JP6237567B2 - 倒立型移動体 - Google Patents
倒立型移動体 Download PDFInfo
- Publication number
- JP6237567B2 JP6237567B2 JP2014213490A JP2014213490A JP6237567B2 JP 6237567 B2 JP6237567 B2 JP 6237567B2 JP 2014213490 A JP2014213490 A JP 2014213490A JP 2014213490 A JP2014213490 A JP 2014213490A JP 6237567 B2 JP6237567 B2 JP 6237567B2
- Authority
- JP
- Japan
- Prior art keywords
- moving body
- speed
- target angle
- unit
- inverted
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Landscapes
- Motorcycle And Bicycle Frame (AREA)
Description
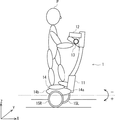
以下、図面を参照して本発明の実施の形態1について説明する。図1に示すように、倒立型移動体1(以下、移動体1とも記載)は、車両本体部11とグリップ部12と指示装置13とステップ部14と車輪15R及び15Lを備える。移動体1は、倒立制御により倒立状態を維持しつつ、車輪15R及び15Lをモータによって駆動することができる二輪車である。
V=(V1+V2)/2・・・(式1)
の通り求める。そして、速度判定部31は、速度Vが閾値v1以上であるか否かを判定する。このv1は、移動体1が前進しているか又は後退しているかを判定するための閾値であり、例えば0に近い値である。
s1=s0−α・・・(式2)
となるように目標角s1を設定する。
s1=s0+α・・・(式3)
と設定される。以上のように設定した目標角を、目標角設定部32はステップ傾斜部27に出力する。ステップ傾斜部27は、ステップ部14の実際の傾斜角を、以上のように設定された目標角に合わせる制御を行う。なお、(式2)及び(式3)でαは0以上の値であり、1回の制御で変更される角度の値である。角度のプラス方向及びマイナス方向の定義は上述の通りである。
実施の形態1では、グリップ部12に指示装置13として押しボタン式のスイッチが設けられている例を説明した。しかしながら、指示装置13の例は以上に限られない。実施の形態2では、指示装置13のバリエーションについて説明する。
11 車両本体部
12 グリップ部
13 指示装置
14 ステップ部
15R、15L 車輪
16R、16L 速度センサ
20 制御ユニット
21 姿勢角センサ
22 制御部
22a 演算回路
22b 記憶部
23R、23L 駆動回路
24R、24L 車輪駆動ユニット
24a、24c 駆動モータ
24b、24d 減速ギア
25 バッテリ
26R、26L 速度センサ
27 ステップ傾斜部
31 速度判定部
32 目標角設定部
Claims (1)
- 倒立制御により倒立状態を維持しつつ搭乗者を乗せて走行する倒立型移動体であって、
前記倒立型移動体の速度を検出する速度検出センサと、
前記搭乗者が操作可能な操作部と、
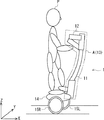
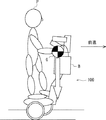
ピッチ方向に傾斜可能であり、前記搭乗者が搭乗の際に足を乗せるステップ部と、
前記操作部が操作されたとき、検出される前記速度が前方向の速度である場合には、前記ステップ部のピッチ方向の目標角を仰角方向に傾け、検出される前記速度が後方向の速度である場合には、前記目標角を俯角方向に傾ける制御を、検出される前記速度の大きさが所定値未満になるまで実行し、
検出される前記速度の大きさが前記所定値未満になったときに、前記目標角をそのときの目標角に設定する制御部と、を備える
倒立型移動体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014213490A JP6237567B2 (ja) | 2014-10-20 | 2014-10-20 | 倒立型移動体 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014213490A JP6237567B2 (ja) | 2014-10-20 | 2014-10-20 | 倒立型移動体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016078718A JP2016078718A (ja) | 2016-05-16 |
| JP6237567B2 true JP6237567B2 (ja) | 2017-11-29 |
Family
ID=55957417
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014213490A Active JP6237567B2 (ja) | 2014-10-20 | 2014-10-20 | 倒立型移動体 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6237567B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6815258B2 (ja) * | 2017-03-31 | 2021-01-20 | 本田技研工業株式会社 | 倒立振子型車両 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5182123B2 (ja) * | 2009-01-28 | 2013-04-10 | 株式会社エクォス・リサーチ | 車両 |
| JP5263058B2 (ja) * | 2009-07-29 | 2013-08-14 | トヨタ自動車株式会社 | 搭乗姿勢保持機構及び同軸二輪車 |
| JP2012076471A (ja) * | 2010-09-30 | 2012-04-19 | Toyota Motor Corp | 移動体 |
| JP2012126224A (ja) * | 2010-12-15 | 2012-07-05 | Bosch Corp | 倒立振子型移動体 |
-
2014
- 2014-10-20 JP JP2014213490A patent/JP6237567B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016078718A (ja) | 2016-05-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6384436B2 (ja) | バランス訓練装置及びその制御方法 | |
| JP5062361B2 (ja) | 移動体 | |
| JP2007336785A (ja) | 走行装置及びその制御方法 | |
| US8949010B2 (en) | Inverted pendulum type vehicle | |
| JP6237567B2 (ja) | 倒立型移動体 | |
| JP6136919B2 (ja) | 倒立型移動体装置 | |
| JP5617595B2 (ja) | 倒立型移動体及びその制御方法 | |
| CN108135765A (zh) | 操作手柄 | |
| JP5617619B2 (ja) | 倒立二輪車 | |
| JP6225869B2 (ja) | 倒立二輪型移動体システム | |
| JP6327095B2 (ja) | バランス訓練機 | |
| JP2016078719A (ja) | 倒立型移動体 | |
| JP2016088307A (ja) | 倒立二輪型移動体 | |
| JP6233265B2 (ja) | 倒立二輪型移動体システム | |
| JP6319162B2 (ja) | バランス訓練システム及び表示制御方法 | |
| JP5966882B2 (ja) | 移動体制御装置、移動体制御方法及びプログラム | |
| JP6233266B2 (ja) | バランス訓練機 | |
| JP2012076471A (ja) | 移動体 | |
| JP6090077B2 (ja) | 倒立型移動体 | |
| JP6265143B2 (ja) | バランス訓練システム | |
| JP6245134B2 (ja) | 倒立型移動体 | |
| JP6011372B2 (ja) | 同軸二輪車及びその制御方法 | |
| JP6287807B2 (ja) | 倒立移動体及びその制御方法 | |
| JP2019043500A (ja) | 倒立二輪車の旋回制御方法 | |
| JP2016049787A (ja) | 倒立型移動体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170118 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170906 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20171003 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171016 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6237567 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |