JP6314371B2 - 移動体システム及び移動体の駆動方法 - Google Patents
移動体システム及び移動体の駆動方法 Download PDFInfo
- Publication number
- JP6314371B2 JP6314371B2 JP2013089408A JP2013089408A JP6314371B2 JP 6314371 B2 JP6314371 B2 JP 6314371B2 JP 2013089408 A JP2013089408 A JP 2013089408A JP 2013089408 A JP2013089408 A JP 2013089408A JP 6314371 B2 JP6314371 B2 JP 6314371B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- magnet
- control unit
- section
- irregular section
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 9
- VJYFKVYYMZPMAB-UHFFFAOYSA-N ethoprophos Chemical compound CCCSP(=O)(OCC)SCCC VJYFKVYYMZPMAB-UHFFFAOYSA-N 0.000 title 2
- 238000001514 detection method Methods 0.000 claims description 324
- 230000001788 irregular Effects 0.000 claims description 170
- 239000003990 capacitor Substances 0.000 claims description 27
- 230000003287 optical effect Effects 0.000 claims description 4
- 238000010586 diagram Methods 0.000 description 12
- 230000008859 change Effects 0.000 description 9
- 230000001360 synchronised effect Effects 0.000 description 6
- 230000000295 complement effect Effects 0.000 description 4
- 230000008569 process Effects 0.000 description 3
- 230000007423 decrease Effects 0.000 description 2
- 238000007599 discharging Methods 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000005355 Hall effect Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000001141 propulsive effect Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 239000000523 sample Substances 0.000 description 1
Images











Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P8/00—Arrangements for controlling dynamo-electric motors rotating step by step
- H02P8/005—Arrangements for controlling dynamo-electric motors rotating step by step of linear motors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L13/00—Electric propulsion for monorail vehicles, suspension vehicles or rack railways; Magnetic suspension or levitation for vehicles
- B60L13/03—Electric propulsion by linear motors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/0094—Structural association with other electrical or electronic devices
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K41/00—Propulsion systems in which a rigid body is moved along a path due to dynamo-electric interaction between the body and a magnetic field travelling along the path
- H02K41/02—Linear motors; Sectional motors
- H02K41/03—Synchronous motors; Motors moving step by step; Reluctance motors
- H02K41/031—Synchronous motors; Motors moving step by step; Reluctance motors of the permanent magnet type
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/15—Controlling commutation time
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K2213/00—Specific aspects, not otherwise provided for and not covered by codes H02K2201/00 - H02K2211/00
- H02K2213/03—Machines characterised by numerical values, ranges, mathematical expressions or similar information
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K29/00—Motors or generators having non-mechanical commutating devices, e.g. discharge tubes or semiconductor devices
- H02K29/03—Motors or generators having non-mechanical commutating devices, e.g. discharge tubes or semiconductor devices with a magnetic circuit specially adapted for avoiding torque ripples or self-starting problems
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Control Of Linear Motors (AREA)
- Control Of Multiple Motors (AREA)
- Control Of Vehicles With Linear Motors And Vehicles That Are Magnetically Levitated (AREA)
- Linear Motors (AREA)
Description
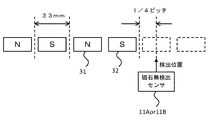
図1は、本実施形態に係る移動体システムを示すブロック図である。図1に示す移動体システムは、地上二次式リニアモータを利用したシステムである。この移動体システムは、移動体としての搬送台車1と、移動体の移動経路としての軌道(レール)2とを備える。軌道2にはS極とN極の磁石3が交互に所定のピッチで一列に配置されている。なお、図1に示す移動体システムは、例えば天井に設置された軌道2に沿って搬送台車1が走行する天井走行車のシステムである。また、本実施形態では、軌道2が数Km、搬送台車1が300台〜400台の移動体システムが想定されている。なお、本実施形態における移動体は搬送台車1に限定されず、搬送台車1以外の他の台車や、ロボットアーム等の移動体であってもよい。
図5は、制御部による駆動指令処理を示すフローチャートである。また、図6は、磁石無しの検出とモータの駆動との関係を示すタイミングチャートである。なお、図6において、(F)はフロント(前方)を意味し、(R)はリア(後方)を意味する。
次に、駆動制御部14A,14Bのインバータ145A,145Bに実装されているブートストラップ回路の構成について説明する。図7は、インバータに実装されるブートストラップ回路の構成を示す回路図である。インバータ145A,145Bは、ブートストラップ回路50を実装することにより、通常の回路構成ではIGBT(Insulated Gate Bipolar Transistor)の駆動用にそれぞれ必要な電源を、一方側の電源1つで動作させることができる。モータの始動時に、一方側のIGBTをターンオンさせることによって、コンデンサ(ブートストラップコンデンサ)に電荷をチャージする。そして、駆動中はコンデンサを反対側の駆動用の電源として使用する。
図10は、制御部による位置指令処理を示すフローチャートである。図10に示すように、制御部13は、上述したように、常時、第1位置検出センサ12A及び第2位置検出センサ12Bからの検出信号を監視している。そして、制御部13は、第1位置検出センサ12Aからの検出信号に基づいて搬送台車1の現在位置を特定する(ステップS11)。
2 軌道(移動経路)
3 磁石
10A 第1モータ(モータ)
10B 第2モータ(モータ)
11A 第1磁石無検出センサ(検出部)
11B 第2磁石無検出センサ(検出部)
12A 第1位置検出センサ(第1位置検出部)
12B 第2位置検出センサ(第2位置検出部)
13 制御部
14 駆動制御部
31 N極の磁石
32 S極の磁石
50 ブートストラップ回路
60 ブートストラップコンデンサ
Claims (12)
- S極とN極の磁石を交互に配置した移動経路と、この移動経路に沿って移動する移動体とを備える移動体システムであって、
前記移動体は、
移動方向において異なる位置に配置される複数のモータと、
前記複数のモータの駆動を制御する駆動制御部と、
を有し、
前記複数のモータのうちの一のモータが前記磁石の磁極の配置が規則的でない不規則区間に位置したときに、前記一のモータ以外のモータのうちの少なくとも1つのモータが前記不規則区間でない区間に位置し、
前記駆動制御部は、前記不規則区間に位置するモータの駆動を停止することを特徴とする移動体システム。 - 前記不規則区間は、前記磁石が配置されていない区間であることを特徴とする請求項1に記載の移動体システム。
- 前記不規則区間は、前記S極とN極の磁石が交互に配置されていない区間であることを特徴とする請求項1に記載の移動体システム。
- 前記不規則区間は、前記複数のモータのうちの前記移動方向における両端に配置されるモータ間の距離よりも短いことを特徴とする請求項1〜請求項3のうちいずれか1項に記載の移動体システム。
- 前記移動体は、前記不規則区間を検出する検出部を有し、
前記駆動制御部は、前記検出部による前記不規則区間の検出に基づいて前記モータの駆動を停止することを特徴とする請求項1〜請求項4のうちいずれか1項に記載の移動体システム。 - 前記検出部は、前記不規則区間に加えて、前記磁石の磁極の配置が規則的である規則区間を検出し、
前記駆動制御部は、前記検出部が前記不規則区間を検出した後に前記規則区間を検出した場合に、停止していた前記モータの駆動を再開することを特徴とする請求項5に記載の移動体システム。 - 前記検出部は、前記磁石を検出することにより、前記不規則区間に加えて、前記磁石の磁極の配置が規則的である規則区間を検出し、
前記駆動制御部は、前記検出部が前記不規則区間を検出した後に、前記規則区間において最初の磁石から複数個の磁石を連続して検出した場合に、停止していた前記モータの駆動を再開することを特徴とする請求項6に記載の移動体システム。 - 前記検出部は、前記複数のモータ毎に設けられることを特徴とする請求項5〜請求項7のうちいずれか1項に記載の移動体システム。
- 前記検出部は、前記磁石を検出する光学式センサであることを特徴とする請求項5〜請求項8のうちいずれか1項に記載の移動体システム。
- 前記検出部は、前記不規則区間の検出と前記移動体の位置検出とを兼ねていることを特徴とする請求項5〜請求項9のうちいずれか1項に記載の移動体システム。
- 前記駆動制御部は、ブートストラップ回路を含み、
このブートストラップ回路のブートストラップコンデンサは、前記モータを停止させた時間と前記モータの駆動に必要な電圧と前記ブートストラップコンデンサのチャージポンプ特性とに応じた充電時間で充電されることを特徴とする請求項1〜請求項10のうちいずれか1項に記載の移動体システム。 - S極とN極の磁石を交互に配置した移動経路に沿って移動する移動体の駆動方法であって、
前記移動体の移動方向において異なる位置に配置される複数のモータのうちの一のモータが前記磁石の磁極の配置が規則的でない不規則区間に位置しているときに、前記一のモータの駆動を停止することを特徴とする移動体の駆動方法。
Priority Applications (9)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013089408A JP6314371B2 (ja) | 2013-04-22 | 2013-04-22 | 移動体システム及び移動体の駆動方法 |
| US14/785,779 US9871478B2 (en) | 2013-04-22 | 2014-04-03 | Moving body system and method for driving moving body |
| KR1020157030304A KR101900721B1 (ko) | 2013-04-22 | 2014-04-03 | 이동체 시스템 및 이동체의 구동 방법 |
| CN201480022186.9A CN105142970B (zh) | 2013-04-22 | 2014-04-03 | 移动体系统以及移动体的驱动方法 |
| EP14788736.8A EP2990259B1 (en) | 2013-04-22 | 2014-04-03 | Moving body system and drive method of moving body |
| SG11201508622YA SG11201508622YA (en) | 2013-04-22 | 2014-04-03 | Moving body system and drive method of moving body |
| PCT/JP2014/059843 WO2014175032A1 (ja) | 2013-04-22 | 2014-04-03 | 移動体システム及び移動体の駆動方法 |
| TW103113855A TWI606941B (zh) | 2013-04-22 | 2014-04-16 | Mobile system and mobile body driving method |
| IL242191A IL242191B (en) | 2013-04-22 | 2015-10-20 | Moving body system and mdrive method of moving body |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013089408A JP6314371B2 (ja) | 2013-04-22 | 2013-04-22 | 移動体システム及び移動体の駆動方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014217076A JP2014217076A (ja) | 2014-11-17 |
| JP2014217076A5 JP2014217076A5 (ja) | 2016-02-04 |
| JP6314371B2 true JP6314371B2 (ja) | 2018-04-25 |
Family
ID=51791613
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013089408A Active JP6314371B2 (ja) | 2013-04-22 | 2013-04-22 | 移動体システム及び移動体の駆動方法 |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US9871478B2 (ja) |
| EP (1) | EP2990259B1 (ja) |
| JP (1) | JP6314371B2 (ja) |
| KR (1) | KR101900721B1 (ja) |
| CN (1) | CN105142970B (ja) |
| IL (1) | IL242191B (ja) |
| SG (1) | SG11201508622YA (ja) |
| TW (1) | TWI606941B (ja) |
| WO (1) | WO2014175032A1 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3339088B1 (en) * | 2015-08-21 | 2020-01-08 | Murata Machinery, Ltd. | Mobile body |
| JP6206458B2 (ja) * | 2015-08-21 | 2017-10-04 | 村田機械株式会社 | 移動体、及び、移動体の位置検出方法 |
| JP6653179B2 (ja) * | 2016-01-14 | 2020-02-26 | Thk株式会社 | リニアモータの制御装置及び制御方法 |
| US10184813B2 (en) * | 2016-11-09 | 2019-01-22 | The Boeing Company | System and method for performing an automated inspection operation |
| US20190061558A1 (en) * | 2017-08-31 | 2019-02-28 | Rockwell Automation Technologies, Inc. | Systems and methods for sensing parameters on movers in linear motor systems |
| JP7502936B2 (ja) * | 2020-03-30 | 2024-06-19 | 住友重機械工業株式会社 | リニアモータ搬送システムおよびその運用方法 |
| US11774521B2 (en) * | 2021-01-20 | 2023-10-03 | Hiwin Mikrosystem Corp. | Position measuring mechanism and measuring method of linear motion system |
Family Cites Families (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59201605A (ja) | 1983-04-28 | 1984-11-15 | Hitachi Ltd | リニアモ−タ応用電動車の制御装置 |
| JPH0810962B2 (ja) * | 1984-06-29 | 1996-01-31 | 株式会社日立製作所 | リニアモ−タカ−の走行装置 |
| JPH0734601B2 (ja) * | 1985-04-05 | 1995-04-12 | 株式会社日立製作所 | リニアモータ式電気車の制御装置 |
| JPH07112321B2 (ja) * | 1986-07-15 | 1995-11-29 | 財団法人鉄道総合技術研究所 | 位置検出装置 |
| JP2700686B2 (ja) * | 1989-04-13 | 1998-01-21 | 株式会社ダイフク | 磁気浮上式の搬送設備 |
| US5130583A (en) | 1989-11-13 | 1992-07-14 | Ricoh Company, Ltd. | Linear motor |
| JP2783620B2 (ja) * | 1989-11-13 | 1998-08-06 | 株式会社リコー | 可動コイル型リニアモータ |
| JP2815655B2 (ja) | 1989-11-17 | 1998-10-27 | 株式会社リコー | 可動マグネット型リニアモータ |
| US5175455A (en) * | 1990-10-31 | 1992-12-29 | Otis Elevator Company | Permanent magnet linear door motor |
| JP2880815B2 (ja) * | 1991-03-25 | 1999-04-12 | 株式会社東芝 | リニアモータカーの走行制御装置 |
| JP3235708B2 (ja) * | 1995-09-28 | 2001-12-04 | 株式会社ダイフク | リニアモータ利用の搬送設備 |
| JP3436070B2 (ja) * | 1997-05-15 | 2003-08-11 | 株式会社ダイフク | 搬送設備 |
| JP3661395B2 (ja) * | 1998-03-04 | 2005-06-15 | 松下電器産業株式会社 | 動力発生装置とこれを用いた電気洗濯機 |
| JP2000245128A (ja) | 1999-02-22 | 2000-09-08 | Nkk Corp | リニア同期モータ |
| JP3395155B2 (ja) | 1999-05-07 | 2003-04-07 | 株式会社日立製作所 | リニアモータ及びその製造方法 |
| JP2001112119A (ja) | 1999-10-05 | 2001-04-20 | Toyota Autom Loom Works Ltd | リニアモータ式搬送装置 |
| JP3349137B2 (ja) * | 1999-10-13 | 2002-11-20 | 東海旅客鉄道株式会社 | 車両推進装置 |
| JP3755366B2 (ja) * | 2000-01-19 | 2006-03-15 | 株式会社ダイフク | 荷搬送設備 |
| JP4239382B2 (ja) * | 2000-08-24 | 2009-03-18 | 株式会社Ihi | 搬送装置 |
| JP4084109B2 (ja) * | 2002-07-05 | 2008-04-30 | 株式会社ソディック | 移動体駆動装置 |
| JP4506319B2 (ja) | 2004-07-15 | 2010-07-21 | ムラテックオートメーション株式会社 | リニアモータ式搬送装置 |
| JP4813056B2 (ja) * | 2004-07-29 | 2011-11-09 | パナソニック株式会社 | 部品実装用実装ヘッド、及び該実装ヘッドを備える部品実装装置 |
| JPWO2007116507A1 (ja) * | 2006-03-31 | 2009-08-20 | 株式会社日立製作所 | リニアモータ |
| CN101803161B (zh) * | 2007-09-14 | 2012-11-07 | Thk株式会社 | 线性电动机以及降低线性电动机的齿槽效应的方法 |
| JP5486874B2 (ja) | 2009-08-28 | 2014-05-07 | Thk株式会社 | 分散配置リニアモータおよび分散配置リニアモータの制御方法 |
| JP4941790B2 (ja) * | 2009-08-28 | 2012-05-30 | 村田機械株式会社 | 移動体システム |
| JP5421709B2 (ja) * | 2009-09-30 | 2014-02-19 | Thk株式会社 | リニアモータの駆動システム及び制御方法 |
| WO2011100971A2 (en) * | 2010-02-18 | 2011-08-25 | Danfoss Drives A/S | Method for implementing bootstrap-supply charging in a motor controller at energized motor and motor controller using such a method |
| JP5556896B2 (ja) * | 2010-10-26 | 2014-07-23 | 村田機械株式会社 | 搬送システム |
| EP2714339B1 (en) * | 2011-06-02 | 2018-01-03 | Black & Decker Inc. | Control system for a fastening power tool |
-
2013
- 2013-04-22 JP JP2013089408A patent/JP6314371B2/ja active Active
-
2014
- 2014-04-03 CN CN201480022186.9A patent/CN105142970B/zh active Active
- 2014-04-03 EP EP14788736.8A patent/EP2990259B1/en active Active
- 2014-04-03 WO PCT/JP2014/059843 patent/WO2014175032A1/ja active Application Filing
- 2014-04-03 KR KR1020157030304A patent/KR101900721B1/ko active IP Right Grant
- 2014-04-03 SG SG11201508622YA patent/SG11201508622YA/en unknown
- 2014-04-03 US US14/785,779 patent/US9871478B2/en active Active
- 2014-04-16 TW TW103113855A patent/TWI606941B/zh active
-
2015
- 2015-10-20 IL IL242191A patent/IL242191B/en active IP Right Grant
Also Published As
| Publication number | Publication date |
|---|---|
| SG11201508622YA (en) | 2015-11-27 |
| CN105142970B (zh) | 2018-06-26 |
| US9871478B2 (en) | 2018-01-16 |
| EP2990259A1 (en) | 2016-03-02 |
| KR20150132875A (ko) | 2015-11-26 |
| TWI606941B (zh) | 2017-12-01 |
| TW201446572A (zh) | 2014-12-16 |
| IL242191B (en) | 2019-01-31 |
| EP2990259B1 (en) | 2018-03-07 |
| US20160072419A1 (en) | 2016-03-10 |
| KR101900721B1 (ko) | 2018-09-20 |
| WO2014175032A1 (ja) | 2014-10-30 |
| EP2990259A4 (en) | 2016-12-14 |
| JP2014217076A (ja) | 2014-11-17 |
| CN105142970A (zh) | 2015-12-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6314372B2 (ja) | 位置検出装置、位置検出方法、及び移動体システム | |
| JP6314371B2 (ja) | 移動体システム及び移動体の駆動方法 | |
| JP4941790B2 (ja) | 移動体システム | |
| KR101584022B1 (ko) | 반송 시스템 | |
| CN106612095B (zh) | 动磁式线性马达控制系统及部件制造方法 | |
| EP2599186B1 (en) | System and method for providing power to a moving element | |
| US10745203B2 (en) | Transport system, control method, processing system, and manufacturing method of article | |
| CN107848437B (zh) | 移动体 | |
| US9716459B2 (en) | Mobile body, mobile body system, and position detecting method for mobile body | |
| JP6191665B2 (ja) | 移動体 | |
| US9768721B2 (en) | Mobile body and mobile body system | |
| JP3709779B2 (ja) | リニア搬送装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151211 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160223 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161004 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20161128 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170808 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170928 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180227 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180312 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6314371 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |