JP6270186B2 - トルクセンサ - Google Patents
トルクセンサ Download PDFInfo
- Publication number
- JP6270186B2 JP6270186B2 JP2016571656A JP2016571656A JP6270186B2 JP 6270186 B2 JP6270186 B2 JP 6270186B2 JP 2016571656 A JP2016571656 A JP 2016571656A JP 2016571656 A JP2016571656 A JP 2016571656A JP 6270186 B2 JP6270186 B2 JP 6270186B2
- Authority
- JP
- Japan
- Prior art keywords
- axis
- connection point
- support
- annular
- connection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/04—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft
- G01L3/10—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/04—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft
- G01L3/10—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating
- G01L3/106—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating involving electrostatic means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/04—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft
- G01L3/10—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating
- G01L3/108—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating involving resistance strain gauges
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/14—Rotary-transmission dynamometers wherein the torque-transmitting element is other than a torsionally-flexible shaft
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/14—Rotary-transmission dynamometers wherein the torque-transmitting element is other than a torsionally-flexible shaft
- G01L3/1407—Rotary-transmission dynamometers wherein the torque-transmitting element is other than a torsionally-flexible shaft involving springs
- G01L3/1428—Rotary-transmission dynamometers wherein the torque-transmitting element is other than a torsionally-flexible shaft involving springs using electrical transducers
- G01L3/1457—Rotary-transmission dynamometers wherein the torque-transmitting element is other than a torsionally-flexible shaft involving springs using electrical transducers involving resistance strain gauges
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Force Measurement Appropriate To Specific Purposes (AREA)
- Manipulator (AREA)
- Power Steering Mechanism (AREA)
Description
一方、トルクの作用により環状部材の形状を変形させ、この変形態様を電気的に検出するトルクセンサも提案されている。たとえば、特許文献5には、トルクの作用により環状部材の形状を径方向に変形させるリンク機構を用意し、環状部材の変形によってその径方向に加わる力を荷重センサで検出するトルクセンサが開示されており、特許文献6には、環状部材の各部の伸縮状態をストレーンゲージで検出するトルクセンサが開示されている。
また、たとえば、特許文献7,8には、構造体各部に生じる変位を電気的に検出する手段として、容量素子を用いる方法が開示されている。容量素子は、対向する一対の電極によって構成することができ、両電極間の距離を静電容量値として検出することができるので、センサ用の変位検出手段に適している。そこで、特許文献9には、トルクの作用により環状部材の形状を変形させ、この変形に起因して生じる各部の変位を容量素子によって検出するトルクセンサが提案されている。
このような観点において、上述した特許文献9に開示されているトルクセンサ(以下、本願では、「先願トルクセンサ」と呼ぶ)は、小型で高剛性をもったセンサとしての資質に恵まれている。この先願トルクセンサでは、弾性変形を生じる環状変形体の所定点が、左右両側に配置された支持体によって支持される。そして、環状変形体に生じた径方向の変形を容量素子の静電容量値の変化として検出する方法が採られる。具体的には、容量素子を構成する一方の電極(変位電極)を環状変形体の内側面もしくは外側面に形成し、これに対向する他方の電極(固定電極)を支持体に固定する構造を採用している。このため、小型で高剛性をもち、構造が単純なトルクセンサを実現することができる。
しかしながら、この先願トルクセンサでは、変位電極は、環状変形体の内側面もしくは外側面に形成すれば足りるが、固定電極は、この変位電極に対向した位置に支持固定する必要があるため、固定電極の構造は複雑にならざるを得ない。しかも、変位電極に対する固定電極の相対位置は、検出精度に影響を与える重大な要因になるため、固定電極の位置調整に多大な作業負担が必要になる。特に、複数の容量素子を対称性をもたせて配置し、これらを用いて差分検出を行う場合、個々の容量素子ごとに対向電極が平行になるようにするとともに、複数の容量素子についての電極間隔が互いに等しくなるような調整が必要になる。このため、商業的に利用する上では、生産効率が低下し、コストが高騰するという問題がある。
そこで本発明は、小型で高剛性をもち、高い生産効率が実現可能なトルクセンサを提供することを目的とする。
回転軸に直交する基本平面上に、回転軸の周囲を取り囲むように基本環状路を定義したときに、この基本環状路に沿って伸びる環状変形体と、
回転軸が左右に伸びる水平線をなすような基準観察方向から見たときに、環状変形体の左側に隣接する位置に配置された左側支持体と、
基準観察方向から見たときに、環状変形体の右側に隣接する位置に配置された右側支持体と、
環状変形体の左側の側面上の左側接続点を、左側支持体に接続する左側接続部材と、
環状変形体の右側の側面上の右側接続点を、右側支持体に接続する右側接続部材と、
環状変形体の右側の側面の所定位置に固定された変位電極と、右側支持体の変位電極に対向する位置に固定された固定電極と、によって構成される容量素子と、
容量素子の静電容量値の変動に基づいて、左側支持体および右側支持体の一方に負荷がかかった状態において他方に作用した回転軸まわりのトルクを示す電気信号を出力する検出回路と、
を設け、
環状変形体は、基本環状路上に定義された検出点に位置する検出部と、この検出部の両端に接続された連結部と、を有し、
検出部は、検出対象となるトルクの作用により弾性変形を生じる第1の変形部と、検出対象となるトルクの作用により弾性変形を生じる第2の変形部と、第1の変形部および第2の変形部の弾性変形により変位を生じる変位部と、を有し、
第1の変形部の外側端はこれに隣接する連結部に接続され、第1の変形部の内側端は変位部に接続され、第2の変形部の外側端はこれに隣接する連結部に接続され、第2の変形部の内側端は変位部に接続され、
変位電極は、変位部の右側支持体に対向する位置に固定され、
左側接続点および右側接続点は、連結部に配置されており、基本平面への左側接続点の正射影投影像と基本平面への右側接続点の正射影投影像とは、互いに異なる位置に形成されるようにしたものである。
(2) 本発明の第2の態様は、上述した第1の態様に係るトルクセンサにおいて、
基本環状路上に複数n個(n≧2)の検出点が定義され、各検出点にそれぞれ検出部が位置しており、環状変形体が、n個の検出部とn個の連結部とを、基本環状路に沿って交互に配置することにより構成されているようにしたものである。
(3) 本発明の第3の態様は、上述した第2の態様に係るトルクセンサにおいて、
基本環状路上に偶数n個(n≧2)の検出点が定義され、各検出点にそれぞれ検出部が位置しており、環状変形体が、n個の検出部とn個の連結部とを、基本環状路に沿って交互に配置することにより構成されているようにしたものである。
(4) 本発明の第4の態様は、上述した第3の態様に係るトルクセンサにおいて、
偶数n個の連結部に対して、基本環状路に沿って順に番号を付与したときに、右側接続点が奇数番目の連結部に配置され、左側接続点が偶数番目の連結部に配置されているようにしたものである。
(5) 本発明の第5の態様は、上述した第4の態様に係るトルクセンサにおいて、
n=2に設定することにより、基本環状路に沿って、第1の連結部、第1の検出部、第2の連結部、第2の検出部を、この順序で配置することにより環状変形体が構成されており、右側接続点が第1の連結部に配置され、左側接続点が第2の連結部に配置されているようにしたものである。
(6) 本発明の第6の態様は、上述した第4の態様に係るトルクセンサにおいて、
n=4に設定することにより、基本環状路に沿って、第1の連結部、第1の検出部、第2の連結部、第2の検出部、第3の連結部、第3の検出部、第4の連結部、第4の検出部を、この順序で配置することにより環状変形体が構成されており、第1の右側接続点が第1の連結部に配置され、第1の左側接続点が第2の連結部に配置され、第2の右側接続点が第3の連結部に配置され、第2の左側接続点が第4の連結部に配置され、
左側接続部材が、第1の左側接続点と左側支持体とを接続する第1の左側接続部材と、第2の左側接続点と左側支持体とを接続する第2の左側接続部材とを有し、
右側接続部材が、第1の右側接続点と右側支持体とを接続する第1の右側接続部材と、第2の右側接続点と右側支持体とを接続する第2の右側接続部材とを有するようにしたものである。
(7) 本発明の第7の態様は、上述した第6の態様に係るトルクセンサにおいて、
基本平面上に、回転軸との交点を通り互いに直交する2直線を引いた場合に、第1の左側接続点および第2の左側接続点の正射影投影像が第1の直線上に配置され、第1の右側接続点および第2の右側接続点の正射影投影像が第2の直線上に配置されているようにしたものである。
(8) 本発明の第8の態様は、上述した第6の態様に係るトルクセンサにおいて、
XYZ三次元座標系におけるZ軸まわりのトルクを検出するために、環状変形体が原点Oを中心として基本平面となるXY平面上に配置され、左側支持体がZ軸負領域に配置され、右側支持体がZ軸正領域に配置され、
環状変形体のZ軸負側の側面上に第1の左側接続点および第2の左側接続点が設けられ、環状変形体のZ軸正側の側面上に第1の右側接続点および第2の右側接続点が設けられ、
環状変形体の両側面をXY平面上に投影して正射影投影像を得た場合に、第1の右側接続点の投影像が正のX軸上、第2の右側接続点の投影像が負のX軸上、第1の左側接続点の投影像が正のY軸上、第2の左側接続点の投影像が負のY軸上に配置されており、
XY平面上において、原点Oを中心としてX軸を反時計まわりに45°回転させた座標軸としてV軸を定義し、原点Oを中心としてY軸を反時計まわりに45°回転させた座標軸としてW軸を定義した場合に、第1の検出点が正のV軸上、第2の検出点が正のW軸上、第3の検出点が負のV軸上、第4の検出点が負のW軸上に配置されているようにしたものである。
(9) 本発明の第9の態様は、上述した第4の態様に係るトルクセンサにおいて、
n=8に設定することにより、基本環状路に沿って、第1の連結部、第1の検出部、第2の連結部、第2の検出部、第3の連結部、第3の検出部、第4の連結部、第4の検出部、第5の連結部、第5の検出部、第6の連結部、第6の検出部、第7の連結部、第7の検出部、第8の連結部、第8の検出部を、この順序で配置することにより環状変形体が構成されており、第1の左側接続点が第1の連結部に配置され、第1の右側接続点が第2の連結部に配置され、第2の左側接続点が第3の連結部に配置され、第2の右側接続点が第4の連結部に配置され、第3の左側接続点が第5の連結部に配置され、第3の右側接続点が第6の連結部に配置され、第4の左側接続点が第7の連結部に配置され、第4の右側接続点が第8の連結部に配置され、
左側接続部材が、第1の左側接続点と左側支持体とを接続する第1の左側接続部材と、第2の左側接続点と左側支持体とを接続する第2の左側接続部材と、第3の左側接続点と左側支持体とを接続する第3の左側接続部材と、第4の左側接続点と左側支持体とを接続する第4の左側接続部材とを有し、
右側接続部材が、第1の右側接続点と右側支持体とを接続する第1の右側接続部材と、第2の右側接続点と右側支持体とを接続する第2の右側接続部材と、第3の右側接続点と右側支持体とを接続する第3の右側接続部材と、第4の右側接続点と右側支持体とを接続する第4の右側接続部材とを有するようにしたものである。
(10) 本発明の第10の態様は、上述した第9の態様に係るトルクセンサにおいて、
基本平面上に、回転軸との交点を通り45°ずつの角度偏差をもって交差する4直線を引いた場合に、第1の左側接続点および第3の左側接続点の正射影投影像が第1の直線上に配置され、第1の右側接続点および第3の右側接続点の正射影投影像が第2の直線上に配置され、第2の左側接続点および第4の左側接続点の正射影投影像が第3の直線上に配置され、第2の右側接続点および第4の右側接続点の正射影投影像が第4の直線上に配置されているようにしたものである。
(11) 本発明の第11の態様は、上述した第9の態様に係るトルクセンサにおいて、
XYZ三次元座標系におけるZ軸まわりのトルクを検出するために、環状変形体が原点Oを中心として基本平面となるXY平面上に配置され、左側支持体がZ軸負領域に配置され、右側支持体がZ軸正領域に配置され、
環状変形体のZ軸負側の側面上に第1〜第4の左側接続点が設けられ、環状変形体のZ軸正側の側面上に第1〜第4の右側接続点が設けられ、
XY平面上において、原点Oを中心としてX軸を反時計まわりに45°回転させた座標軸としてV軸を定義し、原点Oを中心としてY軸を反時計まわりに45°回転させた座標軸としてW軸を定義し、環状変形体の両側面をXY平面上に投影して正射影投影像を得た場合に、第1の左側接続点の投影像が正のX軸上、第2の左側接続点の投影像が正のY軸上、第3の左側接続点の投影像が負のX軸上、第4の左側接続点の投影像が負のY軸上に配置されており、第1の右側接続点の投影像が正のV軸上、第2の右側接続点の投影像が正のW軸上、第3の右側接続点の投影像が負のV軸上、第4の右側接続点の投影像が負のW軸上に配置されており、
XY平面上において、原点Oを起点として、X軸正方向に対して反時計まわりに角度θをなす方位ベクトルVec(θ)を定義したときに、第i番目の検出点(1≦i≦8)が、方位ベクトルVec(π/8+(i−1)・π/4)と基本環状路との交点位置に配置されているようにしたものである。
(12) 本発明の第12の態様は、上述した第2〜第11の態様に係るトルクセンサにおいて、
複数n個の検出部のうち、一部は第1属性の検出部であり、他の一部は第2属性の検出部であり、
第1属性の検出部を構成する第1属性変位部は、第1の回転方向のトルクが作用したときに右側支持体から遠ざかる方向に変位し、第1の回転方向とは逆の第2の回転方向のトルクが作用したときに右側支持体に近づく方向に変位し、
第2属性の検出部を構成する第2属性変位部は、第1の回転方向のトルクが作用したときに右側支持体に近づく方向に変位し、第2の回転方向のトルクが作用したときに右側支持体から遠ざかる方向に変位し、
第1属性変位部に固定された第1属性変位電極と、右側支持体の第1属性変位電極に対向する位置に固定された第1属性固定電極と、によって第1属性容量素子が構成され、
第2属性変位部に固定された第2属性変位電極と、右側支持体の第2属性変位電極に対向する位置に固定された第2属性固定電極と、によって第2属性容量素子が構成され、
検出回路が、第1属性容量素子の静電容量値と、第2属性容量素子の静電容量値と、の差に相当する電気信号を、作用したトルクを示す電気信号として出力するようにしたものである。
(13) 本発明の第13の態様は、上述した第1〜第12の態様に係るトルクセンサにおいて、
第1の変形部、第2の変形部、変位部を有する検出部が、一方の連結部端部と他方の連結部端部との間に配置されており、
第1の変形部は、可撓性を有する第1の板状片によって構成され、第2の変形部は、可撓性を有する第2の板状片によって構成され、変位部は、第3の板状片によって構成され、
第1の板状片の外側端は、一方の連結部端部に接続され、第1の板状片の内側端は、第3の板状片の一端に接続され、第2の板状片の外側端は、他方の連結部端部に接続され、第2の板状片の内側端は、第3の板状片の他端に接続されているようにしたものである。
(14) 本発明の第14の態様は、上述した第13の態様に係るトルクセンサにおいて、
トルクが作用していない状態において、第3の板状片と右側支持体の対向面とが平行を維持するようにしたものである。
(15) 本発明の第15の態様は、上述した第14の態様に係るトルクセンサにおいて、
検出点の位置に基本平面に直交する法線を立てたときに、当該検出点に位置する検出部を構成する第1の板状片および第2の板状片が、法線に対して傾斜しており、かつ、第1の板状片の傾斜方向と第2の板状片の傾斜方向とが逆向きとなっているようにしたものである。
(16) 本発明の第16の態様は、上述した第1〜第15の態様に係るトルクセンサにおいて、
左側接続点を通り回転軸に平行な接続参照線を定義したときに、環状変形体の連結部の右側の側面と右側支持体の対向面との間に、接続参照線上もしくはその近傍に配置された補助接続部材を更に設けるようにしたものである。
(17) 本発明の第17の態様は、上述した第16の態様に係るトルクセンサにおいて、
補助接続部材として、接続参照線に沿った方向に力が作用したときに比べて、接続参照線に直交する方向に力が作用したときの方が、弾性変形を生じ易い部材を用いるようにしたものである。
(18) 本発明の第18の態様は、上述した第16または第17の態様に係るトルクセンサにおいて、
環状変形体の補助接続部材に対する接続部分、もしくは、右側支持体の補助接続部材に対する接続部分、または、これら接続部分の双方を、ダイアフラム部によって構成し、トルクの作用に基づくダイアフラム部の変形によって補助接続部材が接続参照線に対して傾斜するようにしたものである。
(19) 本発明の第19の態様は、上述した第18の態様に係るトルクセンサにおいて、
環状変形体の補助接続部材に対する接続部分をダイアフラム部によって構成し、
左側接続部材が、環状変形体のダイアフラム部を避け、その周囲部分に接続されるようにしたものである。
(20) 本発明の第20の態様は、上述した第1〜第19の態様に係るトルクセンサにおいて、
左側支持体および右側支持体として、中心部に貫通開口部を有する環状の構造体を用い、回転軸に沿って、左側支持体、環状変形体、右側支持体の各貫通開口部を貫く挿通孔が確保されるようにしたものである。
(21) 本発明の第21の態様は、上述した第1〜第20の態様に係るトルクセンサにおいて、
環状変形体が、回転軸を中心軸として配置された円盤の中央部に、より径の小さな同心円盤の形状をした貫通開口部を形成することにより得られる円環状の部材に対して、部分的な材料除去加工を施すことにより得られた部材であり、材料除去加工を施した部分によって検出部が構成されるようにしたものである。
(22) 本発明の第22の態様は、上述した第1〜第21の態様に係るトルクセンサにおいて、
左側支持体および右側支持体が、回転軸を中心軸として配置された円盤の中央部に、より径の小さな同心円盤の形状をした貫通開口部を形成することにより得られる円環状の部材からなるようにしたものである。
(23) 本発明の第23の態様は、上述した第1〜第22の態様に係るトルクセンサにおいて、
左側接続部材が、左側支持体の右側面から右方に突出した凸状部によって構成され、右側接続部材が、右側支持体の左側面から左方に突出した凸状部によって構成され、各凸状部の頂面が環状変形体の各接続点の位置に接合されているようにしたものである。
(24) 本発明の第24の態様は、上述した第1〜第23の態様に係るトルクセンサにおいて、
所定回転方向のトルクが作用した結果、固定電極に対する変位電極の相対位置が変化した場合にも、容量素子を構成する一対の電極の実効対向面積が変化しないように、固定電極および変位電極のうちの一方の面積を他方の面積よりも大きく設定したものである。
(25) 本発明の第25の態様は、上述した第1〜第24の態様に係るトルクセンサにおいて、
左側支持体、右側支持体、環状変形体が導電性材料により構成されており、変位電極が変位部の表面に絶縁層を介して形成されており、固定電極が右側支持体の表面に絶縁層を介して形成されているようにしたものである。
(26) 本発明の第26の態様は、上述した第1〜第24の態様に係るトルクセンサにおいて、
左側支持体、右側支持体、環状変形体が導電性材料により構成されており、環状変形体の表面の一部の領域によって変位電極を構成するか、もしくは、右側支持体の表面の一部の領域によって固定電極を構成したものである。
(27) 本発明の第27の態様は、所定の回転軸まわりのトルクを検出するトルクセンサにおいて、
回転軸に直交する基本平面上に、回転軸の周囲を取り囲むように基本環状路を定義したときに、この基本環状路に沿って伸びる環状変形体と、
回転軸が左右に伸びる水平線をなすような基準観察方向から見たときに、環状変形体の左側に隣接する位置に配置された作用支持体と、
基準観察方向から見たときに、環状変形体の右側に隣接する位置に配置された固定支持体と、
環状変形体の所定箇所に設けられた作用接続点を、作用支持体に接続する作用接続部材と、
環状変形体の所定箇所に設けられた固定接続点を、固定支持体に接続する固定接続部材と、
環状変形体の右側の側面の所定位置に固定された変位電極と、固定支持体の変位電極に対向する位置に固定された固定電極と、によって構成される容量素子と、
容量素子の静電容量値の変動に基づいて、作用支持体および固定支持体の一方に負荷がかかった状態において他方に作用した回転軸まわりのトルクを示す電気信号を出力する検出回路と、
を設け、
環状変形体は、基本環状路上に定義された検出点に位置する検出部と、この検出部の両端に接続された連結部と、を有し、
検出部は、検出対象となるトルクの作用により弾性変形を生じる第1の変形部と、検出対象となるトルクの作用により弾性変形を生じる第2の変形部と、第1の変形部および第2の変形部の弾性変形により変位を生じる変位部と、を有し、
第1の変形部の外側端はこれに隣接する連結部に接続され、第1の変形部の内側端は変位部に接続され、第2の変形部の外側端はこれに隣接する連結部に接続され、第2の変形部の内側端は変位部に接続され、
変位電極は、変位部の固定支持体に対向する位置に固定され、
作用接続点および固定接続点は、連結部に配置されており、基本平面への作用接続点の正射影投影像と基本平面への固定接続点の正射影投影像とは、互いに異なる位置に形成されるようにしたものである。
(28) 本発明の第28の態様は、所定の回転軸まわりのトルクを検出するトルクセンサにおいて、
回転軸に直交する基本平面上に、回転軸の周囲を取り囲むように基本環状路を定義したときに、この基本環状路に沿って伸びる環状変形体と、
環状変形体の外側もしくは内側に隣接する位置に配置された作用支持体と、
回転軸が左右に伸びる水平線をなすような基準観察方向から見たときに、環状変形体の右側に隣接する位置に配置された固定支持体と、
環状変形体の所定箇所に設けられた作用接続点を、作用支持体に接続する作用接続部材と、
環状変形体の所定箇所に設けられた固定接続点を、固定支持体に接続する固定接続部材と、
環状変形体の右側の側面の所定位置に固定された変位電極と、固定支持体の変位電極に対向する位置に固定された固定電極と、によって構成される容量素子と、
容量素子の静電容量値の変動に基づいて、作用支持体および固定支持体の一方に負荷がかかった状態において他方に作用した回転軸まわりのトルクを示す電気信号を出力する検出回路と、
を設け、
環状変形体は、基本環状路上に定義された検出点に位置する検出部と、この検出部の両端に接続された連結部と、を有し、
検出部は、検出対象となるトルクの作用により弾性変形を生じる第1の変形部と、検出対象となるトルクの作用により弾性変形を生じる第2の変形部と、第1の変形部および第2の変形部の弾性変形により変位を生じる変位部と、を有し、
第1の変形部の外側端はこれに隣接する連結部に接続され、第1の変形部の内側端は変位部に接続され、第2の変形部の外側端はこれに隣接する連結部に接続され、第2の変形部の内側端は変位部に接続され、
変位電極は、変位部の固定支持体に対向する位置に固定され、
作用接続点および固定接続点は、連結部に配置されており、基本平面への作用接続点の正射影投影像と基本平面への固定接続点の正射影投影像とは、互いに異なる位置に形成されるようにしたものである。
(29) 本発明の第29の態様は、所定の回転軸まわりのトルクを検出するトルクセンサにおいて、
回転軸に直交する基本平面上に、回転軸の周囲を取り囲むように基本環状路を定義したときに、この基本環状路に沿って伸びる環状変形体と、
環状変形体にトルクを作用させる作用支持体と、
環状変形体を固定する固定支持体と、
環状変形体の所定箇所に設けられた作用接続点を、作用支持体に接続する作用接続部材と、
環状変形体の所定箇所に設けられた固定接続点を、固定支持体に接続する固定接続部材と、
環状変形体に生じた弾性変形を検出する検出素子と、
検出素子の検出結果に基づいて、作用支持体および固定支持体の一方に負荷がかかった状態において他方に作用した回転軸まわりのトルクを示す電気信号を出力する検出回路と、
を設け、
環状変形体は、基本環状路上に定義された検出点に位置する検出部と、この検出部の両端に接続された連結部と、を有し、
作用接続点および固定接続点は、連結部に配置されており、基本平面への作用接続点の正射影投影像と基本平面への固定接続点の正射影投影像とは、互いに異なる位置に形成されており、
検出部は、作用接続点と固定接続点との間に力が作用したときに、作用した力に基づいて弾性変形を生じる弾性変形構造部を有し、検出素子は、弾性変形構造部に生じた弾性変形を検出するようにしたものである。
(30) 本発明の第30の態様は、上述した第29の態様に係るトルクセンサにおいて、
検出部が、検出対象となるトルクの作用により弾性変形を生じる第1の変形部と、検出対象となるトルクの作用により弾性変形を生じる第2の変形部と、第1の変形部および第2の変形部の弾性変形により変位を生じる変位部と、を有し、
第1の変形部の外側端はこれに隣接する連結部に接続され、第1の変形部の内側端は変位部に接続され、第2の変形部の外側端はこれに隣接する連結部に接続され、第2の変形部の内側端は変位部に接続されているようにしたものである。
(31) 本発明の第31の態様は、上述した第29または第30の態様に係るトルクセンサにおいて、
検出素子が、検出部の所定位置に固定された変位電極と、作用支持体もしくは固定支持体の変位電極に対向する位置に固定された固定電極と、を有する容量素子によって構成され、
変位電極は、検出部に生じた弾性変形に基づいて固定電極に対して変位を生じる位置に配置されており、
検出回路が、容量素子の静電容量値の変動に基づいて、作用したトルクを示す電気信号を出力するようにしたものである。
(32) 本発明の第32の態様は、上述した第29の態様に係るトルクセンサにおいて、
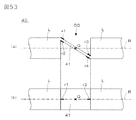
検出部が、検出対象となるトルクの作用により弾性変形を生じる板状変形部を有し、この板状変形部はその板面が基本環状路に対して傾斜するように配置されているようにしたものである。
(33) 本発明の第33の態様は、上述した第32の態様に係るトルクセンサにおいて、
検出素子が、検出部の弾性変形を生じる位置に固定されたストレインゲージによって構成されており、
検出回路が、ストレインゲージの電気抵抗の変動に基づいて、作用したトルクを示す電気信号を出力するようにしたものである。
(34) 本発明の第34の態様は、上述した第33の態様に係るトルクセンサにおいて、
検出素子が、板状変形部の連結部に対する接続端近傍の両面に配置されたストレインゲージによって構成されているようにしたものである。
(35) 本発明の第35の態様は、上述した第34の態様に係るトルクセンサにおいて、
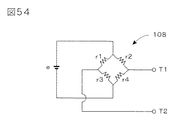
検出素子が、連結部に対する第1の接続端近傍の表側の面および裏側の面にそれぞれ配置された第1のストレインゲージおよび第2のストレインゲージと、連結部に対する第2の接続端近傍の表側の面および裏側の面にそれぞれ配置された第3のストレインゲージおよび第4のストレインゲージと、を有し、
検出回路が、第1のストレインゲージと第4のストレインゲージとを第1の対辺とし、第2のストレインゲージと第3のストレインゲージとを第2の対辺とするブリッジ回路のブリッジ電圧を検出するようにしたものである。
環状変形体、左側支持体、右側支持体は、軸方向の厚みが小さな扁平構造体によって構成することができるので、センサ全体の軸長を短く設定することが可能になる。また、環状変形体の検出部の歪みによってトルク検出が行われるので、検出部としては、弾性変形を生じる材質を用いる必要があるものの、環状変形体としては、比較的高い剛性をもった材質を利用しても、高精度の検出が可能になる。更に、環状変形体の形状の歪みは、変位部に固定された変位電極と、これに対向するように右側支持体に固定された固定電極と、によって構成された容量素子によって検出できるので、構造も単純化され、固定電極の位置調整も容易に行うことができる。このため、小型で高剛性をもち、高い生産効率が実現可能なトルクセンサを提供することが可能になる。
特に、環状変形体の上下の2箇所を左側支持体に接合し、左右の2箇所を右側支持体に接合して、各接続点が90°ずつずれるようにすれば、トルクの作用によって、環状変形体を効率的に変形させることができる。各接続点が45°ずつずれるようにして、4箇所を左側支持体に接合し、4箇所を右側支持体に接合するようにしても同様である。
また、同じトルクが作用した場合に、電極間隔が広がる容量素子と電極間隔が狭まる容量素子とを用いて、両静電容量値の差分として、作用したトルクを検出するようにすれば、同相ノイズやゼロ点ドリフトを抑えた安定したトルク検出が可能になる。温度による各部の膨張の影響を相殺して、精度の高い検出値を得るのにも貢献できる。更に、他軸成分の干渉を排除した正確な検出値を得ることもできる。
本発明に係るトルクセンサでは、環状変形体だけでなく、左側支持体および右側支持体にも、回転軸を挿通する貫通開口部を形成することが可能である。これにより、回転軸に沿って、左側支持体、環状変形体、右側支持体の各貫通開口部を貫く挿通孔を確保することができ、内部が中空となる構造を採ることができる。したがって、本発明に係るトルクセンサを、ロボットアームの関節部分に組み込んで利用する場合、この中空部分に減速機などを配置することができ、総合的に省スペースのロボットアームを設計することが可能になる。
また、環状変形体の連結部の右側の側面と右側支持体の対向面との間に、補助接続部材を設けるようにすれば、検出対象となる所定の回転軸まわりのトルク(回転モーメント)以外の干渉成分の影響を抑制することが可能になるので、他軸成分の干渉に起因する誤差を低減し、より精度の高い検出が可能になる。
なお、左側支持体および右側支持体の代わりに、作用支持体および固定支持体を用いるようにし、固定支持体を、右側支持体と同様に環状変形体の右側に配置し、作用支持体を、環状変形体の外側もしくは内側に配置するようにしても、ほぼ同様の効果が得られる。
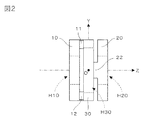
図2は、図1に示す3つの構成要素を相互に接合することにより得られる先願トルクセンサの基本構造部の側面図である。
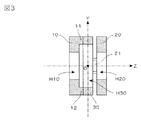
図3は、図2に示す基本構造部をYZ平面で切断した側断面図である。
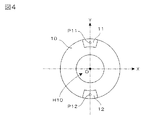
図4は、図1に示す左側支持体10および凸状部11,12を図1の右方向から見た正面図である。
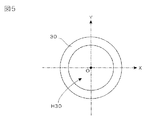
図5は、図1に示す環状変形体30を図1の右方向から見た正面図である。
図6は、図1に示す右側支持体20および凸状部21,22を図1の右方向から見た正面図である。
図7は、図2に示す基本構造部をXY平面で切断し、図2の左方向から見た断面図である。
図8は、図2に示す基本構造部にZ軸正まわりのトルクが作用したときの変形状態を示すXY平面での断面図である(図2に示す基本構造部をXY平面で切断し、図2の左方向から見た断面図である。破線は変形前の状態を示す)。
図9は、内周面に変位電極E31,E32を形成した状態の環状変形体30を、図2の左方向から見た平面図である。
図10は、固定電極E21,E22を取り付けた状態の右側支持体20を、図2の左方向から見た平面図である。
図11は、図10に示す右側支持体20の側面図である。
図12は、図3に示す基本構造部に変位電極および固定電極を付加した構造体をVZ平面で切断した側断面図である(図12の上方は、図9および図10に示すV軸方向)。
図13は、図2に示す基本構造部に上述した変位電極および固定電極を付加した構造体をXY平面で切断し、図2の左方向から見た断面図である。
図14は、図13に示す基本構造部に対して、Z軸正まわりのトルクが作用したときの状態を示す断面図である(破線は変形前の状態を示す)。
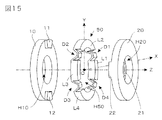
図15は、本発明の基本的実施形態に係るトルクセンサの基本構造部の分解斜視図である。
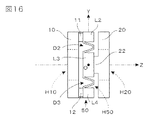
図16は、図15に示す3つの構成要素を相互に接合することにより得られる本発明の基本的実施形態に係るトルクセンサの基本構造部の側面図である。
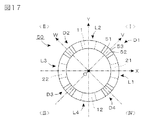
図17は、図15に示す環状変形体50を図15の右方向から見た正面図である。
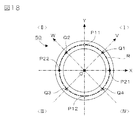
図18は、図15に示す環状変形体50の各検出点および各接続点の配置を示すXY平面上への投影図(右側支持体20側から見た図:環状変形体50は輪郭のみを示す)である。
図19は、図15に示す環状変形体50の検出部D1〜D4(代表して符号Dで示す)の詳細構造を示す部分断面図である。
図20は、図15に示す環状変形体50の検出部D1〜D4(代表して符号Dで示す)およびこれに対向する右側支持体20の所定部分に電極を設けた詳細構造を示す部分断面図である。
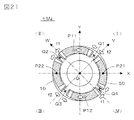
図21は、図15に示す基本構造部における左側支持体10に、Z軸正まわりのトルク+Mzが作用したときの変形状態を示すXY平面での断面図である(図15に示す基本構造部をXY平面で切断し、図15の右方向から見た断面図である。破線は変形前の状態を示す)。
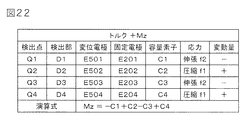
図22は、図21に示す変形が生じたときの各検出部の挙動を示す表である。
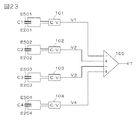
図23は、図15に示す基本的実施形態に係るトルクセンサに用いる検出回路の一例を示す回路図である。
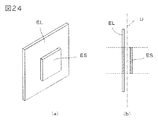
図24は、固定電極に対する変位電極の相対位置が変化した場合にも、容量素子の実効面積を一定に維持する原理を示す図である。
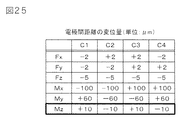
図25は、図16に示す基本構造部における左側支持体10に、各軸方向の力もしくは各軸まわりのモーメントが作用したときの各容量素子の電極間距離の具体的な変位量の実例を示す表である。
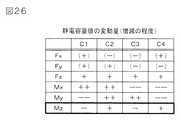
図26は、図25に示す表に基づいて作成した各容量素子の静電容量値の変動量(増減の程度)を示す表である。
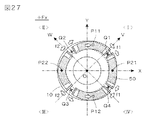
図27は、図15に示す基本構造部における左側支持体10に、X軸正方向の力+Fxが作用したときの変形状態を示すXY平面での断面図である(図15に示す基本構造部をXY平面で切断し、図15の右方向から見た断面図である。破線は変形前の状態を示す)。
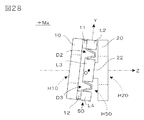
図28は、図15に示す基本構造部における左側支持体10に、X軸正まわりのモーメント+Mxが作用したときの変形状態を示す側面図である。
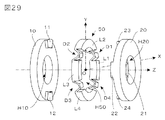
図29は、補助接続部材を付加した本発明の変形例に係るトルクセンサの基本構造部の分解斜視図である。
図30は、図29に示す3つの構成要素を相互に接合することにより得られるトルクセンサの基本構造部の側面図である。
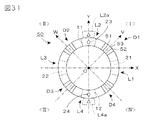
図31は、図29に示す環状変形体50に補助接続部材23,24を接合した状態を、図29の右方向から見た正面図である。
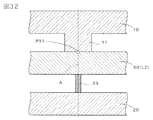
図32は、図29に示す基本構造部における補助接続部材23の近傍構造を示す部分断面図である。
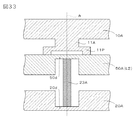
図33は、図32に示す補助接続部材の近傍構造の変形例を示す部分断面図である。
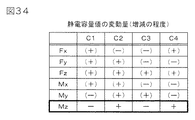
図34は、図29に示す補助接続部材を付加した変形例における左側支持体10に、各軸方向の力もしくは各軸まわりのモーメントが作用したときの各容量素子の静電容量値の変動量(増減の程度)を示す表である。
図35は、8組の検出部を用いる本発明の変形例に係るトルクセンサの環状変形体60の正面図(右側支持体20側から見た図)である。
図36は、図35に示す環状変形体60の検出部および連結部の配置を示す平面図である(ハッチングは、検出部の領域を示すものであり、断面を示すものではない)。
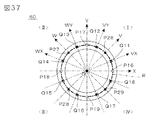
図37は、図35に示す環状変形体60の各検出点および各接続点の配置を示すXY平面上への投影図(右側支持体20側から見た図:環状変形体60は輪郭のみを示す)である。
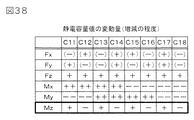
図38は、図35に示す8組の検出部を用いる変形例における左側支持体10に、各軸方向の力もしくは各軸まわりのモーメントが作用したときの各容量素子の静電容量値の変動量(増減の程度)を示す表である。
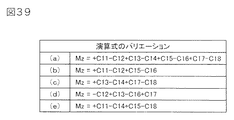
図39は、図35に示す8組の検出部を用いる変形例において、Z軸まわりのモーメントMz(検出対象となるトルク)を算出するための式のバリエーションを示す図である。
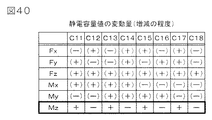
図40は、図35に示す8組の検出部を用いる変形例に、更に、補助接続部材を付加したトルクセンサにおける左側支持体10に、各軸方向の力もしくは各軸まわりのモーメントが作用したときの各容量素子の静電容量値の変動量(増減の程度)を示す表である。
図41は、本発明における検出部の構造のバリエーションを示す部分断面図である。
図42は、本発明に利用可能な正方形状の環状変形体60Sの正面図(右側支持体20側から見た図)である。
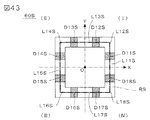
図43は、図42に示す正方形状の環状変形体60Sの検出部および連結部の配置を示す平面図である(ハッチングは、検出部の領域を示すものであり、断面を示すものではない)。
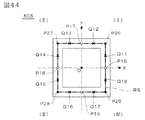
図44は、図43に示す正方形状の環状変形体60Sの各検出点および各接続点の配置を示すXY平面上への投影図(右側支持体20側から見た図:環状変形体60Sは輪郭のみを示す)である。
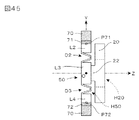
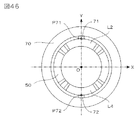
図45は、環状変形体50を作用支持体70によって外側から支持する変形例の基本構造部の側面図(作用支持体70の部分は断面を示す)である。
図46は、図45に示す環状変形体50および作用支持体70を図45の右方向から見た正面図である。
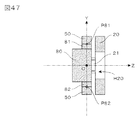
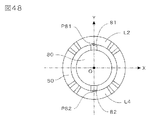
図47は、環状変形体50を作用支持体80によって内側から支持する変形例の基本構造部をYZ平面で切断した側断面図である。
図48は、図47に示す環状変形体50および作用支持体80を図47の右方向から見た正面図である。
図49は、図35に示す環状変形体60を作用支持体70によって外側から支持した状態を右方向からみた正面図である。
図50は、図35に示す環状変形体60を作用支持体80によって内側から支持した状態を右方向からみた正面図である。
図51は、変位部93が外側を向くように配置された検出部D1’〜D4’を有する環状変形体90およびその外側に配置された作用支持体70を示す平面図(上段の図)およびこれらに固定支持体120を付加することにより構成される基本構造部をXZ平面で切断した側断面図(下段の図)である。
図52は、より単純な構造をもった検出部DDを構成する板状変形部41の弾性変形の態様を示す部分断面図である。
図53は、図52(a)示す検出部DDに生じた弾性変形を検出する検出素子としてストレインゲージを用いた例を示す側面図(図(a))および平面図(図(b))である。
図54は、図53に示す4組のストレインゲージの検出結果に基づいて電気信号を出力するブリッジ回路を示す回路図である。
<<< §1. 先願トルクセンサの基本構造部の特徴 >>>
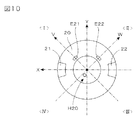
図1は、先願トルクセンサの基本構造部の分解斜視図である。図示のように、この基本構造部は、左側支持体10と右側支持体20との間に、環状変形体30を配置し、これら3つの構成要素を相互に接合することによって構成される。ここでは、便宜上、図示のとおりXYZ三次元座標系を定義して、以下の説明を行うことにする。ここで、図の水平方向に描かれたZ軸が、検出対象となるトルクの回転軸に相当し、このトルクセンサは、この回転軸まわり(Z軸まわり)のトルクを検出する機能を果たすことになる。
図の中央に配置された環状変形体30は、検出対象となるトルクの作用により弾性変形を生じる材質からなり、その内部には、回転軸(Z軸)が挿通する貫通開口部H30が形成されている。一方、図の左側に配置された左側支持体10は、環状変形体30の左側面を支持する部材であり、図の右側に配置された右側支持体20は、環状変形体30の右側面を支持する部材である。図示する先願トルクセンサの場合、左側支持体10は、回転軸(Z軸)が挿通する貫通開口部H10が形成された環状部材であり、右側支持体20は、回転軸(Z軸)が挿通する貫通開口部H20が形成された環状部材である。
なお、一般に右側および左側という概念は、特定の観察方向から見た場合にのみ意味をもつ概念であるが、ここでは説明の便宜上、図1に示すとおり、回転軸(Z軸)が左右に伸びる水平線をなすような基準観察方向(右方向がZ軸の正方向となるような観察方向)から見たときに、環状変形体30の左側に隣接する位置に配置された支持体を左側支持体10と呼び、環状変形体30の右側に隣接する位置に配置された支持体を右側支持体20と呼ぶことにする。
ここでは、環状変形体30の中心位置にXYZ三次元座標系の原点Oを定義しており、左側支持体10,環状変形体30,右側支持体20は、いずれもZ軸を中心軸とする円環状の部材によって構成されている。より具体的には、環状変形体30は、Z軸(回転軸)を中心軸として配置された円盤の中央部に、より径の小さな同心円盤の形状をした貫通開口部H30を形成することにより得られる円環状の部材からなる。同様に、左側支持体10および右側支持体20も、Z軸(回転軸)を中心軸として配置された円盤の中央部に、より径の小さな同心円盤の形状をした貫通開口部H10,H20を形成することにより得られる円環状の部材からなる。
一方、左側支持体10の右側面には、右方に突出した2つの扇形の凸状部11,12が設けられており、この凸状部11,12の頂面が環状変形体30の左側面に接合されている。図示のとおり、凸状部11は環状変形体30の上部(Y軸正方向に位置する部分)に接合され、凸状部12は環状変形体30の下部(Y軸負方向に位置する部分)に接合される。同様に、右側支持体20の左側面には、左方に突出した2つの扇形の凸状部21,22が設けられており、この凸状部21,22の頂面が環状変形体30の右側面に接合されている。図示のとおり、凸状部21は環状変形体30の奥の部分(X軸正方向に位置する部分)に接合され、凸状部22は環状変形体30の手前の部分(X軸負方向に位置する部分)に接合される。
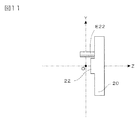
図2は、図1に示す3つの構成要素を相互に接合することにより得られるトルクセンサの基本構造部の側面図であり、図3は、この基本構造部をYZ平面で切断した側断面図である。ここに示す例の場合、図3に示すとおり、凸状部11,12は、左側支持体10と一体となった構造体であり、その頂面が環状変形体30の左側面に接合されている。同様に、凸状部21,22は、右側支持体20と一体となった構造体であり、その頂面が環状変形体30の右側面に接合されている。
結局、凸状部11,12は、環状変形体30の左側支持体10に対向する左側の側面上の左側接続点を、左側支持体10に接続する左側接続部材として機能し、凸状部21,22は、環状変形体30の右側支持体20に対向する右側の側面上の右側接続点を、右側支持体20に接続する右側接続部材として機能する。
図4は、左側支持体10および凸状部11,12を図1の右方向から見た正面図、図5は、環状変形体30を図1の右方向から見た正面図、図6は、右側支持体20および凸状部21,22を図1の右方向から見た正面図である。図4において、凸状部11,12の中心位置に白ドットで示されている点P11,P12は左側接続点であり、§2において、環状変形体30に対する接続位置を説明するために用いられる。同様に、図6において、凸状部21,22の中心位置に黒ドットで示されている点P21,P22は右側接続点であり、やはり§2において、環状変形体30に対する接続位置を説明するために用いられる。
なお、図4に示す部品(左側支持体10および凸状部11,12)と図6に示す部品(右側支持体20および凸状部21,22)とは、実際には、全く同一のものにするのが好ましい。この場合、図4に示す部品をY軸を回転軸として180°回転させて裏返し、更に、Z軸を回転軸として90°回転させれば、図6に示す部品に完全に一致する。したがって、実際には、図4に示す部品を2組用意し、図5に示す部品を1組用意すれば、図2に示す基本構造部を構成することができる。
図5に示すとおり、環状変形体30には、円形の貫通開口部H30が設けられているが、これは、検出に必要な弾性変形を生じさせるためのものである。後述するように、この基本構造部に検出対象となるトルクが作用した場合、環状変形体30は楕円形に変形する必要がある。このような環状変形体30の弾性変形のしやすさは、センサの検出感度を左右するパラメータになる。弾性変形しやすい環状変形体30を用いれば、微小なトルクでも検出可能な感度の高いセンサを実現することができるが、検出可能なトルクの最大値は抑制されることになる。逆に、弾性変形しにくい環状変形体30を用いれば、検出可能なトルクの最大値を大きくとることができるが、感度は低下するため、微小なトルクの検出はできなくなる。
環状変形体30の弾性変形のしやすさは、Z軸方向の厚み(薄くするほど弾性変形しやすい)および貫通開口部H30の径(大きくするほど弾性変形しやすい)に依存して決まり、更に、その材質にも依存して決まる。したがって、実用上は、トルクセンサの用途に応じて、環状変形体30の各部の寸法や材質を適宜選択すればよい。
一方、左側支持体10および右側支持体20は、トルクを検出する原理上、弾性変形を生じる部材である必要はない。むしろ、作用したトルクが環状変形体30の変形に100%寄与するようにするためには、左側支持体10および右側支持体20は、完全な剛体である方が好ましい。図示の例において、左側支持体10および右側支持体20として、中心部に貫通開口部H10,H20を有する環状の構造体を用いた理由は、弾性変形しやすくするためではなく、回転軸(Z軸)に沿って、左側支持体10、環状変形体30、右側支持体20の各貫通開口部H10,H30,H20を貫く挿通孔が確保されるようにするためである。
図3の側断面図を見れば明らかなように、この基本構造部は、内部が中空となる構造を採っている。このような中空部分を有するトルクセンサを、ロボットアームの関節部分に組み込んで利用する場合、この中空部分に減速機などを配置することができ、総合的に省スペースのロボットアームを設計することが可能になる。これは、中実丸棒形状をしたトーションバーのねじれを利用する従来型のトルクセンサでは実現困難であった利点のひとつである。
このように、先願トルクセンサでは、環状変形体30は、トルク検出に必要な程度の弾性変形を生じる材質で構成する必要があるが、左側支持体10および右側支持体20は、弾性変形を生じる必要はなく、むしろ剛性の高い材質を用いて構成するのが好ましい。実用上、左側支持体10,右側支持体20,環状変形体30の材料としては、絶縁材料を利用するのであれば、プラスチックなどの合成樹脂を用いれば十分であり、導電材料を利用するのであれば(この場合、後述するように、電極が短絡しないよう必要箇所に絶縁を施す必要がある)、ステンレス、アルミニウムなどの金属を用いれば十分である。もちろん、絶縁材料と導電材料とを組み合わせて利用してもかまわない。
左側支持体10、右側支持体20、環状変形体30は、いずれも軸方向の厚みが小さな扁平構造体によって構成することができるので、センサ全体の軸長を短く設定することが可能になる。また、環状変形体30の形状の歪みによってトルク検出が行われるので、環状変形体30としては、弾性変形を生じる材質を用いる必要があるものの、比較的高い剛性をもった材質を利用しても、高精度の検出が可能になる。
<<< §2. 先願トルクセンサにおけるトルクの検出原理 >>>
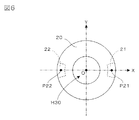
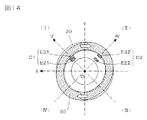
続いて、ここでは、§1で述べた先願トルクセンサの基本構造部にトルクが作用した場合、各部がどのように変形するかを考えてみる。図7は、図2に示す基本構造部をXY平面で切断し、図2の左方向から見た断面図である。なお、この図7に示されたXY座標系は、通常のXY座標系を裏側から見たものになる(X軸正方向は図の左方向になる)。したがって、このXY座標系では、左上領域が第1象限、右上領域が第2象限、右下領域が第3象限、左下領域が第4象限になる。図示のI〜IVは、この座標系の各象限を示すものである。図にハッチングを施した断面部分は、環状変形体30の部分に相当し、その奥に、右側支持体20が見えている。図の点P11〜P22は、図4および図6に示した各接続点P11〜P22のXY平面上への正射影投影像である。
すなわち、図7において、Y軸上に配置された白ドットで示されている点P11,P12は、左側支持体10の凸状部11,12の接合位置(接合面の中心点)を示しており、X軸上に配置された黒ドットで示されている点P21,P22は、右側支持体20の凸状部21,22の接合位置(接合面の中心点)を示している。結局、環状変形体30の左側面は、Y軸に沿った2箇所の接続点P11,P12において左側支持体10に接合され、環状変形体30の右側面は、X軸に沿った2箇所の接続点P21,P22において右側支持体20に接合されていることになる。
図示の例の場合、各接続点P11,P12,P21,P22は、図に一点鎖線で示す基本環状路R(XY平面上において環状変形体30の内周円と外周円との中間に位置する円)上に位置している。このように、環状変形体30の上下の2箇所を左側支持体10に接合し、左右の2箇所を右側支持体20に接合して、各接続点が90°ずつずれるようにすれば、トルクの作用によって、環状変形体30を効率的に変形させることができる。
図7に示す例の場合、環状変形体30の両側面をXY平面上に投影して正射影投影像を得た場合に、第1の右側接続点P21の投影像が正のX軸上、第2の右側接続点P22の投影像が負のX軸上、第1の左側接続点P11の投影像が正のY軸上、第2の左側接続点P12の投影像が負のY軸上に配置されていることになる。このような配置を行うと、環状変形体30を軸対称性をもった楕円に変形させることができるので、軸対称性をもった検出値を得ることができる。
先願トルクセンサ(本発明に係るトルクセンサも同様)は、図2に示す基本構造部において、左側支持体10と右側支持体20との間に相対的に加わるトルク(回転モーメント)を検出するものであり、検出値は、両支持体10,20間に相対的に作用する力を示すものである。そこで、ここでは説明の便宜上、右側支持体20に負荷がかかった状態において、左側支持体10に加わった回転モーメントを検出対象となるトルクとして考えることにする(もちろん、左側支持体10に負荷がかかった状態において、右側支持体20に加わった回転モーメントを検出対象となるトルクとしても等価である。)。
たとえば、ロボットアームの関節部分にこのトルクセンサを利用した一例として、左側支持体10にモータなどの駆動源を取り付け、右側支持体20にロボットハンドを取り付けた例を考えてみよう。ロボットハンドに重量のある物体が把持されている状態で、駆動源から左側支持体10に対して回転駆動力を加えたとすると、この回転駆動力が関節部分を構成する基本構造部を介して、ロボットハンド側へと伝達されることになる。この場合、右側支持体20を回転駆動させようとするトルクが作用することになり、当該トルクは、右側支持体20を固定した状態において、左側支持体10に加わった回転モーメントに相当する。
さて、このような回転モーメントが、図7に示す構造体にどのような変化をもたらすかを考えてみる。右側支持体20を固定すると、図7に示すX軸上の接続点P21,P22(黒ドット)の位置は固定状態となる。一方、左側支持体10に対して、たとえば、図7において時計まわりの方向に回転モーメントが加わったとすると、Y軸上の接続点P11,P12(白ドット)は時計まわりに移動しようとする。そうなると、必然的に、第1象限Iに位置する円弧P21−P11の部分は内側方向に縮み、第2象限IIに位置する円弧P11−P22の部分は外側に膨らみ、第3象限IIIに位置する円弧P22−P12の部分は内側方向に縮み、第4象限IVに位置する円弧P12−P21の部分は外側に膨らむことになる。
図8は、図7に示す構造体に、このような変形が生じた状態を示す断面図である。すなわち、図2に示す基本構造部にZ軸正まわりのトルクが作用した場合に、この基本構造部をXY平面で切断し、図2の左方向から見た断面図である。なお、本願では、任意の座標軸に関して、右ねじを当該座標軸の正方向に進めるための回転方向を正方向と定義し、右ねじを当該座標軸の負方向に進めるための回転方向を負方向と定義している。したがって、図8において、Z軸正まわりのトルクは、図に白抜き矢印で示すとおり時計まわりの方向に作用するトルクということになる。
図8に描かれた破線は、環状変形体30の変形前の状態(図7の状態)を示している。この破線を参考にすれば、Z軸正まわりのトルクが作用したことにより、環状変形体30は楕円形に変形していることが容易に把握できよう。ここでは、説明の便宜上、XY平面上に、原点Oを通りX軸およびY軸に対して45°をなすV軸およびW軸を定義する。V軸は第1象限Iを正方向とする座標軸であり、W軸は第2象限IIを正方向とする座標軸である。図示のとおり、環状変形体30は、V軸を短軸方向、W軸を長軸方向とする楕円に変形しており、V軸およびW軸に対して軸対称性を有している。このような軸対称性は、§3で述べる方法でトルクの検出値を得る場合に好都合である。
図示の実施形態において、軸対称性をもった変形が生じるのは、図7に示すとおり、無負荷時(トルクが作用していない時)に環状変形体30が完全な円形をしており、環状変形体30の両側面をXY平面上に投影して正射影投影像を得た場合に、第1の右側接続点P21の投影像が正のX軸上、第2の右側接続点P22の投影像が負のX軸上、第1の左側接続点P11の投影像が正のY軸上、第2の左側接続点P12の投影像が負のY軸上に配置されているためである。
作用したトルクが大きければ大きいほど、環状変形体30はより扁平した楕円に変形することになる。したがって、図8において、環状変形体30のV軸上に位置する部分の原点Oからの距離や、環状変形体30のW軸上に位置する部分の原点Oからの距離を測定することができれば(これらの距離は、破線で示す変形前の位置からの変位量を示す情報になる)、作用したトルクの大きさを求めることができる。別言すれば、環状変形体30の内周面もしくは外周面の径方向の変位を測定することができればよい。
一方、逆向きにトルクが作用した場合、すなわち、Z軸負まわりのトルクが作用した場合は、図8に示す例とは逆に、環状変形体30(の接続点P11,P12)に対して反時計まわりの回転力が作用するため、環状変形体30は、V軸を長軸方向、W軸を短軸方向とする楕円に変形する。したがって、環状変形体30のV軸上に位置する部分あるいはW軸上に位置する部分の変位方向は、図8に示す例とは逆の方向になる。
結局、先願トルクセンサの場合、環状変形体30のV軸上に位置する部分あるいはW軸上に位置する部分の変位を測定すれば、作用したトルクの方向および大きさの双方を検出することが可能になる。たとえば、環状変形体30の内周面とV軸との交点の位置をモニタした場合、破線で示す基準位置から内側方向に変位した場合はZ軸正まわりのトルクが加わっており、外側方向に変位した場合はZ軸負まわりのトルクが加わっていると判断できる。あるいは、環状変形体30の内周面とW軸との交点の位置をモニタした場合、破線で示す基準位置から外側方向に変位した場合はZ軸正まわりのトルクが加わっており、内側方向に変位した場合はZ軸負まわりのトルクが加わっていると判断できる。もちろん、変位量の絶対値は、作用したトルクの大きさを示すものになる。
この先願トルクセンサにおいて生じる環状変形体30の径方向の変位は、環状変形体30に生じたねじれ角度が小さくても、環状変形体の径次第で比較的大きな変位になる。このため、比較的剛性が高い環状変形体30を用いたとしても、十分な感度をもったトルク検出が可能になる。
以上が、先願トルクセンサにおけるトルクの検出原理である。先願トルクセンサでは、このような原理に基づくトルク検出を行うために、これまで述べてきた基本構造部に、更に、容量素子と検出回路とを付加することになる。
<<< §3. 先願トルクセンサにおける容量素子を用いた検出方法 >>>
先願トルクセンサでは、図2に示す基本構造部に、更に、容量素子と検出回路を付加し、トルクセンサを構成することになる。図8に示すように、トルクの作用により、環状変形体30は楕円に変形する。このような変形により、最も大きな変位を生じる部分は、V軸上に位置する部分あるいはW軸上に位置する部分であるから、環状変形体30の特定部分の変位に基づいて、環状変形体30の変形量(作用したトルクの大きさ)を測定するには、V軸上に位置する部分あるいはW軸上に位置する部分の変位を測定するのが最も効率的である。
そこで、先願トルクセンサでは、環状変形体30の内周面のV軸上に位置する部分およびW軸上に位置する部分に変位電極を形成している。図9は、内周面に変位電極E31,E32を形成した状態の環状変形体30を、図2の左方向から見た平面図である。説明の便宜上、X,Y,V,W軸が重ねて描かれている。変位電極E31は、V軸の正の領域と環状変形体30の内周面との交差位置に形成された電極であり、変位電極E32は、W軸の正の領域と環状変形体30の内周面との交差位置に形成された電極である。これら変位電極E31,E32の奥行き寸法(図9の紙面に垂直方向の寸法)は、環状変形体30の奥行き寸法に等しい。この例の場合、変位電極E31,E32は、環状変形体30の内周面に、蒸着やメッキ等の方法で形成された金属膜などの導電層によって構成されている。もちろん、環状変形体30がアルミニウムやステンレスのような金属でできている場合は、環状変形体30自体が導電性をもつため、絶縁層を介して変位電極E31,E32を形成する必要がある。
一方、これら変位電極E31,E32に対向する位置には、それぞれ固定電極E21,E22が設けられ、右側支持体20に固定される。図10は、これら固定電極E21,E22を取り付けた状態の右側支持体20を、図2の左方向から見た平面図である。ここでも、説明の便宜上、X,Y,V,W軸が重ねて描かれている。固定電極E21は、V軸の正の領域に配置され、変位電極E31に対向する。固定電極E22は、W軸の正の領域に配置され、変位電極E32に対向する。
図11は、図10に示す右側支持体20の側面図である。図示のとおり、固定電極E22は、右側支持体20の左側面から回転軸に沿った方向(Z軸負方向)に突き出した導電板によって構成されている。なお、固定電極E21は、固定電極E22の奥に隠れているため、図11には現れていない。
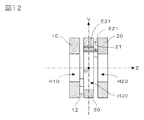
図12は、図3に示す基本構造部に変位電極および固定電極を付加した構造体をVZ平面で切断した側断面図である。図3がYZ平面で切断した側断面図であるのに対して、図12はVZ平面で切断した側断面図であるため、図12の上方は、Y軸方向ではなく、図9および図10に示すV軸方向となっている。この図12の側断面図には、V軸上に配置された変位電極E31と固定電極E21とが互いに対向している状態が明瞭に示されている。変位電極E31は、環状変形体30の内周面に固着された電極であるため、環状変形体30の変形に依存して変位する。一方、固定電極E21は、右端が右側支持体20に固定されており、環状変形体30の変形にかかわらず、常に一定の位置を保つことになる。
結局、変位電極E31の固定電極E21に対する相対位置は、環状変形体30の変形に依存して変化することになる。別言すれば、変位電極E31と固定電極E21との電極間距離は、環状変形体30の変形に依存して変化する。図12には示されていないが、W軸上に配置された変位電極E32と固定電極E22との関係も全く同様である。
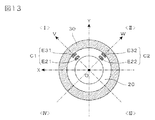
図13は、図2に示す基本構造部に上述した変位電極および固定電極を付加した構造体をXY平面で切断し、図2の左方向から見た断面図である。この断面図では、V軸上に配置された変位電極E31と固定電極E21とが互いに対向し、W軸上に配置された変位電極E32と固定電極E22とが互いに対向した状態が明瞭に示されている。
ここに示す例の場合、変位電極E31,E32は、環状変形体30の内周面に形成された導電層によって構成されているため、その表面は環状変形体30の内周に沿った曲面になる。そこで、これらに対向する固定電極E21,E22も、曲面状の電極にしている。別言すれば、変位電極E31,E32や固定電極E21,E22の表面は、Z軸を中心軸とした同心状の円柱表面によって構成されている。もっとも、各電極の表面形状は容量素子を構成する役割を果たすことができれば、どのような形状であってもよいので、表面が平面となる平板状の電極を用いてもかまわない。
なお、本願図面では、図示の便宜上、各変位電極および各固定電極の厚みの実寸を無視して描いてある。たとえば、変位電極E31,E32を、環状変形体30の内周面に形成された導電層(蒸着層やメッキ層)によって構成した場合、その厚みは、数μm程度に設定することができる。これに対して、固定電極E21,E22を、右側支持体20の左側面から突き出した導電板(金属板)によって構成した場合、実用上の強度を確保するために、その厚みは、数mm程度確保するのが好ましい。したがって、図13等では、便宜上、変位電極の厚みと固定電極の厚みを同じ寸法で描いてあるが、これら電極の厚みの実寸は、製造工程や実用上の強度を考慮して、それぞれ適当な値に設定されるべきものである。
図14は、図13に示す基本構造部に対して、Z軸正まわりのトルクが作用したときの状態を示すXY断面図である。§2で述べたとおり、このようなトルクが作用すると、環状変形体30は楕円状に変形し、V軸は当該楕円の短軸方向、W軸は当該楕円の長軸方向になる。その結果、V軸上に配置された一対の電極E21,E31の電極間隔は狭まり、W軸上に配置された一対の電極E22,E32の電極間隔は広がることになる。そこで、一対の電極E21,E31により容量素子C1を構成し、一対の電極E22,E32により容量素子C2を構成しておけば、これら容量素子C1,C2の静電容量値の変動量として、作用したトルクの方向および大きさを検出することが可能になる。
たとえば、図13に示す無負荷状態(トルクが作用していない状態)を基準として、電極E21,E31からなる容量素子C1の静電容量値の変動に着目すると、図14に示すようにZ軸正まわりのトルクが作用すると、電極間隔が狭まるため、静電容量値は増加することになり、逆に、Z軸負まわりのトルクが作用すると、電極間隔が広がるため、静電容量値は減少することになる。したがって、静電容量値の増加変動はZ軸正まわりのトルクが作用していることを示し、静電容量値の減少変動はZ軸負まわりのトルクが作用していることを示すことになる。もちろん、変動量の絶対値は、作用したトルクの大きさを示すことになる。
同様に、電極E22,E32からなる容量素子C2の静電容量値の変動に着目すると、図14に示すようにZ軸正まわりのトルクが作用すると、電極間隔が広がるため、静電容量値は減少することになり、逆に、Z軸負まわりのトルクが作用すると、電極間隔が狭まるため、静電容量値は増加することになる。したがって、静電容量値の減少変動はZ軸正まわりのトルクが作用していることを示し、静電容量値の増加変動はZ軸負まわりのトルクが作用していることを示すことになる。もちろん、変動量の絶対値は、作用したトルクの大きさを示すことになる。
結局、容量素子C1を用いても、容量素子C2を用いても、Z軸まわりのトルク検出が可能であり、理論的には、いずれか一方の容量素子のみを用いれば足りる。ただ、実用上は、容量素子C1,C2の双方を用いた検出を行うのが好ましい。すなわち、環状変形部30が楕円に変形した際の短軸位置(V軸上)と長軸位置(W軸上)とにそれぞれ容量素子C1,C2を設けておけば、同一のトルクが加わった場合、短軸位置(V軸上)では電極間隔が狭まり静電容量値が増加するのに対して、長軸位置(W軸上)では電極間隔が広がり静電容量値が減少するので、両静電容量値C1,C2の差分として、作用したトルクを検出することができる。このような差分検出は、同相ノイズやゼロ点ドリフトを抑えた安定したトルク検出に有効であり、また、温度による各部の膨張の影響を相殺して、精度の高い検出値を得るのに貢献する。
このような差分検出を行うためには、要するに、環状変形体30の各部分のうち、所定回転方向のトルクが作用したときに、回転軸に近づく方向に変位する第1の部分(この例ではV軸との交差部分)に固定された第1の変位電極E31と、回転軸から離れる方向に変位する第2の部分(この例ではW軸との交差部分)に固定された第2の変位電極E32と、第1の変位電極E31に対向する位置に配置された第1の固定電極E21と、第2の変位電極E32に対向する位置に配置された第2の固定電極E22と、を設けておけばよい。
そして、このような差分検出を行うための検出回路として、第1の変位電極E31と第1の固定電極E21とによって構成される第1の容量素子C1の静電容量値と、第2の変位電極E32と第2の固定電極E22とによって構成される第2の容量素子C2の静電容量値と、の差に相当する電気信号を、作用したトルクを示す電気信号として出力する回路を設けておけばよい。
このように、先願トルクセンサは、図1に示すような単純な基本構造部に、変位電極および固定電極を付加することにより構成することができるため、小型で高剛性をもったセンサを実現することができる。しかしながら、商業的量産を行う上では、固定電極の取り付けおよびその位置調整に多大な作業負担が必要になり、生産効率が低下し、コストが高騰するという問題がある。
たとえば、図10に示す例の場合、固定電極E21,E22は、右側支持体20に取り付けられるが、環状変形体30の内周面に取り付けられた変位電極E31,E32に対応する位置に配置する必要がある。すなわち、実際には、図11に示すように、固定電極E22は、右側支持体20の左側面から垂直左方へと突き出すように取り付け、対向する両電極が平行になるように調整する必要がある(図示の例の場合、右側支持体20の左側面に対して正確に90°をなすように取り付ける必要がある。)。したがって、固定電極E22の根端部を右側支持体20に正確に固定するためには、それなりに手間のかかる工程が必要になる。
また、図12の側断面図を見れば明らかなように、変位電極E31と固定電極E21との間の電極間隔は、固定電極E21の根端部の固定状態によって変動し、当該変動は検出値(容量素子の静電容量値)に影響を及ぼすことになる。このため、商業的量産品を製造する上では、個々の製品ごとに、固定電極E21に対して正確な位置調整を行う必要があり、多大な作業負担が課されることになる。また、上述した差分検出を行うには、複数の容量素子を対称性をもたせて配置し、個々の容量素子についての電極間隔が互いに等しくなるような調整が必要になるので、作業負担は更に増大する。
本発明は、先願トルクセンサにおけるこのような問題を解決するため、より生産効率を高めることができる新たな工夫を提案するものである。以下、本発明を具体的な実施形態に基づいて詳述する。
<<< §4. 本発明の基本的実施形態に係るトルクセンサの基本構造部 >>>
<4−1.基本構造部の全体構成>
図15は、本発明の基本的実施形態に係るトルクセンサの基本構造部の分解斜視図である。図示のように、この基本構造部は、左側支持体10と右側支持体20との間に、環状変形体50を配置し、これら3つの構成要素を相互に接合することによって構成される。ここでも、便宜上、図示のとおりXYZ三次元座標系を定義して、以下の説明を行う。図の水平方向に描かれたZ軸が、検出対象となるトルクの回転軸に相当し、このトルクセンサは、この回転軸まわり(Z軸まわり)のトルクを検出する機能を果たす。
図1に示す先願トルクセンサの基本構造部と、図15に示す本発明に係るトルクセンサの基本構造部との相違は、前者の環状変形体30が、後者では環状変形体50に置き換えられている点である。図1に示す環状変形体30は、Z軸(回転軸)を中心軸として配置された円盤の中央部に、より径の小さな同心円盤の形状をした貫通開口部H30を形成することにより得られる円環状の部材である。これに対して、図15に示す環状変形体50は、この円環状の環状変形体30に対して、部分的な材料除去加工を施すことにより得られた部材であり、内部に形成された貫通開口部H50には、回転軸(Z軸)が挿通している。したがって、この環状変形体50は、基本的には、内部に同心円盤状の貫通開口部H50が形成された円環状の部材であるが、材料除去加工を施した部分によって、図示のような検出部D1〜D4が形成されていることになる。
なお、ここでは、環状変形体50の形状を説明するために「材料除去加工」という文言を用いているが、環状変形体50を実際に作成する際には、必ずしも円環状の部材に対して切削加工などを施す必要はない。たとえば、環状変形体50を金属で構成する場合であれば、鋳型を用いた鋳造によって製造することもでき、プラスチックなどの樹脂で構成する場合であれば、所定の型を用いた射出成形加工やプレス加工によって環状変形体50を製造することができる。
ここでは、環状変形体50のうち、検出部D1〜D4以外の部分を連結部L1〜L4と呼ぶことにする。図示のとおり、環状変形体50は、4組の検出部D1〜D4と4組の連結部L1〜L4とを交互に配置した構造を有する。4組の連結部L1〜L4は、円環状の部材の円弧状部分によって構成され、4組の検出部D1〜D4は、後述するように、トルクの作用による弾性変形が生じる構造を有している。図示の例の場合、環状変形体50の検出部D1〜D4の部分は、肉厚の薄い板状片によって構成されており、この板状片が板ばねとして機能して検出対象となるトルクの作用により弾性変形を生じる。
なお、この図15に示す左側支持体10および右側支持体20は、図1に示す左側支持体10および右側支持体20と全く同一の構成要素であり、Z軸(回転軸)を中心軸として配置された円盤の中央部に、より径の小さな同心円盤の形状をした貫通開口部H10,H20を形成することにより得られる円環状の部材である。結局、この図15に示す基本構造部の場合も、左側支持体10および右側支持体20は、中心部に貫通開口部H10,H20を有する環状の構造体であり、Z軸(回転軸)に沿って、左側支持体10、環状変形体50、右側支持体20の各貫通開口部H10,H50,H20を貫く挿通孔が確保されている。なお、各支持体10,20について貫通開口部H10,H20を形成することは、本発明を実施する上での必須条件ではないので、貫通開口部H10,H20は必ずしも設ける必要はない。
図15に示す基本構造部においても、左側支持体10は、環状変形体50の左側面を支持する部材であり、右側支持体20は、環状変形体50の右側面を支持する部材である。ここでも、環状変形体50の中心位置にXYZ三次元座標系の原点Oを定義しており、左側支持体10,環状変形体50,右側支持体20は、いずれもZ軸が中心軸となるように配置されている。
また、左側支持体10の右側面には、右方に突出した2つの扇形の凸状部11,12(左側接続部材)が設けられており、この凸状部11,12の頂面が環状変形体50の左側面に接合されている。同様に、右側支持体20の左側面には、左方に突出した2つの扇形の凸状部21,22(右側接続部材)が設けられており、この凸状部21,22の頂面が環状変形体50の右側面に接合されている。
図示のとおり、凸状部11は環状変形体50の上部(Y軸正方向に位置する連結部L2)に接合され、凸状部12は環状変形体50の下部(Y軸負方向に位置する連結部L4)に接合される。同様に、凸状部21は環状変形体50の奥の部分(X軸正方向に位置する連結部L1)に接合され、凸状部22は環状変形体50の手前の部分(X軸負方向に位置する連結部L3)に接合される。後述するように、これら各凸状部の接続位置は、環状変形体50の各接続点Q1〜Q4の位置に相当する。
図16は、図15に示す3つの構成要素を相互に接合することにより得られるトルクセンサの基本構造部の側面図である(図が繁雑になるのを避けるため、検出部に関しては、手前に位置する検出部D2,D3の外周面のみを示してある)。ここに示す例の場合、図15に示すとおり、凸状部11,12は、左側支持体10と一体となった構造体であり、その頂面が環状変形体50の連結部L2,L4の左側面に接合されている。同様に、凸状部21,22は、右側支持体20と一体となった構造体であり、その頂面が環状変形体50の連結部L1,L3の右側面に接合されている。
結局、凸状部11,12は、環状変形体50の左側支持体10に対向する左側の側面上の左側接続点を、左側支持体10に接続する左側接続部材として機能し、凸状部21,22は、環状変形体50の右側支持体20に対向する右側の側面上の右側接続点を、右側支持体20に接続する右側接続部材として機能する。
図17は、図15に示す環状変形体50を図15の右方向から見た正面図である。この図においても、説明の便宜上、XY平面上に、原点Oを通りX軸およびY軸に対して45°をなすV軸およびW軸を定義している。V軸はXY平面上において、原点Oを中心としてX軸を反時計まわりに45°回転させた座標軸であり、W軸はXY平面上において、原点Oを中心としてY軸を反時計まわりに45°回転させた座標軸である。図示のとおり、第1の検出部D1は正のV軸上(第1象限I)、第2の検出部D2は正のW軸上(第2象限II)、第3の検出部D3は負のV軸上(第3象限III)、第4の検出部D4は負のW軸上(第4象限IV)にそれぞれ配置されている。
ここで、各検出部D1〜D4は、いずれも第1の変形部51,第2の変形部52,変位部53なる3つの部品によって構成されている。図では、検出部D1の構成部品についてのみ符号を記してあるが、検出部D2〜D4についても同様である。これら4組の検出部D1〜D4の三次元形状は、図15の分解斜視図に示すとおりである。4組の連結部L1〜L4は、これら4組の検出部D1〜D4を連結する機能を有し、各検出部D1〜D4の間にそれぞれ各連結部L1〜L4が介挿されている。
図17には、凸状部11,12(左側接続部材)の接合位置および凸状部21,22(右側接続部材)の接合位置が破線で示されている。
図18は、図15に示す環状変形体50の各検出点Q1〜Q4および各接続点P11〜P22の配置を示すXY平面上への投影図である(右側支持体20側から見た図)。環状変形体50は、その内側および外側の輪郭円の投影像のみを示す。また、図に一点鎖線で描かれた太い円は、XY平面上に定義された基本環状路Rである。この基本環状路Rは、図示の実施例の場合、環状変形体50の内側輪郭円と外側輪郭円との中間位置を通るXY平面上の円であり、環状変形体50の環状肉厚部分の中心線になる。
図示のとおり、4組の検出点Q1〜Q4は、この基本環状路R上の点として定義される。具体的には、第1の検出点Q1は、正のV軸と基本環状路Rとの交点位置に定義され、第2の検出点Q2は、正のW軸と基本環状路Rとの交点位置に定義され、第3の検出点Q3は、負のV軸と基本環状路Rとの交点位置に定義され、第4の検出点Q4は、負のW軸と基本環状路Rとの交点位置に定義されている。これら検出点Q1〜Q4は、それぞれ検出部D1〜D4の配置を示すものである。すなわち、図17および図18を対比すれば、第1の検出部D1は第1の検出点Q1の位置に配置され、第2の検出部D2は第2の検出点Q2の位置に配置され、第3の検出部D3は第3の検出点Q3の位置に配置され、第4の検出部D4は第4の検出点Q4の位置に配置されていることがわかる。
一方、図18に白ドットで示されている点P11,P12は左側接続点の投影像であり、図18に黒ドットで示されている点P21,P22は右側接続点の投影像である。前述したとおり、左側接続点P11,P12は、実際には、環状変形体50の左側面上の点であり、凸状部11,12(左側接続部材)の接続位置を示しており、右側接続点P21,P22は、実際には、環状変形体50の右側面上の点であり、凸状部21,22(右側接続部材)の接続位置を示している。図示の例の場合、これら各接続点P11〜P22の投影像も基本環状路R上に位置している。すなわち、左側接続点P11,P12の投影像は、Y軸と基本環状路Rとの交点位置に定義され、右側接続点P21,P22の投影像は、X軸と基本環状路Rとの交点位置に定義されている。
結局、図18に示す例の場合、左側接続部材11,12の接続位置を示す左側接続点P11,P12(白ドット)と、右側接続部材21,22の接続位置を示す右側接続点P21,P22(黒ドット)とは、基本環状路Rに沿って交互に配置されていることになる。このような交互配置は、後述するように、検出対象となるトルクが作用したときに、環状変形体50に効果的な変形を生じさせる上で重要である。また、4組の検出点Q1〜Q4は、各接続点P11〜P22の間に配置されている。このような配置も、検出対象となるトルクが作用したときに、各検出部D1〜D4に効果的な変位を生じさせる上で重要である。
<4−2.検出部の構造と機能>
続いて、各検出部D1〜D4の構造と機能について説明する。図19は、図15に示す環状変形体50の検出部D1〜D4の詳細構造を示す部分断面図である。4組の検出部D1〜D4は、いずれも同一の構造を有している。図19に示す検出部Dは、これら4組の検出部D1〜D4を代表するものであり、環状変形体50を、基本環状路Rを含む円柱面で切断したときの断面部分を示している。図19(a)は、トルクが作用していない状態、図19(b)は、トルクの作用により検出部Dに圧縮力f1が作用した状態、図19(c)は、トルクの作用により検出部Dに伸張力f2が作用した状態をそれぞれ示している。
図19(a)に示すとおり、検出部Dの左右両脇には、連結部Lが位置している。この連結部Lは、4組の連結部L1〜L4のいずれかに相当する。たとえば、図19(a)に示す検出部Dが、図15に示されている第2の検出部D2の場合、右脇に配置されている連結部Lは、図15に示す連結部L2に相当し、左脇に配置されている連結部Lは、図15に示す連結部L3に相当する。
図示のとおり、検出部Dは、検出対象となるトルクの作用により弾性変形を生じる第1の変形部51と、検出対象となるトルクの作用により弾性変形を生じる第2の変形部52と、第1の変形部51および第2の変形部52の弾性変形により変位を生じる変位部53と、を有しており、左脇に配置された連結部Lの端部と右脇に配置された連結部Lの端部との間に配置されている。
ここに示す例の場合、第1の変形部51は、可撓性を有する第1の板状片によって構成され、第2の変形部52は、可撓性を有する第2の板状片によって構成され、変位部53は、第3の板状片によって構成されている。実際には、環状変形体50は、金属(ステンレス、アルミニウムなど)や合成樹脂(プラスチックなど)といった同一材料からなる構造体によって構成される。第1の板状片51、第2の板状片52、変位部53は、連結部Lに比べて肉厚の薄い板状の部材であるため可撓性を有することになる。
なお、ここに示す例の場合、変位部53も肉厚の薄い板状の部材であるため可撓性を有しているが、変位部53は必ずしも可撓性をもった部材である必要はない(もちろん、可撓性があってもよい)。変位部53の役割は、トルクが作用したときに、対向する右側支持体20に対して変位を生じることであり、そのような変位を生じさせるには、第1の変形部51および第2の変形部52が可撓性を有していれば足りる。したがって、変位部53は、必ずしも肉厚の薄い板状の部材によって構成する必要はなく、より肉厚の厚い部材であってもかまわない。一方、連結部Lは、ある程度の可撓性を有していてもかまわないが、作用したトルクによって、第1の変形部51および第2の変形部52に効果的な変形を生じさせる上では、連結部Lはなるべく変形しない方が好ましい。
第1の変形部51の外側端はこれに隣接する連結部Lに接続され、第1の変形部51の内側端は変位部53に接続されている。また、第2の変形部52の外側端はこれに隣接する連結部Lに接続され、第2の変形部52の内側端は変位部53に接続されている。図19(a)に示す例の場合、第1の変形部、第2の変形部、変位部は、それぞれ第1の板状片51、第2の板状片52、第3の板状片53によって構成されており、第1の板状片51の外側端(左端)は、左脇に配置された連結部Lの右端部に接続され、第1の板状片51の内側端(右端)は、第3の板状片53の左端に接続され、第2の板状片52の外側端(右端)は、右脇に配置された連結部Lの左端部に接続され、第2の板状片52の内側端は、第3の板状片53の右端に接続されている。
前述したとおり、検出部Dは、基本環状路R上に定義された検出点Qの位置に配置される。図19(a)に示す法線Nは、検出点Qの位置に立てた、基本環状路Rを含む基本平面(XY平面)に直交する法線であり、検出部Dは、この法線Nが中心にくるように配置されている。また、図19(a)の断面図において、第1の板状片51および第2の板状片52は、法線Nに対して傾斜しており、かつ、第1の板状片51の傾斜方向(右下がり)と第2の板状片52の傾斜方向(右上がり)とが逆向きとなっている。特に、図示の例の場合、検出部Dの断面形状は法線Nに関して線対称となっており、第3の板状片53の上下両面は、XY平面に平行な面を構成している。
このように、基本環状路Rを含む断面に関して、法線Nに対する第1の板状片51の傾斜方向と第2の板状片52の傾斜方向とが逆向きとなっているため、基本環状路Rに沿った方向に圧縮力f1が作用した場合と、伸張力f2が作用した場合とでは、第3の板状片53(変位部)の変位方向が逆になる。これは、後述するように、複数の容量素子を用いた差分検出を行う上で好都合である。
すなわち、図19(b)に示すとおり、検出部Dに対して基本環状路Rに沿った方向に圧縮力f1(図の白矢印)が作用した場合は、検出部Dには、横幅を縮める方向に応力が加わることになるので、第1の板状片51および第2の板状片52の姿勢は、より垂直に立った状態に変化する。その結果、第3の板状片53(変位部)は、図に黒矢印で示すとおり下方に変位する。一方、図19(c)に示すとおり、検出部Dに対して基本環状路Rに沿った方向に伸張力f2(図の白矢印)が作用した場合は、検出部Dには、横幅を広げる方向に応力が加わることになるので、第1の板状片51および第2の板状片52の姿勢は、より水平に寝た状態に変化する。その結果、第3の板状片53(変位部)は、図に黒矢印で示すとおり上方に変位する。
本発明の基本原理は、このような変位を利用して、作用したトルクの向きおよび大きさを検出することにある。すなわち、作用したトルクの向きは、変位部53の変位方向(図19における上方か下方か)によって検出することができ、作用したトルクの大きさは、その変位量によって検出することができる。
<4−3.容量素子の構成>
本発明では、変位部53の変位を検出するために容量素子を利用する。図20は、図15に示す環状変形体50の検出部D1〜D4およびこれに対向する右側支持体20の所定部分に電極を設けた詳細構造を示す部分断面図であり、図15に示す環状変形体50および右側支持体20の一部を示すものである。この図20においても、検出部Dは、4組の検出部D1〜D4を代表するものであり、環状変形体50を、基本環状路Rを含む円柱面で切断したときの断面部分を示している。すなわち、図20の左側に示されている環状変形体50の一部分は、図19(a)に示す環状変形体50の一部分に対応する。
前述したとおり、トルクが作用していない状態において、第3の板状片53の両面は、基本環状路Rを含むXY平面に平行な面を構成している。したがって、図示のとおり、第3の板状片53(変位部)と右側支持体20の対向面とは平行な状態になっている。しかも、ここに示す実施例の場合、検出部Dの断面形状は法線Nに関して線対称となっているため、第3の板状片53(変位部)は、図19(b),図19(c)に示すとおり、法線Nに沿って平行移動する形で変位を生じる。結局、第3の板状片53(変位部)と右側支持体20の対向面とは常に平行な状態に維持される。
変位部の変位を検出するために、第3の板状片53(変位部)の右側支持体20に対向する位置には、絶縁層I50を介して変位電極E50が固定される。また、右側支持体20の変位電極E50に対向する位置には、絶縁層I20を介して固定電極E20が固定される。そうすれば、変位電極E50と固定電極E20とによって構成される容量素子Cの静電容量値に基づいて、第3の板状片53(変位部)の変位方向および変位量を検出することができる。
具体的には、図19(b)に示すように、検出部Dに圧縮力f1が作用すると、両電極間距離が縮み、容量素子Cの静電容量値は増加し、図19(c)に示すように、検出部Dに伸張力f2が作用すると、両電極間距離が広がり、容量素子Cの静電容量値は減少する。図20には、検出部Dについて容量素子Cを形成した例が示されているが、もちろん、実際には、図15に示す4組の検出部D1〜D4について、それぞれ変位電極E50と固定電極E20とが設けられ、4組の容量素子C1〜C4が形成されることになる。これら4組の容量素子C1〜C4を用いた具体的なトルク検出の原理は、次の§5において詳述する。
なお、図20に示す実施例では、変位電極E50を絶縁層I50を介して第3の板状片53(変位部)に固定しているが、これは、環状変形体50を金属などの導電性材料によって構成したためである。同様に、固定電極E20を絶縁層I20を介して右側支持体20に固定しているが、これは、右側支持体20を金属などの導電性材料によって構成したためである。すなわち、ここに示す実施例の場合、左側支持体10、右側支持体20、環状変形体50を、金属などの導電性材料により構成しているため、変位電極E50を、変位部53の表面に絶縁層I50を介して形成し、固定電極E20を、右側支持体20の表面に絶縁層I20を介して形成している。
したがって、環状変形体50(そのうち、少なくとも変位電極E50の形成面)を樹脂などの絶縁材料によって構成した場合は、絶縁層I50を設ける必要はない。同様に、右側支持体20(そのうち、少なくとも固定電極E20の形成面)を樹脂などの絶縁材料によって構成した場合は、絶縁層I20を設ける必要はない。
また、環状変形体50を金属などの導電性材料により構成した場合は、環状変形体50の右側面の表面の一部の領域を変位電極E50として利用することもできる。たとえば、図20に示す実施例において、環状変形体50を導電性材料により構成すれば、第3の板状片53(変位部)は導電性の板になるため、それ自身が変位電極E50としての機能を果たすことになる。このため、別途、変位電極E50を設ける必要はなくなる。この場合、電気的には、環状変形体50の表面全体が同電位になるが、実際に4組の容量素子C1〜C4の変位電極E50としての機能を果たす部分は、個別に設けられた4組の固定電極E20に対向する領域のみということになる。したがって、4組の容量素子C1〜C4はそれぞれ別個の容量素子として振る舞うことになり、原理的な支障は生じない。
逆に、右側支持体20を金属などの導電性材料により構成した場合は、右側支持体20の左側面の表面の一部の領域を固定電極E20として利用することもできる。たとえば、図20に示す実施例において、右側支持体20を導電性材料により構成すれば、その左側面の表面の一部が固定電極E20としての機能を果たすことになる。このため、別途、固定電極E20を設ける必要はなくなる。この場合、電気的には、右側支持体20の表面全体が同電位になるが、実際に4組の容量素子C1〜C4の固定電極E20としての機能を果たす部分は、個別に設けられた4組の変位電極E50に対向する領域のみということになる。したがって、4組の容量素子C1〜C4はそれぞれ別個の容量素子として振る舞うことになり、原理的な支障は生じない。
このように、環状変形体50を金属などの導電性材料により構成したり、あるいは、右側支持体20を金属などの導電性材料により構成したりすれば、個別の変位電極E50や個別の固定電極E20を設ける工程を省略することができるので、生産効率を更に向上させることができる。
もっとも、このような省略構造を採ると、環状変形体50全体あるいは右側支持体20全体が共通の電極になり、意図していない様々な部分に浮遊容量が形成されることになる。このため、静電容量の検出値にノイズ成分が混入しやすくなり、検出精度が低下する可能性がある。したがって、高精度の検出が要求されるトルクセンサの場合には、環状変形体50や右側支持体20を導電性材料によって構成した場合であっても、図20に示す実施例のように、それぞれ絶縁層を介して、個別の変位電極E50および個別の固定電極E20を設けるようにするのが好ましい。
なお、検出部Dの弾性変形のしやすさは、センサの検出感度を左右するパラメータになる。弾性変形しやすい検出部Dを用いれば、微小なトルクでも検出可能な感度の高いセンサを実現することができるが、検出可能なトルクの最大値は抑制されることになる。逆に、弾性変形しにくい検出部Dを用いれば、検出可能なトルクの最大値を大きくとることができるが、感度は低下するため、微小なトルクの検出はできなくなる。
検出部Dの弾性変形のしやすさは、第1の変形部51(第1の板状片)および第2の変形部52(第2の板状片)の厚み(薄くするほど弾性変形しやすい)、幅(狭くするほど弾性変形しやすい)、長さ(長くするほど弾性変形しやすい)などの形状に依存して決まり、更に、その材質にも依存して決まる。また、変位部53(第3の板状片)を弾性変形させる構造で検出部Dを設計することもできる。したがって、実用上は、トルクセンサの用途に応じて、検出部Dの各部の寸法や材質を適宜選択すればよい。
なお、前述したとおり、本願図面では、図示の便宜上、各部の実寸を無視して描いてある。たとえば、図20では、変位電極E50,固定電極E20の厚みや、絶縁層I50,絶縁層I20の厚みが、各板状片51,52,53の厚みとほぼ同じになるように描かれているが、これら各電極や絶縁層は、蒸着やメッキによって構成することができ、その厚みは、数μm程度に設定することができる。これに対して、各板状片51,52,53の厚みは、実用的な強度を考慮してより厚く設計するのが好ましく、たとえば、金属により構成する場合であれば、1mm程度に設定するのが好ましい。
一方、左側支持体10および右側支持体20は、トルクを検出する原理上、弾性変形を生じる部材である必要はない。むしろ、作用したトルクが環状変形体50の変形に100%寄与するようにするためには、左側支持体10および右側支持体20は、完全な剛体である方が好ましい。図示の例において、左側支持体10および右側支持体20として、中心部に貫通開口部H10,H20を有する環状の構造体を用いた理由は、弾性変形しやすくするためではなく、回転軸(Z軸)に沿って、左側支持体10、環状変形体50、右側支持体20の各貫通開口部H10,H50,H20を貫く挿通孔が確保されるようにするためである。§1〜§3で述べた先願トルクセンサと同様に、内部が中空となる構造を採用すれば、この中空部分に様々な部品を配置することができ、実用的な利用勝手が向上する。
図15に示すとおり、左側支持体10、右側支持体20、環状変形体50は、いずれもZ軸方向の厚みが小さな扁平構造体によって構成することができるので、センサ全体の軸長を短く設定することが可能になる。しかも、容量素子Cを構成するための電極構造を単純化することができるため、生産効率を向上させる効果が期待できる。この効果は、図12に例示されている先願トルクセンサの容量素子と、図20に例示されている本発明に係るトルクセンサの容量素子とを比較すると、容易に理解できよう。
すなわち、図12に例示されている先願トルクセンサでは、環状変形体30の内周面に形成された変位電極E31と、右側支持体20の左側面に固定された固定電極E21とによって容量素子が形成される。このため、固定電極E21の根端部を右側支持体20に正確に固定するためには、それなりに手間のかかる工程が必要になり、しかも、その位置調整に多大な作業負担が必要になり、生産効率の低下は免れない。実際、固定電極E21の先端部の位置がわずかにずれただけで、変位電極E31と固定電極E21との距離が変動し、容量素子の静電容量値に変動が生じることになる。このような問題は、固定電極E21を、右側支持体20の左側面から垂直左方に突き出すように配置したことに起因している。
一方、図20に例示されている本発明に係るトルクセンサでは、いずれの電極も、その形成面に沿って配置されているため、上記問題は生じない。すなわち、変位電極E50は、変位部53の表面に沿って形成された層状の電極であり、固定電極E20は、右側支持体20の左側面に沿って形成された層状の電極である。いずれも、形成面に沿って配置された層状の電極であるため、一般的な成膜工程を利用して形成することができ、形成工程の作業負担は比較的軽くなる。
また、環状変形体50と右側支持体20との間隔は、図15に示す凸状部21,22(右側接続部材)の厚みによって規定されるため、変位電極E50と固定電極E20との間の間隔(容量素子Cの電極間隔)は、絶縁層I50,変位電極E50,固定電極E20,絶縁層I20の厚みを正確に制御することにより、正確に調整することができる。一般的な成膜工程を利用すれば、正確な厚み制御が可能であり、商業的量産を行う場合であっても、個々の容量素子ごとに対向電極が平行になるようにするとともに、複数の容量素子についての電極間隔が互いに等しくなるような調整を行うことは容易である。このような理由により、本発明によれば、小型で高剛性をもち、高い生産効率が実現可能なトルクセンサを提供することが可能になる。
<<< §5. 基本的実施形態に係るトルクセンサによるトルク検出原理 >>>
続いて、§4で述べたトルクセンサによるトルクの検出原理を説明する。
<5−1.容量素子を用いたトルク検出>
図21は、図15に示す基本構造部における右側支持体20に負荷がかかっている状態において、左側支持体10に、Z軸正まわりのトルク+Mzが作用したときの変形状態を示すXY平面での断面図である。別言すれば、図15に示す基本構造部をXY平面で切断し、図15の右方向から見た断面図である。ここでも、説明の便宜上、X軸およびY軸を反時計まわりに45°回転させた座標軸として、V軸およびW軸を定義している。
図にハッチングを施した断面部分は、環状変形体50に相当し、その奥に、左側支持体10が見えている。図の点P11〜P22は、各接続点P11〜P22のXY平面上への正射影投影像である。左側支持体10にZ軸正まわりのトルク+Mzが作用すると、図に白ドットで示されている点P11,P12(左側接続点)には、白矢印で示すような反時計まわりの応力が作用する。一方、右側支持体20には負荷がかかっているので、図に黒ドットで示されている点P21,P22(右側接続点)は、そのまま定位置に留まろうとする。
その結果、第1の検出点Q1および第3の検出点Q3の位置近傍には、図に白矢印で示すような伸張力f2が作用し、第2の検出点Q2および第4の検出点Q4の位置近傍には、図に白矢印で示すような圧縮力f1が作用する。結局、環状変形体50は、図示のとおり、W軸を長軸、V軸を短軸とする楕円形に変形する(図の破線は変形前の状態を示している)。
前述したとおり、各検出点Q1〜Q4の位置には、それぞれ検出部D1〜D4が配置されており、容量素子C1〜C4が形成されている。そして、図19(b)に示すように、圧縮力f1が作用した検出部Dの変位部53は右側支持体20に近づくように変位し、容量素子Cの静電容量値は増加し、図19(c)に示すように、伸張力f2が作用した検出部Dの変位部53は右側支持体20から遠ざかるように変位し、容量素子Cの静電容量値は減少する。したがって、Z軸正まわりのトルク+Mzが作用したとき、各検出部D1〜D4は、図22の表に示すような挙動を示すことになる。
すなわち、検出部D1〜D4に配置された変位電極をそれぞれE501〜E504とし、これに対向する固定電極をそれぞれE201〜E204とすれば、Z軸正まわりのトルク+Mzの作用により、検出点Q1,Q3には、伸張力f2が作用し、変位電極E501,E503は、固定電極E201,E203から遠ざかるように変位し、容量素子C1,C3の静電容量値は減少(表では「−」で示す)する。一方、検出点Q2,Q4には、圧縮力f1が作用し、変位電極E502,E504は、固定電極E202,E204に近づくように変位し、容量素子C2,C4の静電容量値は増加(表では「+」で示す)する。
したがって、各容量素子C1〜C4の静電容量値を、同じ符号C1〜C4を用いて表すことにすれば、表の最下行に示すように、演算式「Mz=−C1+C2−C3+C4」に基づく演算を行うことにより、作用したZ軸正まわりのトルク+Mzを検出することができる。この場合、得られる演算値Mzは正の値になり、その絶対値は作用したトルクの大きさを示すことになる。
一方、逆回りのトルク、すなわち、Z軸負まわりのトルク−Mzが作用したときの各検出部D1〜D4の挙動は、図22の表とは逆になり、検出点Q1,Q3には、圧縮力f1が作用し、検出点Q2,Q4には、伸張力f2が作用する。したがって、容量素子C1,C3の静電容量値は増加し、容量素子C2,C4の静電容量値は減少する。その結果、演算式「Mz=−C1+C2−C3+C4」に基づいて得られる演算値Mzは負の値になり、その絶対値は作用したトルクの大きさを示すことになる。結局、この演算式で得られる演算値Mzの符号は、作用したトルクの向きを示し、絶対値はその大きさを示すものになる。
なお、ここでは説明の便宜上、右側支持体20に負荷がかかった状態において、左側支持体10に加わった回転モーメントを検出対象となるトルクとして考えたが、もちろん、左側支持体10に負荷がかかった状態において、右側支持体20に加わった回転モーメントを検出対象となるトルクとしても、検出原理は全く同じである。
したがって、この基本的実施形態の場合、図23の回路図に示されているような検出回路を用いれば、Z軸まわりのトルクを検出することができる。この回路図に示すE501〜E504は、各検出部D1〜D4に設けられた変位電極であり、E201〜E204は、これら変位電極E501〜E504に対向する固定電極であり、C1〜C4は、これらの電極によって構成される容量素子である。また、C/V変換回路101〜104は、それぞれ容量素子C1〜C4の静電容量値C1〜C4を、電圧値V1〜V4に変換する回路であり、変換後の電圧値V1〜V4は、それぞれ各静電容量値C1〜C4に対応した値になる。差分演算器105は、上述した演算式「Mz=−C1+C2−C3+C4」なる演算を行い、その結果を出力端子Tに出力する機能を有する。
なお、図21に示すとおり、Z軸まわりのトルクが作用すると、各検出点Q1〜Q4の位置は、環状変形体50の変形に応じて、環状変形体50の円周に沿った方向に若干の変位を生じることになる。具体的には、図示の例の場合、各検出点Q1〜Q4の位置は、V軸もしくはW軸から反時計まわりの方向に若干ずれた位置に移動している。したがって、トルクが作用すると、図20に示す検出点Qも図の上下に移動することになり、変位部53(変位電極E50)は、図の左右方向に変位を生じるだけでなく、図の上下方向にも変位を生じる。
ただ、図20に示す実施例の場合、変位電極E50のサイズ(平面的なサイズ、すなわち、占有面積)に比べて、固定電極E20のサイズ(平面的なサイズ、すなわち、占有面積)の方が大きく設定されているため、変位電極E50が図の上下方向や図の紙面に垂直な方向に変位したとしても、固定電極E20に対する変位電極E50の対向面積に変化は生じない。したがって、容量素子Cの実効面積は、常に一定に維持されることになる。
図24は、このように、固定電極E20に対する変位電極E50の相対位置が変化した場合にも、容量素子Cの実効面積が一定に維持される原理を示す図である。いま、図24(a)に示すように、一対の電極EL,ESを互いに対向するように配置した場合を考える。両電極EL,ESは、互いに所定間隔をおいて平行になるように配置されており、容量素子を構成している。ただ、電極ELは電極ESに比べて面積が大きくなっており、電極ESの輪郭を電極ELの表面に投影して正射影投影像を形成した場合、電極ESの投影像は、電極ELの表面内に完全に含まれる。この場合、容量素子としての実効面積は、電極ESの面積になる。
図24(b)は、図24(a)に示す一対の電極ES,ELの側面図である。図にハッチングを施した領域は、実質的な容量素子としての機能を果たす部分であり、容量素子としての実効面積は、このハッチングを施した電極の面積(すなわち、電極ESの面積)ということになる。
いま、図に一点鎖線で示すような鉛直面Uを考える。電極ES,ELは、いずれも鉛直面Uに平行になるように配置されている。ここで、電極ESを鉛直面Uに沿って垂直上方に移動させたとすると、電極EL側の対向部分は上方に移動するものの、当該対向部分の面積に変わりはない。電極ESを下方に移動させても、紙面の奥方向や手前方向に移動させても、やはり電極EL側の対向部分の面積は変わらない。
要するに、面積が小さい方の電極ESの輪郭を、面積が大きい方の電極ELの表面に投影して正射影投影像を形成した場合、電極ESの投影像が、電極ELの表面内に完全に含まれる状態を維持している限り、両電極によって構成される容量素子の実効面積は、電極ESの面積に等しくなり、常に一定になる。
したがって、図20に示す変位電極E50と固定電極E20との関係が、図24に示す電極ESと電極ELとの関係と同様の関係になっていれば、トルクの作用によって、変位電極E50がどの方向に変位したとしても、変位電極E50と固定電極E20との間に平行が保たれている限り、容量素子を構成する一対の電極の実効対向面積は一定になる。これは、容量素子Cの静電容量値の変化が、専ら、変位電極E50と固定電極E20との距離に応じて生じることを意味する。別言すれば、容量素子Cの静電容量値の変化は、変位部53の法線Nに沿った方向への変位にのみ依存して生じることになり、法線Nに直交する方向への変位には依存しないことを意味する。これは、上述した原理に基づいて、作用したトルクを正確に検出する上で重要である。
結局、本発明を実施する上では、所定回転方向のトルクが作用した結果、固定電極E20に対する変位電極E50の相対位置が変化した場合にも、容量素子Cを構成する一対の電極の実効対向面積が変化しないように、固定電極E20および変位電極E50のうちの一方の面積を他方の面積よりも大きく設定しておくのが好ましい。
なお、図24には、2枚の電極EL,ESとして、矩形状の電極を用いた例を示したが、本発明に係るトルクセンサに用いる変位電極E50および固定電極E20の形状は任意であり、たとえば、円形の電極を用いるようにしてもかまわない。また、§4−3で述べたとおり、環状変形体50を金属などの導電性材料により構成し、その表面の一部の領域を変位電極E50として利用したり、右側支持体20を金属などの導電性材料により構成し、その表面の一部の領域を固定電極E20として利用するようにしてもかまわない。
<5−2.他軸成分の干渉による誤差の排除>
上述した§5−1では、本発明の基本的実施形態に係るトルクセンサに、Z軸まわりのモーメントMzが作用したという前提で、各検出部D1〜D4の挙動を説明し、図22の最下行に示す演算式「Mz=−C1+C2−C3+C4」に基づく演算を行うことにより、作用したZ軸まわりのモーメントMzを検出対象となるトルクとして検出できることを示した。
ただ、このトルクセンサに作用する外力は、必ずしもZ軸まわりのモーメントMzのみに限定されるものではない。たとえば、図16に示すトルクセンサにおいて、右側支持体20を固定した状態において、左側支持体10に作用する外力は、X軸方向の力Fx,Y軸方向の力Fy,Z軸方向の力Fz,X軸まわりのモーメントMx,Y軸まわりのモーメントMy,Z軸まわりのモーメントMzという6軸成分になる。本発明に係るセンサは、これら6軸成分のうち、Z軸まわりのモーメントMzをトルクとして検出することを目的としたセンサであり、その検出原理は、既に§5−1で説明したとおりである。
もちろん、トルクセンサの利用環境によっては、Z軸まわりのモーメントMzのみしか作用しない状態で利用する場合もあろう。たとえば、図16に示すトルクセンサを、Z軸を中心軸とする円筒内に収容して用いるようにし、このトルクセンサの外径が、当該円筒の内径に一致するような場合、左側支持体10の移動自由度は著しく制限される。このような利用環境では、左側支持体10に対して、Z軸まわりのモーメントMzのみしか作用しないと考えても問題はない。しかしながら、この図16に示すトルクセンサを、ロボットアームの関節部分に組み込み、関節の一部として利用する場合、左側支持体10に対しては、上記6軸成分の力がすべて作用することになる。
これまで述べてきた基本的実施形態に係るトルクセンサは、他軸成分(上記6軸成分のうち、Z軸まわりのモーメントMzを除いた5軸成分)の干渉を排除した正確なトルク検出が可能になるという特徴を有している。ここでは、§5−1で述べた検出方法により、他軸成分の干渉を排除できる点を説明する。
図25は、図16に示す基本構造部において、右側支持体20を固定した状態で、左側支持体10に、各軸方向の力Fx,Fy,Fzもしくは各軸まわりのモーメントMx,My,Mzが作用したときの各容量素子C1〜C4の電極間距離の具体的な変位量の実例を示す表であり、図26は、図25に示す表に基づいて作成した各容量素子の静電容量値の変動量(増減の程度)を示す表である。いずれの表においても、Mzの欄が太線枠で囲って示されているが、これは、このトルクセンサによって本来検出されるべき力成分が、モーメントMz(Z軸まわりのトルク)であることを示している。
図25の表のMzの行を見ると、容量素子C1,C3の欄には「+10」、容量素子C2,C4の欄には「−10」と記載されている。これは、右側支持体20を固定した状態で、左側支持体10にZ軸正まわりのモーメント+Mzが作用した場合、容量素子C1,C3の電極間距離は10μm増加し、容量素子C2,C4の電極間距離は10μm減少することを示している(図25の表における「+」は電極間距離の増加を示し、「−」は電極間距離の減少を示す)。このような現象が生じる理由は、図21を参照しながら既に説明したとおりである。
この図25の表の各欄に示されている数値は、特定の寸法で設計され、特定の材質で構成された基本構造部を用いた具体的な試作品について、右側支持体20を固定した状態で、左側支持体10に所定の基準値をもった各軸方向の力および各軸まわりのモーメントを作用させたときに(モーメントの場合は、原点Oから所定の基準距離だけ離れた作用点に前記基準値をもった力を作用させたときに)、各容量素子C1〜C4の電極間距離の変位量(単位:μm)を実測した結果である。したがって、各欄の数値は、当該試作品について得られた固有値であり、個々の数値の絶対値には普遍的な意味はない。しかしながら、その符号は、電極間距離が増加するのか、減少するのかを示しており、測定対象となった試作品の寸法や材質によらず普遍性をもっている。
図25の表のFxの行を見ると、容量素子C1,C4の欄には「−2」、容量素子C2,C3の欄には「+2」と記載されている。これは、右側支持体20を固定した状態で、左側支持体10にX軸正方向の力+Fxが作用した場合、容量素子C1,C4の電極間距離は2μm減少し、容量素子C2,C3の電極間距離は2μm増加することを示している。このような現象が生じる理由は、図27の変形態様を参照すれば、容易に理解できよう。
図27は、X軸正方向の力+Fxが作用したときの変形状態を示すXY平面での断面図であり、図15に示す基本構造部をXY平面で切断し、図15の右方向から見た断面図に相当する。黒ドットで示す右側接続点P21,P22を固定した状態において、白ドットで示す左側接続点P11,P12にX軸正方向の力+Fxが作用すると、図に白矢印で示すとおり、白ドットで示す左側接続点P11,P12が図の右方に移動する。その結果、第1の検出点Q1および第4の検出点Q4の位置近傍には、図に白矢印で示すような圧縮力f1が作用し、第2の検出点Q2および第3の検出点Q3の位置近傍には、図に白矢印で示すような伸張力f2が作用する。
結局、環状変形体50は、図27に示すとおり、いびつな形に変形する(図の破線は変形前の状態を示している)。かくして、容量素子C1,C4の電極間距離は2μm減少し、容量素子C2,C3の電極間距離は2μm増加し、図25の表のFxの行に示す結果が得られる。同様の理由により、Y軸正方向の力+Fyが作用したときには、図25の表のFyの行に示す結果が得られ、容量素子C1,C2の電極間距離は2μm減少し、容量素子C3,C4の電極間距離は2μm増加する。また、Z軸正方向の力+Fzが作用したときには、環状変形体50が全体的にZ軸正方向に変位することになるので、図25の表のFzの行に示す結果が得られる。すなわち、容量素子C1〜C4の電極間距離はいずれも5μm減少する。
一方、X軸正まわりのモーメント+Mxが作用したときの変形状態を、図28の側面図に示す。図において、X軸は、原点Oを通り紙面に直交する軸になり、X軸正まわりのモーメント+Mxは、左側支持体10を図において時計まわりに回転させる力になる。その結果、XZ平面より上方に配置されている第1の検出部D1(図には現れていない)および第2の検出部D2は、右側支持体20に近づき、XZ平面より下方に配置されている第3の検出部D3および第4の検出部D4(図には現れていない)は、右側支持体20から遠ざかるように変位する。
かくして、図25の表のMxの行に示す結果が得られ、容量素子C1,C2の電極間距離は100μm減少し、容量素子C3,C4の電極間距離は100μm増加する。同様の理由により、Y軸正まわりのモーメント+Myが作用したときには、図25の表のMyの行に示す結果が得られ、容量素子C1,C4の電極間距離は60μm増加し、容量素子C2,C3の電極間距離は60μm減少する。なお、モーメント+Mxが作用したときの電極間距離の増減絶対値が100μmであるのに対して、モーメント+Myが作用したときの電極間距離の増減絶対値が60μmになるのは、図15に示されているとおり、凸状部21,22(右側接続部材)がX軸に沿った位置に配置されているため、Y軸まわりの変位に比べてX軸まわりの変位の方が生じ易くなっているためである。
前述したように、図26は、図25に示す表に基づいて作成した各容量素子の静電容量値の変動量(増減の程度)を示す表であり、各欄の「+」は静電容量値の増加を示し、「−」は静電容量値の減少を示す。電極間距離の増減と静電容量値の増減とは逆になるため、図26の表の各欄の符号と、図25の表の対応欄の符号とは、逆転した関係になっている。
また、図26の表では、符号だけでなく、大まかな絶対値を示すため、静電容量値が増加する場合は、「(+)」,「+」,「++」の3通りの符号を用い、静電容量値が減少する場合は、「(−)」,「−」,「−−」の3通りの符号を用いることにする。ここで、「(+)」,「(−)」は、図25の表に示す数値の絶対値が5未満であることを示し、「+」,「−」は、絶対値が5以上50未満であることを示し、「++」,「−−」は、絶対値が50以上であることを示している。図25の表を見ればわかるように、同一行に所属する各欄の数値の絶対値は互いに等しくなっているが、行が異なると、数値の絶対値も異なる(但し、行Fx,Fyについては、数値の絶対値はすべて同じ「2」である)。
さて、§5−1で述べたとおり、ここで述べる基本的実施形態に係るトルクセンサでは、演算式「Mz=−C1+C2−C3+C4」に基づいて得られる演算値Mzが、検出対象となるトルクの値として出力される。そのために、実際には、図23に示すような検出回路が利用され、出力端子Tに検出値が出力されることになる。図26の表のMzの行を参照すれば、演算式「Mz=−C1+C2−C3+C4」に基づいて得られる演算値Mzが、正しいトルク(Z軸まわりのモーメントMz)を示す値になっていることが理解できよう。
たとえば、便宜上、「−」および「+」で示されている変動量の絶対値をaと仮定し、Mzの行に応じて、C1=−a,C2=+a,C3=−a,C4=+aとすれば、上記演算式の演算結果は、Mz=+4aとなる。これは、Z軸正まわりに4aなる絶対値に対応するトルクが作用したことを示している。もちろん、逆まわりのトルクが作用した場合は、Mzの行の符号は逆転するので、上記演算式の演算結果は、Mz=−4aとなる。これは、Z軸負まわりに4aなる絶対値に対応するトルクが作用したことを示している。このように、Z軸まわりのモーメントMzが作用した場合は、上記演算式による演算値として、当該モーメントMzの向き(符号)および大きさ(絶対値)が支障なく検出される。
次に、左側支持体10に、モーメントMz以外の他軸成分の力が作用した場合を考えてみよう。まず、X軸方向の力Fxが作用した場合は、各静電容量値C1〜C4の変動量は、図26のFxの行に示すようになる。ここでも、便宜上、「(+)」および「(−)」で示されている変動量の絶対値をaと仮定し、Fxの行に応じて、C1=+a,C2=−a,C3=−a,C4=+aとすれば、上記演算式の演算結果は、Mz=0になる。これは、上記演算式の演算結果には、力Fxの成分は含まれないことを示している。
同様に、Y軸方向の力Fyが作用した場合は、各静電容量値C1〜C4の変動量は、図26のFyの行に示すようになる。ここでも、便宜上、「(+)」および「(−)」で示されている変動量の絶対値をaと仮定し、Fyの行に応じて、C1=+a,C2=+a,C3=−a,C4=−aとすれば、上記演算式の演算結果は、Mz=0になる。これは、上記演算式の演算結果には、力Fyの成分は含まれないことを示している。
また、Z軸方向の力Fzが作用した場合は、各静電容量値C1〜C4の変動量は、図26のFzの行に示すようになる。ここでも、便宜上、「+」で示されている変動量の絶対値をaと仮定し、Fzの行に応じて、C1=+a,C2=+a,C3=+a,C4=+aとすれば、上記演算式の演算結果は、Mz=0になる。これは、上記演算式の演算結果には、力Fzの成分は含まれないことを示している。
更に、X軸まわりのモーメントMxが作用した場合は、各静電容量値C1〜C4の変動量は、図26のMxの行に示すようになる。ここでも、便宜上、「++」および「−−」で示されている変動量の絶対値をaと仮定し、Mxの行に応じて、C1=+a,C2=+a,C3=−a,C4=−aとすれば、上記演算式の演算結果は、Mz=0になる。これは、上記演算式の演算結果には、モーメントMxの成分は含まれないことを示している。
最後に、Y軸まわりのモーメントMyが作用した場合は、各静電容量値C1〜C4の変動量は、図26のMyの行に示すようになる。ここでも、便宜上、「++」および「−−」で示されている変動量の絶対値をaと仮定し、Myの行に応じて、C1=−a,C2=+a,C3=+a,C4=−aとすれば、上記演算式の演算結果は、Mz=0になる。これは、上記演算式の演算結果には、モーメントMyの成分は含まれないことを示している。
結局、上記演算式「Mz=−C1+C2−C3+C4」によって得られる演算値Mzには、他軸成分Fx,Fy,Fz,Mx,Myは一切含まれず、当該演算値は、Z軸まわりのモーメントMzの成分のみを示す値になる。このように、図16に示すトルクセンサは、ロボットアームなどの関節の一部として利用した場合でも、他軸成分Fx,Fy,Fz,Mx,Myの干渉を排除し、モーメントMzの成分のみを示す正しいトルク検出が可能になる。
<<< §6. 本発明の基本的実施形態の特徴 >>>
§4および§5では、図15に示す基本構造部を用いた本発明の基本的実施形態に係るトルクセンサの構成および動作を説明した。ここでは、当該基本的実施形態に係るトルクセンサの特徴をまとめておく。
本発明に係るトルクセンサは、所定の回転軸まわりのトルクを検出するセンサであり、その基本構造部は、図15に示すとおり、左側支持体10、環状変形体50、右側支持体20を有している。ここで、図15に示すようにXYZ三次元座標系を定義し、Z軸を回転軸、この回転軸に直交するXY平面を基本平面として、この基本平面XY上に、回転軸Zの周囲を取り囲むように基本環状路Rを定義すれば、環状変形体50は、この基本環状路Rに沿って伸びる環状構造を有している(図18参照)。
ここで、この基本構造部を、図15に示すように、回転軸Zが左右に伸びる水平線をなすような基準観察方向から見れば、左側支持体10は、環状変形体50の左側に隣接する位置に配置され、右側支持体20は、環状変形体50の右側に隣接する位置に配置されている。そして、環状変形体50の左側の側面上の図18に白ドットで示す位置に左側接続点P11,P12を定義し、環状変形体50の右側の側面上の図18に黒ドットで示す位置に右側接続点P21,P22を定義すれば、環状変形体50の左側面は、左側接続点P11,P12の位置において、左側接続部材11,12によって左側支持体10に接続されており、環状変形体50の右側面は、右側接続点P21,P22の位置において、右側接続部材21,22によって右側支持体20に接続されている。
§4および§5で述べた基本的実施形態に係るトルクセンサは、このような基本構造部に、更に、容量素子Cと検出回路を付加することにより構成される。ここで、容量素子Cは、図20に示すように、環状変形体50の右側の側面の所定位置に固定された変位電極E50と、右側支持体20の、変位電極E50に対向する位置に固定された固定電極E20と、によって構成される。そして、検出回路は、各容量素子の静電容量値の変動に基づいて、左側支持体10および右側支持体20の一方に負荷がかかった状態において他方に作用した回転軸Zまわりのトルクを示す電気信号を出力する機能を果たす。
図18に示すとおり、環状変形体50上の基本環状路R上には、検出点Q1〜Q4が定義され、これら検出点Q1〜Q4の位置に検出部D1〜D4が配置されることになる。そして、図15に示すとおり、環状変形体50は、検出部D1〜D4と連結部L1〜L4とを交互に配置した構造を有し、各検出部Dの両端には、それぞれ隣接する連結部Lが接続されている。また、図18に示すように、左側接続点P11,P12および右側接続点P21,P22は、連結部Lに配置されており、基本平面XYへの左側接続点P11,P12の正射影投影像(白ドット)と右側接続点P21,P22の正射影投影像(黒ドット)とは、互いに異なる位置に形成される。そのため、トルクの作用によって、各検出部D1〜D4に圧縮力f1もしくは伸張力f2が作用することになる。
個々の検出部Dは、図20に示すとおり、検出対象となるトルクの作用により弾性変形を生じる第1の変形部51および第2の変形部52と、これら両変形部51,52の弾性変形により変位を生じる変位部53と、を有している。そして、第1の変形部51の外側端はこれに隣接する連結部Lに接続され、内側端は変位部53に接続される。同様に、第2の変形部52の外側端はこれに隣接する連結部Lに接続され、内側端は変位部53に接続される。そして、変位電極E50は、変位部53の右側支持体20に対向する位置に固定される。
図18に示すとおり、本発明の基本的実施形態に係るトルクセンサの場合、左側接続点P11,P12は2箇所、右側接続点P21,P22も2箇所に設けられている。別言すれば、環状変形体50は、左側支持体10に対して2箇所で接続され、右側支持体20に対しても2箇所で接続されている。もっとも、本発明の原理上は、環状変形体50と左側支持体10との接続箇所は少なくとも1箇所あれば足り、環状変形体50と右側支持体20との接続箇所も少なくとも1箇所あれば足りる。したがって、左側接続点および右側接続点は、必ずしも2箇所ずつに設ける必要はないが、実用上は、作用したトルクを環状変形体50に安定して伝達させるため、左側接続点および右側接続点を、少なくとも2箇所ずつに設けるようにするのが好ましい。
また、本発明の基本的実施形態に係るトルクセンサの場合、環状変形体50の4箇所に検出点Q1〜Q4を定義し、合計4組の検出部D1〜D4を設けているが、本発明の原理上は、1組の検出部Dのみでもトルク検出は可能である。たとえば、図20に示す検出部Dの場合、検出点Qの近傍部分に、圧縮力f1(検出部Dを図の上下方向に縮める力)が作用すると容量素子Cの静電容量値は増加し、伸張力f2(検出部Dを図の上下方向に伸ばす力)が作用すると容量素子Cの静電容量値は減少し、増加量および減少量は作用した力の大きさに応じたものになる。したがって、原理的には、環状変形体50の一部に1組の検出部Dを設けておけば、容量素子Cの静電容量値の変化に基づいて、作用したトルクの向きおよび大きさを検出することができる。
しかしながら、実用上は、基本環状路R上に複数n個(n≧2)の検出点を定義し、各検出点にそれぞれ検出部Dを配置するのが好ましい。別言すれば、複数n個の検出部Dと複数n個の連結部Lとを、基本環状路Rに沿って交互に配置することにより、環状変形体50を構成するのが好ましい。これは、複数n個の検出部Dを配置しておけば、複数n組の容量素子Cの静電容量値を利用した検出が可能になり、より検出精度を向上させることができるためである。
また、変位部53の変位態様(特定方向のトルクが作用したときに、右側支持体20に近づくか、遠ざかるか)に基づいて、複数n組の検出部を2通りの属性グループに分けるようにすれば、静電容量値の差分に基づく検出が可能になり、検出精度を更に向上させる効果も得られる。
実用上は、nを偶数に設定し、基本環状路R上に偶数n個(n≧2)の検出点を定義し、各検出点にそれぞれ検出部Dを配置するのが好ましい。別言すれば、偶数n個の検出部Dと偶数n個の連結部Lとを、基本環状路Rに沿って交互に配置することにより、環状変形体50を構成するのが好ましい。そうすれば、n組の検出部を2通りの属性グループに分けた場合、同数ずつのメンバーからなるグループに分けることができるので、偏りのない安定した検出が可能になる。
また、nを偶数に設定すれば、偶数n個の連結部Lに対して、基本環状路Rに沿って順に番号を付与したときに、右側接続点を奇数番目の連結部に配置し、左側接続点を偶数番目の連結部に配置することができるので、左側支持体10に作用したトルクを、環状変形体50に効率的に伝達させることができ、環状変形体50の変形を安定させることができる。§4および§5で述べた基本的実施形態に係るトルクセンサは、n=4に設定した例である。
もちろん、n=2に設定し、環状変形体50に2組の検出部Dを設けるようにすれば、上述した検出精度を向上させる効果を得ることができる。すなわち、n=2に設定した場合は、基本環状路Rに沿って、第1の連結部、第1の検出部、第2の連結部、第2の検出部を、この順序で配置することにより環状変形体を構成し、右側接続点を第1の連結部に配置し、左側接続点を第2の連結部に配置すればよい。
ただ、実用上は、nを4以上の偶数に設定するのが好ましく、§4および§5で述べた基本的実施形態は、最も好ましい実施形態の1つである。n=4に設定した場合は、図17に示すとおり、基本環状路Rに沿って、第1の連結部L1、第1の検出部D1、第2の連結部L2、第2の検出部D2、第3の連結部L3、第3の検出部D3、第4の連結部L4、第4の検出部D4を、この順序で配置することにより環状変形体50が構成されることになる。
しかも、図17および図18を参照すればわかるように、第1の右側接続点P21が第1の連結部L1に配置され、第1の左側接続点P11が第2の連結部L2に配置され、第2の右側接続点P22が第3の連結部L3に配置され、第2の左側接続点P12が第4の連結部L4に配置されている。このため、図15に示すとおり、左側接続部材は、第1の左側接続点P11と左側支持体10とを接続する第1の左側接続部材11と、第2の左側接続点P12と左側支持体10とを接続する第2の左側接続部材12とによって構成され、右側接続部材は、第1の右側接続点P21と右側支持体20とを接続する第1の右側接続部材21と、第2の右側接続点P22と右側支持体20とを接続する第2の右側接続部材22とによって構成される。
したがって、右側支持体20を固定した状態において、左側支持体10にZ軸まわりのトルクが作用すると、当該トルクは、第1の左側接続部材11および第2の左側接続部材12によって、第2の連結部L2および第4の連結部L4に確実に伝達されることになる。一方、第1の連結部L1および第3の連結部L3は、第1の右側接続部材21および第2の右側接続部材22によって、右側支持体20に確実に固定された状態になる。かくして、環状変形体50には、作用したトルクに基づく安定した変形が生じることになる。
また、この基本的実施形態に係るトルクセンサでは、各接続点の配置は、中心軸に関して対称性を有している。具体的には、図18に示すとおり、基本平面(XY平面)と回転軸Zとの交点Oを通り、互いに直交する2直線(X軸およびY軸)を引いた場合、第1の左側接続点P11および第2の左側接続点P12の正射影投影像(白ドット)は、第1の直線上(Y軸上)に配置され、第1の右側接続点P21および第2の右側接続点P22の正射影投影像(黒ドット)は、第2の直線上(X軸上)に配置されている。
すなわち、図示のようなXYZ三次元座標系を定義した場合、環状変形体50は、原点Oを中心として、基本平面となるXY平面上に配置されており、左側支持体10はZ軸負領域(紙面より奥の位置)に配置され、右側支持体20はZ軸正領域(紙面より手前の位置)に配置されている。そして、環状変形体50のZ軸負側の側面上に第1の左側接続点P11および第2の左側接続点P12が設けられ、環状変形体50のZ軸正側の側面上に第1の右側接続点P21および第2の右側接続点P22が設けられる。
ここで、環状変形体50の両側面をXY平面上に投影して正射影投影像を得た場合、第1の右側接続点P21の投影像(黒ドット)は正のX軸上、第2の右側接続点P22の投影像(黒ドット)は負のX軸上、第1の左側接続点P11の投影像(白ドット)は正のY軸上、第2の左側接続点P12の投影像(白ドット)は負のY軸上に配置されている。このように、環状変形体50の上下の2箇所を左側支持体10に接合し、左右の2箇所を右側支持体20に接合して、各接続点が90°ずつずれるようにしているため、トルクの作用によって、環状変形体50を効率的に変形させることができ、また、軸対称性をもった楕円に変形させることができる。このような軸対称性は、静電容量値に基づく差分検出を行う場合に好都合である。
一方、図18に示すとおり、XY平面上において、原点Oを中心としてX軸を反時計まわりに45°回転させた座標軸としてV軸を定義し、原点Oを中心としてY軸を反時計まわりに45°回転させた座標軸としてW軸を定義した場合、第1の検出点Q1は正のV軸上、第2の検出点Q2は正のW軸上、第3の検出点Q3は負のV軸上、第4の検出点Q4は負のW軸上に配置されている。そして、4組の検出部D1〜D4は、各検出点Q1〜Q4が中心となるように配置されており、V軸およびW軸に関して対称性を有している。
このような構成を採れば、合計4組の容量素子C1〜C4が、V軸およびW軸の正負両側に配置されることになるので、特定のトルクが作用した場合に、静電容量値が増加する2組の容量素子と、静電容量値が減少する2組の容量素子と、を用いた差分検出が可能になり、検出精度を向上させることができる。基本的実施形態の場合、4組の検出部D1〜D4は、互いに同一サイズ、同一構造を有しており、4組の容量素子C1〜C4も、互いに同一サイズ、同一構造を有している。このため、静電容量値に基づく差分検出を行うのに適している。
一般に、複数n個の検出部Dを備えたトルクセンサにおいて、静電容量値に基づく差分検出を行うには、n個の検出部Dのうち、一部は第1属性の検出部となり、他の一部は第2属性の検出部となるようにすればよい。
ここで、検出部Dの属性は、変位部53の変位態様(特定方向のトルクが作用したときに、右側支持体20に近づくか、遠ざかるか)に基づいて決められる。すなわち、第1属性の検出部を構成する第1属性変位部53は、第1の回転方向のトルク(たとえば、モーメント+Mz)が作用したときに右側支持体20から遠ざかる方向に変位し、第1の回転方向とは逆の第2の回転方向のトルク(たとえば、モーメント−Mz)が作用したときに右側支持体20に近づく方向に変位する。これに対して、第2属性の検出部を構成する第2属性変位部53は、第1の回転方向のトルク(モーメント+Mz)が作用したときに右側支持体20に近づく方向に変位し、第2の回転方向のトルク(モーメント−Mz)が作用したときに右側支持体20から遠ざかる方向に変位する。
そして、第1属性変位部に固定された第1属性変位電極と、右側支持体20の第1属性変位電極に対向する位置に固定された第1属性固定電極と、によって第1属性容量素子が構成され、第2属性変位部に固定された第2属性変位電極と、右側支持体20の第2属性変位電極に対向する位置に固定された第2属性固定電極と、によって第2属性容量素子が構成される。そうすれば、検出回路は、第1属性容量素子の静電容量値と、第2属性容量素子の静電容量値と、の差に相当する電気信号を、作用したトルクを示す電気信号として出力することができる。
図22の表に示す例の場合、検出部D1,D3が第1属性の検出部、検出部D2,D4が第2属性の検出部となり、第1属性変位電極E501,E503と第1属性固定電極E201,E203とによって、第1属性容量素子C1,C3が構成され、第2属性変位電極E502,E504と第2属性固定電極E202,E204とによって、第2属性容量素子C2,C4が構成される。図示のとおり、トルク+Mzが作用した場合、第1属性容量素子C1,C3の静電容量値は減少し、第2属性容量素子C2,C4の静電容量値は増加する。したがって、演算式「Mz=−C1+C2−C3+C4」に基づいて、第1属性容量素子C1,C3の静電容量値C1,C3の和「C1+C3」と、第2属性容量素子C2,C4の静電容量値C2,C4の和「C2+C4」と、の差を求めることにより、作用したトルクの向きと大きさを検出することができる。
また、§5−2で述べたとおり、この演算式「Mz=−C1+C2−C3+C4」に基づく差分検出を行えば、他軸成分の干渉を排除することができるため、このトルクセンサをロボットアームの関節の一部などに利用した場合にも、Fx,Fy,Fz,Mx,Myといった他軸成分を排除して、検出対象となるZ軸まわりのトルク(モーメントMz)のみを正確に検出することができるようになる。
<<< §7. 本発明に係るトルクセンサの変形例 >>>
これまで、§4〜§6において、本発明の基本的実施形態に係るトルクセンサについての説明を行ってきたが、ここでは、この基本的実施形態に対するいくつかの変形例を述べる。
<7−1.補助接続部材を付加した変形例>
上述したとおり、基本的実施形態に係るトルクセンサには、他軸成分の干渉を排除する機能が備わっている。すなわち、右側支持体20を固定した状態において、左側支持体10に、Fx,Fy,Fz,Mx,My,Mzという6軸成分を加えた場合、4組の容量素子C1〜C4の静電容量値の変動量は、図26の表に示すようになる。このため、§5−2で説明したとおり、演算式「Mz=−C1+C2−C3+C4」に基づく演算によって得られる値Mzには、モーメントMzの成分のみが含まれることになり、他の5軸成分の干渉を排除することができる。
これは、このトルクセンサが軸対称性を有しており、図26の表に示す結果を踏まえれば、他の5軸成分Fx,Fy,Fz,Mx,Myが作用した場合でも、上記演算式に基づく演算結果は0になるためである。図26の表には、変動量の絶対値の大きさに応じて、(+),+,++および(−),−,−−なる符号が記載されているが、基本構造部が軸対称性を有していれば、図25の表に示すとおり、表の同一行の数値の絶対値は互いに等しくなるので、他の5軸成分についての演算結果はいずれも0になる。
このように、理論的には、基本的実施形態に係るトルクセンサであれば、他軸成分の干渉を排除し、Z軸まわりのモーメントMzのみを正確に検出することができる。しかしながら、実際には、図25の表の同一行の数値の絶対値を完全に等しくすることは困難であり、多少なりとも誤差が生じることになる。別言すれば、実際の製品では、他の5軸成分の干渉を完全に排除した検出値を得ることはできない。もちろん、他軸成分の干渉が誤差として無視しうる範囲であれば実用上は問題はないが、ここで述べる変形例は、この他軸成分の干渉誤差をより低減するための工夫を施したものである。
図26の表において、検出対象となる本来の成分は、太線枠で囲って示すモーメントMzである。ところが、このMzの欄の符号が+および−であるのに対して、他軸成分であるMx,Myの欄の符号は++および−−になっており、絶対値としては、本来の成分Mzの変動量よりも、他軸成分Mx,Myの変動量の方が大きくなっている。具体的には、図25に示す例の場合、Mzの変動量の絶対値が「10」であるのに対して、Mx,Myの変動量の絶対値は、それぞれ「100」,「60」になっている。
もちろん、図25の表に示す結果は、特定の寸法で設計された特定の試作品について得られた値であるため、具体的な数値自体に意味はないが、図15に示す形態をもつ基本構造部を利用したトルクセンサでは、一般的な傾向として、成分Mzの変動量よりも、成分Mx,Myの変動量の方が大きくなる。これは、当該基本構造部が、Z軸まわりに回転させるよりも、X軸まわりもしくはY軸まわりに回転させる方が容易である、という特性を有しているためである。したがって、他軸成分Mx,Myは、本来の検出対象成分Mzの検出値に影響を与え易い成分ということができる。
図29および図30は、このような問題点に鑑み、他軸成分の干渉に起因する誤差をより低減するための工夫を施した変形例に係るトルクセンサの基本構造部の分解斜視図および側面図である。図15に示す基本的実施形態に係るトルクセンサの基本構造部との差は、補助接続部材23,24を付加した点のみである。図29には、補助接続部材23,24が、右側支持体20の左側面から左方に突出した部材として示されているが、実際には、図30の側面図に示すとおり、補助接続部材23,24は、環状変形体50の右側面と右側支持体20の左側面とを接続する部材であれば、どのような形態で設けてもかまわない。
図31は、図29に示す環状変形体50に補助接続部材23,24を接合した状態を、図29の右方向から見た正面図である。図示の例では、補助接続部材23,24は円柱状の部材であり、XY平面上への投影像はY軸上に位置する。図18に白ドットで示すとおり、Y軸上には左側接続点P11,P12が定義されており、補助接続部材23,24は、この左側接続点P11,P12の位置に接続されている。別言すれば、XY平面上において、補助接続部材23は、第1の左側接続部材11の接続位置(図31に破線で示す)に配置され、補助接続部材24は、第2の左側接続部材12の接続位置(図31に破線で示す)に配置されていることになる。
図32は、図29に示す基本構造部における補助接続部材23の近傍構造を示す部分断面図であり、白ドットは左側接続点P11を示している。すなわち、図32は、左側接続点P11を含みXZ平面に平行な平面で基本構造部を切った断面図に相当する(図の上下方向がZ軸方向になる)。図に破線で示す接続参照線Aは、左側接続点P11を通り、Z軸に平行な直線である。補助接続部材23は、この接続参照線Aを中心軸とする円柱状の部材であり、いわば、接続参照線Aの位置において、環状変形体50(連結部L2)と右側支持体20との間隔を一定に維持するための「つっかえ棒」として機能する。補助接続部材24も同様の機能を果たす。
図30の側面図を見れば明らかなように、「つっかえ棒」として機能する補助接続部材23,24を付加することにより、右側支持体20を固定した状態において、左側支持体10にX軸まわりのモーメントMxが作用しても、左側支持体10および環状変形体50の変位は抑制される。すなわち、モーメントMxが作用しても、図28に示すような変位は生じないことになる。また、補助接続部材23,24を付加すると、モーメントMyが作用したときに生じる変位を抑制する効果も得られる。これは、Y軸まわりの回転運動に対して、補助接続部材23,24が抵抗要素として機能するためである。
なお、ここに示す例では、補助接続部材23,24として、接続参照線A上に配置した円柱状部材を用いたが、もちろん、補助接続部材23,24の形状は円柱に限定されるものではない。また、補助接続部材23,24の位置は、必ずしも接続参照線A上である必要はなく、その近傍位置であれば、接続参照線Aから多少外れた位置に配置してもかまわない。たとえば、図31に示す例において、補助接続部材23の位置をY軸正方向に移動させ、補助接続部材24の位置をY軸負方向に移動させて、それぞれを環状変形体50の外側輪郭線の近傍位置に配置するようにしてもかまわない。あるいは、図に破線で示すように、環状変形体50のY軸との交差部分に、連結部L2を外側に拡張した突出部L2aと、連結部L4を外側に拡張した突出部L4aとを設け、補助接続部材23を突出部L2aの三角マークの位置に配置し、補助接続部材24を突出部L4aの三角マークの位置に配置するようにしてもよい。この場合、右側支持体20にも突出部L2a,L4aに対向する位置に同様の突出部を設けるようにすればよい。
要するに、補助接続部材23,24は、環状変形体50の連結部L2,L4(これを拡張した突出部を含む)の右側の側面と、右側支持体20(これを拡張した突出部を含む)の対向面との間の設けられた部材であって、左側接続点P11,P12を通り回転軸(Z軸)に平行な接続参照線Aを定義したときに、この接続参照線A上もしくはその近傍に配置された部材であれば、どのような部材であってもかまわない。なお、補助接続部材23,24は、いずれか一方のみを設けても、それなりの効果は得られるが、実用上は、両方を設けるようにするのが好ましい。
補助接続部材23,24を設ける目的は、本来の検出対象であるモーメントMzの作用によって生じる変位に比べて、他軸成分であるモーメントMx,Myの作用によって生じる変位を抑制し、他軸成分の干渉に起因する誤差をより低減することにある。このような目的を踏まえると、補助接続部材23,24としては、接続参照線Aに沿った方向に力が作用したときに比べて、接続参照線Aに直交する方向に力が作用したときの方が、弾性変形を生じ易い部材を用いるのが好ましい。
具体的には、たとえば、図32に示す例のように、金属や樹脂など、ある程度の弾性を有する素材からなる細長い棒状部材を補助接続部材23として用い、これを、接続参照線Aに沿って配置すればよい。そうすれば、右側支持体20を固定状態にして、左側支持体10に対して、接続参照線Aに沿った図の上下方向に力が作用したときには弾性変形は生じにくく、接続参照線Aに直交する図の左右方向に力が作用したときには弾性変形が生じ易くなる。
別言すれば、細長い棒状部材からなる補助接続部材23は、上下方向に伸縮する変形は生じにくいが、全体を左右に傾斜させるような変形は生じ易い。その結果、環状変位体50の図の上下方向への変位は十分に抑制されるので、モーメントMxの作用に基づく変位は大きく制限されるが、補助接続部材23の傾斜によって、環状変位体50の図の左右方向への変位はそれほど抑制されないので、モーメントMzの作用に基づく変位はあまり制限されないことになる。実際には、補助接続部材23,24を設けることにより、モーメントMyの作用に基づく変位や力Fzに基づく変位も抑制することができる。
図33は、図32に示す補助接続部材の近傍構造の変形例を示す部分断面図である。この変形例は、補助接続部材23をより傾斜しやすくする工夫を施したものであり、補助接続部材の両端の接続部分にダイアフラム構造を採用している。この変形例に係る基本構造部の形状は、これまで述べてきた基本的実施形態に係る基本構造部の構造と若干異なるため、図では、各部の符号末尾に「A」を付して示してある。すなわち、左側支持体10Aと環状変形体50A(連結部L2)とは、接続部材本体11Aと接続部材台座11Pとを有する左側接続部材によって接続されており、環状変形体50Aと右側支持体20Aとは補助接続部材23Aによって接続されている。
ここで、環状変形体50Aの補助接続部材23Aに対する接続部は、ダイアフラム部50dによって構成されており、右側支持体20Aの補助接続部材23Aに対する接続部分は、ダイアフラム部20dによって構成されている。このため、右側支持体20Aを固定した状態において、左側支持体10AにZ軸まわりのトルクが作用すると、作用したトルクによってダイアフラム部50d,20dが変形し、補助接続部材23Aが接続参照線Aに対して傾斜することになる。したがって、補助接続部材23Aを設けているにもかかわらず、検出対象となるトルク(モーメントMz)に基づく変位の自由度は十分に確保されることになる。
図32に示す補助接続部材23は、傾斜するために自分自身が変形を生じる必要があるため、なるべく細い棒状部材によって構成するのが好ましい。これに対して、図33に示す補助接続部材23Aは、ダイアフラム部50d,20dの変形により傾斜するため、補助接続部材23A自体は変形する必要がない。したがって、補助接続部材23Aとしては、太い剛性をもった部材を用いてもかまわない。傾斜角度を十分に確保する上では、補助接続部材23Aはなるべく長くするのが好ましい。
また、図示の例の場合、左側接続部材を接続部材本体11Aと接続部材台座11Pとによって構成しており、接続部材台座11Pが、ダイアフラム部50dを避け、その周囲部分に接続されるようにしているため、ダイアフラム部50dの変形が阻害されることはない。このため、補助接続部材23Aの傾斜の自由度は十分に確保されている。なお、図示の例では、環状変形体50Aにダイアフラム部50dを設け、右側支持体20Aにダイアフラム部20dを設け、補助接続部材23Aの上下両端をダイアフラム部を介して接続する構成を採っているが、上端のみ、もしくは、下端のみをダイアフラム部を介して接続する構成を採ってもかまわない。
図34は、図29に示す補助接続部材を付加した変形例における左側支持体10に、各軸方向の力もしくは各軸まわりのモーメントが作用したときの各容量素子の静電容量値の変動量(増減の程度)を示す表である。図26に示す表と比べると、Fzの欄、Mxの欄、Myの欄がいずれも(+)もしくは(−)になっていることがわかる。なお、この表における符号「(+)」,「(−)」に相当する変動量の数値範囲と、符号「+」,「−」に相当する変動量の数値範囲との具体的な区分基準は、図26の表における区分基準(絶対値が5未満であれば「(+)」,「(−)」、絶対値が5以上50未満であれば「+」,「−」)とは若干異なっているが、符号「(+)」,「(−)」が符号「+」,「−」に比べて十分小さな絶対値を示している点に変わりはない。
図26の表と図34の表とを比較すればわかるように、補助接続部材を付加することにより、力FzおよびモーメントMx,Myが作用したときの変動量の絶対値が小さくなっており、検出対象となるモーメントMzが作用したときの変動量の絶対値に比べて、他軸成分Fx,Fy,Fz,Mx,Myが作用したときの変動量の絶対値は相対的に小さくなる。したがって、他軸成分の干渉に起因する誤差をより低減することができる。
<7−2.合計8組の検出部を用いる変形例>
§6では、本発明を実施する際には、基本環状路R上に複数n個(n≧2)の検出点を定義し、各検出点にそれぞれ検出部Dを配置するのが好ましいことを述べた。基本的実施形態では、n=4に設定し、合計4組の検出部を用いていたが、ここに述べる変形例では、n=8に設定し、合計8組の検出部を用いることになる。そのため、この変形例に係るトルクセンサでは、図15に示す基本構造部における環状変形体50の代わりに、8組の検出部D11〜D18を備えた環状変形体60が用いられる。
なお、左側支持体10および右側支持体20の構造に変わりはない。したがって、XYZ三次元座標系を定義した場合、この変形例に係るトルクセンサの場合も、環状変形体60が原点Oを中心として基本平面となるXY平面上に配置され、左側支持体10がZ軸負領域に配置され、右側支持体20がZ軸正領域に配置され、Z軸まわりのトルクの検出が行われることになる。
図35は、この変形例に係るトルクセンサの環状変形体60の正面図(右側支持体20側から見た図)である。ここでも、XY平面上において、原点Oを中心としてX軸を反時計まわりに45°回転させた座標軸としてV軸が定義され、原点Oを中心としてY軸を反時計まわりに45°回転させた座標軸としてW軸が定義されている。基本的実施形態に係る環状変形体50は、図17の正面図に示すように、4組の検出部D1〜D4と4組の連結部L1〜L4とを交互に並べたものであったが、この変形例に係る環状変形体60は、図35の正面図に示すように、8組の検出部D11〜D18と8組の連結部L11〜L18とを交互に並べたものになる。
図36は、図35に示す環状変形体60を構成する検出部D11〜D18および連結部L11〜L18の配置を示す平面図である(ハッチングは、検出部の領域を示すものであり、断面を示すものではない)。図示のとおり、この環状変形体60は、一点鎖線で示す円形の基本環状路Rに沿って、第1の連結部L11、第1の検出部D11、第2の連結部L12、第2の検出部D12、第3の連結部L13、第3の検出部D13、第4の連結部L14、第4の検出部D14、第5の連結部L15、第5の検出部D15、第6の連結部L16、第6の検出部D16、第7の連結部L17、第7の検出部D17、第8の連結部L18、第8の検出部D18を、この順序で配置することにより構成される。
各検出部D11〜D18の基本構造は、これまで述べてきた各検出部D1〜D4の基本構造と同じである。たとえば、図35には、第1の変形部61,第2の変形部62,変位部63によって第1の検出部D11を構成した例が示されているが、ここで、第1の変形部61,第2の変形部62,変位部63は、図20に示す検出部Dの第1の変形部51,第2の変形部52,変位部53と同様の構成要素であり、変位部63には、絶縁層を介して変位電極が形成されることになる。
また、図15に示す環状変形体50の場合、左側面の2箇所が左側接続部材11,12によって左側支持体10に接続され、右側面の2箇所が右側接続部材21,22によって右側支持体20に接続されていたが、図35に示す環状変形体60の場合、左側面の4箇所が左側接続部材16,17,18,19によって左側支持体10に接続され、右側面の4箇所が右側接続部材26,27,28,29によって右側支持体20に接続されることになる。図35に破線で示されている領域は、4組の左側接続部材16,17,18,19が接続される領域のXY平面への投影像および4組の右側接続部材26,27,28,29が接続される領域のXY平面への投影像を示している。
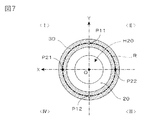
図37は、図35に示す環状変形体60の各検出点および各接続点の配置を示すXY平面上への投影図(右側支持体20側から見た図:環状変形体60は輪郭のみを示す)である。ここでも、左側接続点P16〜P19は白ドット、右側接続点P26〜P29は黒ドットで示されている。図36と図37とを対比すればわかるとおり、第1の左側接続点P16は第1の連結部L11に配置され、第1の右側接続点P26は第2の連結部L12に配置され、第2の左側接続点P17は第3の連結部L13に配置され、第2の右側接続点P27は第4の連結部L14に配置され、第3の左側接続点P18は第5の連結部L15に配置され、第3の右側接続点P28は第6の連結部L16に配置され、第4の左側接続点P19は第7の連結部L17に配置され、第4の右側接続点P29は第8の連結部L18に配置されている。
実際には、第1〜第4の左側接続点P16〜P19は、環状変形体60のZ軸負側の側面(左側面)上に定義された点であり、第1〜第4の右側接続点P26〜P29は、環状変形体60のZ軸正側の側面(右側面)上に定義された点であるので、図37に示す各接続点は、実際の接続点をXY平面上に投影した点ということになる。
結局、基本平面XY上に、回転軸Zとの交点Oを通り45°ずつの角度偏差をもって交差する4直線X,V,Y,Wを引いた場合に、第1の左側接続点P16および第3の左側接続点P18の正射影投影像が第1の直線X上に配置され、第1の右側接続点P26および第3の右側接続点P28の正射影投影像が第2の直線V上に配置され、第2の左側接続点P17および第4の左側接続点P19の正射影投影像が第3の直線Y上に配置され、第2の右側接続点P27および第4の右側接続点P29の正射影投影像が第4の直線W上に配置されていることになる。
より詳細に説明すれば、環状変形体60の両側面をXY平面上に投影して正射影投影像を得た場合に、第1の左側接続点P16の投影像は正のX軸上、第2の左側接続点P17の投影像は正のY軸上、第3の左側接続点P18の投影像は負のX軸上、第4の左側接続点P19の投影像は負のY軸上に配置されており、第1の右側接続点P26の投影像は正のV軸上、第2の右側接続点P27の投影像は正のW軸上、第3の右側接続点P28の投影像は負のV軸上、第4の右側接続点P29の投影像は負のW軸上に配置されていることになる。
そして、第1の左側接続部材16は、第1の左側接続点P16と左側支持体10とを接続し、第2の左側接続部材17は、第2の左側接続点P17と左側支持体10とを接続し、第3の左側接続部材18は、第3の左側接続点P18と左側支持体10とを接続し、第4の左側接続部材19は、第4の左側接続点P19と左側支持体10とを接続する。また、第1の右側接続部材26は、第1の右側接続点P26と右側支持体20とを接続し、第2の右側接続部材27は、第2の右側接続点P27と右側支持体20とを接続し、第3の右側接続部材28は、第3の右側接続点P28と右側支持体20とを接続し、第4の右側接続部材29は、第4の右側接続点P29と右側支持体20とを接続する。
このように、環状変形体60は、その左側の4箇所において左側支持体10に接続され、その右側の4箇所において右側支持体20に接続されるため、左側支持体10と環状変形体60との間の接続状態および環状変形体60と右側支持体20との間の接続状態は、非常に頑強なものになる。したがって、このトルクセンサをロボットアーム等の関節として利用した場合にも、十分な堅牢性を確保することができる。
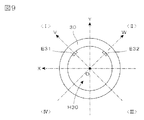
一方、図37に示すとおり、基本環状路R上には、8個の検出点Q11〜Q18が定義されている。具体的には、V軸とX軸との中間位置にVX軸を定義し、V軸とY軸との中間位置にVY軸を定義し、W軸とY軸との中間位置にWY軸を定義し、W軸とX軸(負方向)との中間位置にWX軸を定義すれば、第1の検出点Q11はVX軸正領域、第2の検出点Q12はVY軸正領域、第3の検出点Q13はWY軸正領域、第4の検出点Q14はWX軸正領域、第5の検出点Q15はVX軸負領域、第6の検出点Q16はVY軸負領域、第7の検出点Q17はWY軸負領域、第8の検出点Q18はWX軸負領域にそれぞれ配置されている。
一般論としては、第i番目の検出点(1≦i≦8)をQiとすれば、検出点Qiの位置は、XY平面上において、原点Oを起点として、X軸正方向に対して反時計まわりに角度θをなす方位ベクトルVec(θ)を定義したときに、方位ベクトルVec(π/8+(i−1)・π/4)と基本環状路Rとの交点位置ということになる。たとえば、第1番目の検出点Q11は、X軸正方向に対して、反時計まわりに角度22.5°をなす方位ベクトルVec(π/8)と基本環状路Rとの交点位置ということになる。
8組の検出部D11〜D18は、各検出点Q11〜Q18の位置に配置されるので、結局、図35の正面図に示すとおり、検出部D11〜D18は、X軸,V軸,Y軸,W軸の中間位置に配置されることになる。右側支持体20を固定した状態において、左側支持体10にトルク(モーメントMz)が作用すると、図35におけるV軸およびW軸上に配置された右側接続部材26,27,28,29によって環状変形体60の各部が固定された状態において、X軸およびY軸上に配置された左側接続部材16,17,18,19に時計まわりもしくは反時計まわりの力が作用することになる。したがって、各検出部D11〜D18には、その位置に応じて、圧縮力f1もしくは伸張力f2が作用することになり、各検出部D11〜D18の変位部に設けられた変位電極と右側支持体20の対向面に設けられた固定電極とによって構成される容量素子C11〜C18の電極間距離が変化し、静電容量値C11〜C18が増減することになる。
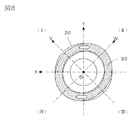
図38は、図35に示す8組の検出部D11〜D18を用いる変形例について、右側支持体20を固定した状態で、左側支持体10に各軸方向の力もしくは各軸まわりのモーメントが作用したときの各容量素子の静電容量値の変動量(増減の程度)を示す表である。Mzの欄が太線枠で囲って示されているが、これは、このトルクセンサによって本来検出されるべき力成分が、モーメントMz(Z軸まわりのトルク)であることを示している。
この図38の表においても、大まかな絶対値を示すため、静電容量値が増加する場合は、「(+)」,「+」,「++」の3通りの符号を用い、静電容量値が減少する場合は、「(−)」,「−」,「−−」の3通りの符号を用いている。「++」は「+」に比べて変動量が大きいことを示し、「(+)」は「+」に比べて変動量が小さいことを示す。同様に、「−−」は「−」に比べて変動量が大きいことを示し、「(−)」は「−」に比べて変動量が小さいことを示す。
左側支持体10にモーメント+Mzが作用すると、図35において、右側接続部材26,27,28,29の位置を固定した状態で、左側接続部材16,17,18,19の位置を反時計まわりに移動させる力が加わることになるので、奇数番目の検出部D11,D13,D15,D17には圧縮力f1が作用し、偶数番目の検出部D12,D14,D16,D18には伸張力f2が作用する。このため、奇数番目の容量素子C11,C13,C15,C17の静電容量値は増加し、偶数番目の容量素子C12,C14,C16,C18の静電容量値は減少する。図38の表のMzの行は、このような変動を示すものである。
このような変動が生じることを踏まえれば、8組の容量素子C11〜C18の静電容量値に基づく差分演算を行うことにより、モーメントMz(検出対象となるトルク)を算出することができる。図39は、このような差分演算を行う式のバリエーションを示す表である。図39(a)に示す演算式「Mz=+C11−C12+C13−C14+C15−C16+C17−C18」は、8組の容量素子C11〜C18の静電容量値をすべて用いた差分演算を行う式であり、実用上は最も好ましい演算式である。一方、図39(b)に示す演算式「Mz=+C11−C12+C15−C16」、図39(c)に示す演算式「Mz=+C13−C14+C17−C18」、図39(d)に示す演算式「Mz=−C12+C13−C16+C17」、図39(e)に示す演算式「Mz=+C11−C14+C15−C18」は、いずれも8組の静電容量値C11〜C18の中から選択された4組の静電容量値を用いた差分演算を行う式であり、やはり差分演算によってモーメントMz(検出対象となるトルク)を算出することができる。
理論的には、図39(a)〜(e)のいずれの演算式を採用した場合でも、他軸成分(Fx,Fy,Fz,Mx,My)は相殺され、§5−2で述べたように、他軸成分の干渉による誤差を排除することができる。ただ、§7−1で述べたように、図38の表においても、成分Mzの変動量「+」,「−」に比べて、成分Mx,Myの変動量「++」,「−−」は大きくなる。したがって、この§7−2で述べる合計8組の検出部を用いる変形例についても、§7−1で述べた補助接続部材を付加した変形例を適用すれば、他軸成分の干渉に起因する誤差をより低減する効果が得られる。
具体的には、図37に白ドットで示す左側接続点P16〜P19(必ずしも全部でなくてかまわない)の位置もしくはその近傍に、補助接続部材を設ければよい。もちろん、この補助接続部材は、§7−1で述べたように、環状変形体60右側面と右側支持体20の対向面との間を接続する部材であり、「つっかえ棒」としての役割を果たすことができる。なお、図31に破線および三角マークで示した例と同様に、この図37に示す例においても環状変形体60の一部(具体的には、X軸およびY軸との交差部分)を外側に拡張して突出部を設け、白ドットで示す位置の代わりに、この突出部の位置に補助接続部材を配置してもかまわない。
図40は、図35に示す8組の検出部を用いる変形例に、更に、補助接続部材を付加したトルクセンサにおける左側支持体10に、各軸方向の力もしくは各軸まわりのモーメントが作用したときの各容量素子の静電容量値の変動量(増減の程度)を示す表である。図38に示す表と比べると、Fzの欄、Mxの欄、Myの欄がいずれも(+)もしくは(−)になっており、他軸成分の干渉に起因する誤差がより低減されることがわかる。
<7−3.検出部の構造に関する変形例>
本発明の環状変形体50,60に設ける検出部Dの構造として、図19(a)には、第1の板状片51,第2の板状片52,変位部53を有する構造を例示した。この例の場合、第1の板状片51および第2の板状片52は、法線Nに対して傾斜しており、かつ、第1の板状片51の傾斜方向と第2の板状片52の傾斜方向とが逆向きとなっている。このような構成を採ると、図19(b)に示すように、圧縮力f1が作用した場合には、変位部53は図の下方に移動し、伸張力f2が作用した場合には、変位部53は図の上方に移動するので、容量素子Cの静電容量値の増減により、作用したトルクの向きおよび大きさを検出することができる。
しかしながら、本発明に利用可能な検出部Dの構造は、この図19(a)に例示する構造に限定されるものではない。図41は、検出部Dの構造のバリエーションを示す部分断面図である。
図41(a)に示す検出部DBは、環状変形体50Bの一部に設けられた検出部であり、第1の板状片51B,第2の板状片52B,変位部53B,第1の橋梁部54B,第2の橋梁部55Bを有している。図示のとおり、変位部53B,第1の橋梁部54B,第2の橋梁部55Bは、いずれもXY平面(基本環状路Rを含む平面)に対して平行になるように配置された板状の構成要素であり、第1の板状片51B,第2の板状片52Bは、いずれもXY平面に対して直交するように(法線Nに対して平行になるように)配置された板状の構成要素である。
図19(a)に示す検出部Dの場合、第1の板状片51および第2の板状片52が互いに逆向きになるように傾斜しているが、図41(a)に示す検出部DBの場合、第1の板状片51B,第2の板状片52Bは互いに平行な状態になっている。したがって、この検出部DBでは、圧縮力f1が作用した場合も、伸張力f2が作用した場合も、第1の板状片51Bおよび第2の板状片52Bが法線Nに対して傾斜するので、いずれの場合も変位部53Bは図の上方に移動することになる。したがって、容量素子Cの静電容量値の増減により、作用したトルクの向きを検出することはできないが、作用するトルクの方向が定まっている用途であれば、検出部DBにより作用したトルクの大きさを検出することが可能である。
図41(b)に示す検出部DCは、環状変形体50Cの一部に設けられた検出部であり、第1の板状片51C,第2の板状片52C,変位部53C,第1の橋梁部54C,第2の橋梁部55Cを有している。図示のとおり、変位部53C,第1の橋梁部54C,第2の橋梁部55Cは、いずれもXY平面(基本環状路Rを含む平面)に対して平行になるように配置された板状の構成要素であり、第1の板状片51C,第2の板状片52Cは、法線Nに対して、互いに逆向きになるように傾斜して配置された板状の構成要素である。ただ、図19(a)に示す検出部Dとは、傾斜の態様が異なっており、板状片51C,52C間の距離は、図の下方にゆくほど広がっている。
この検出部DCでは、圧縮力f1が作用した場合には、変位部53Cは図の上方に移動し、伸張力f2が作用した場合には、変位部53Cは図の下方に移動することになり、図19(a)に示す検出部Dとは変位の方向が逆になるものの、容量素子Cの静電容量値の増減により、作用したトルクの向きおよび大きさを検出することができる。
もちろん、検出部Dとしては、この他にも様々な構造のものを採用することができる。本発明に用いる検出部としては、要するに、基本環状路Rに沿った方向に圧縮力f1や伸張力f2が作用したときに、変位部が右側支持体20に対して変位するような構造であれば、どのような構造のものであってもかまわない。
<7−4.矩形状の環状変形体を用いた変形例>
図17に示す環状変形体50や図35に示す環状変形体60は、内周の輪郭および外周の輪郭がともに円形をなすドーナツ状の構造体であるが、本発明に用いる環状変形体は、必ずしも円形である必要はなく、楕円状、矩形状、三角形状など、任意形状の構造体であってもかまわない。要するに、ループをなす基本環状路Rに沿った構造体であれば、どのような形状の環状変形体を用いてもかまわない。
図42は、本発明に利用可能な正方形状の環状変形体60Sの正面図(右側支持体20側から見た図)である。この環状変形体60Sは、内周の輪郭および外周の輪郭がともに正方形をなす構造体であり、X軸に平行な上辺橋梁部および下辺橋梁部と、Y軸に平行な左辺橋梁部および右辺橋梁部と、を有している。上辺橋梁部には2組の検出部D12S,D13Sが配置され、左辺橋梁部には2組の検出部D14S,D15Sが配置され、下辺橋梁部には2組の検出部D16S,D17Sが配置され、右辺橋梁部には2組の検出部D18S,D11Sが配置されている。
図43は、図42に示す正方形状の環状変形体60Sの検出部および連結部の配置を示す平面図である(ハッチングは、検出部の領域を示すものであり、断面を示すものではない)。図示のとおり、この環状変形体60Sは、一点鎖線で示す正方形の基本環状路RSに沿って、第1の連結部L11S、第1の検出部D11S、第2の連結部L12S、第2の検出部D12S、第3の連結部L13S、第3の検出部D13S、第4の連結部L14S、第4の検出部D14S、第5の連結部L15S、第5の検出部D15S、第6の連結部L16S、第6の検出部D16S、第7の連結部L17S、第7の検出部D17S、第8の連結部L18S、第8の検出部D18Sを、この順序で配置することにより構成される。
各検出部D11S〜D18Sの基本構造は、これまで述べてきた各検出部D1〜D4の基本構造とほぼ同じである。たとえば、図42には、第1の変形部61S,第2の変形部62S,変位部63Sによって第1の検出部D11Sを構成した例が示されているが、ここで、第1の変形部61S,第2の変形部62S,変位部63Sは、図20に示す検出部Dの第1の変形部51,第2の変形部52,変位部53と同様の構成要素であり、変位部63Sには、絶縁層を介して変位電極が形成されることになる。
また、図42に示す環状変形体60Sの場合、左側面の4箇所が左側接続部材16S,17S,18S,19Sによって左側支持体10に接続され、右側面の4箇所が右側接続部材26S,27S,28S,29Sによって右側支持体20に接続されることになる。図42に破線で示されている領域は、4組の左側接続部材16S,17S,18S,19Sが接続される領域のXY平面への投影像および4組の右側接続部材26S,27S,28S,29Sが接続される領域のXY平面への投影像を示している。
図44は、図43に示す正方形状の環状変形体60Sの各検出点および各接続点の配置を示すXY平面上への投影図(右側支持体20側から見た図:環状変形体60Sは輪郭のみを示す)である。ここでも、左側接続点P16〜P19は白ドット、右側接続点P26〜P29は黒ドットで示されている。図43と図44とを対比すればわかるとおり、第1の左側接続点P16は第1の連結部L11Sに配置され、第1の右側接続点P26は第2の連結部L12Sに配置され、第2の左側接続点P17は第3の連結部L13Sに配置され、第2の右側接続点P27は第4の連結部L14Sに配置され、第3の左側接続点P18は第5の連結部L15Sに配置され、第3の右側接続点P28は第6の連結部L16Sに配置され、第4の左側接続点P19は第7の連結部L17Sに配置され、第4の右側接続点P29は第8の連結部L18Sに配置されている。
一方、図44に示すとおり、基本環状路RS上には、8個の検出点Q11〜Q18が定義されている。個々の検出点Q11〜Q18は、それぞれ白ドットで示す左側接続点とこれに隣接する黒ドットで示す右側接続点との中間位置に定義される。8組の検出部D11S〜D18Sは、各検出点Q11〜Q18の位置に配置されるので、結局、図42の正面図に示す各位置に配置されることになる。詳しい説明は省略するが、このような正方形状の環状変形体60Sに設けられた8個の検出部D11S〜D18Sによって構成される8組の容量素子の静電容量値に基づく所定の演算を行うことにより、Z軸まわりに作用したトルク(モーメントMz)を、他軸成分の干渉による誤差を排除した状態で検出することが可能である。
もちろん、図44の白ドットで示す位置に、§7−1で述べた補助接続部材をそれぞれ設けるようにすれば、図40の表を用いて説明したとおり、モーメントMx,Myの作用に基づく他軸成分の干渉による誤差をより効果的に排除することができるようになる。
<7−5.検出部の数に関する変形例>
これまで、§4〜§6において4組の検出部D1〜D4を用いる基本的実施形態を説明し、§7−2において8組の検出部D11〜D18を用いる変形例を説明した。また、これらの実施例では、いずれも差分検出を行うことにより、他軸成分の干渉による誤差を排除した検出結果が得られることも説明した。ただ、検出部の数が増えれば増えるほど、製造コストが高騰することは否めない。そこで、製造コストの低減を優先する場合には、これまで述べてきた実施例における検出部の一部を割愛し、検出部の数を低減させることも可能である。
既に述べたとおり、差分検出を行うと、同相ノイズやゼロ点ドリフトを抑えた安定したトルク検出が可能になり、また、温度による各部の膨張の影響を相殺して、精度の高い検出値を得るのにも貢献できるので有利である。このような差分検出を行うには、静電容量値の増減関係が逆転する2組の容量素子を用いればよい。
具体的には、§4〜§6で述べた基本的実施形態の場合、図26の表に示されている4組の容量素子C1〜C4のうち、Mzの行の符号欄に異符号が記載されている2組の容量素子を選択すれば、選択した2組の容量素子のみを用いた差分検出が可能である。たとえば、容量素子C1とC2のみを用いて、Mz=C2−C1なる演算式に基づいて、トルクMzを検出してもよい。また、§7−2で述べた変形例の場合、図38の表に示されている8組の容量素子C11〜C18のうち、Mzの行の符号欄に異符号が記載されている2組の容量素子を選択すれば、選択した2組の容量素子のみを用いた差分検出が可能である。
したがって、本発明を実施するにあたり、環状変形体に設ける検出部は、必ずしも4組や8組にする必要はなく、少なくとも2組用意しておけば、差分検出が可能である。もっとも、2組の検出部だけでは、他軸成分の干渉による誤差を排除した検出結果を得ることはできない。たとえば、図26の表によれば、容量素子C1とC2のみを用いて、Mz=C2−C1なる演算式でトルクMzの検出値を得ることができるが、この表のFxの行やMyの行の符号欄を参照すれば、「C2−C1」なる演算結果には、FxやMyの成分も含まれていることが理解できよう。
したがって、実用上は、他軸成分の干渉が生じない環境での利用を前提としたセンサ(たとえば、Z軸を中心軸とする円筒内に収容して用いるような場合を前提としたセンサ)であれば、検出部の数を2に絞って、製造コストを低減させることができる。
もちろん、検出部の数を1に絞ることも可能である。理論的には、検出部が1個あれば、1組の容量素子の静電容量値の増減に基づいて、トルクの向きおよび大きさを検出することが可能である。ただ、1組の検出部のみでは差分検出ができないため、温度環境の変化による誤差等が生じることになり、検出精度の低下は否めない。したがって、実用上は、高い検出精度は要求されないが、製造コストの低減が最優先されるような場合に、1個の検出部のみを有するトルクセンサを提供するようにすればよい。
<7−6.左右の支持体に関する変形例>
これまで述べてきた実施例では、たとえば、図15に示す例のように、回転軸Zが左右に伸びる水平線をなすような基準観察方向から見たときに、環状変形体50の左側に隣接する位置に左側支持体10を配置し、環状変形体50の右側に隣接する位置に右側支持体20を配置していた。別言すれば、環状変形体50の左右両側に一対の支持体10,20を配置していた。しかしながら、一対の支持体10,20は、検出対象となるトルクを環状変形体50に伝達して変形を生じさせる機能を果たし、容量素子の静電容量値の変化として当該トルクの検出が可能になるような配置であれば、必ずしも環状変形体50の左右を両側から挟むように配置する必要はない。
このように、一対の支持体は、必ずしも環状変形体50に対して左側および右側の位置に配置する必要はないので、以下の説明では、一方の支持体を作用支持体、他方の支持体を固定支持体と呼ぶことにする。作用支持体は、これまで述べてきた左側支持体10に相当し、固定支持体は、これまで述べてきた右側支持体20に相当する。固定支持体は、トルク検出時に固定状態もしくは負荷が加わった状態にされる支持体であり、これまで述べてきた実施例の場合、容量素子Cを構成する固定電極が形成される支持体である。一方、作用支持体は、固定支持体を固定状態もしくは負荷が加わった状態にした場合に、環状変形体50に対してトルクを作用させる機能を果たす。
もっとも、これまで述べてきた実施例では、便宜上、右側支持体20(固定支持体)を固定した状態において、左側支持体10(作用支持体)に作用したトルクを検出するという説明を行ったが、逆に、左側支持体10を固定した状態において、右側支持体20に作用したトルクを検出することにしても、その動作原理は作用反作用の法則により同じになる。したがって、上述した作用支持体および固定支持体という文言も、便宜上、一方を固定した状態において他方に作用したトルクを検出するという状況を想定して一方を固定支持体と呼び、他方を作用支持体と呼んでいるだけであり、両者を入れ替えても、検出原理上は問題はない。
図45は、作用支持体70を環状変形体50の外側に配置した変形例の基本構造部の側面図である。図示の便宜上、作用支持体70および作用接続部材71,72については断面を示し、その他の構成要素については側面を示す。なお、検出部に関しては、手前に位置する検出部D2,D3の外周面のみを示してある。この変形例は、図16に示す実施例の左側支持体10および左側接続部材11,12を、作用支持体70および作用接続部材71,72に置き換えたものであり、その他の構成は図16に示す実施例と全く同じである。
図46は、図45に示す基本構造部から固定支持体20を取り外し、環状変形体50および作用支持体70のみを図45の右方向から見た正面図である。作用支持体70は、環状変形体50をその外側から取り囲むように配置された円環状構造体であり、図46に示すとおり、環状変形体50と作用支持体70とは、いずれもZ軸を中心軸として同心配置される。第1の作用接続部材71は、Y軸正領域上に配置され、作用支持体70の内周面と環状変形体50の外周面(連結部L2の外周面)とを接続する。同様に、第2の作用接続部材72は、Y軸負領域上に配置され、作用支持体70の内周面と環状変形体50の外周面(連結部L4の外周面)とを接続する。
したがって、この変形例の場合、環状変形体50の外周面とY軸正領域との交点位置に第1の作用接続点P71が定義され、環状変形体50の外周面とY軸負領域との交点位置に第2の作用接続点P72が定義されている。第1の作用接続部材71は、第1の作用接続点P71を作用支持体70の内周面に接続する機能を果たし、第2の作用接続部材72は、第2の作用接続点P72を作用支持体70の内周面に接続する機能を果たす。
もちろん、作用接続点P71,P72の位置は、図示のようなY軸上の位置に限定されるものではなく、基本平面(XY平面)に関して、作用接続点P71,P72の正射影投影像と固定接続点P21,P22(図18に示す右側接続点P21,P22)の正射影投影像とが、互いに異なる位置に形成されるのであれば、任意の位置に定義することができる。図示の変形例の場合、第1の作用接続点P71は、連結部L2の表面の任意の位置(必ずしも外周面でなくてもよい)に定義することができ、第1の作用接続部材71は、当該第1の作用接続点P71を作用支持体70に接続すればよい。同様に、第2の作用接続点P72は、連結部L4の表面の任意の位置(必ずしも外周面でなくてもよい)に定義することができ、第2の作用接続部材72は、当該第2の作用接続点P72を作用支持体70に接続すればよい。
なお、固定支持体20については、容量素子Cを構成する固定電極E20を固定する必要があるため、環状変形体50の右側に隣接する位置に配置する必要がある。したがって、図45に示す変形例において、固定支持体20および固定接続部材21,22の構成は、図16に示す実施例における右側支持体20および右側接続部材21,22の構成と全く同じである。
図47は、作用支持体80を環状変形体50の内側に配置した変形例の基本構造部の側断面図(YZ平面で切断した断面を示す)である。この変形例は、図45に示す変形例の作用支持体70および作用接続部材71,72(いずれも、環状変形体50の外側に配置されている)を、作用支持体80および作用接続部材81,82(いずれも、環状変形体50の内側に配置されている)に置き換えたものであり、その他の構成は図45に示す変形例と全く同じである。
図48は、図47に示す基本構造部から固定支持体20を取り外し、環状変形体50および作用支持体80のみを図47の右方向から見た正面図である。作用支持体80は、環状変形体50の内側に配置された円柱状構造体であり、図48に示すとおり、環状変形体50と作用支持体80とは、いずれもZ軸を中心軸として同心配置される。なお、作用支持体80としては、必要があれば、円柱状構造体の代わりに、内部に貫通開口部H80が形成された円筒状構造体を用いてもかまわない。
第1の作用接続部材81は、Y軸正領域上に配置され、作用支持体80の外周面と環状変形体50の内周面(連結部L2の内周面)とを接続する。同様に、第2の作用接続部材82は、Y軸負領域上に配置され、作用支持体80の外周面と環状変形体50の内周面(連結部L4の内周面)とを接続する。
したがって、この変形例の場合、環状変形体50の内周面とY軸正領域との交点位置に第1の作用接続点P81が定義され、環状変形体50の内周面とY軸負領域との交点位置に第2の作用接続点P82が定義されている。第1の作用接続部材81は、第1の作用接続点P81を作用支持体80の外周面に接続する機能を果たし、第2の作用接続部材82は、第2の作用接続点P82を作用支持体80の外周面に接続する機能を果たす。
この変形例においても、作用接続点P81,P82の位置は、図示のようなY軸上の位置に限定されるものではなく、基本平面(XY平面)に関して、作用接続点P81,P82の正射影投影像と固定接続点P21,P22(図18に示す右側接続点P21,P22)の正射影投影像とが、互いに異なる位置に形成されるのであれば、任意の位置に定義することができる。図示の変形例の場合、第1の作用接続点P81は、連結部L2の表面の任意の位置(必ずしも内周面でなくてもよい)に定義することができ、第1の作用接続部材81は、当該第1の作用接続点P81を作用支持体80に接続すればよい。同様に、第2の作用接続点P82は、連結部L4の表面の任意の位置(必ずしも内周面でなくてもよい)に定義することができ、第2の作用接続部材82は、当該第2の作用接続点P82を作用支持体80に接続すればよい。
この変形例においても、固定支持体20については、容量素子Cを構成する固定電極E20を固定する必要があるため、環状変形体50の右側に隣接する位置に配置する必要がある。したがって、図47に示す変形例において、固定支持体20および固定接続部材21,22の構成は、図16に示す実施例における右側支持体20および右側接続部材21,22の構成と全く同じである。
もちろん、図45〜図48に示す変形例は、§7−1〜§7−5で述べた変形例と組み合わせて利用することができる。たとえば、図49は、§7−2で述べた変形例に、上述した図45,図46に示す変形例を組み合わせた例を示す図であり、図35に示す環状変形体60を作用支持体70によって外側から支持した状態を示している(右方向から見た正面図)。既に述べたとおり、環状変形体60は、合計8組の検出部D11〜D18を有しており、4組の右側接続部材(固定接続部材)26〜29(図では、その位置を破線で示す)によって右側支持体(固定支持体)20に固定される。
一方、作用支持体70は、環状変形体60をその外側から取り囲むように配置された円環状構造体であり、図49に示すとおり、環状変形体60と作用支持体70とは、いずれもZ軸を中心軸として同心配置され、両者間は4組の作用接続部材76〜79によって接続される。ここで、第1の作用接続部材76はX軸正領域上に配置され、第2の作用接続部材77はY軸正領域上に配置され、第3の作用接続部材78はX軸負領域上に配置され、第4の作用接続部材79はY軸負領域上に配置されており、いずれも作用支持体70の内周面と環状変形体60の外周面とを接続する。
したがって、この図49に示す変形例の場合、環状変形体60の外周面とX軸正領域との交点位置に第1の作用接続点P76が定義され、環状変形体60の外周面とY軸正領域との交点位置に第2の作用接続点P77が定義され、環状変形体60の外周面とX軸負領域との交点位置に第3の作用接続点P78が定義され、環状変形体60の外周面とY軸負領域との交点位置に第4の作用接続点P79が定義されている。
これに対して、図50は、§7−2で述べた変形例に、上述した図47,図48に示す変形例を組み合わせた例を示す図であり、図35に示す環状変形体60を作用支持体80によって内側から支持した状態を示している(右方向から見た正面図)。この変形例の場合も、環状変形体60は、合計8組の検出部D11〜D18を有しており、4組の右側接続部材(固定接続部材)26〜29(図では、その位置を破線で示す)によって右側支持体(固定支持体)20に固定される。
一方、作用支持体80は、環状変形体60の内部に配置された円柱状構造体であり(もちろん、円筒状構造体であってもかまわない)、図50に示すとおり、環状変形体60と作用支持体80とは、いずれもZ軸を中心軸として同心配置され、両者間は4組の作用接続部材86〜89によって接続される。ここで、第1の作用接続部材86はX軸正領域上に配置され、第2の作用接続部材87はY軸正領域上に配置され、第3の作用接続部材88はX軸負領域上に配置され、第4の作用接続部材89はY軸負領域上に配置されており、いずれも作用支持体80の外周面と環状変形体60の内周面とを接続する。
したがって、この図50に示す変形例の場合、環状変形体60の内周面とX軸正領域との交点位置に第1の作用接続点P86が定義され、環状変形体60の内周面とY軸正領域との交点位置に第2の作用接続点P87が定義され、環状変形体60の内周面とX軸負領域との交点位置に第3の作用接続点P88が定義され、環状変形体60の内周面とY軸負領域との交点位置に第4の作用接続点P89が定義されている。
要するに、図45〜図50に示す変形例に係る基本構造部を採用したトルクセンサでは、環状変形体の外側もしくは内側に隣接する位置に作用支持体を配置し、環状変形体の右側に隣接する位置に固定支持体を配置し、環状変形体の所定箇所に設けられた作用接続点と作用支持体とを作用接続部材によって接続し、環状変形体の所定箇所に設けられた固定接続点と固定支持体とを固定接続部材によって接続すればよい。
なお、図15に示すとおり、§4,§5で述べた基本的実施形態に係るトルクセンサの基本構造部では、左側接続部材11,12は、環状変形体50の左側の側面上に定義された左側接続点P11,P12と左側支持体10とを接続し、右側接続部材21,22は、環状変形体50の右側の側面上に定義された右側接続点P21,P22と右側支持体20とを接続する役割を果たしているが、左側接続点P11,P12は、必ずしも環状変形体50の左側の側面上に定義する必要はなく、環状変形体50の外周面や内周面に定義してもかまわない。同様に、右側接続点P21,P22は、必ずしも環状変形体50の右側の側面上に定義する必要はなく、環状変形体50の外周面や内周面に定義してもかまわない。
ただ、§4,§5で述べた基本的実施形態のように、環状変形体50の左右両脇に左側支持体10および右側支持体20を設ける構成を採る場合は、左側接続点P11,P12を環状変形体50の左側の側面上に定義し、右側接続点P21,P22を環状変形体50の右側の側面上に定義すれば、左側接続部材11,12および右側接続部材21,22の構造は単純化される(単に、左右の構成要素間を連結するブロック状の部材によって構成すればよい)。したがって、実用上は、左側接続点P11,P12を環状変形体50の左側の側面上に定義し、右側接続点P21,P22を環状変形体50の右側の側面上に定義するのが好ましい。
<7−7.検出部の別なバリエーション>
これまで、図19(a)に示す特有の構造をもった検出部Dを利用した実施形態を説明し、更に、図41(a),(b)には、そのバリエーションである検出部DB,DCを示した。もちろん、検出部としては、この他にも様々な構造のものを採用することができる。本発明に用いる検出部としては、要するに、基本環状路Rに沿った方向に圧縮力f1や伸張力f2が作用したときに、変位や撓みが生じる構造であれば、どのような構造のものであってもかまわない。ここでは、検出部Dの構造や配置に関する更に別のバリエーションを述べておく。
図19(a)に示す例の場合、検出点Qの位置に配置される検出部Dは、弾性変形を生じる第1の板状片51および第2の板状片52と、両端がこれらの板状片51,52によって支持された第3の板状片53とによって構成されており、第3の板状片53が変位部として機能する。ここで、検出点Qの位置にXY平面に直交する法線Nを立てたときに、第1の板状片51および第2の板状片52は、法線Nに対して傾斜しており、かつ、第1の板状片51の傾斜方向と第2の板状片52の傾斜方向とは逆向きになっている。また、トルクが作用していない状態において、第3の板状片53(変位部)の対向面と固定支持体20の対向面とは平行を維持する。
ここで、これまで述べてきた図17,図31,図35,図46,図48,図49,図50に示す実施例における検出部の平面形状に着目すると、第1の板状片51,61および第2の板状片52,62、ならびに第3の板状片53,63のXY平面への投影像はいずれも台形に近い扇形をしており、当該投影像の左右の輪郭線は原点Oに向かう半径に沿ったものになっている。たとえば、図17に示されている検出部D1を構成する板状片51,52,53の平面形状は、いずれも台形に近い扇形をしている。これは、環状変形体50が円環状をしているため、この円環に合わせて各検出部D1〜D4を設計したためである。
これに対して、図42に示す実施例では、たとえば、検出部D11Sを構成する板状片61S,62S,63Sの平面形状は、いずれも矩形をしている。これは、環状変形体60Sが方環状をしているため、この方環に合わせて各検出部D11S〜D18Sを設計したためである。
このように、これまで述べてきた実施例では、環状変形体の形状に合わせて、検出部を構成する各板状片の平面形状を扇形もしくは矩形にする設計を行っているが、各板状片の平面形状は、必ずしも上例のような使い分けを行う必要はない。たとえば、図17に示すように、円環状の環状変形体50を採用した場合であっても、各板状片51,52,53の平面形状がいずれも矩形となるような設計を行ってもかまわない。図17に示す実施例において、各板状片51,52,53の平面形状を図42の実施例に示す各板状片61S,62S,63Sのような矩形にすれば、検出部Dの立体構造を切削加工やワイヤーカット加工によって形成する場合、加工器具を同一方向に駆動する単純な工程を採用することができるようになり、センサを量産する上では好ましい。
また、これまで述べてきた実施形態では、変位部53,63がZ軸方向に変位する構造をもった検出部Dが用いられているが、変位部53,63の変位方向は必ずしもZ軸方向である必要はない。
図51は、図15に示す実施形態における環状変形体50の代わりに、検出部の向きを変えた環状変形体90およびその外側に配置された作用支持体70を示す平面図(上段の図)およびこれらに固定支持体120を付加することにより構成される基本構造部をXZ平面で切断した側断面図(下段の図)である。図15に示す環状変形体50に設けられていた4組の検出部D1〜D4は、図51に示す環状変形体90では4組の検出部D1’〜D4’に置き換えられている。ここで、4組の検出部D1’〜D4’の基本構造は図19(a)に示す検出部Dの構造に類似しているが、環状変形体上での向きが異なっている。
図51の検出部D1’を見るとわかるように、検出部D1’は、弾性変形を生じる第1の板状片91および第2の板状片92と、両端がこれらの板状片91,92によって支持された第3の板状片93とによって構成されており、第3の板状片93が変位部として機能する。ここで、各板状片91,92,93は、それぞれ図19(a)に示す各板状片51,52,53に対応するものであるが、環状変形体に対して配置される向きが異なっている。
すなわち、図15に示す環状変形体50に設けられている4組の検出部D1〜D4では、変位部53が環状変形体50の右方に位置しており、変位部53の右面が固定支持体20(右側支持体)の左面に対向している。これに対して、図51に示す環状変形体90に設けられている4組の検出部D1’〜D4’では、変位部93が環状変形体90の外側に位置しており、変位部93の外側面が作用支持体70の内周面に対向している。
別言すれば、図51に示す4組の検出部D1’〜D4’は、図15に示す4組の検出部D1〜D4を基本環状路Rを回転軸として90°回転させたような構造を有している。したがって、基本環状路Rに沿って圧縮力f1が作用すると、変位部93は外側に変位し(図19(b)参照)、基本環状路Rに沿って伸張力f2が作用すると、変位部93は内側に変位する(図19(c)参照)。
このように、図15に示す環状変形体50に設けられている4組の検出部D1〜D4では、変位部53がZ軸方向に変位するのに対して、図51に示す環状変形体90に設けられている4組の検出部D1’〜D4’では、変位部93が原点Oを中心としてXY平面上に描かれた円の半径方向に変位することになる。したがって、図51に示すとおり、変位部93の外側面に変位電極E90を形成し、これに対向する作用支持体70の内周面に固定電極E70を形成しておけば、これら一対の電極E90,E70によって容量素子Cを構成することができる。そして、当該容量素子Cの静電容量値は、変位部93の半径方向への変位を示すパラメータとして利用できる。
なお、この図51に示す変形例の場合、Y軸に沿った位置に固定接続部材121,122が配置され、固定支持体120に対する接続が行われ、X軸に沿った位置に作用接続部材73,74が配置され、作用支持体70に対する接続が行われている。これは、図15に示す実施例の接続形態とは異なっている。すなわち、図15に示す実施例の場合、X軸に沿った位置に固定接続部材21,22が配置され、固定支持体20に対する接続が行われ、Y軸に沿った位置に作用接続部材11,12が配置され、作用支持体10に対する接続が行われている。
このため、図51に示す4組の検出部D1’〜D4’について形成された4組の容量素子C1’〜C4’の挙動は、図15に示す4組の検出部D1〜D4について形成された4組の容量素子C1〜C4の挙動と逆になる。すなわち、図51に示す変形例における容量素子C1’〜C4’の挙動は、図22に示すテーブルにおける応力欄のf1,f2の関係を逆転させ、変動量欄の符号を逆転させたものになる。このため、トルクMzを算出するための演算式は、Mz=+C1−C2+C3−C4になるが、これは上述したように、接続形態を若干変更したためであり、本質的な相違ではない。
また、図15に示す実施例では、中央に貫通開口部H20を有する環状の固定支持体20が設けられているのに対して、図51(b)に示す変形例では、開口部のない円盤状の固定支持体120が設けられているが、この点も本質的な相違ではない。前述したとおり、図15に示す実施例では、3つの構成要素10,20,50のすべてに貫通開口部が設けられているため、必要があれば、Z軸に沿って任意の軸を挿通させることが可能になるが、そのような必要がなければ、図51(b)に示す例のように、円盤状の固定支持体120を用いれば十分である。
この図51に示す変形例は、次の2つの重要な点を示している。第1の点は、検出素子として容量素子を用いる場合、当該容量素子の電極間隔の変化は、必ずしもZ軸方向に関するものである必要はない、という点である。図51に示す例は、容量素子の電極間隔の変化が半径方向に生じる例であるが、もちろん、電極間隔の変化が他の任意の方向に生じるような容量素子を用いてもかまわない。
そして、第2の点は、検出素子として容量素子を用いる場合、変位電極E90は検出部(すなわち、環状変形体)に設ける必要があるが、当該変位電極E90に対向する固定電極E70は、必ずしも固定支持体120に設ける必要はなく、作用支持体70に設けてもかまわない、という点である。§7−6までに述べてきた各実施形態では、固定電極はいずれも固定支持体側に設けられているが、図51に示す変形例の場合、固定電極E70は固定支持体120ではなく、円環状の作用支持体70の内周面に設けられている。ここで、作用支持体70は、トルクの作用により変位を生じることになり、その結果、固定電極E70についても変位が生じることになるが、トルクの作用による当該変位は作用支持体70の内周面に沿ったものになるので、各容量素子C1’〜C4’の電極間距離に影響を及ぼすことはなく、トルク検出に支障は生じない。
<7−8.ストレインゲージを用いた変形例>
ここでは、検出部の更に別な形態を示すとともに、検出素子として、ストレインゲージを用いた変形例を説明する。図52(a)に示す検出部DDは、環状変形体40の一部に設けられた検出部であり、1枚の板状変形部41からなる非常に単純な構造を有する。実際には、このような検出部DDが、環状変形体40の複数箇所に配置される。別言すれば、環状変形体40は、複数の板状変形部41と複数の連結部Lとを交互に配置してなるリング状の構造体ということになる。
板状変形部41は、検出対象となるトルクの作用により弾性変形を生じる構成要素であり、その板面は、XY平面(基本環状路Rを含む平面)に対して傾斜するように配置されている。これまで述べてきた各実施形態のように、検出素子として容量素子を用いる場合には、検出部DDのような単純な構造はあまり好ましくないが、検出素子としてストレインゲージを用いる場合には、この検出部DDのような単純な構造も十分に利用価値がある。
これまで述べてきた実施形態では、検出部に生じた弾性変形を検出する検出素子として容量素子を用いているが、本発明を実施する上で、検出素子は必ずしも容量素子に限定されるものではない。以下に述べる変形例は、検出素子として、検出部の弾性変形を生じる位置に固定されたストレインゲージを用い、検出回路として、このストレインゲージの電気抵抗の変動に基づいて、作用したトルクを示す電気信号を出力する回路を用いるものである。
図52(b),(c)は、図52(a)に示す検出部DDを構成する板状変形部41の弾性変形の態様を示す部分断面図である。図52(a)は、検出部DDに外力が作用していない状態を示しているが、検出部DDに、外力が作用すると、板状変形部41には図52(b),(c)に示すような撓みが生じることになる。
まず、環状変形体40の検出点Qの位置に、図52(b)に示すような圧縮力f1が作用した場合を考えてみる。この場合、板状変形部41は撓みを生じることになるが、その表面各部には、図に「−」もしくは「+」で示す応力が発生する。ここで、「+」は圧縮応力(すなわち、基本環状路Rに沿って縮める方向の応力)を示し、「−」は伸張応力(すなわち、基本環状路Rに沿って図の左右に広げる方向の応力)を示している。板状変形部41の表面に生じる応力は、図示のとおり、板状変形部41の連結部Lに対する接続端近傍に集中する。一方、検出点Qの位置に伸張力f2が作用した場合は、図52(b)とは逆符号の応力分布が得られる。
これに対して、図52(c)は、隣接する一対の連結部Lについて、縦方向の力が作用した場合に生じる応力分布を示している。具体的には、図示の例は、左側の連結部Lに対しては図の下方への力f3が作用し、右側の連結部Lに対しては図の上方への力f4が作用したときに生じる応力分布を示すものである。この場合も、やはり板状変形部41の表面に生じる応力は、板状変形部41の連結部Lに対する接続端近傍に集中する。ただ、本発明に係るセンサは、Z軸まわりに作用するモーメントを検出するトルクセンサであるので、検出対象となる力成分は、図52(b)に示す圧縮力f1もしくはこれと逆の伸張力f2であり、図52(c)に示すような力f3,f4を検出する必要はない。
このような応力発生現象を考慮すれば、図示のような板状変形部41からなる検出部DDを用いて、ストレインゲージによって検出部DDに生じた弾性変形を検出するには、板状変形部41の連結部Lに対する接続端近傍の両面に、各ストレインゲージを配置すると効果的な検出が可能になることがわかる。
図53は、このような考え方に基づき、図52(a)示す検出部DDに生じた弾性変形を検出する検出素子としてストレインゲージを用いた例を示す側面図(図(a))および上面図(図(b))である。なお、環状変形体40が円形の場合、基本環状路Rは円を構成することになるが、図53(b)では、説明の便宜上、基本環状路Rの一部を直線で示している。
図示のとおり、検出部DDを構成する板状変形部41について、左側の連結部Lに対する第1の接続端近傍の表側の面に第1のストレインゲージr1が張り付けられ、裏側の面に第2のストレインゲージr2が張り付けられている。同様に、右側の連結部Lに対する第2の接続端近傍の表側の面に第3のストレインゲージr3が張り付けられ、裏側の面に第4のストレインゲージr4が張り付けられている。
図54は、図53に示す4組のストレインゲージr1〜r4の検出結果に基づいて電気信号を出力するブリッジ回路108を示す回路図である。具体的には、このブリッジ回路108は、第1のストレインゲージr1と第4のストレインゲージr4とを第1の対辺とし、第2のストレインゲージr2と第3のストレインゲージr3とを第2の対辺とする回路になっており、ブリッジ電圧源eから所定の電圧を印加することにより動作する。このブリッジ回路108について、両出力端子T1,T2間に発生するブリッジ電圧を検出する検出回路を設けておけば、当該ブリッジ電圧は、図52(b)に示すような変形もしくはこれと逆の変形の程度を示すパラメータとして利用できる。
したがって、たとえば、図15に示す実施例の環状変形体50の4組の検出部D1〜D4を図52(a)に示す検出部DDに置き換えることにより構成される環状変形体40を用い、各検出部DDに図53に示すような4組のストレインゲージr1〜r4を配置して、図54に示すようなブリッジ回路108を構成すれば、個々のブリッジ回路108のブリッジ電圧は、図22のテーブルにおける応力を示すパラメータになる。したがって、これら4組のブリッジ電圧に対して、図22の演算式に準じた演算を行えば、作用したトルクの検出値を電気信号として得ることができる。
<7−9.本発明に係るトルクセンサの本質的な構成要素>
結局、これまで述べてきた基本的実施形態および種々の変形例を踏まえると、本発明に係るトルクセンサの本質は、次のような各構成要素を備え、所定の回転軸(Z軸)まわりのトルクを検出するトルクセンサということになる。
(1)回転軸に直交する基本平面(XY平面)上に、回転軸の周囲を取り囲むように基本環状路を定義したときに、この基本環状路に沿って伸びる環状変形体。
(2)環状変形体にトルクを作用させる作用支持体。
(3)環状変形体を固定する固定支持体。
(4)環状変形体の所定箇所に設けられた作用接続点を、作用支持体に接続する作用接続部材。
(5)環状変形体の所定箇所に設けられた固定接続点を、固定支持体に接続する固定接続部材。
(6)環状変形体に生じた弾性変形を検出する検出素子。
(7)検出素子の検出結果に基づいて、作用支持体および固定支持体の一方に負荷がかかった状態において他方に作用した回転軸まわりのトルクを示す電気信号を出力する検出回路。
ここで、環状変形体は、基本環状路上に定義された検出点に位置する検出部と、この検出部の両端に接続された連結部と、を有しており、作用接続点および固定接続点は、連結部に配置されており、基本平面への作用接続点の正射影投影像と基本平面への固定接続点の正射影投影像とは、互いに異なる位置に形成されている。また、検出部は、作用接続点と固定接続点との間に力が作用したときに、作用した力に基づいて弾性変形を生じる弾性変形構造部を有し、検出素子は、弾性変形構造部に生じた弾性変形を検出する。一方、連結部は、ある程度の可撓性を有していてもかまわないが、作用したトルクによって、検出部に効果的な変形を生じさせる上では、連結部はなるべく変形しない方が好ましい。したがって、実用上は、検出部の弾性変形構造部は、検出素子によって有意な検出が可能な弾性変形を生じる弾性変形体とし、連結部は、検出素子の検出感度においては有意な変形が検出されない剛体とするのが好ましい。
検出素子として容量素子を用いる場合には、検出部として、次のような特有の構造を採用するのが好ましい。すなわち、検出部が、検出対象となるトルクの作用により弾性変形を生じる第1の変形部と、検出対象となるトルクの作用により弾性変形を生じる第2の変形部と、第1の変形部および第2の変形部の弾性変形により変位を生じる変位部と、を有し、第1の変形部の外側端はこれに隣接する連結部に接続され、第1の変形部の内側端は変位部に接続され、第2の変形部の外側端はこれに隣接する連結部に接続され、第2の変形部の内側端は変位部に接続されているようにする。
また、検出素子を構成する容量素子は、検出部の所定位置に固定された変位電極と、作用支持体もしくは固定支持体の変位電極に対向する位置に固定された固定電極と、によって構成すればよい。ここで、変位電極は、検出部に生じた弾性変形に基づいて固定電極に対して変位を生じる位置に配置するようにし、検出回路が、容量素子の静電容量値の変動に基づいて、作用したトルクを示す電気信号を出力するようにすればよい。
なお、作用支持体は、回転軸が左右に伸びる水平線をなすような基準観察方向から見たときに、環状変形体の左側に隣接する位置、環状変形体の外側に隣接する位置、または、環状変形体の内側に隣接する位置、に配置するのが好ましく、固定支持体は、上記基準観察方向から見たときに、環状変形体の右側に隣接する位置に配置するのが好ましい。この場合、容量素子は、環状変形体の右側の側面の所定位置に固定された変位電極と、固定支持体の変位電極に対向する位置に固定された固定電極と、によって構成することができる。また、変位電極は、変位部の固定支持体に対向する位置に固定すればよい。
Claims (55)
- 所定の回転軸(Z)まわりのトルクを検出するトルクセンサであって、
前記回転軸(Z)に直交する基本平面(XY)上に、前記回転軸の周囲を取り囲むように基本環状路(R)を定義したときに、この基本環状路(R)に沿って伸びる環状変形体(50;60)と、
前記回転軸(Z)が左右に伸びる水平線をなすような基準観察方向から見たときに、前記環状変形体(50;60)の左側に隣接する位置に配置された左側支持体(10)と、 前記基準観察方向から見たときに、前記環状変形体(50;60)の右側に隣接する位置に配置された右側支持体(20)と、
前記環状変形体(50;60)の左側の側面上の左側接続点(P11,P12;P16〜P19)を、前記左側支持体(10)に接続する左側接続部材(11,12;16〜19)と、
前記環状変形体(50;60)の右側の側面上の右側接続点(P21,P22;P26〜P29)を、前記右側支持体(20)に接続する右側接続部材(21,22;26〜29)と、
前記環状変形体(50;60)の右側の側面の所定位置に固定された変位電極(E50)と、前記右側支持体(20)の前記変位電極(E50)に対向する位置に固定された固定電極(E20)と、によって構成される容量素子(C;C1〜C4;C11〜C18)と、
前記容量素子(C;C1〜C4;C11〜C18)の静電容量値の変動に基づいて、前記左側支持体(10)および前記右側支持体(20)の一方に負荷がかかった状態において他方に作用した前記回転軸(Z)まわりのトルクを示す電気信号を出力する検出回路(101〜105)と、
を備え、
前記環状変形体(50;60)は、前記基本環状路(R)上に定義された検出点(Q;Q1〜Q4;Q11〜Q18)に位置する検出部(D;D1〜D4;D11〜D18)と、この検出部の両端に接続された連結部(L;L1〜L4;L11〜L18)と、を有し、
前記検出部(D;D1〜D4;D11〜D18)は、検出対象となるトルクの作用により弾性変形を生じる第1の変形部(51;61)と、検出対象となるトルクの作用により弾性変形を生じる第2の変形部(52;62)と、前記第1の変形部および前記第2の変形部の弾性変形により変位を生じる変位部(53;63)と、を有し、
前記第1の変形部(51;61)の外側端はこれに隣接する連結部(L)に接続され、前記第1の変形部(51;61)の内側端は前記変位部(53;63)に接続され、前記第2の変形部(52;62)の外側端はこれに隣接する連結部(L)に接続され、前記第2の変形部(52;62)の内側端は前記変位部(53;63)に接続され、
前記変位電極(E50)は、前記変位部(53;63)の前記右側支持体(20)に対向する位置に固定され、
前記左側接続点(P11,P12;P16〜P19)および前記右側接続点(P21,P22;P26〜P29)は、前記連結部(L)に配置されており、前記基本平面(XY)への前記左側接続点(P11,P12;P16〜P19)の正射影投影像と前記基本平面(XY)への前記右側接続点(P21,P22;P26〜P29)の正射影投影像とは、互いに異なる位置に形成されることを特徴とするトルクセンサ。 - 請求項1に記載のトルクセンサにおいて、
基本環状路(R)上に複数n個(n≧2)の検出点(Q;Q1〜Q4;Q11〜Q18)が定義され、各検出点にそれぞれ検出部(D;D1〜D4;D11〜D18)が位置しており、環状変形体(50;60)が、n個の検出部(D;D1〜D4;D11〜D18)とn個の連結部(L;L1〜L4;L11〜L18)とを、基本環状路(R)に沿って交互に配置することにより構成されていることを特徴とするトルクセンサ。 - 請求項2に記載のトルクセンサにおいて、
基本環状路(R)上に偶数n個(n≧2)の検出点(Q;Q1〜Q4;Q11〜Q18)が定義され、各検出点にそれぞれ検出部(D;D1〜D4;D11〜D18)が位置しており、環状変形体(50;60)が、n個の検出部(D;D1〜D4;D11〜D18)とn個の連結部(L;L1〜L4;L11〜L18)とを、基本環状路(R)に沿って交互に配置することにより構成されていることを特徴とするトルクセンサ。 - 請求項3に記載のトルクセンサにおいて、
偶数n個の連結部(L;L1〜L4;L11〜L18)に対して、基本環状路(R)に沿って順に番号を付与したときに、右側接続点(P21,P22;P26〜P29)が奇数番目の連結部に配置され、左側接続点(P11,P12;P16〜P19)が偶数番目の連結部に配置されていることを特徴とするトルクセンサ。 - 請求項4に記載のトルクセンサにおいて、
n=2に設定することにより、基本環状路(R)に沿って、第1の連結部(L1)、第1の検出部(D1)、第2の連結部(L2)、第2の検出部(D2)を、この順序で配置することにより環状変形体が構成されており、右側接続点(P21)が第1の連結部(L1)に配置され、左側接続点(P11)が第2の連結部(L2)に配置されていることを特徴とするトルクセンサ。 - 請求項4に記載のトルクセンサにおいて、
n=4に設定することにより、基本環状路(R)に沿って、第1の連結部(L1)、第1の検出部(D1)、第2の連結部(L2)、第2の検出部(D2)、第3の連結部(L3)、第3の検出部(D3)、第4の連結部(L4)、第4の検出部(D4)を、この順序で配置することにより環状変形体(50)が構成されており、第1の右側接続点(P21)が第1の連結部(L1)に配置され、第1の左側接続点(P11)が第2の連結部(L2)に配置され、第2の右側接続点(P22)が第3の連結部(L3)に配置され、第2の左側接続点(P12)が第4の連結部(L4)に配置され、
左側接続部材(11,12)が、前記第1の左側接続点(P11)と左側支持体(10)とを接続する第1の左側接続部材(11)と、前記第2の左側接続点(P12)と左側支持体(10)とを接続する第2の左側接続部材(12)とを有し、
右側接続部材(21,22)が、前記第1の右側接続点(P21)と右側支持体(20)とを接続する第1の右側接続部材(21)と、前記第2の右側接続点(P22)と右側支持体(20)とを接続する第2の右側接続部材(22)とを有することを特徴とするトルクセンサ。 - 請求項6に記載のトルクセンサにおいて、
基本平面上(XY)に、回転軸(Z)との交点(O)を通り互いに直交する2直線(X,Y)を引いた場合に、第1の左側接続点(P11)および第2の左側接続点(P12)の正射影投影像が第1の直線上(Y)に配置され、第1の右側接続点(P21)および第2の右側接続点(P22)の正射影投影像が第2の直線上(X)に配置されていることを特徴とするトルクセンサ。 - 請求項6に記載のトルクセンサにおいて、
XYZ三次元座標系におけるZ軸まわりのトルクを検出するために、環状変形体(50)が原点Oを中心として基本平面となるXY平面上に配置され、左側支持体(10)がZ軸負領域に配置され、右側支持体(20)がZ軸正領域に配置され、
環状変形体(50)のZ軸負側の側面上に第1の左側接続点(P11)および第2の左側接続点(P12)が設けられ、環状変形体(50)のZ軸正側の側面上に第1の右側接続点(P21)および第2の右側接続点(P22)が設けられ、
環状変形体(50)の両側面をXY平面上に投影して正射影投影像を得た場合に、第1の右側接続点(P21)の投影像が正のX軸上、第2の右側接続点(P22)の投影像が負のX軸上、第1の左側接続点(P11)の投影像が正のY軸上、第2の左側接続点(P12)の投影像が負のY軸上に配置されており、
XY平面上において、原点Oを中心としてX軸を反時計まわりに45°回転させた座標軸としてV軸を定義し、原点Oを中心としてY軸を反時計まわりに45°回転させた座標軸としてW軸を定義した場合に、第1の検出点(Q1)が正のV軸上、第2の検出点(Q2)が正のW軸上、第3の検出点(Q3)が負のV軸上、第4の検出点(Q4)が負のW軸上に配置されていることを特徴とするトルクセンサ。 - 請求項4に記載のトルクセンサにおいて、
n=8に設定することにより、基本環状路(R)に沿って、第1の連結部(L11)、第1の検出部(D11)、第2の連結部(L12)、第2の検出部(D12)、第3の連結部(L13)、第3の検出部(D13)、第4の連結部(L14)、第4の検出部(D14)、第5の連結部(L15)、第5の検出部(D15)、第6の連結部(L16)、第6の検出部(D16)、第7の連結部(L17)、第7の検出部(D17)、第8の連結部(L18)、第8の検出部(D18)を、この順序で配置することにより環状変形体(60)が構成されており、第1の左側接続点(P16)が第1の連結部(L11)に配置され、第1の右側接続点(P26)が第2の連結部(L12)に配置され、第2の左側接続点(P17)が第3の連結部(L13)に配置され、第2の右側接続点(P27)が第4の連結部(L14)に配置され、第3の左側接続点(P18)が第5の連結部(L15)に配置され、第3の右側接続点(P28)が第6の連結部(L16)に配置され、第4の左側接続点(P19)が第7の連結部(L17)に配置され、第4の右側接続点(P29)が第8の連結部(L18)に配置され、
左側接続部材(16〜19)が、前記第1の左側接続点(P16)と左側支持体(10)とを接続する第1の左側接続部材(16)と、前記第2の左側接続点(P17)と左側支持体(10)とを接続する第2の左側接続部材(17)と、前記第3の左側接続点(P18)と左側支持体(10)とを接続する第3の左側接続部材(18)と、前記第4の左側接続点(P19)と左側支持体(10)とを接続する第4の左側接続部材(19)とを有し、
右側接続部材(26〜29)が、前記第1の右側接続点(P26)と右側支持体(20)とを接続する第1の右側接続部材(26)と、前記第2の右側接続点(P27)と右側支持体(20)とを接続する第2の右側接続部材(27)と、前記第3の右側接続点(P28)と右側支持体(20)とを接続する第3の右側接続部材(28)と、前記第4の右側接続点(P29)と右側支持体(20)とを接続する第4の右側接続部材(29)とを有することを特徴とするトルクセンサ。 - 請求項9に記載のトルクセンサにおいて、
基本平面(XY)上に、回転軸(Z)との交点(O)を通り45°ずつの角度偏差をもって交差する4直線(X,V,Y,W)を引いた場合に、第1の左側接続点(P16)および第3の左側接続点(P18)の正射影投影像が第1の直線(X)上に配置され、第1の右側接続点(P26)および第3の右側接続点(P28)の正射影投影像が第2の直線(V)上に配置され、第2の左側接続点(P17)および第4の左側接続点(P19)の正射影投影像が第3の直線(Y)上に配置され、第2の右側接続点(P27)および第4の右側接続点(P29)の正射影投影像が第4の直線(W)上に配置されていることを特徴とするトルクセンサ。 - 請求項9に記載のトルクセンサにおいて、
XYZ三次元座標系におけるZ軸まわりのトルクを検出するために、環状変形体(60)が原点Oを中心として基本平面となるXY平面上に配置され、左側支持体(10)がZ軸負領域に配置され、右側支持体(20)がZ軸正領域に配置され、
環状変形体(60)のZ軸負側の側面上に第1〜第4の左側接続点(P16〜P19)が設けられ、環状変形体(60)のZ軸正側の側面上に第1〜第4の右側接続点(P26〜P29)が設けられ、
XY平面上において、原点Oを中心としてX軸を反時計まわりに45°回転させた座標軸としてV軸を定義し、原点Oを中心としてY軸を反時計まわりに45°回転させた座標軸としてW軸を定義し、環状変形体(60)の両側面をXY平面上に投影して正射影投影像を得た場合に、第1の左側接続点(P16)の投影像が正のX軸上、第2の左側接続点(P17)の投影像が正のY軸上、第3の左側接続点(P18)の投影像が負のX軸上、第4の左側接続点(P19)の投影像が負のY軸上に配置されており、第1の右側接続点(P26)の投影像が正のV軸上、第2の右側接続点(P27)の投影像が正のW軸上、第3の右側接続点(P28)の投影像が負のV軸上、第4の右側接続点(P29)の投影像が負のW軸上に配置されており、
XY平面上において、原点Oを起点として、X軸正方向に対して反時計まわりに角度θをなす方位ベクトルVec(θ)を定義したときに、第i番目の検出点(1≦i≦8)が、方位ベクトルVec(π/8+(i−1)・π/4)と基本環状路(R)との交点位置に配置されていることを特徴とするトルクセンサ。 - 請求項2〜11のいずれかに記載のトルクセンサにおいて、
複数n個の検出部(D)のうち、一部は第1属性の検出部であり、他の一部は第2属性の検出部であり、
前記第1属性の検出部を構成する第1属性変位部(53;63)は、第1の回転方向のトルクが作用したときに右側支持体(20)から遠ざかる方向に変位し、前記第1の回転方向とは逆の第2の回転方向のトルクが作用したときに右側支持体(20)に近づく方向に変位し、
前記第2属性の検出部を構成する第2属性変位部(53;63)は、前記第1の回転方向のトルクが作用したときに右側支持体(20)に近づく方向に変位し、前記第2の回転方向のトルクが作用したときに右側支持体(20)から遠ざかる方向に変位し、
前記第1属性変位部(53;63)に固定された第1属性変位電極(E50)と、右側支持体(20)の前記第1属性変位電極(E50)に対向する位置に固定された第1属性固定電極(E20)と、によって第1属性容量素子(C)が構成され、
前記第2属性変位部(53;63)に固定された第2属性変位電極(E50)と、右側支持体(20)の前記第2属性変位電極(E50)に対向する位置に固定された第2属性固定電極(E20)と、によって第2属性容量素子(C)が構成され、
検出回路(101〜105)が、前記第1属性容量素子の静電容量値と、前記第2属性容量素子の静電容量値と、の差に相当する電気信号を、作用したトルクを示す電気信号として出力することを特徴とするトルクセンサ。 - 請求項1〜12のいずれかに記載のトルクセンサにおいて、
第1の変形部(51;61)、第2の変形部(52;62)、変位部(53;63)を有する検出部(D;D1〜D4;D11〜D18)が、一方の連結部端部(L)と他方の連結部端部(L)との間に配置されており、
前記第1の変形部(51;61)は、可撓性を有する第1の板状片によって構成され、前記第2の変形部(52;62)は、可撓性を有する第2の板状片によって構成され、前記変位部(53;63)は、第3の板状片によって構成され、
前記第1の板状片(51;61)の外側端は、前記一方の連結部端部(L)に接続され、前記第1の板状片(51;61)の内側端は、前記第3の板状片(53;63)の一端に接続され、前記第2の板状片(52;62)の外側端は、前記他方の連結部端部(L)に接続され、前記第2の板状片(52;62)の内側端は、前記第3の板状片(53;63)の他端に接続されていることを特徴とするトルクセンサ。 - 請求項13に記載のトルクセンサにおいて、
トルクが作用していない状態において、第3の板状片(53;63)と右側支持体(20)の対向面とが平行を維持することを特徴とするトルクセンサ。 - 請求項14に記載のトルクセンサにおいて、
検出点(Q)の位置に基本平面(XY)に直交する法線(N)を立てたときに、当該検出点(Q)に位置する検出部(D)を構成する第1の板状片(51)および第2の板状片(52)が、前記法線(N)に対して傾斜しており、かつ、第1の板状片(51)の傾斜方向と第2の板状片(52)の傾斜方向とが逆向きとなっていることを特徴とするトルクセンサ。 - 請求項1〜15のいずれかに記載のトルクセンサにおいて、
左側接続点(P11,P12)を通り回転軸(Z)に平行な接続参照線(A)を定義したときに、環状変形体(50)の連結部(L2,L4)の右側の側面と右側支持体(20)の対向面との間に、前記接続参照線(A)上もしくはその近傍に配置された補助接続部材(23,24)を更に設けたことを特徴とするトルクセンサ。 - 請求項16に記載のトルクセンサにおいて、
補助接続部材(23,24)として、接続参照線(A)に沿った方向に力が作用したときに比べて、接続参照線(A)に直交する方向に力が作用したときの方が、弾性変形を生じ易い部材を用いたことを特徴とするトルクセンサ。 - 請求項16または17に記載のトルクセンサにおいて、
環状変形体(50A)の補助接続部材(23A)に対する接続部分、もしくは、右側支持体(20A)の補助接続部材(23A)に対する接続部分、または、これら接続部分の双方を、ダイアフラム部(50d,20d)によって構成し、トルクの作用に基づく前記ダイアフラム部(50d,20d)の変形によって補助接続部材(23A)が接続参照線(A)に対して傾斜するようにしたことを特徴とするトルクセンサ。 - 請求項18に記載のトルクセンサにおいて、
環状変形体(50A)の補助接続部材(23A)に対する接続部分をダイアフラム部(50d)によって構成し、
左側接続部材(11A,11P)が、環状変形体(50A)の前記ダイアフラム部(50d)を避け、その周囲部分に接続されるようにしたことを特徴とするトルクセンサ。 - 請求項1〜19のいずれかに記載のトルクセンサにおいて、
左側支持体(10)および右側支持体(20)として、中心部に貫通開口部(H10,H20)を有する環状の構造体を用い、回転軸(Z)に沿って、左側支持体(10)、環状変形体(50)、右側支持体(20)の各貫通開口部(H10,H50,H20)を貫く挿通孔が確保されるようにしたことを特徴とするトルクセンサ。 - 請求項1〜20のいずれかに記載のトルクセンサにおいて、
環状変形体(50)が、回転軸(Z)を中心軸として配置された円盤の中央部に、より径の小さな同心円盤の形状をした貫通開口部(H50)を形成することにより得られる円環状の部材に対して、部分的な材料除去加工を施すことにより得られた部材であり、前記材料除去加工を施した部分によって検出部(D;D1〜D4;D11〜D18)が構成されていることを特徴とするトルクセンサ。 - 請求項1〜21のいずれかに記載のトルクセンサにおいて、
左側支持体(10)および右側支持体(20)が、回転軸(Z)を中心軸として配置された円盤の中央部に、より径の小さな同心円盤の形状をした貫通開口部(H10,H20)を形成することにより得られる円環状の部材からなることを特徴とするトルクセンサ。 - 請求項1〜22のいずれかに記載のトルクセンサにおいて、
左側接続部材(11,12)が、左側支持体(10)の右側面から右方に突出した凸状部によって構成され、右側接続部材(21,22)が、右側支持体(20)の左側面から左方に突出した凸状部によって構成され、各凸状部の頂面が環状変形体(50)の各接続点(Q1〜Q4)の位置に接合されていることを特徴とするトルクセンサ。 - 請求項1〜23のいずれかに記載のトルクセンサにおいて、
所定回転方向のトルクが作用した結果、固定電極(E20)に対する変位電極(E50)の相対位置が変化した場合にも、容量素子(C)を構成する一対の電極の実効対向面積が変化しないように、固定電極(E20)および変位電極(E50)のうちの一方の面積を他方の面積よりも大きく設定したことを特徴とするトルクセンサ。 - 請求項1〜24のいずれかに記載のトルクセンサにおいて、
左側支持体(10)、右側支持体(20)、環状変形体(50)が導電性材料により構成されており、変位電極(E50)が変位部(53)の表面に絶縁層(I50)を介して形成されており、固定電極(E20)が右側支持体(20)の表面に絶縁層(I20)を介して形成されていることを特徴とするトルクセンサ。 - 請求項1〜24のいずれかに記載のトルクセンサにおいて、
左側支持体(10)、右側支持体(20)、環状変形体(50)が導電性材料により構成されており、環状変形体(50)の表面の一部の領域によって変位電極(E50)を構成するか、もしくは、右側支持体(20)の表面の一部の領域によって固定電極(E20)を構成したことを特徴とするトルクセンサ。 - 所定の回転軸(Z)まわりのトルクを検出するトルクセンサであって、
前記回転軸(Z)に直交する基本平面(XY)上に、前記回転軸の周囲を取り囲むように基本環状路(R)を定義したときに、この基本環状路(R)に沿って伸びる環状変形体(50;60)と、
前記回転軸(Z)が左右に伸びる水平線をなすような基準観察方向から見たときに、前記環状変形体(50;60)の左側に隣接する位置に配置された作用支持体(10)と、 前記基準観察方向から見たときに、前記環状変形体(50;60)の右側に隣接する位置に配置された固定支持体(20)と、
前記環状変形体(50;60)の所定箇所に設けられた作用接続点(P11,P12;P16〜P19)を、前記作用支持体(10)に接続する作用接続部材(11,12;16〜19)と、
前記環状変形体(50;60)の所定箇所に設けられた固定接続点(P21,P22;P26〜P29)を、前記固定支持体(20)に接続する固定接続部材(21,22;26〜29)と、
前記環状変形体(50;60)の右側の側面の所定位置に固定された変位電極(E50)と、前記固定支持体(20)の前記変位電極(E50)に対向する位置に固定された固定電極(E20)と、によって構成される容量素子(C;C1〜C4;C11〜C18)と、
前記容量素子(C;C1〜C4;C11〜C18)の静電容量値の変動に基づいて、前記作用支持体(10)および前記固定支持体(20)の一方に負荷がかかった状態において他方に作用した前記回転軸(Z)まわりのトルクを示す電気信号を出力する検出回路(101〜105)と、
を備え、
前記環状変形体(50;60)は、前記基本環状路(R)上に定義された検出点(Q;Q1〜Q4;Q11〜Q18)に位置する検出部(D;D1〜D4;D11〜D18)と、この検出部の両端に接続された連結部(L;L1〜L4;L11〜L18)と、を有し、
前記検出部(D;D1〜D4;D11〜D18)は、検出対象となるトルクの作用により弾性変形を生じる第1の変形部(51;61)と、検出対象となるトルクの作用により弾性変形を生じる第2の変形部(52;62)と、前記第1の変形部および前記第2の変形部の弾性変形により変位を生じる変位部(53;63)と、を有し、
前記第1の変形部(51;61)の外側端はこれに隣接する連結部(L)に接続され、前記第1の変形部(51;61)の内側端は前記変位部(53;63)に接続され、前記第2の変形部(52;62)の外側端はこれに隣接する連結部(L)に接続され、前記第2の変形部(52;62)の内側端は前記変位部(53;63)に接続され、
前記変位電極(E50)は、前記変位部(53;63)の前記固定支持体(20)に対向する位置に固定され、
前記作用接続点(P11,P12;P16〜P19)および前記固定接続点(P21,P22;P26〜P29)は、前記連結部(L)に配置されており、前記基本平面(XY)への前記作用接続点(P11,P12;P16〜P19)の正射影投影像と前記基本平面(XY)への前記固定接続点(P21,P22;P26〜P29)の正射影投影像とは、互いに異なる位置に形成されることを特徴とするトルクセンサ。 - 所定の回転軸(Z)まわりのトルクを検出するトルクセンサであって、
前記回転軸(Z)に直交する基本平面(XY)上に、前記回転軸の周囲を取り囲むように基本環状路(R)を定義したときに、この基本環状路(R)に沿って伸びる環状変形体(50;60)と、
前記環状変形体(50;60)の外側もしくは内側に隣接する位置に配置された作用支持体(70;80)と、
前記回転軸(Z)が左右に伸びる水平線をなすような基準観察方向から見たときに、前記環状変形体(50;60)の右側に隣接する位置に配置された固定支持体(20)と、 前記環状変形体(50;60)の所定箇所に設けられた作用接続点(P71,P72;P81,P82)を、前記作用支持体(10)に接続する作用接続部材(71,72;81,82)と、
前記環状変形体(50;60)の所定箇所に設けられた固定接続点(P21,P22;P26〜P29)を、前記固定支持体(20)に接続する固定接続部材(21,22;26〜29)と、
前記環状変形体(50;60)の右側の側面の所定位置に固定された変位電極(E50)と、前記固定支持体(20)の前記変位電極(E50)に対向する位置に固定された固定電極(E20)と、によって構成される容量素子(C;C1〜C4;C11〜C18)と、
前記容量素子(C;C1〜C4;C11〜C18)の静電容量値の変動に基づいて、前記作用支持体(10)および前記固定支持体(20)の一方に負荷がかかった状態において他方に作用した前記回転軸(Z)まわりのトルクを示す電気信号を出力する検出回路(101〜105)と、
を備え、
前記環状変形体(50;60)は、前記基本環状路(R)上に定義された検出点(Q;Q1〜Q4;Q11〜Q18)に位置する検出部(D;D1〜D4;D11〜D18)と、この検出部の両端に接続された連結部(L;L1〜L4;L11〜L18)と、を有し、
前記検出部(D;D1〜D4;D11〜D18)は、検出対象となるトルクの作用により弾性変形を生じる第1の変形部(51;61)と、検出対象となるトルクの作用により弾性変形を生じる第2の変形部(52;62)と、前記第1の変形部および前記第2の変形部の弾性変形により変位を生じる変位部(53;63)と、を有し、
前記第1の変形部(51;61)の外側端はこれに隣接する連結部(L)に接続され、前記第1の変形部(51;61)の内側端は前記変位部(53;63)に接続され、前記第2の変形部(52;62)の外側端はこれに隣接する連結部(L)に接続され、前記第2の変形部(52;62)の内側端は前記変位部(53;63)に接続され、
前記変位電極(E50)は、前記変位部(53;63)の前記固定支持体(20)に対向する位置に固定され、
前記作用接続点(P71,P72;P81,P82)および前記固定接続点(P21,P22;P26〜P29)は、前記連結部(L)に配置されており、前記基本平面(XY)への前記作用接続点(P71,P72;P81,P82)の正射影投影像と前記基本平面(XY)への前記固定接続点(P21,P22;P26〜P29)の正射影投影像とは、互いに異なる位置に形成されることを特徴とするトルクセンサ。 - 請求項27または28に記載のトルクセンサにおいて、
基本環状路(R)上に複数n個(n≧2)の検出点(Q;Q1〜Q4;Q11〜Q18)が定義され、各検出点にそれぞれ検出部(D;D1〜D4;D11〜D18)が位置しており、環状変形体(50;60)が、n個の検出部(D;D1〜D4;D11〜D18)とn個の連結部(L;L1〜L4;L11〜L18)とを、基本環状路(R)に沿って交互に配置することにより構成されていることを特徴とするトルクセンサ。 - 請求項29に記載のトルクセンサにおいて、
基本環状路(R)上に偶数n個(n≧2)の検出点(Q;Q1〜Q4;Q11〜Q18)が定義され、各検出点にそれぞれ検出部(D;D1〜D4;D11〜D18)が位置しており、環状変形体(50;60)が、n個の検出部(D;D1〜D4;D11〜D18)とn個の連結部(L;L1〜L4;L11〜L18)とを、基本環状路(R)に沿って交互に配置することにより構成されていることを特徴とするトルクセンサ。 - 請求項30に記載のトルクセンサにおいて、
偶数n個の連結部(L;L1〜L4;L11〜L18)に対して、基本環状路(R)に沿って順に番号を付与したときに、固定接続点(P21,P22;P26〜P29)が奇数番目の連結部に配置され、作用接続点(P11,P12;P16〜P19)が偶数番目の連結部に配置されていることを特徴とするトルクセンサ。 - 請求項31に記載のトルクセンサにおいて、
n=2に設定することにより、基本環状路(R)に沿って、第1の連結部(L1)、第1の検出部(D1)、第2の連結部(L2)、第2の検出部(D2)を、この順序で配置することにより環状変形体が構成されており、固定接続点(P21)が第1の連結部(L1)に配置され、作用接続点(P11)が第2の連結部(L2)に配置されていることを特徴とするトルクセンサ。 - 請求項31に記載のトルクセンサにおいて、
n=4に設定することにより、基本環状路(R)に沿って、第1の連結部(L1)、第1の検出部(D1)、第2の連結部(L2)、第2の検出部(D2)、第3の連結部(L3)、第3の検出部(D3)、第4の連結部(L4)、第4の検出部(D4)を、この順序で配置することにより環状変形体(50)が構成されており、第1の固定接続点(P21)が第1の連結部(L1)に配置され、第1の作用接続点(P11)が第2の連結部(L2)に配置され、第2の固定接続点(P22)が第3の連結部(L3)に配置され、第2の作用接続点(P12)が第4の連結部(L4)に配置され、
作用接続部材(11,12)が、前記第1の作用接続点(P11)と作用支持体(10)とを接続する第1の作用接続部材(11)と、前記第2の作用接続点(P12)と作用支持体(10)とを接続する第2の作用接続部材(12)とを有し、
固定接続部材(21,22)が、前記第1の固定接続点(P21)と固定支持体(20)とを接続する第1の固定接続部材(21)と、前記第2の固定接続点(P22)と固定支持体(20)とを接続する第2の固定接続部材(22)とを有することを特徴とするトルクセンサ。 - 請求項33に記載のトルクセンサにおいて、
基本平面上(XY)に、回転軸(Z)との交点(O)を通り互いに直交する2直線(X,Y)を引いた場合に、第1の作用接続点(P11)および第2の作用接続点(P12)の正射影投影像が第1の直線上(Y)に配置され、第1の固定接続点(P21)および第2の固定接続点(P22)の正射影投影像が第2の直線上(X)に配置されていることを特徴とするトルクセンサ。 - 請求項33に記載のトルクセンサにおいて、
XYZ三次元座標系におけるZ軸まわりのトルクを検出するために、環状変形体(50)が原点Oを中心として基本平面となるXY平面上に配置され、作用支持体(10)がZ軸負領域に配置され、固定支持体(20)がZ軸正領域に配置され、
環状変形体(50)のZ軸負側の側面上に第1の作用接続点(P11)および第2の作用接続点(P12)が設けられ、環状変形体(50)のZ軸正側の側面上に第1の固定接続点(P21)および第2の固定接続点(P22)が設けられ、
環状変形体(50)の両側面をXY平面上に投影して正射影投影像を得た場合に、第1の固定接続点(P21)の投影像が正のX軸上、第2の固定接続点(P22)の投影像が負のX軸上、第1の作用接続点(P11)の投影像が正のY軸上、第2の作用接続点(P12)の投影像が負のY軸上に配置されており、
XY平面上において、原点Oを中心としてX軸を反時計まわりに45°回転させた座標軸としてV軸を定義し、原点Oを中心としてY軸を反時計まわりに45°回転させた座標軸としてW軸を定義した場合に、第1の検出点(Q1)が正のV軸上、第2の検出点(Q2)が正のW軸上、第3の検出点(Q3)が負のV軸上、第4の検出点(Q4)が負のW軸上に配置されていることを特徴とするトルクセンサ。 - 請求項31に記載のトルクセンサにおいて、
n=8に設定することにより、基本環状路(R)に沿って、第1の連結部(L11)、第1の検出部(D11)、第2の連結部(L12)、第2の検出部(D12)、第3の連結部(L13)、第3の検出部(D13)、第4の連結部(L14)、第4の検出部(D14)、第5の連結部(L15)、第5の検出部(D15)、第6の連結部(L16)、第6の検出部(D16)、第7の連結部(L17)、第7の検出部(D17)、第8の連結部(L18)、第8の検出部(D18)を、この順序で配置することにより環状変形体(60)が構成されており、第1の作用接続点(P16)が第1の連結部(L11)に配置され、第1の固定接続点(P26)が第2の連結部(L12)に配置され、第2の作用接続点(P17)が第3の連結部(L13)に配置され、第2の固定接続点(P27)が第4の連結部(L14)に配置され、第3の作用接続点(P18)が第5の連結部(L15)に配置され、第3の固定接続点(P28)が第6の連結部(L16)に配置され、第4の作用接続点(P19)が第7の連結部(L17)に配置され、第4の固定接続点(P29)が第8の連結部(L18)に配置され、
作用接続部材(16〜19)が、前記第1の作用接続点(P16)と作用支持体(10)とを接続する第1の作用接続部材(16)と、前記第2の作用接続点(P17)と作用支持体(10)とを接続する第2の作用接続部材(17)と、前記第3の作用接続点(P18)と作用支持体(10)とを接続する第3の作用接続部材(18)と、前記第4の作用接続点(P19)と作用支持体(10)とを接続する第4の作用接続部材(19)とを有し、
固定接続部材(26〜29)が、前記第1の固定接続点(P26)と固定支持体(20)とを接続する第1の固定接続部材(26)と、前記第2の固定接続点(P27)と固定支持体(20)とを接続する第2の固定接続部材(27)と、前記第3の固定接続点(P28)と固定支持体(20)とを接続する第3の固定接続部材(28)と、前記第4の固定接続点(P29)と固定支持体(20)とを接続する第4の固定接続部材(29)とを有することを特徴とするトルクセンサ。 - 請求項36に記載のトルクセンサにおいて、
基本平面(XY)上に、回転軸(Z)との交点(O)を通り45°ずつの角度偏差をもって交差する4直線(X,V,Y,W)を引いた場合に、第1の作用接続点(P16)および第3の作用接続点(P18)の正射影投影像が第1の直線(X)上に配置され、第1の固定接続点(P26)および第3の固定接続点(P28)の正射影投影像が第2の直線(V)上に配置され、第2の作用接続点(P17)および第4の作用接続点(P19)の正射影投影像が第3の直線(Y)上に配置され、第2の固定接続点(P27)および第4の固定接続点(P29)の正射影投影像が第4の直線(W)上に配置されていることを特徴とするトルクセンサ。 - 請求項36記載のトルクセンサにおいて、
XYZ三次元座標系におけるZ軸まわりのトルクを検出するために、環状変形体(60)が原点Oを中心として基本平面となるXY平面上に配置され、作用支持体(10)がZ軸負領域に配置され、固定支持体(20)がZ軸正領域に配置され、
環状変形体(60)のZ軸負側の側面上に第1〜第4の作用接続点(P16〜P19)が設けられ、環状変形体(60)のZ軸正側の側面上に第1〜第4の固定接続点(P26〜P29)が設けられ、
XY平面上において、原点Oを中心としてX軸を反時計まわりに45°回転させた座標軸としてV軸を定義し、原点Oを中心としてY軸を反時計まわりに45°回転させた座標軸としてW軸を定義し、環状変形体(60)の両側面をXY平面上に投影して正射影投影像を得た場合に、第1の作用接続点(P16)の投影像が正のX軸上、第2の作用接続点(P17)の投影像が正のY軸上、第3の作用接続点(P18)の投影像が負のX軸上、第4の作用接続点(P19)の投影像が負のY軸上に配置されており、第1の固定接続点(P26)の投影像が正のV軸上、第2の固定接続点(P27)の投影像が正のW軸上、第3の固定接続点(P28)の投影像が負のV軸上、第4の固定接続点(P29)の投影像が負のW軸上に配置されており、
XY平面上において、原点Oを起点として、X軸正方向に対して反時計まわりに角度θをなす方位ベクトルVec(θ)を定義したときに、第i番目の検出点(1≦i≦8)が、方位ベクトルVec(π/8+(i−1)・π/4)と基本環状路(R)との交点位置に配置されていることを特徴とするトルクセンサ。 - 請求項29〜38のいずれかに記載のトルクセンサにおいて、
複数n個の検出部(D)のうち、一部は第1属性の検出部であり、他の一部は第2属性の検出部であり、
前記第1属性の検出部を構成する第1属性変位部(53;63)は、第1の回転方向のトルクが作用したときに固定支持体(20)から遠ざかる方向に変位し、前記第1の回転方向とは逆の第2の回転方向のトルクが作用したときに固定支持体(20)に近づく方向に変位し、
前記第2属性の検出部を構成する第2属性変位部(53;63)は、前記第1の回転方向のトルクが作用したときに固定支持体(20)に近づく方向に変位し、前記第2の回転方向のトルクが作用したときに固定支持体(20)から遠ざかる方向に変位し、
前記第1属性変位部(53;63)に固定された第1属性変位電極(E50)と、固定支持体(20)の前記第1属性変位電極(E50)に対向する位置に固定された第1属性固定電極(E20)と、によって第1属性容量素子(C)が構成され、
前記第2属性変位部(53;63)に固定された第2属性変位電極(E50)と、固定支持体(20)の前記第2属性変位電極(E50)に対向する位置に固定された第2属性固定電極(E20)と、によって第2属性容量素子(C)が構成され、
検出回路(101〜105)が、前記第1属性容量素子の静電容量値と、前記第2属性容量素子の静電容量値と、の差に相当する電気信号を、作用したトルクを示す電気信号として出力することを特徴とするトルクセンサ。 - 請求項27〜39のいずれかに記載のトルクセンサにおいて、
第1の変形部(51;61)、第2の変形部(52;62)、変位部(53;63)を有する検出部(D;D1〜D4;D11〜D18)が、一方の連結部端部(L)と他方の連結部端部(L)との間に配置されており、
前記第1の変形部(51;61)は、可撓性を有する第1の板状片によって構成され、前記第2の変形部(52;62)は、可撓性を有する第2の板状片によって構成され、前記変位部(53;63)は、第3の板状片によって構成され、
前記第1の板状片(51;61)の外側端は、前記一方の連結部端部(L)に接続され、前記第1の板状片(51;61)の内側端は、前記第3の板状片(53;63)の一端に接続され、前記第2の板状片(52;62)の外側端は、前記他方の連結部端部(L)に接続され、前記第2の板状片(52;62)の内側端は、前記第3の板状片(53;63)の他端に接続されていることを特徴とするトルクセンサ。 - 請求項40に記載のトルクセンサにおいて、
トルクが作用していない状態において、第3の板状片(53;63)と固定支持体(20)の対向面とが平行を維持することを特徴とするトルクセンサ。 - 請求項41に記載のトルクセンサにおいて、
検出点(Q)の位置に基本平面(XY)に直交する法線(N)を立てたときに、当該検出点(Q)に位置する検出部(D)を構成する第1の板状片(51)および第2の板状片(52)が、前記法線(N)に対して傾斜しており、かつ、第1の板状片(51)の傾斜方向と第2の板状片(52)の傾斜方向とが逆向きとなっていることを特徴とするトルクセンサ。 - 請求項27〜42のいずれかに記載のトルクセンサにおいて、
作用接続点(P11,P12)を通り回転軸(Z)に平行な接続参照線(A)を定義したときに、環状変形体(50)の連結部(L2,L4)の固定の側面と固定支持体(20)の対向面との間に、前記接続参照線(A)上もしくはその近傍に配置された補助接続部材(23,24)を更に設けたことを特徴とするトルクセンサ。 - 請求項43に記載のトルクセンサにおいて、
補助接続部材(23,24)として、接続参照線(A)に沿った方向に力が作用したときに比べて、接続参照線(A)に直交する方向に力が作用したときの方が、弾性変形を生じ易い部材を用いたことを特徴とするトルクセンサ。 - 請求項43または44に記載のトルクセンサにおいて、
環状変形体(50A)の補助接続部材(23A)に対する接続部分、もしくは、固定支持体(20A)の補助接続部材(23A)に対する接続部分、または、これら接続部分の双方を、ダイアフラム部(50d,20d)によって構成し、トルクの作用に基づく前記ダイアフラム部(50d,20d)の変形によって補助接続部材(23A)が接続参照線(A)に対して傾斜するようにしたことを特徴とするトルクセンサ。 - 請求項45に記載のトルクセンサにおいて、
環状変形体(50A)の補助接続部材(23A)に対する接続部分をダイアフラム部(50d)によって構成し、
作用接続部材(11A,11P)が、環状変形体(50A)の前記ダイアフラム部(50d)を避け、その周囲部分に接続されるようにしたことを特徴とするトルクセンサ。 - 請求項27〜46のいずれかに記載のトルクセンサにおいて、
作用支持体(10)および固定支持体(20)として、中心部に貫通開口部(H10,H20)を有する環状の構造体を用い、回転軸(Z)に沿って、作用支持体(10)、環状変形体(50)、固定支持体(20)の各貫通開口部(H10,H50,H20)を貫く挿通孔が確保されるようにしたことを特徴とするトルクセンサ。 - 請求項27〜47のいずれかに記載のトルクセンサにおいて、
環状変形体(50)が、回転軸(Z)を中心軸として配置された円盤の中央部に、より径の小さな同心円盤の形状をした貫通開口部(H50)を形成することにより得られる円環状の部材に対して、部分的な材料除去加工を施すことにより得られた部材であり、前記材料除去加工を施した部分によって検出部(D;D1〜D4;D11〜D18)が構成されていることを特徴とするトルクセンサ。 - 請求項27〜48のいずれかに記載のトルクセンサにおいて、
作用支持体(10)および固定支持体(20)が、回転軸(Z)を中心軸として配置された円盤の中央部に、より径の小さな同心円盤の形状をした貫通開口部(H10,H20)を形成することにより得られる円環状の部材からなることを特徴とするトルクセンサ。 - 請求項27〜49のいずれかに記載のトルクセンサにおいて、
作用接続部材(11,12)が、作用支持体(10)の固定面から右方に突出した凸状部によって構成され、固定接続部材(21,22)が、固定支持体(20)の作用面から左方に突出した凸状部によって構成され、各凸状部の頂面が環状変形体(50)の各接続点(Q1〜Q4)の位置に接合されていることを特徴とするトルクセンサ。 - 請求項27〜50のいずれかに記載のトルクセンサにおいて、
所定回転方向のトルクが作用した結果、固定電極(E20)に対する変位電極(E50)の相対位置が変化した場合にも、容量素子(C)を構成する一対の電極の実効対向面積が変化しないように、固定電極(E20)および変位電極(E50)のうちの一方の面積を他方の面積よりも大きく設定したことを特徴とするトルクセンサ。 - 請求項27〜51のいずれかに記載のトルクセンサにおいて、
作用支持体(10)、固定支持体(20)、環状変形体(50)が導電性材料により構成されており、変位電極(E50)が変位部(53)の表面に絶縁層(I50)を介して形成されており、固定電極(E20)が固定支持体(20)の表面に絶縁層(I20)を介して形成されていることを特徴とするトルクセンサ。 - 請求項27〜51のいずれかに記載のトルクセンサにおいて、
作用支持体(10)、固定支持体(20)、環状変形体(50)が導電性材料により構成されており、環状変形体(50)の表面の一部の領域によって変位電極(E50)を構成するか、もしくは、固定支持体(20)の表面の一部の領域によって固定電極(E20)を構成したことを特徴とするトルクセンサ。 - 所定の回転軸(Z)まわりのトルクを検出するトルクセンサであって、
前記回転軸(Z)に直交する基本平面(XY)上に、前記回転軸の周囲を取り囲むように基本環状路(R)を定義したときに、この基本環状路(R)に沿って伸びる環状変形体(40;50;60;90)と、
前記環状変形体(40;50;60;90)にトルクを作用させる作用支持体(10;70;80)と、
前記環状変形体(40;50;60;90)を固定する固定支持体(20;120)と、
前記環状変形体(40;50;60;90)の所定箇所に設けられた作用接続点(P71,P72;P81,P82)を、前記作用支持体(10;70;80)に接続する作用接続部材(71〜74;76〜79;81,82;86〜89)と、
前記環状変形体(40;50;60;90)の所定箇所に設けられた固定接続点(P21,P22;P26〜P29)を、前記固定支持体(20;120)に接続する固定接続部材(21,22;26〜29;121,122)と、
前記環状変形体(40;50;60;90)に生じた弾性変形を検出する検出素子(C;C1〜C4;C11〜C18;r1〜r4)と、
前記検出素子(C;C1〜C4;C11〜C18;r1〜r4)の検出結果に基づいて、前記作用支持体(10;70;80)および前記固定支持体(20;120)の一方に負荷がかかった状態において他方に作用した前記回転軸(Z)まわりのトルクを示す電気信号を出力する検出回路(101〜105;108)と、
を備え、
前記環状変形体(40;50;60;90)は、前記基本環状路(R)上に定義された検出点(Q;Q1〜Q4;Q11〜Q18)に位置する検出部(D;DB;DC;DD;D1〜D4;D1’〜D4’;D11〜D18;D11S〜D18S)と、この検出部の両端に接続された連結部(L;L1〜L4;L11〜L18)と、を有し、
前記作用接続点(P71,P72;P81,P82)および前記固定接続点(P21,P22;P26〜P29)は、前記連結部(L;L1〜L4;L11〜L18)に配置されており、前記基本平面(XY)への前記作用接続点(P71,P72;P81,P82)の正射影投影像と前記基本平面(XY)への前記固定接続点(P21,P22;P26〜P29)の正射影投影像とは、互いに異なる位置に形成されており、
前記検出部(D;DB;DC;DD;D1〜D4;D1’〜D4’;D11〜D18;D11S〜D18S)は、前記作用接続点と前記固定接続点との間に力が作用したときに、作用した力に基づいて弾性変形を生じる弾性変形構造部を有し、前記検出素子(C;C1〜C4;C11〜C18;r1〜r4)は、前記弾性変形構造部に生じた弾性変形を検出するようになっており、
検出部(DD)が、検出対象となるトルクの作用により弾性変形を生じる板状変形部(41)を有し、前記板状変形部(41)はその板面が基本環状路(R)に対して傾斜するように配置されており、
検出素子が、検出部(DD)の弾性変形を生じる位置に固定されたストレインゲージ(r1〜r4)によって構成されており、
検出回路(108)が、前記ストレインゲージ(r1〜r4)の電気抵抗の変動に基づいて、作用したトルクを示す電気信号を出力するようになっており、
検出素子が、板状変形部(41)の連結部(L)に対する接続端近傍の少なくとも一方の面に配置されたストレインゲージ(r1〜r4)によって構成されている
ことを特徴とするトルクセンサ。 - 請求項54に記載のトルクセンサにおいて、
検出素子が、連結部(L)に対する第1の接続端近傍の表側の面および/または裏側の面にそれぞれ配置された第1のストレインゲージ(r1)および第2のストレインゲージ(r2)と、連結部(L)に対する第2の接続端近傍の表側の面および/または裏側の面にそれぞれ配置された第3のストレインゲージ(r3)および第4のストレインゲージ(r4)と、を有し、
検出回路が、前記第1のストレインゲージ(r1)と前記第4のストレインゲージ(r4)とを第1の対辺とし、前記第2のストレインゲージ(r2)と前記第3のストレインゲージ(r3)とを第2の対辺とするブリッジ回路(108)のブリッジ電圧を検出することを特徴とするトルクセンサ。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2015/052783 WO2016121128A1 (ja) | 2015-01-26 | 2015-01-26 | トルクセンサ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2016121128A1 JPWO2016121128A1 (ja) | 2017-10-19 |
| JP6270186B2 true JP6270186B2 (ja) | 2018-01-31 |
Family
ID=56542774
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016571656A Active JP6270186B2 (ja) | 2015-01-26 | 2015-01-26 | トルクセンサ |
Country Status (5)
| Country | Link |
|---|---|
| US (3) | US10557764B2 (ja) |
| EP (1) | EP3287756B1 (ja) |
| JP (1) | JP6270186B2 (ja) |
| CN (2) | CN107941395B (ja) |
| WO (1) | WO2016121128A1 (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6339304B1 (ja) * | 2018-02-06 | 2018-06-06 | 株式会社トライフォース・マネジメント | 力覚センサ装置 |
| JP2018200259A (ja) * | 2017-05-29 | 2018-12-20 | 株式会社トライフォース・マネジメント | トルクセンサ |
| JP2019174477A (ja) * | 2019-05-09 | 2019-10-10 | 株式会社トライフォース・マネジメント | トルクセンサ |
| KR102235970B1 (ko) * | 2019-10-11 | 2021-04-02 | 두산로보틱스 주식회사 | 정전용량형 토크센서 |
| JP7105010B2 (ja) | 2019-05-09 | 2022-07-22 | 株式会社トライフォース・マネジメント | トルクセンサ |
| JP2022121738A (ja) * | 2021-11-04 | 2022-08-19 | 株式会社トライフォース・マネジメント | トルクセンサ |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6270186B2 (ja) * | 2015-01-26 | 2018-01-31 | 株式会社トライフォース・マネジメント | トルクセンサ |
| WO2017208350A1 (ja) * | 2016-05-31 | 2017-12-07 | 株式会社 トライフォース・マネジメント | トルクセンサ |
| JP6501746B2 (ja) * | 2016-10-07 | 2019-04-17 | キヤノン株式会社 | 変位測定装置、ロボット、ロボットアーム及び物品の製造方法 |
| WO2018163255A1 (ja) * | 2017-03-06 | 2018-09-13 | 株式会社 トライフォース・マネジメント | 力覚センサ |
| JP6617251B1 (ja) * | 2018-01-09 | 2019-12-11 | 株式会社トライフォース・マネジメント | 力覚センサ |
| JP6968739B2 (ja) | 2018-03-29 | 2021-11-17 | 日本電産コパル電子株式会社 | トルクセンサ |
| JP6910990B2 (ja) * | 2018-07-02 | 2021-07-28 | 日本電産コパル電子株式会社 | トルクセンサの支持装置 |
| JP2020012660A (ja) | 2018-07-13 | 2020-01-23 | 日本電産コパル電子株式会社 | トルクセンサ |
| CN109141718B (zh) * | 2018-08-31 | 2020-04-14 | 东北电力大学 | 二维无线无源拉扭复合力传感器 |
| US11618163B2 (en) * | 2018-12-27 | 2023-04-04 | Fanuc Corporation | Industrial robot system |
| CN109781321B (zh) * | 2019-01-29 | 2021-03-23 | 西安交通大学 | 一种裂筒式扭矩传感器 |
Family Cites Families (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4094192A (en) * | 1976-09-20 | 1978-06-13 | The Charles Stark Draper Laboratory, Inc. | Method and apparatus for six degree of freedom force sensing |
| JPS55167138U (ja) * | 1979-05-21 | 1980-12-01 | ||
| JPH067073B2 (ja) * | 1986-04-21 | 1994-01-26 | 株式会社日立製作所 | トルク検出方法及びその検出装置 |
| JPH0641892B2 (ja) | 1986-09-19 | 1994-06-01 | 洋太郎 畑村 | 荷重検出器 |
| JP3177790B2 (ja) | 1992-05-14 | 2001-06-18 | ニッタ株式会社 | 力及びモーメント検出用の起歪体 |
| DE19514916A1 (de) * | 1995-04-22 | 1996-10-24 | Gassmann Theiss Messtech | Vorrichtung zur Kraftmessung mittels eines elektromechanischen Kraftaufnehmers |
| JP2000019035A (ja) | 1998-07-02 | 2000-01-21 | Koyo Seiko Co Ltd | トルクセンサ |
| FR2790830B1 (fr) * | 1999-03-11 | 2004-08-27 | Nicolas Hamburger | Extensometre miniature de faible raideur |
| US6442812B1 (en) * | 2000-03-02 | 2002-09-03 | Eaton Corporation | Method of manufacturing a piezoelectric torque sensor |
| US6772646B1 (en) | 2001-07-11 | 2004-08-10 | Bei Sensors & Systems Company, Inc. | Differential capacitive torque sensor |
| JP2005106679A (ja) * | 2003-09-30 | 2005-04-21 | Nitta Ind Corp | 多軸センサユニットおよびこれを利用した多軸センサ |
| CN1914583A (zh) * | 2004-02-03 | 2007-02-14 | 诺基亚公司 | 用于在移动终端设备中实现振动输出命令的方法和设备 |
| JP2006292423A (ja) | 2005-04-06 | 2006-10-26 | Hitachi Cable Ltd | 回転角度センサ及びこれを用いたトルクセンサ、操舵角センサ、ステアリング装置並びにパワーステアリング装置 |
| JP2007024641A (ja) | 2005-07-14 | 2007-02-01 | Honda Motor Co Ltd | 磁歪式トルクセンサおよび磁歪式トルクセンサの磁歪膜の形成方法 |
| FR2909760B1 (fr) | 2006-12-07 | 2009-05-08 | Peugeot Citroen Automobiles Sa | Dispositif de mesure d'un couple de torsion et ensemble forme d'un arbre tournant et d'un dispositif de mesure du couple de torsion |
| JP5606662B2 (ja) | 2007-08-31 | 2014-10-15 | 哲也 毛利 | トルクセンサ及びトルクセンサ付モータ |
| JP2009210441A (ja) | 2008-03-04 | 2009-09-17 | Niigata Univ | 六分力センサ |
| JP5191774B2 (ja) | 2008-03-31 | 2013-05-08 | カヤバ工業株式会社 | トルクセンサ及びその製造方法 |
| JP5439068B2 (ja) * | 2009-07-08 | 2014-03-12 | 株式会社ワコー | 力検出装置 |
| JP5510133B2 (ja) | 2010-07-07 | 2014-06-04 | パナソニック株式会社 | 超音波式ガスメータ |
| JP4948630B2 (ja) * | 2010-08-05 | 2012-06-06 | 株式会社トライフォース・マネジメント | トルクセンサ |
| JP4963134B2 (ja) * | 2010-11-25 | 2012-06-27 | 株式会社トライフォース・マネジメント | トルクセンサ |
| CN103430000B (zh) * | 2011-07-27 | 2015-06-24 | 三角力量管理株式会社 | 力传感器 |
| JP2013064706A (ja) * | 2011-09-20 | 2013-04-11 | Kazuhiro Nakamura | センサ |
| CN103207039B (zh) * | 2012-10-29 | 2015-04-22 | 电子科技大学 | 一种利用磁路的转矩传感器 |
| CN104272073B (zh) * | 2013-07-17 | 2016-06-22 | 株式会社和广 | 力传感器 |
| JP6053247B1 (ja) * | 2015-01-26 | 2016-12-27 | 株式会社ワコーテック | 力覚センサ |
| JP6270186B2 (ja) * | 2015-01-26 | 2018-01-31 | 株式会社トライフォース・マネジメント | トルクセンサ |
| JP6092326B2 (ja) * | 2015-07-29 | 2017-03-08 | 株式会社トライフォース・マネジメント | トルクセンサ |
| WO2017208350A1 (ja) * | 2016-05-31 | 2017-12-07 | 株式会社 トライフォース・マネジメント | トルクセンサ |
-
2015
- 2015-01-26 JP JP2016571656A patent/JP6270186B2/ja active Active
- 2015-01-26 CN CN201810034314.1A patent/CN107941395B/zh not_active Expired - Fee Related
- 2015-01-26 CN CN201580078242.5A patent/CN107407607B/zh not_active Expired - Fee Related
- 2015-01-26 WO PCT/JP2015/052783 patent/WO2016121128A1/ja active Application Filing
- 2015-01-26 US US15/546,605 patent/US10557764B2/en not_active Expired - Fee Related
- 2015-01-26 EP EP15880023.5A patent/EP3287756B1/en active Active
-
2019
- 2019-07-01 US US16/459,352 patent/US11118987B2/en active Active
-
2021
- 2021-08-16 US US17/402,829 patent/US11703402B2/en active Active
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018200259A (ja) * | 2017-05-29 | 2018-12-20 | 株式会社トライフォース・マネジメント | トルクセンサ |
| JP6339304B1 (ja) * | 2018-02-06 | 2018-06-06 | 株式会社トライフォース・マネジメント | 力覚センサ装置 |
| JP2019138650A (ja) * | 2018-02-06 | 2019-08-22 | 株式会社トライフォース・マネジメント | 力覚センサ装置 |
| JP2019174477A (ja) * | 2019-05-09 | 2019-10-10 | 株式会社トライフォース・マネジメント | トルクセンサ |
| JP2021096267A (ja) * | 2019-05-09 | 2021-06-24 | 株式会社トライフォース・マネジメント | トルクセンサ |
| JP7105010B2 (ja) | 2019-05-09 | 2022-07-22 | 株式会社トライフォース・マネジメント | トルクセンサ |
| KR102235970B1 (ko) * | 2019-10-11 | 2021-04-02 | 두산로보틱스 주식회사 | 정전용량형 토크센서 |
| JP2022121738A (ja) * | 2021-11-04 | 2022-08-19 | 株式会社トライフォース・マネジメント | トルクセンサ |
| JP7152096B2 (ja) | 2021-11-04 | 2022-10-12 | 株式会社トライフォース・マネジメント | トルクセンサ |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3287756A4 (en) | 2019-01-30 |
| CN107941395A (zh) | 2018-04-20 |
| US11118987B2 (en) | 2021-09-14 |
| EP3287756B1 (en) | 2020-03-04 |
| JPWO2016121128A1 (ja) | 2017-10-19 |
| CN107407607A (zh) | 2017-11-28 |
| US20180017452A1 (en) | 2018-01-18 |
| US20200003640A1 (en) | 2020-01-02 |
| CN107407607B (zh) | 2020-10-09 |
| CN107941395B (zh) | 2020-10-09 |
| US10557764B2 (en) | 2020-02-11 |
| US11703402B2 (en) | 2023-07-18 |
| WO2016121128A1 (ja) | 2016-08-04 |
| US20220107231A1 (en) | 2022-04-07 |
| EP3287756A1 (en) | 2018-02-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6270186B2 (ja) | トルクセンサ | |
| JP6053247B1 (ja) | 力覚センサ | |
| JP6100448B1 (ja) | トルクセンサ | |
| JP4948630B2 (ja) | トルクセンサ | |
| JP4963138B1 (ja) | 力覚センサ | |
| JP5667723B1 (ja) | 力覚センサ | |
| JP2017032301A (ja) | トルクセンサ | |
| JP6505273B2 (ja) | 力覚センサ | |
| JP6713151B2 (ja) | 力覚センサ | |
| JP6293246B2 (ja) | 力覚センサ | |
| US10775250B2 (en) | Torque sensor | |
| JP2021135104A (ja) | 力覚センサ | |
| JP6865982B2 (ja) | 力覚センサ | |
| JP6910693B2 (ja) | 力覚センサ | |
| JP6887711B1 (ja) | 力覚センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170830 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170830 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20170830 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20170914 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170919 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171004 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20171124 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6270186 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |