JP6165385B1 - 誘導電動機の回転子及び誘導電動機 - Google Patents
誘導電動機の回転子及び誘導電動機 Download PDFInfo
- Publication number
- JP6165385B1 JP6165385B1 JP2017512400A JP2017512400A JP6165385B1 JP 6165385 B1 JP6165385 B1 JP 6165385B1 JP 2017512400 A JP2017512400 A JP 2017512400A JP 2017512400 A JP2017512400 A JP 2017512400A JP 6165385 B1 JP6165385 B1 JP 6165385B1
- Authority
- JP
- Japan
- Prior art keywords
- rotor
- end ring
- groove
- reinforcing member
- protrusion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000006698 induction Effects 0.000 title claims abstract description 38
- 230000003014 reinforcing effect Effects 0.000 claims abstract description 136
- 230000002093 peripheral effect Effects 0.000 claims abstract description 89
- 230000004048 modification Effects 0.000 description 35
- 238000012986 modification Methods 0.000 description 35
- 239000004020 conductor Substances 0.000 description 15
- 230000000694 effects Effects 0.000 description 11
- 239000000463 material Substances 0.000 description 10
- 238000010586 diagram Methods 0.000 description 7
- 230000008602 contraction Effects 0.000 description 6
- 238000004512 die casting Methods 0.000 description 6
- 230000000052 comparative effect Effects 0.000 description 5
- 230000002787 reinforcement Effects 0.000 description 4
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 229910000831 Steel Inorganic materials 0.000 description 2
- 238000010030 laminating Methods 0.000 description 2
- 229910052751 metal Inorganic materials 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 239000010959 steel Substances 0.000 description 2
- 238000003466 welding Methods 0.000 description 2
- 229910000838 Al alloy Inorganic materials 0.000 description 1
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- 229910000881 Cu alloy Inorganic materials 0.000 description 1
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 239000004918 carbon fiber reinforced polymer Substances 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 239000010949 copper Substances 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 238000000465 moulding Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000007480 spreading Effects 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
- 239000010936 titanium Substances 0.000 description 1
- 229910052719 titanium Inorganic materials 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
Images


























Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K17/00—Asynchronous induction motors; Asynchronous induction generators
- H02K17/02—Asynchronous induction motors
- H02K17/16—Asynchronous induction motors having rotors with internally short-circuited windings, e.g. cage rotors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K17/00—Asynchronous induction motors; Asynchronous induction generators
- H02K17/02—Asynchronous induction motors
- H02K17/16—Asynchronous induction motors having rotors with internally short-circuited windings, e.g. cage rotors
- H02K17/168—Asynchronous induction motors having rotors with internally short-circuited windings, e.g. cage rotors having single-cage rotors
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Induction Machinery (AREA)
- Iron Core Of Rotating Electric Machines (AREA)
Abstract
Description
図1は本発明の実施の形態1に係る誘導電動機の断面図である。図2は本発明の実施の形態1に係る誘導電動機の回転子の断面図である。図3は図2に示すIII−III矢視断面図である。図4は図2に示すエンドリングの斜視図である。図5は図2に示す補強部材の斜視図である。
(1)回転子100Aは、図2に示すエンドリング3−1,3−2の代わりにエンドリング3−1A,3−2Aを備える。エンドリング3−1A,3−2Aの内周部3aには、図2に示す第1の突起部3bが設けられていない。
(2)回転子100Aは、図2に示す補強部材4−1,4−2の代わりに補強部材4−1A,4−2Aを備える。補強部材4−1A,4−2Aの外周部4aには、図2に示す第1の溝部4bが設けられていない。
図9は本発明の実施の形態2に係る誘導電動機の回転子の断面図である。実施の形態1に係る回転子100−1と実施の形態2に係る回転子100−2との相違点は以下の通りである。
(1)回転子100−2は、エンドリング3−1,3−2のそれぞれが複数の第1の突起部3bを備える。エンドリング3−1が備える複数の第1の突起部3bは、軸線方向D1に互いに離れてエンドリング3−1の内周部3aに設けられる。エンドリング3−2が備える複数の第1の突起部3bは、軸線方向D1に互いに離れてエンドリング3−2の内周部3aに設けられる。
(2)回転子100−2は、補強部材4−1,4−2のそれぞれが複数の第1の溝部4bを備える。補強部材4−1が備える複数の第1の溝部4bは、軸線方向D1に互いに離れて補強部材4−1の外周部4aに設けられる。補強部材4−2が備える複数の第1の溝部4bは、軸線方向D1に互いに離れて補強部材4−2の外周部4aに設けられる。
図10は本発明の実施の形態3に係る誘導電動機の回転子の断面図である。実施の形態1に係る回転子100−1と実施の形態3に係る回転子100−3との相違点は以下の通りである。
(1)回転子100−3の第1の突起部3bには、第1の突起部3bの内周部3a1に環状の第2の突起部3b1が設けられる。
(2)回転子100−3の第1の溝部4bには、第1の溝部4bの外周部4a1に環状の第2の溝部4b1が設けられる。
図11は本発明の実施の形態4に係る誘導電動機の回転子の断面図である。実施の形態1に係る回転子100−1と実施の形態4に係る回転子100−4との相違点は以下の通りである。
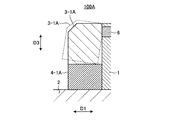
(1)回転子100−4の補強部材4−1,4−2は、それぞれの外周部4aの内、第1の溝部4bよりも回転子鉄心1側の外周部4a2の外径寸法OD1が、第1の溝部4bよりも回転子鉄心1とは反対側の外周部4a3の外径寸法OD2よりも大きい。外周部4a2の軸線方向D1における幅は、外周部4a3の軸線方向D1における幅と等しい。
図12は本発明の実施の形態5に係る誘導電動機の回転子の断面図である。実施の形態1に係る回転子100−1と実施の形態5に係る回転子100−5との相違点は以下の通りである。
(1)回転子100−5の補強部材4−1,4−2は、それぞれの外周部4aの内、第1の溝部4bよりも回転子鉄心1とは反対側の外周部4a3の外径寸法OD2が、第1の溝部4bよりも回転子鉄心1側の外周部4a2の外径寸法OD1よりも大きい。外周部4a2の軸線方向D1における幅は、外周部4a3の軸線方向D1における幅と等しい。
実施の形態6では実施の形態1から5の第1の変形例を説明する。図13は図2に示す回転子の第1の変形例を示す図である。図2に示す回転子100−1と図13に示す回転子100−6Aとの相違点は以下の通りである。
(1)回転子100−6Aの第1の溝部4bは、第1の溝部4bの回転子鉄心1とは反対側の端部に第1の傾斜面4dを備える。
(2)回転子100−6Aの第1の突起部3bは、第1の突起部3bの回転子鉄心1とは反対側の端部に第2の傾斜面3dを備える。第2の傾斜面3dは第1の傾斜面4dと接する。
(1)回転子100−6Bは、複数の第1の溝部4bのそれぞれが、第1の溝部4bの回転子鉄心1とは反対側の端部に第1の傾斜面4dを備える。
(2)回転子100−6Bは、複数の第1の突起部3bのそれぞれが、第1の突起部3bの回転子鉄心1とは反対側の端部に第2の傾斜面3dを備える。第2の傾斜面3dは第1の傾斜面4dと接する。
(1)回転子100−6Cは、第1の溝部4b及び第2の溝部4b1のそれぞれが、第1の溝部4b及び第2の溝部4b1の回転子鉄心1とは反対側の端部に第1の傾斜面4dを備える。
(2)回転子100−6Cは、第1の突起部3b及び第2の突起部3b1のそれぞれが、第1の突起部3b及び第2の突起部3b1の回転子鉄心1とは反対側の端部に第2の傾斜面3dを備える。第2の傾斜面3dは第1の傾斜面4dと接する。
(1)回転子100−6Dの第1の溝部4bは、第1の溝部4bの回転子鉄心1とは反対側の端部に第1の傾斜面4dを備える。
(2)回転子100−6Dの第1の突起部3bは、第1の突起部3bの回転子鉄心1とは反対側の端部に第2の傾斜面3dを備える。第2の傾斜面3dは第1の傾斜面4dと接する。
(1)回転子100−6Eの第1の溝部4bは、第1の溝部4bの回転子鉄心1とは反対側の端部に第1の傾斜面4dを備える。
(2)回転子100−6Eの第1の突起部3bは、第1の突起部3bの回転子鉄心1とは反対側の端部に第2の傾斜面3dを備える。第2の傾斜面3dは第1の傾斜面4dと接する。
実施の形態7では実施の形態1から5の第2の変形例を説明する。図18は図2に示す回転子の第2の変形例を示す図である。図2に示す回転子100−1と図18に示す回転子100−7Aとの相違点は以下の通りである。
(1)回転子100−7Aの第1の溝部4bは、第1の溝部4bの回転子鉄心1側の端部に第1の傾斜面4d1を備える。
(2)回転子100−7Aの第1の突起部3bは、第1の突起部3bの回転子鉄心1側の端部に第2の傾斜面3d1を備える。第2の傾斜面3d1は第1の傾斜面4d1と接する。
(1)回転子100−7Bは、複数の第1の溝部4bのそれぞれが、第1の溝部4bの回転子鉄心1側の端部に第1の傾斜面4d1を備える。
(2)回転子100−7Bは、複数の第1の突起部3bのそれぞれが、第1の突起部3bの回転子鉄心1側の端部に第2の傾斜面3d1を備える。第2の傾斜面3d1は第1の傾斜面4d1と接する。
(1)回転子100−7Cは、第1の溝部4b及び第2の溝部4b1のそれぞれが、第1の溝部4b及び第2の溝部4b1のそれぞれの回転子鉄心1側の端部に第1の傾斜面4d1を備える。
(2)回転子100−7Cは、第1の突起部3b及び第2の突起部3b1のそれぞれが、第1の突起部3b及び第2の突起部3b1のそれぞれの回転子鉄心1側の端部に第2の傾斜面3d1を備える。第2の傾斜面3d1は第1の傾斜面4d1と接する。
(1)回転子100−7Dの第1の溝部4bは、第1の溝部4bの回転子鉄心1側の端部に第1の傾斜面4d1を備える。
(2)回転子100−7Dの第1の突起部3bは、第1の突起部3bの回転子鉄心1側の端部に第2の傾斜面3d1を備える。第2の傾斜面3d1は第1の傾斜面4d1と接する。
(1)回転子100−7Eの第1の溝部4bは、第1の溝部4bの回転子鉄心1側の端部に第1の傾斜面4d1を備える。
(2)回転子100−7Eの第1の突起部3bは、第1の突起部3bの回転子鉄心1側の端部に第2の傾斜面3d1を備える。第2の傾斜面3d1は第1の傾斜面4d1と接する。
実施の形態8では実施の形態1から5の第3の変形例を説明する。図23は図2に示す回転子の第3の変形例を示す図である。図23に示す回転子100−8Aは、第1の溝部4bが、実施の形態6の第1の傾斜面4dと実施の形態7の第1の傾斜面4d1とを備える。また回転子100−8Aは、第1の突起部3bが、実施の形態6の第2の傾斜面3dと実施の形態7の第2の傾斜面3d1とを備える。
Claims (6)
- 回転子鉄心と、
前記回転子鉄心を貫通するシャフトと、
前記回転子鉄心の端部に設けられる環状のエンドリングと、
前記シャフトと前記エンドリングの内周部との間に設けられ、外周部が前記エンドリングに接する環状の補強部材と
を備え、
前記エンドリングの内周部に設けられた第1の突起部が、前記補強部材の外周部に設けられた第1の溝部内に嵌められ、
前記補強部材は、前記補強部材の外周部の内、前記第1の溝部よりも前記回転子鉄心側の外周部の外径寸法が、前記第1の溝部よりも前記回転子鉄心とは反対側の外周部の外径寸法よりも大きいことを特徴とする誘導電動機の回転子。 - 回転子鉄心と、
前記回転子鉄心を貫通するシャフトと、
前記回転子鉄心の端部に設けられる環状のエンドリングと、
前記シャフトと前記エンドリングの内周部との間に設けられ、外周部が前記エンドリングに接する環状の補強部材と
を備え、
前記エンドリングの内周部に設けられた第1の突起部が、前記補強部材の外周部に設けられた第1の溝部内に嵌められ、
前記補強部材は、前記補強部材の外周部の内、前記第1の溝部よりも前記回転子鉄心とは反対側の外周部の外径寸法が、前記第1の溝部よりも前記回転子鉄心側の外周部の外径寸法よりも大きいことを特徴とする誘導電動機の回転子。 - 前記第1の突起部及び前記第1の溝部は、それぞれ環状に設けられていることを特徴とする請求項1又は請求項2に記載の誘導電動機の回転子。
- 前記エンドリングは、前記第1の突起部の内周部に設けられる第2の突起部を備え、
前記補強部材は、前記第1の溝部の外周部に設けられ前記第2の突起部が嵌まる第2の溝部を備え、
前記回転子鉄心の中心軸の軸線方向における前記第2の突起部の幅は、前記軸線方向における前記第1の突起部の幅よりも狭く、
前記軸線方向における前記第2の溝部の幅は、前記軸線方向における前記第1の溝部の幅よりも狭いことを特徴とする請求項1から請求項3の何れか一項に記載の誘導電動機の回転子。 - 前記第1の溝部は、前記回転子鉄心の中心軸の軸線方向における前記第1の溝部の端部に第1の傾斜面を備え、
前記第1の突起部は、前記軸線方向における前記第1の突起部の端部に、前記第1の傾斜面と接する第2の傾斜面を備えることを特徴とする請求項1から請求項4の何れか一項に記載の誘導電動機の回転子。 - 請求項1から請求項5の何れか一項に記載の誘導電動機の回転子を備えた誘導電動機。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2016/074556 WO2018037486A1 (ja) | 2016-08-23 | 2016-08-23 | 誘導電動機の回転子及び誘導電動機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP6165385B1 true JP6165385B1 (ja) | 2017-07-19 |
| JPWO2018037486A1 JPWO2018037486A1 (ja) | 2018-08-23 |
Family
ID=59351365
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017512400A Active JP6165385B1 (ja) | 2016-08-23 | 2016-08-23 | 誘導電動機の回転子及び誘導電動機 |
Country Status (6)
| Country | Link |
|---|---|
| JP (1) | JP6165385B1 (ja) |
| KR (1) | KR20180044836A (ja) |
| CN (1) | CN107980197B (ja) |
| DE (1) | DE112016007177T5 (ja) |
| TW (1) | TWI637582B (ja) |
| WO (1) | WO2018037486A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR3086121B1 (fr) | 2018-09-19 | 2020-10-16 | Ge Energy Power Conversion Technology Ltd | Rotor pour machine electrique asynchrone a arbre non traversant |
| DE102022202525A1 (de) | 2022-03-15 | 2023-09-21 | Zf Friedrichshafen Ag | Rotor für eine elektrische Maschine |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS55127869A (en) * | 1979-03-22 | 1980-10-03 | Mitsubishi Electric Corp | Rotor of rotating electric machine |
| JPS5935554A (ja) * | 1982-08-18 | 1984-02-27 | Toshiba Corp | かご形誘導電動機 |
| JPH03289338A (ja) * | 1990-04-03 | 1991-12-19 | Fuji Electric Co Ltd | 回転電機の回転子 |
| WO2015188985A1 (de) * | 2014-06-11 | 2015-12-17 | Robert Bosch Gmbh | Elektrische asynchronmaschine mit innen liegendem stabilisierungsring für den kurzschlussring |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0777504B2 (ja) * | 1987-11-17 | 1995-08-16 | ファナック株式会社 | 高速インダクション型モータのロータ構造 |
| JP3219642B2 (ja) * | 1995-06-15 | 2001-10-15 | 株式会社東芝 | かご形回転子の製造方法 |
| JP5969525B2 (ja) | 2014-02-25 | 2016-08-17 | ファナック株式会社 | 端絡環を備える回転子、および電動機 |
| WO2015151362A1 (ja) * | 2014-03-31 | 2015-10-08 | 三菱電機株式会社 | 籠型モータの回転子および籠型モータ |
| CN204304648U (zh) * | 2014-12-18 | 2015-04-29 | 重庆赛力盟电机有限责任公司 | 中型异步电机转子压圈结构 |
-
2016
- 2016-08-23 JP JP2017512400A patent/JP6165385B1/ja active Active
- 2016-08-23 WO PCT/JP2016/074556 patent/WO2018037486A1/ja active Application Filing
- 2016-08-23 DE DE112016007177.9T patent/DE112016007177T5/de active Pending
- 2016-08-23 KR KR1020177022066A patent/KR20180044836A/ko not_active Application Discontinuation
- 2016-08-23 CN CN201680010534.XA patent/CN107980197B/zh active Active
-
2017
- 2017-07-10 TW TW106123044A patent/TWI637582B/zh active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS55127869A (en) * | 1979-03-22 | 1980-10-03 | Mitsubishi Electric Corp | Rotor of rotating electric machine |
| JPS5935554A (ja) * | 1982-08-18 | 1984-02-27 | Toshiba Corp | かご形誘導電動機 |
| JPH03289338A (ja) * | 1990-04-03 | 1991-12-19 | Fuji Electric Co Ltd | 回転電機の回転子 |
| WO2015188985A1 (de) * | 2014-06-11 | 2015-12-17 | Robert Bosch Gmbh | Elektrische asynchronmaschine mit innen liegendem stabilisierungsring für den kurzschlussring |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20180044836A (ko) | 2018-05-03 |
| TWI637582B (zh) | 2018-10-01 |
| CN107980197A (zh) | 2018-05-01 |
| DE112016007177T5 (de) | 2019-07-04 |
| TW201807928A (zh) | 2018-03-01 |
| WO2018037486A1 (ja) | 2018-03-01 |
| CN107980197B (zh) | 2020-01-10 |
| JPWO2018037486A1 (ja) | 2018-08-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5359062B2 (ja) | 永久磁石式回転機の回転子構造 | |
| WO2017085860A1 (ja) | 電動機 | |
| JP6189001B1 (ja) | 誘導電動機の回転子及び誘導電動機 | |
| WO2016080284A1 (ja) | 誘導電動機 | |
| JP6165385B1 (ja) | 誘導電動機の回転子及び誘導電動機 | |
| JP5955155B2 (ja) | ブラシレスモータ | |
| JP2007135371A (ja) | 回転電機のロータ | |
| JP2009011010A (ja) | 電動機、連結部材および電動機連結方法 | |
| JP6758359B2 (ja) | 回転電機 | |
| CN112640258B (zh) | 旋转电机 | |
| JP2019062624A (ja) | ロータ | |
| JP6482846B2 (ja) | 電動機 | |
| JP2007143325A (ja) | 電気モータのステータ構造 | |
| CN110120712A (zh) | 旋转电机的定子 | |
| JPWO2020170782A1 (ja) | ステータコア、ロータコアおよびモータ | |
| CN111987822A (zh) | 定子组件及马达 | |
| JP6139748B1 (ja) | 回転電機の固定子 | |
| JP2007181269A (ja) | ステータ、モータ、ステータの製造方法及びコアの使用方法 | |
| JP5130242B2 (ja) | ステータ | |
| WO2021075275A1 (ja) | ステータコア、ステータユニット及びモータ | |
| JP2015220823A (ja) | ステータ分割鉄芯の締結構造 | |
| JP2014183630A (ja) | 回転電機のステータ、及びその製造方法 | |
| JP2015201989A (ja) | 回転電機ロータ | |
| KR20230022895A (ko) | 자기기어용 폴피스 및 내측로터 제조방법 | |
| JP2020202655A (ja) | 固定子及び回転電機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170302 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170302 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20170302 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20170517 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170523 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170620 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6165385 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |