
- Theoretical Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Regulating Braking Force (AREA)
Description
カメラからの画像信号に基づいて自車両の前方に存在する対象物が歩行者候補であると検出されると、検出された歩行者候補を制御対象として運転支援制御を開始する。
その後、カメラにより検出された歩行者候補が、レーダーからの反射波により検出された対象物とマッチングするかどうかを比較判定し、マッチングが成立すると運転支援制御を継続し、マッチングが成立しないと運転支援制御を解除する。
そして、自車両の前方に歩行者が存在するときに対象物認識性がカメラより高いレーダーにより検出される対象物を比較判定に用い、運転支援制御が開始された後、カメラにより検出された歩行者候補と対象物がマッチングするかどうかが比較判定される。そして、マッチングが成立すると運転支援制御が継続され、マッチングが成立しないと運転支援制御が解除される。
この結果、走行中、歩行者の誤判定防止機能を確保しつつ、運転支援制御を開始する開始タイミングの早期化を達成することができる。
実施例1における運転支援制御方法及び制御装置は、エマージェンシーブレーキ制御システムと呼ばれる自動ブレーキ制御を実施するシステムが搭載された電動車両(ハイブリッド車、電気自動車、燃料電池車、等)に適用したものである。以下、実施例1の運転支援制御装置の構成を、「運転支援システムの全体構成」、「自動ブレーキ制御処理構成」に分けて説明する。
図1は、実施例1の運転支援制御方法及び制御装置が適用された運転支援システムの全体構成を示す。以下、図1に基づき、運転支援システムの全体構成を説明する。
なお、「CAN」とは、「Controller Area Network」の略称である。
なお、「ADAS」は、「Advanced Driver Assistance System」の略称である。
図2は、実施例1の運転支援コントローラ3にて実行される制御対象が歩行者であるときの自動ブレーキ制御処理の流れを示す。以下、自動ブレーキ制御処理構成をあらわす図2の各ステップについて説明する。
ここで、「自車両情報」とは、車載された各コントローラからのCAN通信信号により受信される、車輪速、アクセル開度、ブレーキスイッチ、ブレーキ液圧、シフトポジション、ステアリング角、ステアリング角速度、加速度、ヨーレート、システムON/OFF状態、等のことをいう。
ここで、「カメラ情報」とは、フロントカメラユニット1から取得される車両前方の画像情報のことをいう。
ここで、「歩行者候補の検出」は、フロントカメラユニット1からの画像情報に基いて車両前方に存在する様々な対象物を検出し、さらに、先行車を含む複数の対象物の中から歩行者候補を検出するという、周知の歩行者候補検出手法を用いて行う。
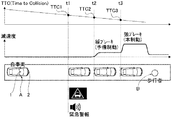
ここで、「自動ブレーキ制御の実施許可」とは、例えば、歩行者候補が検出されたときの接触予測時間TTCが警報閾値TTC1を超えている値から徐々に低下するとき、警報モード→予備制動モード→本制動モードへと遷移する自動ブレーキ制御を許可することをいう。
ここで、「警報閾値TTC1」と「予備制動閾値TTC2」と「本制動閾値TTC3」とは、図3のTTC閾値マップに示すように、警報閾値TTC1>予備制動閾値TTC2>本制動閾値TTC3の関係にて設定される。
なお、自動ブレーキ制御での制御対象が先行車の場合には、TTC閾値マップの横軸を自車両と先行車の相対速度として自動ブレーキ制御が実施される。
ここで、歩行者候補の検出により自動ブレーキ制御が許可されたときの接触予測時間TTCが警報閾値TTC1以下であれば、図4に示すように、警報モード→予備制動モード→本制動モードへと遷移する自動ブレーキ制御を開始する。なお、歩行者候補の検出により自動ブレーキ制御が許可されたときの接触予測時間TTCが予備制動閾値TTC2以下であれば、予備制動モード(警報)→本制動モード(警報)へとモード遷移する自動ブレーキ制御を開始する。また、歩行者候補の検出により自動ブレーキ制御が許可されたときの接触予測時間TTCが本制動閾値TTC3以下であれば、本制動モード(警報)を実施する自動ブレーキ制御を開始する。
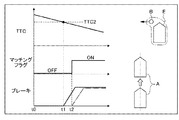
ここで、「マッチング判定」とは、フロントカメラユニット1により検出された歩行者候補の位置情報を中心点として許容誤差領域を設定する。そして、ミリ波レーダー2からの反射波により検出された複数の対象物の方向/距離による位置情報のうち、歩行者候補に対し最も近接する対象物の位置情報を選択する。このミリ波レーダー2からの選択された対象物の位置情報が、許容誤差領域内に存在するかどうか比較判断することをいう。
ここで、ミリ波レーダー2からの選択された対象物D1が許容誤差領域C内に存在する状態であると判断された時間の積算値(カウント時間)が、マッチング判定時間(例えば、200msec)を経過すると「マッチング成立」とする。一方、ミリ波レーダー2からの選択された対象物D1が許容誤差領域C内に存在しない場合、或いは、ミリ波レーダー2からの選択された対象物D1が許容誤差領域C内に一時的に存在しても、積算値がマッチング時間に満たない間は、「マッチング不成立」とする。
ここで、マッチング成立により制御対象の歩行者Bであると判定された場合、マッチング成立前であって、歩行者候補B’が検出されている間の自動ブレーキ制御での許容減速G(例えば、0.6G程度)よりも高い許容減速G(例えば、1.0G程度)とする。なお、自動ブレーキ制御則そのものについては、マッチング成立/不成立にかかわらず同じ制御則とすることで、自動ブレーキ制御を継続することになる。
ここで、「所定時間T」は、フロントカメラユニット1により検出された歩行者候補B’が実際に存在する歩行者である場合、制御対象の歩行者Bであると判定するのに要する時間に、余裕時間を加えた時間に設定する。
即ち、マッチング判定を開始してから所定時間Tが経過してもマッチング不成立であると判断されると、フロントカメラユニット1により検出された歩行者候補B’が制御対象となる歩行者Bではないと判定する。自動ブレーキ制御の解除は、警報モードに入っているときは、警報を停止し、予備制動モードや本制動モードに入っているときは警報を停止すると共に、自動ブレーキ制御により付加されている制動力を解除する制御を行う。制動力解除制御は、急な車両挙動の変動を抑えて制動力を解除する制御であり、例えば、自動ブレーキ解除時の制動力を徐々に低下させる、或いは、自動ブレーキ解除時の制動力を所定時間保った後に徐々に低下させるような制御を行う。
実施例1の電動車両の運転支援制御方法及び制御装置における作用を、「自動ブレーキ制御処理作用」、「自動ブレーキ制御作用」、「自動ブレーキ制御の特徴作用」に分けて説明する。
以下、図2のフローチャートに基づき、自動ブレーキ制御処理作用を説明する。
カメラ情報に基づく歩行者候補B’が検出されないときは、図2のフローチャートにおいて、ステップS1→ステップS2→ステップS3へと進む流れが繰り返される。そして、カメラ情報に基づく歩行者候補B’が検出されると、ステップS3からステップS4へ進み、ステップS4では、自動ブレーキ制御の実施が許可される。
まず、図5に示すように、自車両Aの予想進路上の前方位置を歩行者Bが横切ってきた場合の自動ブレーキ制御作用を、図6に基づいて説明する。なお、図6において、縦距離とは、自車両Aと歩行者候補B’(歩行者B)との図5の縦方向の距離をいい、縦距離=0が縦方向の接触距離になる。横距離とは、自車両Aと歩行者候補B’(歩行者B)との図5の横方向の距離をいい、横距離=0が横方向の接触距離になる。
実施例1では、フロントカメラユニット1からの画像信号に基づいて自車両Aの前方に存在する対象物が歩行者候補B’であると検出されると、検出された歩行者候補B’を制御対象として自動ブレーキ制御の実施を許可する。その後、フロントカメラユニット1により検出された歩行者候補B’が、ミリ波レーダー2からの反射波により検出された対象物とマッチングするかどうかを比較判定する。そして、比較判定結果(マッチング判定結果)に基づき自動ブレーキ制御の実施を継続するか否かを決定する。
即ち、歩行者判定の信頼度は、フロントカメラユニット1による歩行者候補B’を検出しているだけのときよりも、比較判定による歩行者Bを判定しているときの方が高い。そして、歩行者候補B’を検出しているとき、その後、比較判定により歩行者候補B’が歩行者でないと判定されると、自動ブレーキ制御を途中で解除することになる。
従って、フロントカメラユニット1による歩行者候補B’を検出している間は、自動ブレーキ制御で許可される減速Gを抑えておくことで、自車両Aを減速させつつも自動ブレーキ制御の解除に備えておくことができる。そして、比較判定による歩行者Bが判定されると、自動ブレーキ制御で許可される減速Gを高くすることで、自車両が停止するまでの必要距離が短縮され、例えば、歩行者の飛び出し等の緊急時に高速域まで拡大した自動ブレーキ制御の作動が確保される。
実施例1における電動車両の運転支援制御方法及び制御装置にあっては、下記に列挙する効果が得られる。
この車両の運転支援制御方法において、外界認識センサとして、カメラ(フロントカメラユニット1)とレーダー(ミリ波レーダー2)を備える。
カメラ(フロントカメラユニット1)からの画像信号に基づいて自車両Aの前方に存在する対象物が歩行者候補B’であると検出されると、検出された歩行者候補B’を制御対象として運転支援制御(自動ブレーキ制御)の実施を許可する。
その後、カメラ(フロントカメラユニット1)により検出された歩行者候補B’が、レーダー(ミリ波レーダー2)からの反射波により検出された対象物D1とマッチングするかどうかを比較判定し、比較判定結果に基づき運転支援制御(自動ブレーキ制御)の実施を継続するか否かを決定する(図2)。
このため、走行中、歩行者Bの誤判定防止機能を確保しつつ、運転支援制御(自動ブレーキ制御)を開始する開始タイミングの早期化を達成する車両の運転支援制御方法を提供することができる。
レーダー(ミリ波レーダー2)からの反射波により検出された複数の対象物のうち歩行者候補B’に最も近い対象物D1の方向/距離による位置情報が、許容誤差領域C内で所定時間だけマッチングすると、カメラ(フロントカメラユニット1)により検出された歩行者候補B’を、制御対象の歩行者Bであると判定する(図5)。
このため、(1)の効果に加え、制御対象の歩行者Bを比較判定するとき、歩行者判定精度の確保と、歩行者判定応答性の向上と、の両立を達成することができる。
このため、(1)又は(2)の効果に加え、警報と自動ブレーキ制御による運転支援制御を実施するとき、運転者に対する段階的な運転支援により、自動ブレーキ制御の作動頻度を低減できると共に、自車両Aと歩行者Bとの接触回避が達成されるシーンを拡大することができる。
このため、(3)の効果に加え、歩行者候補B’が検出されている間は自動ブレーキ制御の解除に備えつつも、歩行者Bが判定されると、高速域まで拡大した自動ブレーキ制御の作動を確保することができる。
この車両の運転支援制御装置において、外界認識センサとして、カメラ(フロントカメラユニット1)とレーダー(ミリ波レーダー2)を備える。
運転支援コントローラ3は、カメラ(フロントカメラユニット1)からの画像信号に基づいて自車両Aの前方に存在する対象物が歩行者候補B’であると判定されると、判定された歩行者候補B’を制御対象として運転支援制御(自動ブレーキ制御)の実施を許可する。
その後、カメラ(フロントカメラユニット1)により判定された歩行者候補B’が、レーダー(ミリ波レーダー2)からの反射波により検出された対象物D1とマッチングするかどうかを比較判定し、比較判定結果に基づき運転支援制御(自動ブレーキ制御)の実施を継続するか否かを決定する制御処理を行う(図2)。
このため、走行中、歩行者Bの誤判定防止機能を確保しつつ、運転支援制御(自動ブレーキ制御)を開始する開始タイミングの早期化を達成する車両の運転支援制御装置を提供することができる。
Claims (5)
- 自車両の前方情報を取得する外界認識センサを備え、前記外界認識センサにより歩行者が検出されると、自車両が歩行者へ接触するのを回避する運転支援制御を実施する車両の運転支援制御方法において、
前記外界認識センサとして、カメラとレーダーを備え、
前記カメラからの画像信号に基づいて自車両の前方に存在する対象物が歩行者候補であると検出されると、検出された歩行者候補を制御対象として前記運転支援制御を開始し、
その後、前記カメラにより検出された歩行者候補が、前記レーダーからの反射波により検出された対象物とマッチングするかどうかを比較判定し、マッチングが成立すると前記運転支援制御を継続し、マッチングが成立しないと前記運転支援制御を解除する
ことを特徴とする車両の運転支援制御方法。 - 請求項1に記載された車両の運転支援制御方法において、
前記比較判定では、前記カメラにより検出された歩行者候補の方向/距離による位置情報を中心点とする許容誤差領域を設定し、
前記レーダーからの反射波により検出された複数の対象物のうち前記歩行者候補に最も近い対象物の方向/距離による位置情報が、前記許容誤差領域内で所定時間だけマッチングすると、前記カメラにより検出された歩行者候補を、制御対象の歩行者であると判定する
ことを特徴とする車両の運転支援制御方法。 - 請求項1又は請求項2に記載された車両の運転支援制御方法において、
前記運転支援制御は、運転支援制御の実施が許可されているとき、警報と自動ブレーキ制御により実施するものであり、
歩行者との接触可能性が第1段階になると前記警報による運転支援を開始し、前記第1段階よりも歩行者との接触可能性が高い第2段階になると前記警報に加えて緩ブレーキによる予備制動を開始し、前記第2段階よりも歩行者との接触可能性が高い第3段階になると前記警報に加えて急ブレーキによる本制動を開始する
ことを特徴とする車両の運転支援制御方法。 - 請求項3に記載された車両の運転支援制御方法において、
前記自動ブレーキ制御は、前記カメラによる歩行者候補の判定から前記レーダーを加えた比較判定による歩行者の判定へ移行すると、前記自動ブレーキ制御での許可減速Gを、前記歩行者候補が検出されている間の許可減速Gよりも高くする
ことを特徴とする車両の運転支援制御方法。 - 自車両の前方情報を取得する外界認識センサと、
前記外界認識センサにより歩行者が判定されると、自車両が歩行者へ接触するのを回避する運転支援制御を実施する運転支援コントローラと、
を有する車両の運転支援制御装置において、
前記外界認識センサとして、カメラとレーダーを備え、
前記運転支援コントローラは、前記カメラからの画像信号に基づいて自車両の前方に存在する対象物が歩行者候補であると判定されると、判定された歩行者候補を制御対象として前記運転支援制御を開始し、
その後、前記カメラにより検出された歩行者候補が、前記レーダーからの反射波により検出された対象物とマッチングするかどうかを比較判定し、マッチングが成立すると前記運転支援制御を継続し、マッチングが成立しないと前記運転支援制御を解除する制御処理を行う
ことを特徴とする車両の運転支援制御装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016011032 | 2016-01-22 | ||
| JP2016011032 | 2016-01-22 | ||
| PCT/JP2016/085130 WO2017126226A1 (ja) | 2016-01-22 | 2016-11-28 | 車両の運転支援制御方法及び制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP6358409B2 true JP6358409B2 (ja) | 2018-07-25 |
| JPWO2017126226A1 JPWO2017126226A1 (ja) | 2018-09-06 |
Family
ID=59362276
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017562459A Active JP6358409B2 (ja) | 2016-01-22 | 2016-11-28 | 車両の運転支援制御方法及び制御装置 |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US10576972B2 (ja) |
| EP (1) | EP3407327B1 (ja) |
| JP (1) | JP6358409B2 (ja) |
| CN (1) | CN108475469B (ja) |
| BR (1) | BR112018014840B1 (ja) |
| MX (1) | MX374457B (ja) |
| MY (1) | MY188558A (ja) |
| RU (1) | RU2687196C1 (ja) |
| WO (1) | WO2017126226A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102243244B1 (ko) * | 2019-08-26 | 2021-04-23 | 엘지전자 주식회사 | 자율주행시스템에서 긴급단계에 따른 제어방법 및 이를 위한 장치 |
Families Citing this family (41)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6569523B2 (ja) * | 2015-12-25 | 2019-09-04 | 株式会社デンソー | 走行支援装置 |
| KR101996420B1 (ko) * | 2016-12-30 | 2019-10-01 | 현대자동차주식회사 | 보행자 충돌 시 충격 완화 장치 및 방법 |
| KR101996418B1 (ko) * | 2016-12-30 | 2019-07-04 | 현대자동차주식회사 | 센서 융합 기반 보행자 탐지 및 보행자 충돌 방지 장치 및 방법 |
| KR101996419B1 (ko) * | 2016-12-30 | 2019-07-04 | 현대자동차주식회사 | 센서 융합 기반 보행자 탐지 및 보행자 충돌 방지 장치 및 방법 |
| JP6859720B2 (ja) * | 2017-01-24 | 2021-04-14 | いすゞ自動車株式会社 | 車両制御装置及び管理システム |
| JP6953922B2 (ja) * | 2017-09-06 | 2021-10-27 | 株式会社デンソー | 車両の運転支援装置および車両の運転支援方法 |
| JP6590300B2 (ja) * | 2017-10-03 | 2019-10-16 | マツダ株式会社 | 運転支援装置 |
| KR102552490B1 (ko) * | 2018-01-03 | 2023-07-06 | 현대자동차주식회사 | 차량용 영상 처리 장치 및 방법 |
| JP2019172032A (ja) * | 2018-03-28 | 2019-10-10 | ダイハツ工業株式会社 | 自動制動装置 |
| CN109435847A (zh) * | 2018-09-14 | 2019-03-08 | 常州智行科技有限公司 | 一种基于摄像头与毫米波雷达的车辆防追尾预警方法 |
| EP3861370A1 (en) * | 2018-10-01 | 2021-08-11 | KPIT Technologies Limited | Perception sensors based fusion system for vehicle control and method thereof |
| WO2020116204A1 (ja) * | 2018-12-07 | 2020-06-11 | ソニーセミコンダクタソリューションズ株式会社 | 情報処理装置、情報処理方法、プログラム、移動体制御装置、及び、移動体 |
| CN109581358B (zh) * | 2018-12-20 | 2021-08-31 | 奇瑞汽车股份有限公司 | 障碍物的识别方法、装置及存储介质 |
| CN109649360B (zh) * | 2019-01-18 | 2024-01-30 | 佛山职业技术学院 | 一种汽车避让行人的方法及系统 |
| DE102019107412B3 (de) * | 2019-03-22 | 2020-07-09 | Zf Active Safety Gmbh | Steuerungssystem und Steuerungsverfahren zum Führen eines Kraftfahrzeugs |
| CN111698459B (zh) * | 2019-04-26 | 2021-07-27 | 广东邦盛北斗科技股份公司 | 对象参数实时解析方法 |
| CN110068818A (zh) * | 2019-05-05 | 2019-07-30 | 中国汽车工程研究院股份有限公司 | 通过雷达和图像采集设备进行交通路口车辆及行人检测的工作方法 |
| DE102019209292A1 (de) * | 2019-06-26 | 2020-12-31 | Robert Bosch Gmbh | Verfahren zum Betreiben einer Umfeldsensorik eines Fahrzeugs und Umfeldsensorik |
| CN110333725B (zh) * | 2019-07-26 | 2022-05-20 | 爱驰汽车有限公司 | 自动驾驶避让行人的方法、系统、设备及存储介质 |
| JP2021024539A (ja) * | 2019-08-09 | 2021-02-22 | トヨタ自動車株式会社 | 運転支援装置 |
| US11375179B1 (en) * | 2019-11-08 | 2022-06-28 | Tanzle, Inc. | Integrated display rendering |
| CN110969855A (zh) * | 2019-12-13 | 2020-04-07 | 长沙莫之比智能科技有限公司 | 一种基于毫米波雷达的交通流量监测系统 |
| JP7290104B2 (ja) * | 2019-12-23 | 2023-06-13 | 株式会社デンソー | 自己位置推定装置、方法及びプログラム |
| US11590891B2 (en) | 2020-01-16 | 2023-02-28 | Caterpillar Paving Products Inc. | Control system for a machine |
| JP7259778B2 (ja) * | 2020-01-31 | 2023-04-18 | トヨタ自動車株式会社 | 車両、及び自動運転システム |
| CN111739338A (zh) * | 2020-05-07 | 2020-10-02 | 智慧互通科技有限公司 | 一种基于多类型传感器的停车管理方法及系统 |
| JP7473277B2 (ja) * | 2020-07-07 | 2024-04-23 | 株式会社Subaru | 車両の走行制御装置 |
| CN111795837A (zh) * | 2020-07-20 | 2020-10-20 | 重庆渝微电子技术研究院有限公司 | 一种简易的高级智能辅助驾驶系统检测系统及方法 |
| CN111814769A (zh) * | 2020-09-02 | 2020-10-23 | 深圳市城市交通规划设计研究中心股份有限公司 | 一种信息采集方法、装置、终端设备及存储介质 |
| CN113255540A (zh) * | 2021-06-01 | 2021-08-13 | 上海网车科技有限公司 | 一种基于毫米波雷达和摄像头融合的礼让行人系统及方法 |
| DE102021206563A1 (de) * | 2021-06-24 | 2022-12-29 | Robert Bosch Gesellschaft mit beschränkter Haftung | Bremssystem und Verfahren zum Betreiben eines Bremssystems |
| JP7692294B2 (ja) * | 2021-06-25 | 2025-06-13 | トヨタ自動車株式会社 | 降車支援装置 |
| CN113246975A (zh) * | 2021-06-28 | 2021-08-13 | 常州机电职业技术学院 | 一种汽车礼让行人智能辅助控制方法 |
| CN113529635B (zh) * | 2021-07-09 | 2022-12-23 | 上海熙众新能源技术有限公司 | 一种洒水控制方法、系统及智能洒水车 |
| CN114312794B (zh) * | 2022-01-12 | 2024-05-28 | 苏州挚途科技有限公司 | 车辆行驶恶劣天气环境的识别系统和方法 |
| JP7491326B2 (ja) * | 2022-01-21 | 2024-05-28 | トヨタ自動車株式会社 | 減速支援装置、減速支援方法、減速支援プログラム及び車両 |
| US11919451B2 (en) | 2022-02-28 | 2024-03-05 | Nissan North America, Inc. | Vehicle data display system |
| US12344244B2 (en) | 2022-02-28 | 2025-07-01 | Nissan North America, Inc. | Vehicle lane marking detection system |
| US20250326399A1 (en) * | 2022-03-31 | 2025-10-23 | Mobileye Vision Technologies Ltd. | Adaptive advanced driver-assistance system (adas) |
| CN115056775A (zh) * | 2022-06-17 | 2022-09-16 | 湖南信息学院 | 一种基于多传感器融合的汽车自动驾驶方法 |
| CN118810702B (zh) * | 2023-04-18 | 2026-02-10 | 比亚迪股份有限公司 | 一种车辆自动紧急制动的控制方法、电子设备及车辆 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2316822C1 (ru) * | 2006-04-06 | 2008-02-10 | Рязанский военный автомобильный институт имени генерала армии В.П. ДУБЫНИНА | Автоматическое устройство для предотвращения столкновений транспортного средства |
| JP2008234029A (ja) * | 2007-03-16 | 2008-10-02 | Sumitomo Electric Ind Ltd | 対象物検出システム及び対象物検出装置 |
| JP5320828B2 (ja) | 2008-06-04 | 2013-10-23 | 日産自動車株式会社 | 歩行者検出装置及び歩行者検出方法 |
| JP5210233B2 (ja) * | 2009-04-14 | 2013-06-12 | 日立オートモティブシステムズ株式会社 | 車両用外界認識装置及びそれを用いた車両システム |
| EP2743901B1 (en) * | 2011-08-10 | 2018-10-31 | Toyota Jidosha Kabushiki Kaisha | Driving assistance device |
| DE102011112985A1 (de) * | 2011-09-10 | 2013-03-14 | Daimler Ag | Verfahren zum Betrieb einer Sicherheitsvorrichtung eines Fahrzeuges und eine solche Sicherheitsvorrichtung |
| JP5492242B2 (ja) | 2012-03-29 | 2014-05-14 | 富士重工業株式会社 | 車両用運転支援装置 |
| JP5867267B2 (ja) | 2012-04-26 | 2016-02-24 | 日産自動車株式会社 | 歩行者検出装置及び歩行者検出方法 |
| JP6069938B2 (ja) | 2012-08-07 | 2017-02-01 | 日産自動車株式会社 | 飛び出し検出装置 |
| BR112015029578B1 (pt) | 2013-05-31 | 2021-12-14 | Toyota Jidosha Kabushiki Kaisha | Aparelho de auxílio à direção de veículo e computador de bordo |
| CN104648393A (zh) * | 2013-11-25 | 2015-05-27 | 青岛网媒软件有限公司 | 智能倒车安全装置及其工作方法 |
| JP6342172B2 (ja) * | 2014-01-31 | 2018-06-13 | 日野自動車株式会社 | 自動制動制御装置 |
| JP5991332B2 (ja) * | 2014-02-05 | 2016-09-14 | トヨタ自動車株式会社 | 衝突回避制御装置 |
-
2016
- 2016-11-28 JP JP2017562459A patent/JP6358409B2/ja active Active
- 2016-11-28 MX MX2018008919A patent/MX374457B/es active IP Right Grant
- 2016-11-28 WO PCT/JP2016/085130 patent/WO2017126226A1/ja not_active Ceased
- 2016-11-28 BR BR112018014840-7A patent/BR112018014840B1/pt not_active IP Right Cessation
- 2016-11-28 RU RU2018130061A patent/RU2687196C1/ru active
- 2016-11-28 EP EP16886465.0A patent/EP3407327B1/en active Active
- 2016-11-28 CN CN201680079466.2A patent/CN108475469B/zh active Active
- 2016-11-28 US US16/071,505 patent/US10576972B2/en active Active
- 2016-11-28 MY MYPI2018702514A patent/MY188558A/en unknown
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102243244B1 (ko) * | 2019-08-26 | 2021-04-23 | 엘지전자 주식회사 | 자율주행시스템에서 긴급단계에 따른 제어방법 및 이를 위한 장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| MY188558A (en) | 2021-12-22 |
| BR112018014840A2 (ja) | 2018-12-18 |
| EP3407327A1 (en) | 2018-11-28 |
| JPWO2017126226A1 (ja) | 2018-09-06 |
| US10576972B2 (en) | 2020-03-03 |
| MX2018008919A (es) | 2018-09-03 |
| EP3407327B1 (en) | 2022-04-20 |
| MX374457B (es) | 2025-03-06 |
| RU2687196C1 (ru) | 2019-05-07 |
| CN108475469A (zh) | 2018-08-31 |
| EP3407327A4 (en) | 2019-01-09 |
| WO2017126226A1 (ja) | 2017-07-27 |
| BR112018014840B1 (pt) | 2024-02-06 |
| CN108475469B (zh) | 2019-07-09 |
| US20190071074A1 (en) | 2019-03-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6358409B2 (ja) | 車両の運転支援制御方法及び制御装置 | |
| JP6358408B2 (ja) | 歩行者の判定方法及び判定装置 | |
| CN116118681B (zh) | 驾驶辅助装置 | |
| US10501122B2 (en) | Driving assistance device | |
| JP5715454B2 (ja) | 車両の運転支援装置 | |
| JP5919150B2 (ja) | 運転支援装置 | |
| JP6082638B2 (ja) | 走行制御装置及び走行制御システム | |
| EP3342665B1 (en) | Pedestrian collision prevention apparatus and method considering pedestrian gaze | |
| JP2012071677A (ja) | 車両の運転支援装置 | |
| CN111746515A (zh) | 车辆控制系统 | |
| JP2018097582A (ja) | 運転支援装置、及び運転支援方法 | |
| US11485356B2 (en) | Vehicle control device and control method | |
| US12377838B2 (en) | Driving assistance device, driving assistance method, and storage medium | |
| JP4204830B2 (ja) | 車両用運転支援装置 | |
| JP2023137966A (ja) | 運転支援装置、運転支援方法、およびプログラム | |
| CN109416887B (zh) | 识别控制对象车辆报知装置 | |
| JP2014000854A (ja) | 車両用後方警報装置 | |
| KR20250078054A (ko) | 전방 차량 브레이크 연동 자동 차로변경시스템 및 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A529 | Written submission of copy of amendment under article 34 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A5211 Effective date: 20180417 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180417 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20180417 |
|
| TRDD | Decision of grant or rejection written | ||
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20180516 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180522 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180604 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6358409 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |