JP6261230B2 - 筆圧検出モジュール及び位置指示器 - Google Patents
筆圧検出モジュール及び位置指示器 Download PDFInfo
- Publication number
- JP6261230B2 JP6261230B2 JP2013161916A JP2013161916A JP6261230B2 JP 6261230 B2 JP6261230 B2 JP 6261230B2 JP 2013161916 A JP2013161916 A JP 2013161916A JP 2013161916 A JP2013161916 A JP 2013161916A JP 6261230 B2 JP6261230 B2 JP 6261230B2
- Authority
- JP
- Japan
- Prior art keywords
- pressure
- holder
- electrode
- sensing device
- detection module
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001514 detection method Methods 0.000 title claims description 142
- 239000004065 semiconductor Substances 0.000 claims description 70
- 230000005540 biological transmission Effects 0.000 claims description 42
- 230000008859 change Effects 0.000 claims description 18
- 230000002093 peripheral effect Effects 0.000 claims description 11
- 238000006073 displacement reaction Methods 0.000 claims description 8
- 230000005674 electromagnetic induction Effects 0.000 claims description 5
- 230000004044 response Effects 0.000 claims description 5
- 238000003825 pressing Methods 0.000 description 49
- 238000003860 storage Methods 0.000 description 36
- 239000003990 capacitor Substances 0.000 description 32
- 239000002184 metal Substances 0.000 description 30
- 239000000758 substrate Substances 0.000 description 29
- 229910000859 α-Fe Inorganic materials 0.000 description 28
- 229920005989 resin Polymers 0.000 description 18
- 239000011347 resin Substances 0.000 description 18
- 230000007246 mechanism Effects 0.000 description 17
- 238000005476 soldering Methods 0.000 description 16
- 230000004048 modification Effects 0.000 description 9
- 238000012986 modification Methods 0.000 description 9
- 238000006243 chemical reaction Methods 0.000 description 7
- 210000000078 claw Anatomy 0.000 description 6
- 238000010586 diagram Methods 0.000 description 6
- 238000004519 manufacturing process Methods 0.000 description 6
- 230000001360 synchronised effect Effects 0.000 description 5
- 229930040373 Paraformaldehyde Natural products 0.000 description 4
- 238000000034 method Methods 0.000 description 4
- 229920000515 polycarbonate Polymers 0.000 description 4
- 239000004417 polycarbonate Substances 0.000 description 4
- 229920006324 polyoxymethylene Polymers 0.000 description 4
- 238000004804 winding Methods 0.000 description 4
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 3
- 239000000853 adhesive Substances 0.000 description 3
- 230000001070 adhesive effect Effects 0.000 description 3
- 239000004020 conductor Substances 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 239000004973 liquid crystal related substance Substances 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 229910021421 monocrystalline silicon Inorganic materials 0.000 description 3
- 238000000465 moulding Methods 0.000 description 3
- 238000004886 process control Methods 0.000 description 3
- 229910052710 silicon Inorganic materials 0.000 description 3
- 239000010703 silicon Substances 0.000 description 3
- XECAHXYUAAWDEL-UHFFFAOYSA-N acrylonitrile butadiene styrene Chemical compound C=CC=C.C=CC#N.C=CC1=CC=CC=C1 XECAHXYUAAWDEL-UHFFFAOYSA-N 0.000 description 2
- 229920000122 acrylonitrile butadiene styrene Polymers 0.000 description 2
- 239000004676 acrylonitrile butadiene styrene Substances 0.000 description 2
- 238000005452 bending Methods 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 238000009795 derivation Methods 0.000 description 2
- 230000008054 signal transmission Effects 0.000 description 2
- 229920002379 silicone rubber Polymers 0.000 description 2
- 230000033228 biological regulation Effects 0.000 description 1
- 239000003086 colorant Substances 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 230000013011 mating Effects 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- -1 polyoxymethylene Polymers 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 229920002050 silicone resin Polymers 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 229920003002 synthetic resin Polymers 0.000 description 1
- 239000000057 synthetic resin Substances 0.000 description 1
Images

















Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/033—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor
- G06F3/0354—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor with detection of 2D relative movements between the device, or an operating part thereof, and a plane or surface, e.g. 2D mice, trackballs, pens or pucks
- G06F3/03545—Pens or stylus
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/044—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by capacitive means
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/044—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by capacitive means
- G06F3/0445—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by capacitive means using two or more layers of sensing electrodes, e.g. using two layers of electrodes separated by a dielectric layer
Description
ペン形状を有するとともに先端部に加えられた圧力を検出可能な位置指示器に収納される筆圧検出モジュールであって、
圧力センシングデバイスと、第1のホルダー、及び第2のホルダーを備えており、
前記圧力センシングデバイスは、第1の電極と、前記第1の電極と所定の距離を介して対向して配置されて前記第1の電極との間で静電容量を形成する第2の電極とを備え、前記第1の電極に伝達される圧力に対応して前記第1の電極が変位することで生じる前記静電容量の変化に基づいて圧力を感知し、
前記第1のホルダーには、内形状が筒状の中空部と段差部が形成されて前記中空部に前記第2のホルダーが前記段差部により前記先端部の側に抜け落ちないように収納されているとともに、前記圧力センシングデバイスが前記第2のホルダーに加えられた圧力を感知するように配設されており、
前記第2のホルダーには、前記位置指示器の前記先端部に加えられた圧力を伝達する圧力伝達部材を係合させる係合部が形成されており、
前記圧力センシングデバイスは、前記第1のホルダーに形成された中空部に収納されて前記第2のホルダーに加えられた圧力を感知するように配設されている
ことを特徴とする筆圧検出モジュールを提供する。
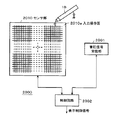
図1〜図7は、この発明による位置指示器の第1の実施形態の構成例を説明するための図である。図2は、この第1の実施形態の位置指示器1を用いる電子機器200の一例を示すものである。この例では、電子機器200は、例えばLCD(Liquid Crystal Display)などの表示装置の表示画面200Dを備える高機能携帯電話端末であり、表示画面200Dの下部(裏側)に、電磁誘導方式の位置検出装置202を備えている。
次に、この実施形態における筆圧検出用モジュール7の構成について、図3、図4及び図6を用いて説明する。
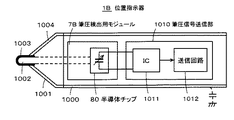
次に、上述の第1の実施形態の位置指示器1を用いて指示位置の検出および筆圧の検出を行う電子機器200の位置検出装置202における回路構成例について、図8を参照して説明する。図8は、位置指示器1及び電子機器200が備える位置検出装置202の回路構成例を示すブロック図である。
<芯体本体部41と内側ホルダー73の係止部材731の凹穴7311での係合関係の他の例>
上述の第1の実施形態では、芯体4の芯体本体部41に環状突部411を設けると共に、内側ホルダー73の係止部材731の凹穴7311に環状突部7312を設け、芯体本体部41の環状突部411が、凹穴7311の環状突部7312を乗り越えたところで両者を係合させるようにした。しかし、芯体本体部41と、係止部材731との係合は、上述の例のような突部同士の係合に限られるものではない。
上述の第1の実施形態の説明では、内側ホルダー73は、第1の部材の例としての係止部材731と、第2の部材の例としての押圧部材732とからなる構成とし、両者を嵌合させるようにした。しかし、係止部材731に押圧部材732を一体的に形成するようにしてもよい。
上述の実施形態においては、内側ホルダー73の圧力センシングデバイス71側の端面の凸形状の突部、すなわち、押圧部材732に設けられた円柱状突部7322や、図10(A)及び(B)に示した突部7316及び7323は、先端面が平面形状とした。しかし、これらの凸形状の突部の先端面の形状は、これに限られるものではない。
上述の実施形態では、圧力伝達部材としては、芯体4そのものとしたが、芯体4に印加される圧力を、圧力センシングデバイス71に伝達することができるものであれば、芯体4に限られるものではない。
上述した第1の実施形態における筆圧検出用モジュールは、第1のホルダーと、第1のホルダー内に収納される第2のホルダーと、圧力センシングデバイスとで構成された。これに対して、第2の実施形態では、1個のホルダーと、圧力センシングデバイスとで構成される。
この第2の実施形態においても、上述の第1の実施形態と同様に、圧力伝達部材とホルダーとの係合関係についての変形例が可能である。
接着してもよいし、また、図示は省略するが、芯体本体部41の先端面41aと弾性体413の一方に突部、他方に凹部を設けて、嵌合させるようにしてもよい。
以上は、電磁誘導方式の位置指示器に、この発明を適用した場合であるが、この発明は、静電容量方式の位置指示器にも適用可能である。
上述の実施形態は、筆圧検出用モジュールの外側ホルダー72(第1の実施形態の場合)、ホルダー74(第2の実施形態の場合)は、位置指示器のケース本体2aに対して軸心方向に移動不可となるように固定される場合である。しかし、第1の実施形態及び第2の実施形態の位置指示器の構成として、位置指示器の全ての部品を所定の細型の筒状ケース内に収納して、いわゆる替え芯のように、ケース本体2a内に収納するようにするカートリッジ式のものの可能であり、このカートリッジ式の細型の筒状ケース内に筆圧検出用モジュールを収納する場合にも、この発明は適用可能である。
Claims (28)
- ペン形状を有するとともに先端部に加えられた圧力を検出可能な位置指示器に収納される筆圧検出モジュールであって、
圧力センシングデバイスと、第1のホルダー、及び第2のホルダーを備えており、
前記圧力センシングデバイスは、第1の電極と、前記第1の電極と所定の距離を介して対向して配置されて前記第1の電極との間で静電容量を形成する第2の電極とを備え、前記第1の電極に伝達される圧力に対応して前記第1の電極が変位することで生じる前記静電容量の変化に基づいて圧力を感知し、
前記第1のホルダーには、内形状が筒状の中空部と段差部が形成されて前記中空部に前記第2のホルダーが前記段差部により前記先端部の側に抜け落ちないように収納されているとともに、前記圧力センシングデバイスが前記第2のホルダーに加えられた圧力を感知するように配設されており、
前記第2のホルダーには、前記位置指示器の前記先端部に加えられた圧力を伝達する圧力伝達部材を係合させる係合部が形成されており、
前記圧力センシングデバイスは、前記第1のホルダーに形成された中空部に収納されて前記第2のホルダーに加えられた圧力を感知するように配設されている
ことを特徴とする筆圧検出モジュール。 - 前記第2のホルダーに形成された前記係合部は、前記第2のホルダーの軸心方向に前記圧力伝達部材が挿入される凹部を備えているとともに、前記凹部の内周面には前記圧力伝達部材を前記第2のホルダーに対して挿脱可能に係止させる係止部が形成されている
ことを特徴とする請求項1に記載の筆圧検出モジュール。 - 前記凹部の内周面に設けられた前記係止部は突部を備えているとともに、前記圧力伝達部材が前記凹部に挿入される所定の位置には突部を備えており、前記圧力伝達部材が前記凹部に挿入されて前記圧力伝達部材の前記突部が前記第2のホルダーの突部を乗り越えて係合することで、前記第2のホルダーが前記圧力伝達部材を係止するようにされていることを特徴とする請求項2に記載の筆圧検出モジュール
- 前記凹部の内周面に設けられた前記係止部は突部あるいは窪部を備えているとともに、前記圧力伝達部材が前記凹部に挿入される所定の位置には前記係止部の前記突部あるいは前記窪部に対応した窪部あるいは突部を備えており、前記圧力伝達部材が前記凹部に挿入されて、突部と窪部の係合関係で前記第2のホルダーが前記圧力伝達部材を係止するようにされていることを特徴とする請求項2に記載の筆圧検出モジュール
- 前記第2のホルダーの前記圧力センシングデバイスが対向する端部は、前記第2のホルダーに伝達された圧力を前記圧力センシングデバイスに伝達するための所定の凸形状を有していることを特徴とする請求項1に記載の筆圧検出モジュール。
- 前記第2のホルダーの前記凸形状の端部は、前記圧力センシングデバイスに当接して圧力を伝達するとともに前記圧力センシングデバイスに当接する面積が前記圧力センシングデバイスに配置された前記第1の電極の面積よりも小さく設定されている
ことを特徴とする請求項5に記載の筆圧検出モジュール。 - 前記第2のホルダーは第1の部材と第2の部材を備えており、前記第1の部材に加えられた圧力が前記第2の部材に伝達されるとともに、前記第2の部材が前記圧力を前記圧力センシングデバイスに伝達するための所定の凸形状を有していることを特徴とする請求項5に記載の筆圧検出モジュール。
- 前記第1の部材の軸心方向に備えられた凹部に前記第2の部材が部分的に収納されていることを特徴とする請求項7に記載の筆圧検出モジュール。
- 前記第2の部材は前記第1の部材よりも弾性係数が小さいこと特徴とする請求項7に記載の筆圧検出モジュール。
- 前記第1のホルダーに形成された前記圧力センシングデバイスが収納される中空部の内面には、前記圧力センシングデバイスと前記第1のホルダーとの間での位置決めを行うリブが形成されていることを特徴とする請求項1に記載の筆圧検出モジュール。
- 前記圧力センシングデバイスは、半導体チップと、前記半導体チップを収納するとともに複数の接続端子を備えたソケットを有しており、
前記半導体チップは、前記第1の電極及び前記第2の電極を備えるとともに、前記第1の電極及び前記第2の電極のそれぞれに接続されて外部に露出して設けられた接続部を備えており、
前記ソケットは、前記半導体チップを収納して前記半導体チップの前記接続部が前記接続端子にそれぞれ接続されていることを特徴とする請求項1に記載の筆圧検出モジュール。 - 前記半導体チップの前記接続部は、前記第1の電極が形成された側の外面と、前記第2の電極が形成された側の外面のそれぞれに設けられていることを特徴とする請求項11に記載の筆圧検出モジュール。
- 前記半導体チップの前記第2の電極に接続された前記接続部の面積は、前記半導体チップの前記第1の電極に接続された前記接続部の面積よりも大きな面積を有しているとともに、前記半導体チップが前記ソケットに収納されることに対応して前記半導体チップの前記第2の電極に接続された前記接続部と前記ソケットに備えられた前記接続端子とが接触することで電気的に接続されるように構成されていることを特徴とする請求項12に記載の筆圧検出モジュール。
- 位置指示器のハウジングに、前記位置指示器の先端部から一端が突出した芯体と、前記芯体に加えられた圧力を検出する請求項1に記載の筆圧検出モジュールが収納されているzことを特徴とする位置指示器。
- 前記ハウジングには、前記圧力センシングデバイスとともに共振回路を構成するインダクタンス素子が収納されており、前記共振回路から電磁誘導信号が送信されるように構成されていることを特徴とする請求項14に記載の位置指示器。
- 前記ハウジングには、前記圧力センシングデバイスで感知された圧力の情報を無線で送信する圧力情報送信回路が収納されていることを特徴とする請求項14に記載の位置指示器。
- 前記芯体の、前記位置指示器の先端部から突出した前記一端とは異なる他端が前記第2のホルダーに形成された前記係合部に挿入されて、前記芯体の前記一端に加えられた圧力が前記筆圧検出モジュールに伝達されるように構成されていることを特徴とする請求項14に記載の位置指示器。
- ペン形状を有するとともに先端部に加えられた圧力を検出可能な位置指示器に収納される筆圧検出モジュールであって、
圧力センシングデバイスと、ホルダーを備えており、
前記圧力センシングデバイスは、第1の電極と、前記第1の電極と所定の距離を介して対向して配置されて前記第1の電極との間で静電容量を形成する第2の電極とを備え、前記第1の電極に伝達される圧力に対応して前記第1の電極が変位することで生じる前記静電容量の変化に基づいて圧力を感知し、
前記ホルダーには、内形状が筒状の中空部と段差部が形成されて前記中空部に前記圧力センシングデバイスが前記段差部により前記先端部の側に抜け落ちないように収納されているとともに、前記中空部に前記位置指示器の前記先端部に加えられた圧力を伝達する圧力伝達部材が収納されて、前記圧力センシングデバイスが前記圧力伝達部材に伝達された圧力を感知するように配設されており、
前記ホルダーに形成された前記中空部の内周面には、前記圧力伝達部材を前記ホルダーに対して挿脱可能に係止させる係止部が前記圧力センシングデバイスより前記先端部側に形成されている
ことを特徴とする筆圧検出モジュール。 - 前記ホルダーの前記内周面に設けられた前記係止部は突部を備えているとともに、前記圧力伝達部材が前記ホルダーに形成された前記中空部に挿入される所定の位置には突部を備えており、前記圧力伝達部材が前記中空部に挿入されて前記圧力伝達部材の前記突部が前記ホルダーの内周面に備える前記突部を乗り越えて係合することで、前記ホルダーが前記圧力伝達部材を係止するようにされていることを特徴とする請求項18に記載の筆圧検出モジュール。
- 前記ホルダーの前記内周面に設けられた前記係止部は突部あるいは窪部を備えているとともに、前記圧力伝達部材が前記ホルダーに形成された前記中空部に挿入される所定の位置には前記ホルダーの内周面に備える前記突部あるいは前記窪部に対応した窪部あるいは突部を備えており、前記圧力伝達部材が前記中空部に挿入されて、突部と窪部の係合関係で前記ホルダーが前記圧力伝達部材を係止するようにされていることを特徴とする請求項18に記載の筆圧検出モジュール。
- 前記位置指示器のハウジングには、請求項18に記載の前記筆圧モジュールを係止するための係止部が形成されて前記筆圧モジュールを収納するとともに、前記ホルダーに形成された前記中空部に収納された前記圧力伝達部材が前記位置指示器の前記先端部から露出しており、前記先端部から露出した前記圧力伝達部材に加えられた圧力が前記圧力センシングデバイスに伝達されるように構成されていることを特徴とする位置指示器。
- ペン形状を有するとともに先端部に加えられた圧力を検出可能な位置指示器に収納される筆圧検出モジュールであって、
圧力センシングデバイスと、第1のホルダー、及び第2のホルダーを備えており、
前記圧力センシングデバイスは、第1の電極と、前記第1の電極と所定の距離を介して対向して配置されて前記第1の電極との間で静電容量を形成する第2の電極とを備え、前記第1の電極に伝達される圧力に対応して前記第1の電極が変位することで生じる前記静電容量の変化に基づいて圧力を感知し、
前記第1のホルダーには、内形状が筒状の中空部が形成されて前記中空部に前記第2のホルダーが収納されているとともに、前記圧力センシングデバイスが前記第2のホルダーに加えられた圧力を感知するように配設されており、
前記第2のホルダーには、前記位置指示器の前記先端部に加えられた圧力を伝達する圧力伝達部材を係合させる係合部が形成されており、
前記第2のホルダーは第1の部材と第2の部材を備えており、前記第1の部材に加えられた圧力が前記第2の部材に伝達されるとともに、前記第2の部材の前記圧力センシングデバイスが対向する端部は、前記圧力を前記圧力センシングデバイスに伝達するための所定の凸形状を有していることを特徴とする筆圧検出モジュール。 - 前記第1の部材の軸心方向に備えられた凹部に前記第2の部材が部分的に収納されていることを特徴とする請求項22に記載の筆圧検出モジュール。
- 前記第2の部材は前記第1の部材よりも弾性係数が小さいこと特徴とする請求項22に記載の筆圧検出モジュール。
- 前記圧力センシングデバイスは、前記第1のホルダーに形成された中空部に収納されて前記第2のホルダーに加えられた圧力を感知するように配設されており、
前記第1のホルダーに形成された前記圧力センシングデバイスが収納される中空部の内面には、前記圧力センシングデバイスと前記第1のホルダーとの間での位置決めを行うリブが形成されていることを特徴とする請求項22に記載の筆圧検出モジュール。 - ペン形状を有するとともに先端部に加えられた圧力を検出可能な位置指示器に収納される筆圧検出モジュールであって、
圧力センシングデバイスと、第1のホルダー、及び第2のホルダーを備えており、
前記圧力センシングデバイスは、第1の電極と、前記第1の電極と所定の距離を介して対向して配置されて前記第1の電極との間で静電容量を形成する第2の電極とを備え、前記第1の電極に伝達される圧力に対応して前記第1の電極が変位することで生じる前記静電容量の変化に基づいて圧力を感知し、
前記第1のホルダーには、内形状が筒状の中空部が形成されて前記中空部に前記第2のホルダーが収納されているとともに、前記圧力センシングデバイスが前記第2のホルダーに加えられた圧力を感知するように配設されており、
前記第2のホルダーには、前記位置指示器の前記先端部に加えられた圧力を伝達する圧力伝達部材を係合させる係合部が形成されており、
前記圧力センシングデバイスは、半導体チップと、前記半導体チップを収納するとともに複数の接続端子を備えたソケットを有しており、
前記半導体チップは、前記第1の電極及び前記第2の電極を備えるとともに、前記第1の電極及び前記第2の電極のそれぞれに接続されて外部に露出して設けられた接続部を備えており、
前記ソケットは、前記半導体チップを収納して前記半導体チップの前記接続部が前記接続端子にそれぞれ接続されていることを特徴とする筆圧検出モジュール。 - 前記半導体チップの前記接続部は、前記第1の電極が形成された側の外面と、前記第2の電極が形成された側の外面のそれぞれに設けられていることを特徴とする請求項26に記載の筆圧検出モジュール。
- 前記半導体チップの前記第2の電極に接続された前記接続部の面積は、前記半導体チップの前記第1の電極に接続された前記接続部の面積よりも大きな面積を有しているとともに、前記半導体チップが前記ソケットに収納されることに対応して前記半導体チップの前記第2の電極に接続された前記接続部と前記ソケットに備えられた前記接続端子とが接触することで電気的に接続されるように構成されていることを特徴とする請求項27に記載の筆圧検出モジュール。
Priority Applications (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013161916A JP6261230B2 (ja) | 2013-08-03 | 2013-08-03 | 筆圧検出モジュール及び位置指示器 |
| TW103113665A TWI625651B (zh) | 2013-08-03 | 2014-04-15 | 筆壓偵測模組及位置指示器 |
| US14/259,049 US9513719B2 (en) | 2013-08-03 | 2014-04-22 | Pen pressure detecting module and position indicator |
| CN201410341712.XA CN104345921B (zh) | 2013-08-03 | 2014-07-17 | 笔压检测模块及位置指示器 |
| CN201420396481.8U CN203982305U (zh) | 2013-08-03 | 2014-07-17 | 笔压检测模块及位置指示器 |
| EP14177576.7A EP2833244B1 (en) | 2013-08-03 | 2014-07-18 | Pen pressure detecting module and position indicator |
| KR1020140093318A KR102252585B1 (ko) | 2013-08-03 | 2014-07-23 | 필압 검출 모듈 및 위치 지시기 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013161916A JP6261230B2 (ja) | 2013-08-03 | 2013-08-03 | 筆圧検出モジュール及び位置指示器 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015032167A JP2015032167A (ja) | 2015-02-16 |
| JP2015032167A5 JP2015032167A5 (ja) | 2016-09-08 |
| JP6261230B2 true JP6261230B2 (ja) | 2018-01-17 |
Family
ID=51266091
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013161916A Active JP6261230B2 (ja) | 2013-08-03 | 2013-08-03 | 筆圧検出モジュール及び位置指示器 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9513719B2 (ja) |
| EP (1) | EP2833244B1 (ja) |
| JP (1) | JP6261230B2 (ja) |
| KR (1) | KR102252585B1 (ja) |
| CN (2) | CN104345921B (ja) |
| TW (1) | TWI625651B (ja) |
Families Citing this family (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6261230B2 (ja) * | 2013-08-03 | 2018-01-17 | 株式会社ワコム | 筆圧検出モジュール及び位置指示器 |
| TWI529567B (zh) * | 2014-01-29 | 2016-04-11 | 和冠股份有限公司 | 薄形化電磁式手寫筆及其製作方法 |
| CN105278704A (zh) * | 2014-07-17 | 2016-01-27 | 致伸科技股份有限公司 | 触控笔 |
| WO2016121478A1 (ja) * | 2015-01-30 | 2016-08-04 | 株式会社ワコム | 位置指示器 |
| EP3267294B1 (en) * | 2015-03-06 | 2019-05-08 | Wacom Co., Ltd. | Electronic pen and electronic pen main body unit |
| WO2016185915A1 (ja) * | 2015-05-15 | 2016-11-24 | 株式会社ワコム | 電子ペン |
| EP3316104B1 (en) * | 2015-06-25 | 2020-02-12 | Wacom Co., Ltd. | Magnetic core coil and electronic pen |
| KR102386480B1 (ko) * | 2015-10-05 | 2022-04-15 | 삼성전자주식회사 | 전자 기기의 입력 식별 방법 및 장치 |
| TWI552031B (zh) * | 2015-10-16 | 2016-10-01 | 翰碩電子股份有限公司 | 具可調式壓力感測結構的電容觸控筆 |
| TWI736580B (zh) * | 2016-04-22 | 2021-08-21 | 日商和冠股份有限公司 | 電子筆及電子筆本體部 |
| CN107305819B (zh) * | 2016-04-22 | 2019-09-13 | 原相科技股份有限公司 | 具有力反馈功能的电子开关 |
| CN106201025B (zh) * | 2016-06-28 | 2019-08-27 | 深圳市绘王动漫科技有限公司 | 电子手写笔及电子手写系统 |
| JP6694347B2 (ja) * | 2016-07-25 | 2020-05-13 | 株式会社ワコム | 電子ペン |
| US10296089B2 (en) * | 2016-08-10 | 2019-05-21 | Microsoft Technology Licensing, Llc | Haptic stylus |
| CN109690269B (zh) * | 2016-09-14 | 2022-04-29 | 索尼公司 | 传感器、输入装置和电子设备 |
| TWI599919B (zh) * | 2016-10-28 | 2017-09-21 | 翰碩電子股份有限公司 | 具有雙發射電極之電容筆 |
| JP6767252B2 (ja) * | 2016-12-09 | 2020-10-14 | 株式会社ワコム | 電子ペン |
| WO2018173420A1 (ja) * | 2017-03-24 | 2018-09-27 | 株式会社ワコム | 電子ペン |
| JP2018180974A (ja) * | 2017-04-14 | 2018-11-15 | 株式会社ワコム | スタイラス |
| CN107391399B (zh) * | 2017-07-06 | 2022-01-11 | Tcl移动通信科技(宁波)有限公司 | 一种移动终端及其sd卡检测频率控制方法、及存储介质 |
| CN111033449B (zh) * | 2017-09-05 | 2023-08-08 | 株式会社和冠 | 电子笔及电子笔用的笔芯 |
| WO2019082478A1 (ja) * | 2017-10-25 | 2019-05-02 | 株式会社ワコム | 位置指示器及び位置指示装置並びに位置指示器の傾きの検出方法 |
| CN110825247B (zh) * | 2018-08-07 | 2023-09-22 | 深圳普赢创新科技股份有限公司 | 压力感测位置指示装置 |
| TWI690827B (zh) * | 2018-10-01 | 2020-04-11 | 幸芯科技有限公司 | 具導向壓感結構的觸控筆 |
| CN109551121B (zh) * | 2018-12-26 | 2021-02-19 | 东莞市新美洋技术有限公司 | 金属管材的切割方法 |
| WO2020148977A1 (ja) * | 2019-01-17 | 2020-07-23 | 株式会社ワコム | 静電結合方式の電子ペン |
| CN113544629A (zh) * | 2019-03-22 | 2021-10-22 | 株式会社和冠 | 电子笔 |
| JP2022104105A (ja) * | 2020-12-28 | 2022-07-08 | 日本電産株式会社 | 入力デバイス、及び、表示入力システム |
| CN113282184B (zh) * | 2021-04-16 | 2023-08-11 | 深圳市信维通信股份有限公司 | 电容触控笔 |
| CN113534984B (zh) * | 2021-07-20 | 2023-06-13 | 深圳市绘王动漫科技有限公司 | 手写笔 |
| CN113721776A (zh) * | 2021-09-02 | 2021-11-30 | 北京云蝶智学科技有限公司 | 压感检测装置 |
| CN116301411B (zh) * | 2023-05-25 | 2023-08-04 | 南京湃睿半导体有限公司 | 压感分级感应装置、压感感应方法及静电容式触控笔 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3150685B2 (ja) * | 1990-08-06 | 2001-03-26 | 株式会社ワコム | 可変容量コンデンサ |
| JPH0656829U (ja) * | 1991-06-28 | 1994-08-05 | 株式会社ワコム | スタイラスペン |
| JP3071553B2 (ja) * | 1992-03-24 | 2000-07-31 | 株式会社ワコム | 可変容量コンデンサ及びこれを利用した位置指示器 |
| JP2929855B2 (ja) * | 1992-07-24 | 1999-08-03 | 株式会社村田製作所 | 軸の抜け止め構造の形成方法及びそれにより形成した軸の抜け止め構造を有する電子部品 |
| TW539181U (en) * | 2002-02-01 | 2003-06-21 | Jin-Ming Shiu | Improved structure for touch pen |
| JP5534419B2 (ja) * | 2010-03-09 | 2014-07-02 | 株式会社ワコム | 位置指示器、可変容量コンデンサ及び入力装置 |
| CN102200845A (zh) * | 2010-03-22 | 2011-09-28 | 深圳富泰宏精密工业有限公司 | 手写笔 |
| JP5483430B2 (ja) * | 2010-03-31 | 2014-05-07 | 株式会社ワコム | 可変容量コンデンサおよび位置指示器 |
| JP5569939B2 (ja) * | 2010-09-27 | 2014-08-13 | 株式会社ワコム | 可変容量コンデンサ、位置指示器および入力装置 |
| JP2013156066A (ja) * | 2012-01-27 | 2013-08-15 | Wacom Co Ltd | 静電容量方式圧力センシング半導体デバイス |
| JP5892595B2 (ja) * | 2012-02-06 | 2016-03-23 | 株式会社ワコム | 位置指示器 |
| JP6261230B2 (ja) * | 2013-08-03 | 2018-01-17 | 株式会社ワコム | 筆圧検出モジュール及び位置指示器 |
-
2013
- 2013-08-03 JP JP2013161916A patent/JP6261230B2/ja active Active
-
2014
- 2014-04-15 TW TW103113665A patent/TWI625651B/zh not_active IP Right Cessation
- 2014-04-22 US US14/259,049 patent/US9513719B2/en active Active
- 2014-07-17 CN CN201410341712.XA patent/CN104345921B/zh active Active
- 2014-07-17 CN CN201420396481.8U patent/CN203982305U/zh active Active
- 2014-07-18 EP EP14177576.7A patent/EP2833244B1/en active Active
- 2014-07-23 KR KR1020140093318A patent/KR102252585B1/ko active IP Right Grant
Also Published As
| Publication number | Publication date |
|---|---|
| CN104345921B (zh) | 2020-04-14 |
| US9513719B2 (en) | 2016-12-06 |
| CN104345921A (zh) | 2015-02-11 |
| EP2833244A3 (en) | 2015-04-08 |
| TW201508584A (zh) | 2015-03-01 |
| CN203982305U (zh) | 2014-12-03 |
| KR102252585B1 (ko) | 2021-05-18 |
| JP2015032167A (ja) | 2015-02-16 |
| EP2833244A2 (en) | 2015-02-04 |
| TWI625651B (zh) | 2018-06-01 |
| US20150035807A1 (en) | 2015-02-05 |
| KR20150016098A (ko) | 2015-02-11 |
| EP2833244B1 (en) | 2018-08-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6261230B2 (ja) | 筆圧検出モジュール及び位置指示器 | |
| US11029768B2 (en) | Position pointer with connector that electrically connects first circuitry and second circuitry while first housing and second housing are mated to each other | |
| JP5647715B1 (ja) | 位置指示器 | |
| EP2790085B1 (en) | Position indicator | |
| JP5999803B1 (ja) | 位置指示器 | |
| EP2708993B1 (en) | Position indicator of electromagnetic induction system and electronic ink cartridge | |
| JP2014067265A5 (ja) | ||
| JP6368018B2 (ja) | 位置指示器 | |
| JP2014021674A (ja) | 位置指示器 | |
| JP2017139016A (ja) | 電子ペン及び電子ペン本体部 | |
| CN112236656B (zh) | 压力检测元件 | |
| JP6194090B2 (ja) | カートリッジ | |
| JP2009130135A (ja) | 可変容量コンデンサ、位置指示器及び座標入力装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160720 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160720 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170413 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170419 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170619 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171004 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171010 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171101 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171102 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20171115 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171212 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6261230 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |