JP6180964B2 - 車高調整装置 - Google Patents
車高調整装置 Download PDFInfo
- Publication number
- JP6180964B2 JP6180964B2 JP2014036448A JP2014036448A JP6180964B2 JP 6180964 B2 JP6180964 B2 JP 6180964B2 JP 2014036448 A JP2014036448 A JP 2014036448A JP 2014036448 A JP2014036448 A JP 2014036448A JP 6180964 B2 JP6180964 B2 JP 6180964B2
- Authority
- JP
- Japan
- Prior art keywords
- wheel side
- front wheel
- rear wheel
- movement amount
- solenoid valve
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000033001 locomotion Effects 0.000 claims description 152
- 239000010720 hydraulic oil Substances 0.000 claims description 17
- 230000008602 contraction Effects 0.000 claims description 8
- 239000007788 liquid Substances 0.000 description 62
- 239000000725 suspension Substances 0.000 description 59
- 239000003921 oil Substances 0.000 description 37
- 238000001514 detection method Methods 0.000 description 23
- 230000008859 change Effects 0.000 description 21
- 238000010586 diagram Methods 0.000 description 20
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical group [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 16
- 238000013016 damping Methods 0.000 description 12
- 230000000630 rising effect Effects 0.000 description 12
- 230000006870 function Effects 0.000 description 9
- 230000007423 decrease Effects 0.000 description 7
- 239000012530 fluid Substances 0.000 description 6
- 238000005086 pumping Methods 0.000 description 6
- 230000007246 mechanism Effects 0.000 description 5
- 230000002093 peripheral effect Effects 0.000 description 5
- 238000004891 communication Methods 0.000 description 4
- 230000004048 modification Effects 0.000 description 4
- 238000012986 modification Methods 0.000 description 4
- 239000006096 absorbing agent Substances 0.000 description 2
- 238000010521 absorption reaction Methods 0.000 description 2
- 230000009471 action Effects 0.000 description 2
- 230000001174 ascending effect Effects 0.000 description 2
- 238000007599 discharging Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000002828 fuel tank Substances 0.000 description 2
- 230000010354 integration Effects 0.000 description 2
- 230000035939 shock Effects 0.000 description 2
- 230000008901 benefit Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000004069 differentiation Effects 0.000 description 1
- 239000006185 dispersion Substances 0.000 description 1
- 239000000696 magnetic material Substances 0.000 description 1
- 230000015654 memory Effects 0.000 description 1
- 230000003936 working memory Effects 0.000 description 1
Images















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62K—CYCLES; CYCLE FRAMES; CYCLE STEERING DEVICES; RIDER-OPERATED TERMINAL CONTROLS SPECIALLY ADAPTED FOR CYCLES; CYCLE AXLE SUSPENSIONS; CYCLE SIDE-CARS, FORECARS, OR THE LIKE
- B62K25/00—Axle suspensions
- B62K25/04—Axle suspensions for mounting axles resiliently on cycle frame or fork
- B62K25/28—Axle suspensions for mounting axles resiliently on cycle frame or fork with pivoted chain-stay
- B62K25/283—Axle suspensions for mounting axles resiliently on cycle frame or fork with pivoted chain-stay for cycles without a pedal crank, e.g. motorcycles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/018—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the use of a specific signal treatment or control method
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/02—Spring characteristics, e.g. mechanical springs and mechanical adjusting means
- B60G17/027—Mechanical springs regulated by fluid means
- B60G17/0272—Mechanical springs regulated by fluid means the mechanical spring being a coil spring
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/02—Spring characteristics, e.g. mechanical springs and mechanical adjusting means
- B60G17/04—Spring characteristics, e.g. mechanical springs and mechanical adjusting means fluid spring characteristics
- B60G17/044—Self-pumping fluid springs
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16F—SPRINGS; SHOCK-ABSORBERS; MEANS FOR DAMPING VIBRATION
- F16F9/00—Springs, vibration-dampers, shock-absorbers, or similarly-constructed movement-dampers using a fluid or the equivalent as damping medium
- F16F9/32—Details
- F16F9/56—Means for adjusting the length of, or for locking, the spring or damper, e.g. at the end of the stroke
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2204/00—Indexing codes related to suspensions per se or to auxiliary parts
- B60G2204/10—Mounting of suspension elements
- B60G2204/20—Mounting of accessories, e.g. pump, compressor
- B60G2204/202—Mounting of accessories, e.g. pump, compressor of cables
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2204/00—Indexing codes related to suspensions per se or to auxiliary parts
- B60G2204/62—Adjustable continuously, e.g. during driving
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2206/00—Indexing codes related to the manufacturing of suspensions: constructional features, the materials used, procedures or tools
- B60G2206/01—Constructional features of suspension elements, e.g. arms, dampers, springs
- B60G2206/40—Constructional features of dampers and/or springs
- B60G2206/41—Dampers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2300/00—Indexing codes relating to the type of vehicle
- B60G2300/12—Cycles; Motorcycles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2400/00—Indexing codes relating to detected, measured or calculated conditions or factors
- B60G2400/60—Load
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2500/00—Indexing codes relating to the regulated action or device
- B60G2500/30—Height or ground clearance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2600/00—Indexing codes relating to particular elements, systems or processes used on suspension systems or suspension control systems
- B60G2600/20—Manual control or setting means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2600/00—Indexing codes relating to particular elements, systems or processes used on suspension systems or suspension control systems
- B60G2600/22—Magnetic elements
- B60G2600/26—Electromagnets; Solenoids
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2800/00—Indexing codes relating to the type of movement or to the condition of the vehicle and to the end result to be achieved by the control action
- B60G2800/90—System Controller type
- B60G2800/91—Suspension Control
- B60G2800/914—Height Control System
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62K—CYCLES; CYCLE FRAMES; CYCLE STEERING DEVICES; RIDER-OPERATED TERMINAL CONTROLS SPECIALLY ADAPTED FOR CYCLES; CYCLE AXLE SUSPENSIONS; CYCLE SIDE-CARS, FORECARS, OR THE LIKE
- B62K25/00—Axle suspensions
- B62K25/04—Axle suspensions for mounting axles resiliently on cycle frame or fork
- B62K2025/044—Suspensions with automatic adjustment
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62K—CYCLES; CYCLE FRAMES; CYCLE STEERING DEVICES; RIDER-OPERATED TERMINAL CONTROLS SPECIALLY ADAPTED FOR CYCLES; CYCLE AXLE SUSPENSIONS; CYCLE SIDE-CARS, FORECARS, OR THE LIKE
- B62K25/00—Axle suspensions
- B62K25/04—Axle suspensions for mounting axles resiliently on cycle frame or fork
- B62K2025/045—Suspensions with ride-height adjustment
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62K—CYCLES; CYCLE FRAMES; CYCLE STEERING DEVICES; RIDER-OPERATED TERMINAL CONTROLS SPECIALLY ADAPTED FOR CYCLES; CYCLE AXLE SUSPENSIONS; CYCLE SIDE-CARS, FORECARS, OR THE LIKE
- B62K2201/00—Springs used in cycle frames or parts thereof
- B62K2201/08—Fluid springs
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S280/00—Land vehicles
- Y10S280/01—Load responsive, leveling of vehicle
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Vehicle Body Suspensions (AREA)
- Axle Suspensions And Sidecars For Cycles (AREA)
- Fluid-Damping Devices (AREA)
Description
そして、例えば、特許文献1に記載の車高調整装置は以下のように構成されている。すなわち、自動二輪車の車体フレームの後部に枢支されたリヤアームの後端において後輪が車軸を介して軸支されている。油圧緩衝装置がリヤアームと車体フレームとの間にリンク機構を介して配置されている。油圧緩衝装置は油圧減衰器と緩衝ばねとを有する。シリンダの頭部開口に蓋体が嵌着されており、この蓋体がシリンダの取付ブラケットを兼ねている。支持筒は、シリンダの周囲に遊嵌した状態で蓋体に固定されている。また、筒状のばね座はシリンダおよび支持筒に摺動自在に嵌挿されている。このばね座は、ピストン杆のブラケットの反対側において緩衝ばねを支えるものである。作動油室は、支持筒の内側に形成されており、この作動油室内の油圧を変化させることにより、ばね座を緩衝ばねに抗して押し下げて油圧減衰器を伸長させてリヤアームとフレームとの間隔を増大させ、車高を高くする。
本発明は、車両に加わる重量にかかわらず車高を所望の高さにすることができる車高調整装置を提供することを目的とする。
図1は、実施の形態に係る自動二輪車1の概略構成を示す図である。
自動二輪車1は、図1に示すように、車体フレーム11と、この車体フレーム11の前端部に取り付けられているヘッドパイプ12と、このヘッドパイプ12に設けられた2つのフロントフォーク13と、この2つのフロントフォーク13の下端に取り付けられた前輪14と、を有している。2つのフロントフォーク13は、前輪14の左側と右側にそれぞれ1つずつ配置されている。図1では、右側に配置されたフロントフォーク13のみを示している。このフロントフォーク13の具体的構成については後で詳述する。
また、自動二輪車1は、フロントフォーク13の上部に取り付けられたハンドル15と、車体フレーム11の前上部に取り付けられた燃料タンク16と、この燃料タンク16の下方に配置されたエンジン17および変速機18と、を有している。
また、自動二輪車1は、フロントフォーク13の後述する前輪側電磁弁270およびリヤサスペンション22の後述する後輪側電磁弁170の開度を制御する制御手段の一例としての制御装置50を備えている。制御装置50は、後述する前輪側電磁弁270および後輪側電磁弁170の開度を制御することで自動二輪車1の車高を制御する。制御装置50には、上述した前輪回転検出センサ31、後輪回転検出センサ32、荷重検出センサ33などからの出力信号が入力される。
図2は、リヤサスペンション22の断面図である。
リヤサスペンション22は、自動二輪車1の車両本体の一例としての車体フレーム11と後輪21との間に取り付けられている。そして、リヤサスペンション22は、自動二輪車1の車重を支えて衝撃を吸収するスプリングの一例としての後輪側懸架スプリング110と、後輪側懸架スプリング110の振動を減衰するダンパの一例としての後輪側ダンパ120と、を備えている。また、リヤサスペンション22は、後輪側懸架スプリング110のバネ力を調整することで車体フレーム11と後輪21との相対的な位置である後輪側相対位置を変更可能な後輪側相対位置変更装置140と、この後輪側相対位置変更装置140に液体を供給する後輪側液体供給装置160と、を備えている。また、リヤサスペンション22は、このリヤサスペンション22を車体フレーム11に取り付けるための車体側取付部材184と、リヤサスペンション22を後輪21に取り付けるための車軸側取付部材185と、車軸側取付部材185に取り付けられて後輪側懸架スプリング110における中心線方向の一方の端部(図2においては下部)を支持するばね受け190と、を備えている。リヤサスペンション22は、車体フレーム11と車輪の一例としての後輪21との相対的な位置を変更可能な変更手段、および後輪側変更手段の一例として機能する。
後輪側液体供給装置160は、後輪側ダンパ120の上蓋124に中心線方向に延びるように固定された円筒状のパイプ161を有している。パイプ161は、円筒状のピストンロッド127の内部であるポンプ室162内に同軸的に挿入されている。
以上のように構成された後輪側液体供給装置160は、自動二輪車1が走行してリヤサスペンション22が路面の凹凸により力を受けると、ピストンロッド127がシリンダ125およびパイプ161に進退する伸縮動によりポンピング動作する。このポンピング動作により、ポンプ室162が加圧されると、ポンプ室162内の液体が吐出用チェック弁163を開いて後輪側相対位置変更装置140のジャッキ室142側へ吐出され(図3(a)参照)、ポンプ室162が負圧になると、シリンダ125の第2油室132内の液体が吸込用チェック弁164を開いてポンプ室162に吸い込まれる(図3(b)参照)。
後輪側電磁弁170が全開状態から少しでも閉じた状態のときに、後輪側液体供給装置160によりジャッキ室142内に液体が供給されるとジャッキ室142内に液体が充填され、支持部材141が油圧ジャッキ143に対して中心線方向の一方の端部側(図4(a)では下側)に移動し、後輪側懸架スプリング110のバネ長が短くなる(図4(a)参照)。他方、後輪側電磁弁170が全開になるとジャッキ室142内の液体は液体溜室143aに排出され、支持部材141が油圧ジャッキ143に対して中心線方向の他方の端部側(図4(b)では上側)に移動し、後輪側懸架スプリング110のバネ長が長くなる(図4(b)参照)。
なお、後輪側電磁弁170は、制御装置50によりその開度が制御される。
また、後輪側電磁弁170が開いたときに、ジャッキ室142に供給された液体を排出する先は、シリンダ125内の第1油室131および/または第2油室132であってもよい。
図5は、車高が維持されるメカニズムを示す図である。
戻し路121aにより、後輪側電磁弁170が全閉しているときにジャッキ室142内に液体が供給され続けても、供給された液体がシリンダ125内に戻されるので油圧ジャッキ143に対する支持部材141の位置、ひいてはシート19の高さ(車高)が維持される。
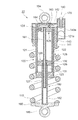
図6は、フロントフォーク13の断面図である。
フロントフォーク13は、車体フレーム11と前輪14との間に取り付けられている。そして、フロントフォーク13は、自動二輪車1の車重を支えて衝撃を吸収する前輪側懸架スプリング210と、前輪側懸架スプリング210の振動を減衰する前輪側ダンパ220と、を備えている。また、フロントフォーク13は、前輪側懸架スプリング210のバネ力を調整することで車体フレーム11と前輪14との相対的な位置である前輪側相対位置を変更可能な前輪側相対位置変更装置240と、この前輪側相対位置変更装置240に液体を供給する前輪側液体供給装置260と、を備えている。また、フロントフォーク13は、このフロントフォーク13を前輪14に取り付けるための車軸側取付部285と、フロントフォーク13をヘッドパイプ12に取り付けるためのヘッドパイプ側取付部(不図示)と、を備えている。フロントフォーク13は、車体フレーム11と前輪14との相対的な位置を変更する変更手段の一例として機能する。フロントフォーク13は、車体フレーム11と車輪の一例としての前輪14との相対的な位置を変更可能な変更手段、および前輪側変更手段の一例として機能する。
また、前輪側ダンパ220は、内シリンダ222における中心線方向の一方の端部側(図6では下部側)に固定されるとともに、ピストンロッド227の円筒状部227aの外周に対して摺動可能なピストン226を備えている。ピストン226は、ピストンロッド227の円筒状部227aの外周面に接触し、シリンダ225内の液体(本実施の形態においてはオイル)が封入された空間を、ピストン226よりも中心線方向の一方の端部側の第1油室231と、ピストン226よりも中心線方向の他方の端部側の第2油室232とに区分する。なお、本実施の形態においてはオイルが作動油の一例として機能する。
前輪側液体供給装置260は、前輪側ダンパ220の覆い部材230に中心線方向に延びるように固定された円筒状のパイプ261を有している。パイプ261は、後述する前輪側相対位置変更装置240の支持部材241の下側円筒状部241aの内部であるポンプ室262内に同軸的に挿入されている。
以上のように構成された前輪側液体供給装置260は、自動二輪車1が走行してフロントフォーク13が路面の凹凸により力を受けて、ピストンロッド227が内シリンダ222に進退すると、パイプ261が前輪側相対位置変更装置240の支持部材241に進退することによりポンピング動作する。このポンピング動作により、ポンプ室262が加圧されると、ポンプ室262内の液体が吐出用チェック弁263を開いて前輪側相対位置変更装置240のジャッキ室242側へ吐出され(図7(a)参照)、ポンプ室262が負圧になると、油溜室233内の液体が吸込用チェック弁264を開いてポンプ室262に吸い込まれる(図7(b)参照)。
前輪側電磁弁270が全開状態から少しでも閉じた状態のときに、前輪側液体供給装置260によりジャッキ室242内に液体が供給されるとジャッキ室242内に液体が充填され、支持部材241が油圧ジャッキ243に対して中心線方向の一方の端部側(図8(a)では下側)に移動し、前輪側懸架スプリング210のバネ長が短くなる(図8(a)参照)。他方、前輪側電磁弁270が全開になるとジャッキ室242内の液体は油溜室233に排出され、支持部材241が油圧ジャッキ243に対して中心線方向の他方の端部側(図8(b)では上側)に移動し、前輪側懸架スプリング210のバネ長が長くなる(図8(b)参照)。
なお、前輪側電磁弁270は、制御装置50によりその開度が制御される。
また、前輪側電磁弁270が開いたときに、ジャッキ室242に供給された液体を排出する先は、第1油室231および/または第2油室232であってもよい。
油圧ジャッキ243の外周面には、図9に示すように、支持部材241が油圧ジャッキ243に対して中心線方向の一方の端部側(図8(a)および図8(b)では下側)に予め定められた限界位置まで移動したときに、ジャッキ室242内の液体を油溜室233内まで戻す戻し路(不図示)が形成されている。
戻し路により、前輪側電磁弁270が閉弁しているときにジャッキ室242内に液体が供給され続けても、供給された液体が油溜室233内に戻されるので油圧ジャッキ243に対する支持部材241の位置、ひいてはシート19の高さ(車高)が維持される。
図10(a)は、前輪側電磁弁270の概略構成を示す図であり、図10(b)は、後輪側電磁弁170の概略構成を示す図である。
前輪側電磁弁270は、いわゆるノーマルオープンタイプの電磁弁であり、図10(a)に示すように、コイル271を巻いたボビン272と、ボビン272の中空部272aに固定された棒状の固定鉄心273と、コイル271とボビン272と固定鉄心273を支持するホルダ274と、固定鉄心273の先端(端面)に対応して配置され、固定鉄心273に吸引される略円板状の可動鉄心275と、を備えている。また、前輪側電磁弁270は、可動鉄心275の先端中央に固定された弁体276と、ホルダ274と組み合わされるボディ277と、ボディ277に形成され、弁体276が配置される弁室278と、ボディ277に形成された開口部を覆うとともにボディ277と協働して弁室278を形成する覆い部材279と、弁体276と覆い部材279との間に配置されたコイルスプリング280と、を備えている。また、前輪側電磁弁270は、ボディ277に形成され、弁体276に対応して弁室278に配置された弁座281と、ボディ277に形成され、ジャッキ室242(図9参照)から弁室278に流体を導入する導入流路282と、ボディ277に形成され、弁室278から弁座281を経由して油溜室233の方へ流体を導出する導出流路283と、を備えている。なお、前輪側電磁弁270は、ノーマルクローズタイプの電磁弁であってもよい。
図11は、制御装置50のブロック図である。
制御装置50は、CPUと、CPUにて実行されるプログラムや各種データ等が記憶されたROMと、CPUの作業用メモリ等として用いられるRAMと、不揮発性メモリであるEEPROMと、を備えている。制御装置50には、上述した前輪回転検出センサ31、後輪回転検出センサ32、前輪側相対位置検出部295および後輪側相対位置検出部195などからの出力信号が入力される。
これら前輪回転速度演算部51、後輪回転速度演算部52、前輪側移動量把握部53、後輪側移動量把握部54、車速把握部56および電磁弁制御部57は、CPUがROMなどの記憶領域に記憶されたソフトウェアを実行することにより実現される。
図12は、本実施の形態に係る電磁弁制御部57のブロック図である。
電磁弁制御部57は、前輪側移動量Lfの目標移動量である前輪側目標移動量を決定する前輪側目標移動量決定部571と、後輪側移動量Lrの目標移動量である後輪側目標移動量を決定する後輪側目標移動量決定部572と、車両の一例としての自動二輪車1に加わる重量を把握する重量把握部575と、を有する目標移動量決定部570を備えている。また、電磁弁制御部57は、前輪側相対位置変更装置240の前輪側電磁弁270および後輪側相対位置変更装置140の後輪側電磁弁170に供給する目標電流を決定する目標電流決定部510と、目標電流決定部510が決定した目標電流に基づいてフィードバック制御などを行う制御部520とを備えている。
重量把握部575は、自動二輪車1に設けられた入力装置34に入力された重量に基づいて自動二輪車1に加わる重量を把握する。
図13は、入力装置34の外観図である。
入力装置34は、例えば、図13に示すように、周囲に重量が記載された、所謂ダイヤル式の装置であり、ユーザがつまみを回転させることにより、自動二輪車1に加わる重量を選択できるように構成されている。運転者は、自動二輪車1に乗る人の体重や自動二輪車1で搬送する物の重さを考慮して、自動二輪車1に加わる重量を推定し、その重量を入力装置34で選択する。重量把握部575は、入力装置34で選択された重量が自動二輪車1に加わる重量であると把握する。なお、この入力装置34は、例えばスピードメータの近傍に設けるとよい。
図15(a)は、自動二輪車1に加わる重量と前輪側目標移動量Lf0との関係を示す図である。図15(b)は、自動二輪車1に加わる重量と後輪側目標移動量Lr0との関係を示す図である。
目標移動量決定部570は、自動二輪車1が走行開始後、車速把握部56が把握した車速Vcが予め定められた上昇車速Vuよりも小さいときには目標移動量を零に決定し、車速Vcが上昇車速Vuより小さい状態から上昇車速Vu以上となった場合には、目標移動量を、重量把握部575が把握した自動二輪車1に加わる重量に応じて予め定められた値に決定する。より具体的には、前輪側目標移動量決定部571は、図14(a)に示すように、車速Vcが上昇車速Vuより小さい状態から上昇車速Vu以上となった場合には、前輪側目標移動量を、自動二輪車1に加わる重量に応じて図15(a)に示すように予め定められた前輪側目標移動量Lf0に決定する。他方、後輪側目標移動量決定部572は、図14(b)に示すように、車速Vcが上昇車速Vuより小さい状態から上昇車速Vu以上となった場合には、後輪側目標移動量を、自動二輪車1に加わる重量に応じて図15(b)に示すように予め定められた後輪側目標移動量Lr0に決定する。以降、車速把握部56が把握した車速Vcが上昇車速Vu以上である間は、前輪側目標移動量決定部571,後輪側目標移動量決定部572は、前輪側目標移動量,後輪側目標移動量を、前輪側目標移動量Lf0,後輪側目標移動量Lr0に決定する。入力装置34の選択位置と自動二輪車1に加わる重量との関係、および図15(a),図15(b)に示すような自動二輪車1に加わる重量と前輪側目標移動量Lf0,後輪側目標移動量Lr0との関係は、予めROMに記憶しておく。前輪側移動量Lfと後輪側移動量Lrとに応じて自動二輪車1の車高が定まることから、車高が予め定められた所望の車高となるように、自動二輪車1に加わる重量(入力装置34の選択位置)に応じて前輪側目標移動量Lf0,後輪側目標移動量Lr0を予め定め、ROMに記憶しておくことを例示することができる。
また、目標移動量決定部570は、車速把握部56が把握した車速Vcが下降車速Vdよりも大きい場合であっても、急ブレーキなどで自動二輪車1が急減速した場合には、目標移動量を零に決定する。つまり、前輪側目標移動量決定部571,後輪側目標移動量決定部572は、前輪側目標移動量,後輪側目標移動量を零に決定する。自動二輪車1が急減速したかどうかは、車速把握部56が把握した車速Vcの単位時間当たりの減少量が予め定められた値以下であるか否かで把握することができる。
前輪側目標電流決定部511は、例えば、予め経験則に基づいて作成しROMに記憶しておいた、前輪側目標移動量と前輪側目標電流との対応を示すマップに、前輪側目標移動量決定部571が決定した前輪側目標移動量を代入することにより前輪側目標電流を決定する。
後輪側目標電流決定部512は、例えば、予め経験則に基づいて作成しROMに記憶しておいた、後輪側目標移動量と後輪側目標電流との対応を示すマップに、後輪側目標移動量決定部572が決定した後輪側目標移動量を代入することにより後輪側目標電流を決定する。
後輪側作動制御部540は、後輪側目標電流決定部512が決定した後輪側目標電流と、後輪側検出部544が検出した実際の電流(後輪側実電流)との偏差に基づいてフィードバック制御を行う後輪側フィードバック(F/B)制御部541と、後輪側電磁弁170をPWM制御する後輪側PWM制御部542とを有している。
前輪側検出部534は、前輪側電磁弁駆動部533に接続されたシャント抵抗の両端に生じる電圧から前輪側電磁弁270に流れる実電流の値を検出する。後輪側検出部544は、後輪側電磁弁駆動部543に接続されたシャント抵抗の両端に生じる電圧から後輪側電磁弁170に流れる実電流の値を検出する。
図16(a)には、前輪側目標移動量Lf0の最高の目標移動量と最低の目標移動量とを記載し、図16(b)には、後輪側目標移動量Lr0の最高の目標移動量と最低の目標移動量とを記載している。図16(a),図16(b)に示した前輪側目標移動量Lf0の最高の目標移動量,後輪側目標移動量Lr0の最高の目標移動量は、図15(a),図15(b)に記載した前輪側目標移動量Lf0,後輪側目標移動量Lr0に相当する移動量である。
上述した実施の形態においては、入力装置34として、所謂ダイヤル式の装置を用いているが特にかかる態様に限定されない。ユーザが自動二輪車1に加わる重量を選択できるのであれば、入力装置34は、例えば、つまみを直線的に移動させるレバー式の装置、該当する重量のボタンを押すスイッチ式の装置、画面上の表示を押すことで重量を入力するタッチパネルであってもよい。
上述した実施の形態においては、重量把握部575は、自動二輪車1に設けられた入力装置34に入力された重量に基づいて自動二輪車1に加わる重量を把握するが特にかかる態様に限定されない。
例えば、自動二輪車1のシート19の内部に重量センサを設け、重量把握部575は、この重量センサが検出した重量に基づいて自動二輪車1に加わる重量を把握してもよい。重量把握部575は、車速Vcが車高を高め始める前の上昇車速Vu未満である場合の重量センサの検出値に基づいて自動二輪車1に加わる重量を把握することを例示することができる。
また、重量把握部575は、例えば、車高を高めていない状態から高め始めた後の所定期間経過後の前輪側移動量Lfおよび後輪側移動量Lrに基づく移動量の変化速度を基に自動二輪車1に加わる重量を把握してもよい。
重量把握部575は、自動二輪車1のエンジン17が停止されている場合など制御装置50に電力が供給されていない場合には、起動中に把握した自動二輪車1に加わる重量をEEPROM等に格納しておき、次回起動時に格納した重量を読み込んでもよい。
図15(a),図15(b)、図16(a),図16(b)に示したようにROMに記憶しておく、自動二輪車1に加わる重量と目標移動量との相関関係に対して、フロントフォーク13およびリヤサスペンション22を自動二輪車1に取り付けた後に、自動二輪車1に合わせてオフセット補正してもよい。これにより、フロントフォーク13およびリヤサスペンション22毎のばらつきを補正することができる。
Claims (1)
- 車両の車両本体と車輪との間に配置されたスプリングと、
伸縮動作に伴う作動油の移動により前記スプリングの振動を減衰するダンパと、
前記スプリングの一方の端部を支持するとともに前記ダンパに対して移動することで当該スプリングの長さを変える支持部材と、
前記ダンパに対して前記支持部材を移動させる作動油が当該ダンパの伸縮動作に伴って流入する作動油室と、
前記作動油室に流入する作動油の量を開度によって調整する電磁弁と、
前記車両に加わる重量に応じて前記電磁弁の開度を制御する制御手段と、
を備えており、
前記制御手段は、前記車両に加わる重量が大きくなるに従って前記作動油室に流入する作動油の量の上限および下限を大きくする
ことを特徴とする車高調整装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014036448A JP6180964B2 (ja) | 2014-02-27 | 2014-02-27 | 車高調整装置 |
| US14/461,804 US9114846B1 (en) | 2014-02-27 | 2014-08-18 | Vehicle height adjustment apparatus |
| EP14182630.5A EP2913209B1 (en) | 2014-02-27 | 2014-08-28 | Vehicle height adjustment apparatus |
| CN201410433178.5A CN104875834B (zh) | 2014-02-27 | 2014-08-28 | 车辆高度调节设备 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014036448A JP6180964B2 (ja) | 2014-02-27 | 2014-02-27 | 車高調整装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015160501A JP2015160501A (ja) | 2015-09-07 |
| JP6180964B2 true JP6180964B2 (ja) | 2017-08-16 |
Family
ID=51417194
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014036448A Active JP6180964B2 (ja) | 2014-02-27 | 2014-02-27 | 車高調整装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9114846B1 (ja) |
| EP (1) | EP2913209B1 (ja) |
| JP (1) | JP6180964B2 (ja) |
| CN (1) | CN104875834B (ja) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9108484B2 (en) * | 2013-07-25 | 2015-08-18 | Tenneco Automotive Operating Company Inc. | Recuperating passive and active suspension |
| CN103738136B (zh) * | 2014-01-27 | 2017-02-15 | 徐州重型机械有限公司 | 独立悬架系统及具有该独立悬架系统的起重机 |
| DE102014207055B4 (de) * | 2014-03-04 | 2016-05-12 | Zf Friedrichshafen Ag | Schwingungsdämpfer mit Niveauregulierung |
| US9682602B2 (en) * | 2015-01-26 | 2017-06-20 | Showa Corporation | Control apparatus for damping force varying damper and damping force varying damper system |
| US10434835B2 (en) | 2016-02-24 | 2019-10-08 | Tenneco Automotive Operating Company Inc. | Monotube active suspension system having different system layouts for controlling pump flow distribution |
| JP6681767B2 (ja) * | 2016-03-31 | 2020-04-15 | 株式会社ショーワ | 車高調整装置 |
| JP6571579B2 (ja) * | 2016-03-31 | 2019-09-04 | 株式会社ショーワ | 流路制御装置、車高調整装置 |
| JP2018140746A (ja) * | 2017-02-28 | 2018-09-13 | ヤマハ発動機株式会社 | 鞍乗型車両およびその組立方法 |
| JP6181335B1 (ja) * | 2017-03-06 | 2017-08-16 | 株式会社ショーワ | 車高調整装置 |
| JP6145589B1 (ja) * | 2017-03-06 | 2017-06-14 | 株式会社ショーワ | 車高調整装置 |
| DE102017209622A1 (de) * | 2017-06-08 | 2018-12-13 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum fahrerunabhängigen Anheben oder Absenken des Fahrwerks eines einspurigen Kraftfahrzeugs |
| CN109383210A (zh) * | 2017-08-03 | 2019-02-26 | 北京凌云智能科技有限公司 | 空气悬架、空气悬架两轮车及其启停控制方法 |
| JP6901516B2 (ja) * | 2019-04-15 | 2021-07-14 | 本田技研工業株式会社 | 車両用サスペンション |
| DE102019212908A1 (de) * | 2019-08-28 | 2021-03-04 | Thyssenkrupp Ag | Schwingungsdämpfer mit verstellbarer Dämpfkraft |
| US11718137B2 (en) * | 2020-02-27 | 2023-08-08 | Fox Factory, Inc. | Shock assembly with automatically adjustable ride height |
| US11840120B2 (en) * | 2020-02-27 | 2023-12-12 | Fox Factory, Inc. | IFP shock with automatically adjustable ride height |
| CN111720486B (zh) * | 2020-07-02 | 2022-02-25 | 长安大学 | 一种基于液压原理的抗冲击消振支座及工作方法 |
| US11872862B2 (en) * | 2022-02-04 | 2024-01-16 | GM Global Technology Operations LLC | Automatic corner weight adjustment of vehicle with automated spring seats |
Family Cites Families (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB1478016A (en) * | 1973-07-27 | 1977-06-29 | Woodhead Ltd J | Levelling suspension strut for a vehicle |
| JPS54136026A (en) * | 1978-04-07 | 1979-10-22 | Kayaba Ind Co Ltd | Body suspension system |
| GB2068080B (en) * | 1979-12-17 | 1984-05-10 | Honda Motor Co Ltd | Vehicle suspension unit |
| DE3433918C1 (de) * | 1984-09-15 | 1986-03-13 | Boge Gmbh, 5208 Eitorf | Selbstpumpendes,hoehenverstellbares Federbein fuer Fahrzeuge |
| JPH0822680B2 (ja) | 1985-04-11 | 1996-03-06 | ヤマハ発動機株式会社 | 車両の車高調整装置 |
| JPH0694253B2 (ja) * | 1986-03-17 | 1994-11-24 | トヨタ自動車株式会社 | 車輌用ロ−ル制御装置 |
| JPS63134321A (ja) * | 1986-11-25 | 1988-06-06 | Nippon Denso Co Ltd | 車両用姿勢検出装置 |
| JPS63180510A (ja) * | 1987-01-21 | 1988-07-25 | Toyota Motor Corp | スタビライザ制御装置 |
| US5009451A (en) * | 1988-07-19 | 1991-04-23 | Kabushiki Kaisha Showa Seisakusho | Shock absorber for use in a vehicle |
| US5211420A (en) * | 1988-09-16 | 1993-05-18 | Honda Giken Kogyo Kabushiki Kaisha | Adjustable height suspension mechanism for two-wheeled motor vehicles |
| EP0553901B1 (en) * | 1989-11-10 | 1996-05-01 | Suzuki Kabushiki Kaisha | Motorcycle having body height adjusting mechanism |
| DE4403467C2 (de) * | 1994-02-04 | 1998-10-29 | Daimler Benz Ag | Niveauregulierung eines luftgefederten Lastfahrzeuges während eines Be- und Entladebetriebs |
| NL9402150A (nl) * | 1994-12-19 | 1996-08-01 | Koni Bv | Continu variabele twee-pijpsschokdemper. |
| JP3692650B2 (ja) * | 1996-09-19 | 2005-09-07 | マツダ株式会社 | 車高調整装置 |
| JPH10338017A (ja) * | 1997-04-11 | 1998-12-22 | Tokico Ltd | シリンダ装置および車高調整装置 |
| JP3646499B2 (ja) * | 1998-01-16 | 2005-05-11 | トヨタ自動車株式会社 | 車高調整装置 |
| DE19849222B4 (de) * | 1998-10-26 | 2004-02-12 | Zf Sachs Ag | Selbstpumpendes hydropneumatisches Federbein mit innerer Niveauregelung |
| JP4648126B2 (ja) * | 2005-08-05 | 2011-03-09 | 本田技研工業株式会社 | 車両用サスペンション装置 |
| JP4839196B2 (ja) * | 2006-03-28 | 2011-12-21 | カヤバ工業株式会社 | 車高調整装置 |
| JP4800172B2 (ja) * | 2006-10-11 | 2011-10-26 | ヤマハ発動機株式会社 | 自動二輪車 |
| KR100977191B1 (ko) * | 2010-02-22 | 2010-08-23 | 주식회사 케이. 아이. 씨 | 감쇠력 조절가능한 쇽업쇼바 |
| US20110227301A1 (en) * | 2010-03-16 | 2011-09-22 | Showa Corporation | Vehicle Height Adjusting Apparatus |
| JP2014094602A (ja) | 2012-11-07 | 2014-05-22 | Showa Corp | 車高調整装置 |
| JP2014148205A (ja) * | 2013-01-31 | 2014-08-21 | Showa Corp | 車高調整装置 |
| JP6067455B2 (ja) * | 2013-03-28 | 2017-01-25 | 株式会社ショーワ | 自動二輪車の車高調整装置 |
-
2014
- 2014-02-27 JP JP2014036448A patent/JP6180964B2/ja active Active
- 2014-08-18 US US14/461,804 patent/US9114846B1/en active Active
- 2014-08-28 EP EP14182630.5A patent/EP2913209B1/en active Active
- 2014-08-28 CN CN201410433178.5A patent/CN104875834B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US9114846B1 (en) | 2015-08-25 |
| EP2913209A3 (en) | 2016-06-15 |
| EP2913209B1 (en) | 2018-05-09 |
| CN104875834B (zh) | 2018-09-25 |
| US20150239526A1 (en) | 2015-08-27 |
| JP2015160501A (ja) | 2015-09-07 |
| CN104875834A (zh) | 2015-09-02 |
| EP2913209A2 (en) | 2015-09-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6180964B2 (ja) | 車高調整装置 | |
| JP5938057B2 (ja) | 車高調整装置、車高調整装置用の制御装置およびプログラム | |
| JP6193158B2 (ja) | 車高調整装置、車高調整方法 | |
| JP6152326B2 (ja) | 車高調整装置 | |
| JP5947320B2 (ja) | 車高調整装置、車高調整方法 | |
| JP6681767B2 (ja) | 車高調整装置 | |
| JP6181335B1 (ja) | 車高調整装置 | |
| JP6145589B1 (ja) | 車高調整装置 | |
| JP6234862B2 (ja) | 懸架装置および車高調整装置 | |
| JP6180865B2 (ja) | 車高調整装置、車高調整方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160829 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170419 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170425 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170621 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170704 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170719 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6180964 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |