JP6243094B2 - シート搬送装置及びその制御方法、情報読取装置 - Google Patents
シート搬送装置及びその制御方法、情報読取装置 Download PDFInfo
- Publication number
- JP6243094B2 JP6243094B2 JP2011157163A JP2011157163A JP6243094B2 JP 6243094 B2 JP6243094 B2 JP 6243094B2 JP 2011157163 A JP2011157163 A JP 2011157163A JP 2011157163 A JP2011157163 A JP 2011157163A JP 6243094 B2 JP6243094 B2 JP 6243094B2
- Authority
- JP
- Japan
- Prior art keywords
- sheet
- feeding
- unit
- feed
- mode
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 24
- 230000032258 transport Effects 0.000 claims description 106
- 238000001514 detection method Methods 0.000 claims description 100
- 238000000926 separation method Methods 0.000 claims description 29
- 238000012840 feeding operation Methods 0.000 claims description 21
- 238000012546 transfer Methods 0.000 claims description 3
- 238000011144 upstream manufacturing Methods 0.000 description 21
- 238000012545 processing Methods 0.000 description 19
- 230000008569 process Effects 0.000 description 15
- 230000005540 biological transmission Effects 0.000 description 14
- 230000001276 controlling effect Effects 0.000 description 11
- 238000010586 diagram Methods 0.000 description 9
- 230000002093 peripheral effect Effects 0.000 description 6
- 230000007246 mechanism Effects 0.000 description 5
- 230000003111 delayed effect Effects 0.000 description 4
- 230000003287 optical effect Effects 0.000 description 4
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 230000035939 shock Effects 0.000 description 2
- 101000911772 Homo sapiens Hsc70-interacting protein Proteins 0.000 description 1
- 101001139126 Homo sapiens Krueppel-like factor 6 Proteins 0.000 description 1
- 101000661807 Homo sapiens Suppressor of tumorigenicity 14 protein Proteins 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000000052 comparative effect Effects 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 230000001934 delay Effects 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 230000009931 harmful effect Effects 0.000 description 1
- 230000010365 information processing Effects 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
Images



















Landscapes
- Facsimiles In General (AREA)
- Delivering By Means Of Belts And Rollers (AREA)
- Sheets, Magazines, And Separation Thereof (AREA)
Description
前記給送部からのシートを前記搬送路に沿って搬送する搬送部と、
前記搬送路に設けられ、搬送されるシートの情報を読み取る情報読取部と、
前記給送部のシート送り速度Vf及び前記搬送部のシート送り速度Vmを制御する送り速度制御部と、
前記給送部及び前記搬送部のシート送り速度比をC1=Vf/Vmとした第1送りモードと、前記第1送りモードよりもシート送り量が小さいモードであって且つ前記給送部及び前記搬送部のシート送り速度比をC2=Vf´/Vm´として前記第1送りモードで送るシートよりも薄手のシートをC 1 <C 2 ≦1かつVf´<Vfの条件を満たすようにして送るモードである第2送りモードとをユーザ操作に応じて切り替える送りモード切替制御部とを備え、
前記ユーザ操作に応じた前記送りモード切替制御部による前記第1送りモードから前記第2送りモードへのモード切替に基づいて、前記送り速度制御部が前記給送部及び前記搬送部のシート送り速度比をC1からC2に設定する制御を実行してから、前記給送部によるシートの給送を開始することを特徴とするシート情報読取装置も対象とする。
<装置構成>
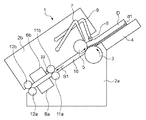
図1乃至図3を参照して、本実施形態のシート搬送装置の一例としての原稿読取装置(シート情報読取装置の一例)の構成について説明する。
次に、図10を参照して、本実施形態の原稿読取装置の制御系の構成について説明する。
次に、図6、図7及び図11を参照して、本実施形態の原稿読取装置の動作フローについて説明する。
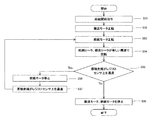
以下、図14と図1、図10とを参照して、原稿読取装置1の通常モードの給紙・搬送の動作フローについて説明する。
以下、図15と図1、図10とを参照して、原稿読取装置1の薄紙モードの給紙・搬送の動作フローについて説明する。
図16は本発明の一実施形態に係る画像読取装置Aの概略図である。なお、本実施形態では本発明のシート搬送装置を画像読取装置に適用した例を示すが、読み取る情報は画像に限られず、各種の情報を読み取る情報読取装置に適用可能である。また、本発明のシート搬送装置はプリンタ等、他の種類の装置にも適用可能である。なお、以下の説明においてシート搬送路における上流側または下流側とはシートの搬送方向を基準としたものである。
画像読取装置Aは、原稿台10に積載された複数枚のシートSを1枚ずつ装置内に経路(シート搬送路)RTにて搬送してその画像を読み取り、排出トレイ20に排出する装置である。読み取り原稿としてのシートSは、例えば、OA紙、チェック、小切手等である。
画像読取装置Aの基本的な動作について説明する。制御部60は、例えば画像読取装置Aが接続された外部パソコンから原稿読み取りの開始指示を受信すると、第1乃至第3搬送部100乃至300の駆動を開始する。原稿台10に積載された複数枚のシートSはその最も下に位置するシートSから1枚ずつ搬送される。
上記実施形態2では、位置検出センサ500を重送検出センサ400よりも下流側に配置したが、その位置は第1搬送部100と第2搬送部200との間であればどの位置でもよい。図20(A)は一例として、位置検出センサ500を重送検出センサ400よりも上流側に配置した例を示す。この例の場合、位置検出センサ500でシートSが検出(検出結果が非検出→検出に変化)された後、一定量の搬送の後、第1搬送部100の搬送を遅延することで、シートSが重送検出センサ400により重送を検出可能な位置に到達してから搬送遅延を行うことができる。一定量の搬送の判断は、時間を基準としてもよいし、駆動部3をステッピングモータとした場合は駆動パルス数を基準としてもよい。
上記実施形態2では、原稿台1上のシートSを下側から順次搬送する構成としたが、上側から順次搬送する構成としてもよい。図21は本発明の他の実施形態に係る画像読取装置Bの概略図である。図16の画像読取装置Aと同様の構成については同じ符号を付して説明を割愛し、以下、異なる構成について説明する。なお、図6においては駆動部30、40、伝達部50、制御部60は図示を省略している。
図22は、本発明の実施形態5に係るシート処理装置の概略図である。本実施形態のシート処理装置800は、図22に示すように、シートを搬送する機能を備えたシート搬送装置801を有し、このシート搬送装置801の搬送路802の両側に一対の画像読取センサ803を対向配置して、シート両面の画像を同時に読み取ることを可能とした画像読取装置に関する。
d1 最下層原稿
1 原稿読取装置
2a 下部ガイドユニット
2b 上部ガイドユニット
3 給紙ローラ
4 給紙トレイ
5 分離ローラ
6 読取センサ
7 ストッパー
8 付勢ローラ
9 付勢ローラアーム
11a,11b 上流側搬送ローラ対
12a,12b 下流側搬送ローラ対
13 給紙モータ
17 搬送モータ
23 レジストセンサ
32 ワンウェイクラッチ
33 軸
34 カム部材
35,36 バネ
Claims (9)
- 複数枚のシートを搬送路に向けて1枚ずつ順次給送する給送部と、
前記給送部からのシートを前記搬送路に沿って搬送する搬送部と、
前記給送部のシート送り速度Vf及び前記搬送部のシート送り速度Vmを制御する送り速度制御部と、
前記給送部及び前記搬送部のシート送り速度比をC1=Vf/Vmとした第1送りモードと、前記第1送りモードよりもシート送り量が小さいモードであって且つ前記給送部及び前記搬送部のシート送り速度比をC2=Vf´/Vm´として前記第1送りモードで送るシートよりも薄手のシートをC 1 <C 2 ≦1かつV f ´<V f の条件を満たすようにして送るモードである第2送りモードとをユーザ操作に応じて切り替える送りモード切替制御部とを備え、
前記ユーザ操作に応じた前記送りモード切替制御部による前記第1送りモードから前記第2送りモードへのモード切替に基づいて、前記送り速度制御部が前記給送部及び前記搬送部のシート送り速度比をC1からC2に設定する制御を実行してから、前記給送部によるシートの給送を開始することを特徴とするシート搬送装置。 - 前記送り速度制御部は、前記給送部のシート送り速度を前記搬送部のシート送り速度よりも小さい条件に制御することで、先行シートと後続シートとの間隔を形成することを特徴とする請求項1に記載のシート搬送装置。
- 前記給送部と前記搬送部との間に設けられて前記給送部から給送されるシートを検出する検出部を更に備え、
前記送り速度制御部は、前記検出部の検出結果に基づいて前記給送部での給送動作の停止又は減速制御を実行後に、再起動又は再加速制御することを特徴とする請求項1または2に記載のシート搬送装置。 - 前記送り速度制御部は、前記検出部の検出結果に基づいて前記給送部による給送動作の再加速制御を行って前記給送部から前記搬送部へのシート送りの受け渡しを行うよう制御することを特徴とする請求項3に記載のシート搬送装置。
- 前記送り速度制御部は、前記給送部による給送動作の停止又は減速と、その後の再加速とを繰り返し制御することにより、先行シートと後続シートとのシート間隔を作るようにしたことを特徴とする請求項3又は4に記載のシート搬送装置。
- 前記送り速度制御部は、前記検出部の検出結果に基づいて前記検出部の検出位置又はその下流位置でシートの給送動作を一時停止し、前記給送部での給送動作を再開制御することを特徴とする請求項3〜5のいずれか1項に記載のシート搬送装置。
- 前記給送部は、前記複数枚のシートからシートを1枚ずつ分離する分離ローラと当該分離ローラと対向配置される送りローラとの間でシートを挟みながら給送するものであることを特徴とする請求項1〜6のいずれか1項に記載のシート搬送装置。
- 複数枚のシートを搬送路に向けて1枚ずつ順次給送する給送部と、
前記給送部からのシートを前記搬送路に沿って搬送する搬送部と、
前記給送部のシート送り速度Vf及び前記搬送部のシート送り速度Vmを制御する送り速度制御部と、
前記給送部及び前記搬送部のシート送り速度比をC1=Vf/Vmとした第1送りモードと、前記第1送りモードよりもシート送り量が小さいモードであって且つ前記給送部及び前記搬送部のシート送り速度比をC2=Vf´/Vm´として前記第1送りモードで送るシートよりも薄手のシートをC 1 <C 2 ≦1かつV f ´<V f の条件を満たすようにして送るモードである第2送りモードとをユーザ操作に応じて切り替える送りモード切替制御部とを備えるシート搬送装置を制御するに際し、
前記ユーザ操作に応じた前記送りモード切替制御部による前記第1送りモードから前記第2送りモードへのモード切替に基づいて、前記送り速度制御部が前記給送部及び前記搬送部のシート送り速度比をC1からC2に設定する制御を実行してから、前記給送部によるシートの給送を開始することを特徴とするシート搬送装置の制御方法。 - 複数枚のシートを搬送路に向けて1枚ずつ順次給送する給送部と、
前記給送部からのシートを前記搬送路に沿って搬送する搬送部と、
前記搬送路に設けられ、搬送されるシートの情報を読み取る情報読取部と、
前記給送部のシート送り速度Vf及び前記搬送部のシート送り速度Vmを制御する送り速度制御部と、
前記給送部及び前記搬送部のシート送り速度比をC1=Vf/Vmとした第1送りモードと、前記第1送りモードよりもシート送り量が小さいモードであって且つ前記給送部及び前記搬送部のシート送り速度比をC2=Vf´/Vm´として前記第1送りモードで送るシートよりも薄手のシートをC 1 <C 2 ≦1かつV f ´<V f の条件を満たすようにして送るモードである第2送りモードとをユーザ操作に応じて切り替える送りモード切替制御部とを備え、
前記ユーザ操作に応じた前記送りモード切替制御部による前記第1送りモードから前記第2送りモードへのモード切替に基づいて、前記送り速度制御部が前記給送部及び前記搬送部のシート送り速度比をC1からC2に設定する制御を実行してから、前記給送部によるシートの給送を開始することを特徴とするシート情報読取装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011157163A JP6243094B2 (ja) | 2011-07-15 | 2011-07-15 | シート搬送装置及びその制御方法、情報読取装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011157163A JP6243094B2 (ja) | 2011-07-15 | 2011-07-15 | シート搬送装置及びその制御方法、情報読取装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015197945A Division JP5886468B2 (ja) | 2015-10-05 | 2015-10-05 | シート搬送装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013023307A JP2013023307A (ja) | 2013-02-04 |
| JP2013023307A5 JP2013023307A5 (ja) | 2014-09-04 |
| JP6243094B2 true JP6243094B2 (ja) | 2017-12-06 |
Family
ID=47782072
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011157163A Active JP6243094B2 (ja) | 2011-07-15 | 2011-07-15 | シート搬送装置及びその制御方法、情報読取装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6243094B2 (ja) |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6896013B2 (ja) * | 2015-02-12 | 2021-06-30 | セイコーエプソン株式会社 | 画像読取装置 |
| JP6515563B2 (ja) | 2015-02-12 | 2019-05-22 | セイコーエプソン株式会社 | 画像読取装置 |
| JP5886468B2 (ja) * | 2015-10-05 | 2016-03-16 | キヤノン電子株式会社 | シート搬送装置 |
| JP6619629B2 (ja) * | 2015-11-20 | 2019-12-11 | キヤノン電子株式会社 | 画像読取装置 |
| CN108290697B (zh) | 2015-11-20 | 2019-11-15 | 佳能电子株式会社 | 片材输送装置 |
| JP6770247B2 (ja) * | 2016-06-15 | 2020-10-14 | セイコーエプソン株式会社 | 媒体給送装置及び画像読取装置 |
| JP2018182486A (ja) * | 2017-04-10 | 2018-11-15 | ▲うぇい▼強科技股▲ふん▼有限公司 | スキャンデバイス及びそのイメージスキャン方法 |
| JP6909918B2 (ja) * | 2019-04-16 | 2021-07-28 | セイコーエプソン株式会社 | 画像読取装置 |
| JP7322571B2 (ja) * | 2019-07-25 | 2023-08-08 | セイコーエプソン株式会社 | 画像読取装置 |
| JP6813646B2 (ja) * | 2019-09-24 | 2021-01-13 | 株式会社ユニバーサルエンターテインメント | 遊技機 |
| JP7494484B2 (ja) * | 2020-02-26 | 2024-06-04 | 京セラドキュメントソリューションズ株式会社 | 原稿搬送装置 |
| JP7435070B2 (ja) * | 2020-03-12 | 2024-02-21 | 株式会社リコー | 画像読取装置、画像形成システム |
| JP6842077B2 (ja) * | 2020-09-25 | 2021-03-17 | セイコーエプソン株式会社 | 媒体給送装置及び画像読取装置 |
| JP7165231B2 (ja) * | 2020-12-25 | 2022-11-02 | セイコーエプソン株式会社 | 画像読取装置 |
| JP7201111B2 (ja) | 2021-02-05 | 2023-01-10 | セイコーエプソン株式会社 | 画像読取装置 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001031289A (ja) * | 1999-07-21 | 2001-02-06 | Canon Inc | 画像形成装置 |
| JP2004099212A (ja) * | 2002-09-05 | 2004-04-02 | Canon Inc | シート搬送装置およびシート搬送方法と該シート搬送装置を備えた画像形成装置、画像読取装置 |
| JP2004331357A (ja) * | 2003-05-09 | 2004-11-25 | Ricoh Co Ltd | 用紙搬送装置及びその用紙搬送装置を具備する画像形成装置 |
| JP2008189449A (ja) * | 2007-02-06 | 2008-08-21 | Matsushita Electric Ind Co Ltd | シート材供給装置 |
| JP2008213993A (ja) * | 2007-03-01 | 2008-09-18 | Canon Inc | 記録装置 |
| JP4916369B2 (ja) * | 2007-04-17 | 2012-04-11 | 株式会社Pfu | 画像読取装置 |
| JP2009161292A (ja) * | 2007-12-28 | 2009-07-23 | Murata Mach Ltd | 画像読取装置 |
| JP2009249126A (ja) * | 2008-04-08 | 2009-10-29 | Konica Minolta Business Technologies Inc | 用紙給紙装置及び原稿読み取り装置 |
-
2011
- 2011-07-15 JP JP2011157163A patent/JP6243094B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013023307A (ja) | 2013-02-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6243094B2 (ja) | シート搬送装置及びその制御方法、情報読取装置 | |
| JP5886468B2 (ja) | シート搬送装置 | |
| EP3506616B1 (en) | Medium feeding apparatus and image reading apparatus | |
| US8104765B2 (en) | Document feeder for efficiently supplying originals and storing originals in a discharge stacker after reading | |
| US8267399B2 (en) | Sheet processing apparatus and image forming apparatus including same | |
| JP4072516B2 (ja) | 両面原稿搬送装置 | |
| TWI680932B (zh) | 媒體饋送裝置及圖像讀取裝置 | |
| JP2005001827A (ja) | シート搬送装置及びこれを備えた画像読取装置 | |
| JP2008162705A (ja) | シート搬送装置 | |
| JP5162692B2 (ja) | 両面原稿搬送装置および両面原稿搬送装置の原稿搬送方法 | |
| JP5965086B2 (ja) | シート搬送装置 | |
| KR100465242B1 (ko) | 사무기기의 구동장치 및 그 방법 | |
| JP4249050B2 (ja) | 給紙装置および画像形成装置 | |
| JP2006206247A (ja) | 自動原稿搬送装置および画像形成装置 | |
| JP4050177B2 (ja) | 自動原稿搬送装置 | |
| JP4328759B2 (ja) | シート状部材搬送装置および原稿両面読取装置 | |
| JP2006298639A (ja) | シート搬送装置、シート処理装置及び画像形成装置 | |
| JPH0967035A (ja) | シート給送装置及び該シート給送装置を備えた画像形成装置 | |
| JPH10218403A (ja) | 給紙装置及びこれを用いた画像形成装置 | |
| JP2000264460A (ja) | シート材給送装置及びシート材処理装置 | |
| JP2001039603A (ja) | 原稿給紙装置 | |
| JP2001088946A (ja) | 画像形成装置の両面ユニット | |
| JP5798803B2 (ja) | 原稿搬送装置及び画像読取装置 | |
| JP3830719B2 (ja) | 給紙装置、これを備えたシート搬送装置、画像読取装置、並びに画像形成装置 | |
| JP2013028408A (ja) | 用紙処理装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140715 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20140715 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140718 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150414 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150427 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150626 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150807 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151005 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20151102 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160201 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20160208 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20160311 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171109 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6243094 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |