JP6156458B2 - モータ制御装置、電動パワーステアリング装置及び車両 - Google Patents
モータ制御装置、電動パワーステアリング装置及び車両 Download PDFInfo
- Publication number
- JP6156458B2 JP6156458B2 JP2015159584A JP2015159584A JP6156458B2 JP 6156458 B2 JP6156458 B2 JP 6156458B2 JP 2015159584 A JP2015159584 A JP 2015159584A JP 2015159584 A JP2015159584 A JP 2015159584A JP 6156458 B2 JP6156458 B2 JP 6156458B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- electrical angle
- motor electrical
- unit
- initial value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/0481—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures
- B62D5/0487—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures detecting motor faults
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
- B62D15/02—Steering position indicators ; Steering position determination; Steering aids
- B62D15/021—Determination of steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
- B62D5/0463—Controlling the motor calculating assisting torque from the motor based on driver input
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/0481—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures
- B62D5/0484—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures for reaction to failures, e.g. limp home
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/0481—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures
- B62D5/049—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures detecting sensor failures
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/0481—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures
- B62D5/0493—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures detecting processor errors, e.g. plausibility of steering direction
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P25/00—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details
- H02P25/16—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details characterised by the circuit arrangement or by the kind of wiring
- H02P25/22—Multiple windings; Windings for more than three phases
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
- H02P29/02—Providing protection against overload without automatic interruption of supply
- H02P29/024—Detecting a fault condition, e.g. short circuit, locked rotor, open circuit or loss of load
- H02P29/028—Detecting a fault condition, e.g. short circuit, locked rotor, open circuit or loss of load the motor continuing operation despite the fault condition, e.g. eliminating, compensating for or remedying the fault
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
- H02P29/02—Providing protection against overload without automatic interruption of supply
- H02P29/032—Preventing damage to the motor, e.g. setting individual current limits for different drive conditions
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Power Engineering (AREA)
- Control Of Ac Motors In General (AREA)
- Power Steering Mechanism (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Control Of Electric Motors In General (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Description
特許文献1に記載された従来例にあっては、レゾルバ等の位置センサによってロータ回転位置θを検出し、指令電圧Vd1、Vq1及びロータ回転位置θに基づき、三相電圧指令値であるU相指令電圧Vuu*1、V相指令電圧Vvu*1、及び、W相指令電圧Vwu*1を算出する。
そこで、本発明は、上記従来例の未解決の課題に着目してなされたものであり、モータ電気角を検出するモータ電気角検出部に故障が生じた場合でも電動モータを的確に駆動制御することが可能なモータ制御装置、電動パワーステアリング装置及び車両を提供することを目的としている。
さらに、本発明の第3の態様に係る車両は、上記第2の態様に係る電動パワーステアリング装置を備える。
さらに、上記効果を有する電動パワーステアリング装置を含んで車両を構成するので、モータ電気角検出部に異常が発生した場合でも電動パワーステアリング装置の操舵補助機能の継続が可能となるので、信頼性を向上させることが可能となる。
また、以下に示す第1〜第3実施形態は、本発明の技術的思想を具体化するための装置や方法を例示するものであって、本発明の技術的思想は、構成部品の材質、形状、構造、配置等を下記のものに特定するものでない。本発明の技術的思想は、特許請求の範囲に記載された請求項が規定する技術的範囲内において、種々の変更を加えることができる。
(構成)
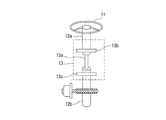
本発明の実施形態に係る車両1は、図1に示すように、左右の転舵輪となる前輪2FR及び2FLと後輪2RR及び2RLを備えている。前輪2FR及び2FLは、電動パワーステアリング装置3によって転舵される。
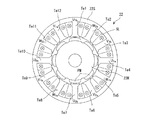
また、3相電動モータ22は、図3に示すように、内周面に内方に突出形成されてスロットSLを形成する磁極となるティースTeを有するステータ22Sと、このステータ22Sの内周側にティースTeと対向して回転自在に配置された永久磁石PMを表面に配置した8極の表面磁石型のロータ22Rとを有するSPMモータの構成を有する。ここで、ステータ22SのティースTeの数を相数×2n(nは2以上の整数)で例えばn=2に設定して8極、12スロットの構成としている。
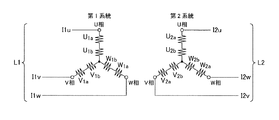
このように第1の3相モータ巻線L1の各相コイル部U1a,U1b、V1a,V1b及びW1a,W1bと、第2の3相モータ巻線L2の各相コイル部U2a,U2b、V2a,V2b及びW2a,W2bと、が互いに異なる12本のティースTe1〜Te12に巻装されている。すなわち、12本のティースTe1〜Te12に、順次第1系統となる相コイルU1a,U1b、V1a,V1b及びW1a,W1bを反時計方向に順に同一の巻回方向で巻装し、次いで、第2系統となる相コイルU2a,U2b、V2a,V2b及びW2a,W2bを反時計方向に順に同一の巻回方向で巻装している。さらに、第1系統となる相コイルU1a,U1b、V1a,V1b及びW1a,W1bを反時計方向に順に同一の巻回方向で巻装し、最後に、第2系統となる相コイルU2a,U2b、V2a,V2b及びW2a,W2bを反時計方向に順に同一の巻回方向で巻装している。このため、第1の3相モータ巻線L1及び第2の3相モータ巻線L2の同相のコイル部がロータ22Rの各磁極の永久磁石PMで形成される同一の磁束に同時に鎖交することがないように巻装されている。したがって、第1の3相モータ巻線L1の各コイル部と第2の3相モータ巻線L2の各コイル部とで互いの磁気的な干渉を最小限に抑制する磁気回路を構成している。
また、モータ制御装置25には、直流電流源としてのバッテリー27から直流電流が入力されている。ここで、バッテリー27の負極は接地され、その正極はエンジン始動を行うイグニッションスイッチ28(以下、「IGNスイッチ28」と記載する場合がある)を介してモータ制御装置25に接続されると共に、IGNスイッチ28を介さず直接、モータ制御装置25に接続されている。
また、制御演算装置31には、図5に示すように、第1及び第2のモータ駆動回路32A及び32Bと第1及び第2のモータ電流遮断回路33A及び33Bとの間に設けられた電圧検出回路40A及び40Bで検出したモータ相電圧V1m(V1mu、V1mv、V1mw)及びV2m(V2mu、V2mv、V2mw)が入力されている。
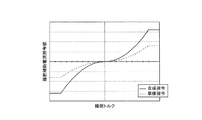
制御演算装置31では、第1及び第2のモータ駆動回路32A及び32Bの正常時には操舵トルクT及び車速Vsをもとに予め設定された図6に示す正常時操舵補助電流指令値算出マップを参照して操舵補助電流指令値I1*及びI2*を算出する。また、制御演算装置31では、第1及び第2のモータ駆動回路32A又は32Bの異常時には操舵トルクT及び車速Vsをもとに予め設定された図7に示す異常時操舵補助電流指令値算出マップを参照して操舵補助電流指令値I1*及びI2*を算出する。
そして、制御演算装置31は、入力されるモータ電流検出値I1mu〜I1mw及びI2mu〜I2mwと自身が算出した各相電流指令値Iu*、Iv*及びIw*とを比較して後述する第1及び第2のインバータ回路42A及び42Bを構成するスイッチング素子としての電界効果トランジスタ(FET)Q1〜Q6のオープン故障及びショート故障を検出する異常検出部31aを備えている。
第1及び第2のモータ駆動回路32A及び32Bのそれぞれは、制御演算装置31から出力される3相の電圧指令値V1*及びV2*が入力されてゲート信号を形成するとともに、異常時電流制御部41aを有するゲート駆動回路41A及び41Bと、これらゲート駆動回路41A及び41Bから出力されるゲート信号が入力される第1及び第2のインバータ回路42A及び42Bとを備えている。
また、ゲート駆動回路41Aは、制御演算装置31から入力される異常検出信号SAaが論理値"0"(正常)であるときには、第1のモータ電流遮断回路33Aに対してハイレベルの3つのゲート信号を出力するとともに、第1の電源遮断回路44Aに対してハイレベルの2つのゲート信号を出力する。さらに、ゲート駆動回路41Aは、異常検出信号SAaが論理値"1"(異常)であるときには、異常時電流制御部41aで、第1のモータ電流遮断回路33Aに対してローレベルの3つのゲート信号を同時に出力し、モータ電流を遮断するとともに、第1の電源遮断回路44Aに対してローレベルの2つのゲート信号を同時に出力し、バッテリー電力を遮断する。
これら第1及び第2のインバータ回路42A及び42Bは、6個のスイッチング素子としての電界効果トランジスタ(FET)Q1〜Q6を有し、2つの電界効果トランジスタを直列に接続した3つのスイッチングアームSAu、SAv及びSAwを並列に接続した構成を有する。そして、各電界効果トランジスタQ1〜Q6のゲートにゲート駆動回路41A及び41Bから出力されるゲート信号が入力されることにより、各スイッチングアームSAu、SAv及びSAwの電界効果トランジスタ間からU相電流Iu、V相電流Iv及びW相電流Iwが第1及び第2のモータ電流遮断回路33A及び33Bを介して3相電動モータ22の第1及び第2の3相モータ巻線L1及びL2に出力される。
また、第1のモータ電流遮断回路33Aは、3つの電流遮断用の電界効果トランジスタQA1、QA2及びQA3を有する。電界効果トランジスタQA1のソースが第1のインバータ回路42AのスイッチングアームSAuのトランジスタQ1及びQ2の接続点に接続され、ドレインが第1の異常検出回路35Aを介して第1の3相モータ巻線L1のU相コイルL1uに接続されている。また、電界効果トランジスタQA2のソースが第1のインバータ回路42AのスイッチングアームSAvのトランジスタQ3及びQ4の接続点に接続され、ドレインが第1の異常検出回路35Aを介して第1の3相モータ巻線L1のV相コイルL1vに接続されている。さらに、電界効果トランジスタQA3のソースが第1のインバータ回路42AのスイッチングアームSAwのトランジスタQ5及びQ6の接続点に接続され、ドレインが第1の異常検出回路35Aを介して第1の3相モータ巻線L1のW相コイルL1wに接続されている。
また、第1及び第2の電源遮断回路44A及び44Bのそれぞれは、2つの電界効果トランジスタ(FET)QC1,QC2及びQD1,QD2がドレイン同士を接続して寄生ダイオードが逆向きとなる直列回路構成を有する。そして、電界効果トランジスタQC1及びQD1のソースが互いに接続されてノイズフィルタ43の出力側に接続され、電界効果トランジスタQC2及びQD2のソースが第1及び第2のインバータ回路42A及び42Bの各電界効果トランジスタQ1,Q2及びQ3のソースに接続されている。
次に、第1実施形態に係るモータ電気角検出回路23の具体的な構成を説明する。
第1実施形態のモータ電気角検出回路23は、図8に示すように、メインモータ電気角検出回路23bと、サブモータ電気角検出回路23cと、電気角選択部23dと、RAM50と、ROM51とを備えている。
メインモータ電気角検出回路23bは、角度演算部60と、レゾルバ異常診断部61とを備えている。
レゾルバ異常診断部61は、レゾルバ23aの異常を検出し、異常検出信号SArを出力する。
相対オフセット量推定部62は、モータ電気角θmの原点θmd(以下、「モータ電気角原点θmd」と記載する場合がある)と出力軸回転角検出値θosの基準値θosrとの相対オフセット量θoffを推定する。そして、推定した相対オフセット量θoffをモータ電気角推定部63に出力する。
θme=θos×RGr×P+θoff ・・・(1)
即ち、出力軸回転角検出値θosに対して減速比RGr及び極対数Pを乗算し、この乗算結果に対して相対オフセット量θoffを加算することでモータ電気角推定値θmeを算出する。
次に、第1実施形態に係る相対オフセット量推定部62の具体的な構成について説明する。
第1実施形態の相対オフセット量推定部62は、図9に示すように、第1相対オフセット量推定部70と、第2相対オフセット量推定部71と、相対オフセット量選択部72とを備えている。
なお、基準値θosrは、システム起動時(IGNスイッチ28がOFFからONになった時)の出力軸回転角検出値に極対数Pと減速比RGrとを乗算したものである。
第2相対オフセット量推定部71は、イグニッションスイッチがOFF状態となるシステム停止後からIGNスイッチ28が再びON状態となるシステム再起動後のレゾルバ異常診断部61による初期診断にて異常検出信号SArが異常ありを示す値であったときに、第2の相対オフセット量θoff2を推定する。そして、推定した第2の相対オフセット量θoff2をRAM50に記憶する。なお、第1実施形態のレゾルバ異常診断部61は、IGNスイッチ28がON状態となってシステムが起動した直後に診断を行うようになっている。
したがって、システム再起動後の初期診断で異常と診断された場合は、モータ電気角原点θmdを推定すると共に、推定したモータ電気角原点θmdに基づき第2の相対オフセット量θoff2を推定する必要がある。
次に、第1実施形態に係る第2相対オフセット量推定部71の具体的な構成について説明する。
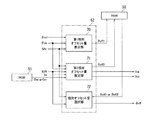
第1実施形態の第2相対オフセット量推定部71は、図11に示すように、高調波指令出力部110と、電気角初期値推定部111と、電気角初期値補正部112と、第1磁気飽和指令出力部113と、オフセット量推定処理部114とを備えている。
第1実施形態の制御演算装置31は、第1電圧出力指令Voi1の入力に応じて高調波電圧による通電を行う電圧指令を生成し、生成した電圧指令をゲート駆動回路41A及び41Bに出力する。これにより、第1及び第2のインバータ回路42A及び42Bを介して、3相電動モータ22への高調波電圧による通電が行われる。
ここで、高調波電圧の印加に応じて3相電動モータ22にはモータ電気角θmに依存した電流が流れる。具体的に、この電流のピーク値である第1電流ピーク値Imp1はモータ電気角の情報を有している。
電気角初期値推定部111は、検出した第1電流ピーク値Imp1からROM51に記憶された電気角情報マップを参照してモータ電気角情報θmiを読み出し、読み出したモータ電気角情報θmiに基づきモータ電気角初期値θmsを推定する。そして、推定したモータ電気角初期値θmsを電気角初期値補正部112に出力する。
第1磁気飽和指令出力部113は、電気角初期値補正部112からの出力指示に応じて、第1磁気飽和電圧指令の出力指令である第1飽和電圧出力指令Vsi1を制御演算装置31に出力する。
ここで、第1磁気飽和電圧を印加した場合も3相電動モータ22にモータ電気角θmに依存した電流が流れる。この電流のベクトルの大きさはN極方向を向くときの方がS極方向を向くときよりも大きくなる特性を有している。即ち、この電流の第2電流ピーク値Impは、第1電流ピーク値Im1のベクトルの向く方向(N極方向及びS極方向)を判別する情報を有しており、この情報に基づきモータ電気角初期値θmsを補正することが可能である。
電気角初期値補正部112は、検出した第2電流ピーク値Imp2からROM51に記憶された補正情報マップを参照してモータ電気角補正情報Cmを読み出し、読み出したモータ電気角補正情報Cmに基づきモータ電気角初期値θmsを補正する。そして、補正後のモータ電気角初期値θmscをオフセット量推定処理部114に出力する。
相対オフセット量選択部72は、システム起動中に異常検出信号SArが異常ありを示す値となった場合に、第1の相対オフセット量θoff1を選択し、システム再起動後の初期診断で異常検出信号SArが異常ありを示す値となった場合に、第2の相対オフセット量θoff2を選択する。そして、第1の相対オフセット量θoff1及び第2の相対オフセット量θoff2のうち選択した方をRAM50から読み出し、相対オフセット量θoffとしてモータ電気角推定部63に出力する。
次に、上記第1実施形態の動作を説明する。
IGNスイッチ28がオフ状態であって車両1が停止していると共に、操舵補助制御処理も停止している作動停止状態であるときには、モータ制御装置25の制御演算装置31及びモータ電気角検出回路23が非作動状態となっている。
このため、制御演算装置31及びモータ電気角検出回路23で実行される各種処理は停止されている。この状態では、3相電動モータ22は作動を停止しており、ステアリング機構への操舵補助力の出力を停止している。
このときには、異常検出信号SArが異常なしを表す値となり、電気角選択部23dは、角度演算部60で演算した第1のモータ電気角θm1をモータ電気角θmとして制御演算装置31に出力する。
モータ電気角推定部63は、レゾルバ23a及び角度演算部60の正常時において、出力側回転角センサ13cで検出される出力軸回転角検出値θosと、第1の相対オフセット量θoff1と、減速比RGr(例えば、20.5)と、磁極対(例えば、4)とからモータ電気角推定値θmeを算出する。そして、モータ電気角推定値θmeを第2のモータ電気角θm2として電気角選択部23dに出力する。
これにより、制御演算装置31では、サブモータ電気角検出回路23cで推定した第2のモータ電気角θm2に基づき3相電動モータ22を駆動制御(転流制御)する。
この場合、システム再起動後のレゾルバ異常診断部61による初期診断によって異常検出信号SArが異常ありを表す値となり、相対オフセット量推定部62において、第2の相対オフセット量θoff2の推定処理が実施される。
これにより、制御演算装置31では、サブモータ電気角検出回路23cで推定した第2のモータ電気角θm2に基づき3相電動モータ22を駆動制御(転流制御)する。
また、操舵トルクセンサ13がトルク検出部に対応し、出力側回転角センサ13cがステアリング舵角検出部に対応し、3相電動モータ22が多相電動モータに対応し、レゾルバ23a及び角度演算部60がモータ電気角検出部に対応する。
また、第1及び第2のインバータ回路42A及び42Bがモータ駆動回路に対応し、制御演算装置31が制御演算装置に対応し、レゾルバ異常診断部61が、異常診断部に対応する。
(1)第1実施形態に係るモータ制御装置25は、電気角初期値推定部111が、システム再起動後の初期診断において、操舵補助力を発生する3相電動モータ22のモータ電気角θmを検出するレゾルバ23a及び角度演算部60の少なくとも一方が異常と診断されると、3相電動モータ22へのモータ駆動信号(高調波電圧)の入力に応じた3相電動モータ22の応答出力(応答電流)に基づきモータ電気角初期値θmsを推定する。モータ電気角推定部63が、出力軸回転角検出値θosと、モータ電気角初期値θms(に基づき推定した第2の相対オフセット量θoff2)とに基づきモータ電気角θmを推定する。制御演算装置31及びモータ電気角検出回路23が、レゾルバ23a及び角度演算部60が正常時はこれらで検出した第1のモータ電気角θm1に基づき3相電動モータ22を駆動制御する。一方、システム再起動後の初期診断においてレゾルバ23a及び角度演算部60の少なくとも一方が異常時はモータ電気角推定部63で推定した第2のモータ電気角θm2に基づき3相電動モータ22を駆動制御する。
これにより、レゾルバ23a及び角度演算部60の少なくとも一方が異常と診断されてから一旦システムが停止した後にシステムが再起動した場合や、システム停止中に異常が発生した場合などでもシステム再起動後に3相電動モータ22を正常時と遜色なく駆動することが可能となる。
これにより、レゾルバ23a及び角度演算部60の少なくとも一方が異常と診断されてから一旦システムが停止した後にシステムが再起動した場合や、システム停止中に異常が発生した場合などでもシステム再起動後に3相電動モータ22を正常時と遜色なく駆動することが可能となる。
この構成であれば、3相電動モータ22への高調波の通電に応じた3相電動モータ22のモータ電気角に依存した電流応答に基づきモータ電気角初期値θmsを推定することが可能となる。例えば、応答電流のピーク値等から得られるモータ電気角の情報に基づきモータ電気角初期値θmsを推定することが可能となる。
これにより、システムが再起動後の初期診断で、レゾルバ23a及び角度演算部60の少なくとも一方が異常と診断されても、3相電動モータ22を正確に転流制御可能なモータ電気角を推定することが可能となる。
この構成であれば、3相電動モータ22への磁気飽和が発生する程度の高調波の通電に応じた3相電動モータ22のモータ電気角に依存した電流応答に基づきモータ電気角初期値θmsを補正することが可能となる。例えば、応答電流のピーク値等から得られる情報に基づきモータ電気角初期値θmsを補正することが可能となる。
これにより、より正確なモータ電気角初期値θmsを得ることが可能となる。
この構成であれば、上記(1)〜(4)に記載のモータ制御装置25と同等の作用及び効果が得られると共に、レゾルバ23a及び角度演算部60の故障時も操舵補助制御を継続することが可能となるので電動パワーステアリング装置3の信頼性を向上することが可能となる。
この構成であれば、上記(1)〜(4)に記載のモータ制御装置25と同等の作用及び効果が得られると共に、レゾルバ23aの故障時も操舵補助制御を継続することが可能となるので車両1の信頼性を向上することが可能となる。
次に、本発明の第2実施形態を説明する。
(構成)
この第2実施形態は、上記第1実施形態の相対オフセット量推定部62における第2相対オフセット量推定部71に代えて第3相対オフセット量推定部73を備える点で相違し、それ以外は上記第1実施形態と同様となる。
以下、上記第1実施形態と同じ構成部については同じ符号を付して適宜説明を省略し、異なる部分を詳細に説明する。
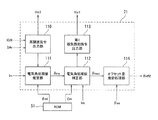
第2実施形態の第3相対オフセット量推定部73は、図13に示すように、パルス指令出力部115と、電気角初期値推定部111と、電気角初期値補正部112と、第2磁気飽和指令出力部116と、オフセット量推定処理部114とを備えている。
パルス指令出力部115は、システム再起動後の初期診断において異常検出信号SArが異常ありを示す値となったときに、3相電動モータ22のロータ22Rが回転せずかつステータ22Sに磁気飽和が生じない程度のパルス波の電圧指令の出力指令である第2電圧出力指令Voi2を制御演算装置31に出力する。
ここで、上記第1実施形態の高調波電圧と同様にパルス波電圧の印加に応じて3相電動モータ22にはモータ電気角θmに依存した電流が流れる。具体的に、この電流のピーク値である第3電流ピーク値Imp3はモータ電気角の情報を有している。
電気角初期値推定部111は、検出した第3電流ピーク値Imp3からROM51に記憶された電気角情報マップを参照してモータ電気角情報θmiを読み出し、読み出したモータ電気角情報θmiに基づきモータ電気角初期値θmsを推定する。そして、推定したモータ電気角初期値θmsを電気角初期値補正部112に出力する。
第2磁気飽和指令出力部116は、電気角初期値補正部112からの出力指示に応じて、第2磁気飽和電圧指令の出力指令である第2飽和電圧出力指令Vsi2を制御演算装置31に出力する。
ここで、第2磁気飽和電圧を印加した場合も3相電動モータ22にモータ電気角θmに依存した電流が流れる。即ち、上記第1実施形態の第1磁気飽和電圧を印加した場合と同様の特性を有する電流が流れる。
電気角初期値補正部112は、検出した第4電流ピーク値Imp4からROM51に記憶された補正情報マップを参照してモータ電気角補正情報Cmを読み出し、読み出したモータ電気角補正情報Cmに基づきモータ電気角初期値θmsを補正する。そして、補正後のモータ電気角初期値θmscをオフセット量推定処理部114に出力する。
また、操舵トルクセンサ13がトルク検出部に対応し、出力側回転角センサ13cがステアリング舵角検出部に対応し、3相電動モータ22が多相電動モータに対応し、レゾルバ23a及び角度演算部60がモータ電気角検出部に対応する。
また、第1及び第2のインバータ回路42A及び42Bがモータ駆動回路に対応し、制御演算装置31が制御演算装置に対応し、レゾルバ異常診断部61が、異常診断部に対応する。
第2実施形態は、上記第1実施形態の効果に加えて以下の効果を奏する。
(1)第2実施形態に係るモータ制御装置25は、電気角初期値推定部111が、3相電動モータ22へのパルス波の通電を行った際の電流応答に基づきモータ電気角初期値θmsを推定する。
これにより、システムが再起動後の初期診断で、レゾルバ23a及び角度演算部60の少なくとも一方が異常と診断されても、3相電動モータ22を正常時と遜色なく転流制御可能なモータ電気角を推定することが可能となる。
この構成であれば、3相電動モータ22への磁気飽和が発生する程度の高調波の通電に応じた3相電動モータ22のモータ電気角に依存した電流応答に基づきモータ電気角初期値θmsを補正することが可能となる。例えば、応答電流のピーク値等から得られる情報に基づきモータ電気角初期値θmsを補正することが可能となる。
これにより、より正確なモータ電気角初期値θmsを得ることが可能となる。
次に、本発明の第3実施形態を説明する。
(構成)
この第3実施形態は、上記第1実施形態の相対オフセット量推定部62における第2相対オフセット量推定部71に代えて第4相対オフセット量推定部74を備える点で相違し、それ以外は上記第1実施形態と同様となる。
以下、上記第1実施形態と同じ構成部については同じ符号を付して適宜説明を省略し、異なる部分を詳細に説明する。
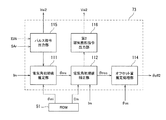
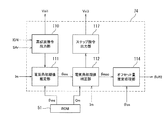
第3実施形態の第4相対オフセット量推定部74は、図15に示すように、高調波指令出力部110と、電気角初期値推定部111と、電気角初期値補正部112と、ステップ指令出力部117と、オフセット量推定処理部114とを備えている。
第3実施形態の電気角初期値補正部112は、モータ電気角初期値θmsの入力に応じて、3相電動モータ22のロータ22Rが回転しない程度のステップ波の電圧指令(以下、「ステップ電圧指令」と記載する場合がある)の出力指示をステップ指令出力部117に出力する。
第3実施形態の制御演算装置31は、ステップ電圧出力指令Vsi3の入力に応じてステップ電圧指令を生成し、生成したステップ電圧指令をゲート駆動回路41A及び41Bに出力する。これにより、第1及び第2のインバータ回路42A及び42Bを介して、3相電動モータ22へのステップ波電圧(以下、「ステップ波電圧」と記載する場合がある)による通電が行われる。
ここで、ステップ波電圧を印加した場合も3相電動モータ22にモータ電気角θmに依存した電流が流れる。そこで、第2実施形態では、第5電流ピーク値Im5とモータ電気角補正情報Cmとの関係を予め補正情報マップとして用意し、この補正情報マップをROM51に記憶している。
オフセット量推定処理部114は、電気角初期値補正部112からの補正後のモータ電気角初期値θmscに基づきモータ電気角原点θmdを推定する。さらに、このモータ電気角原点θmdと、システム再起動時の出力軸回転角検出値の基準値θosrとに基づき第2の相対オフセット量θoff2を推定する。そして、推定した第2の相対オフセット量θoff2をRAM50に記憶する。
また、操舵トルクセンサ13がトルク検出部に対応し、出力側回転角センサ13cがステアリング舵角検出部に対応し、3相電動モータ22が多相電動モータに対応し、レゾルバ23a及び角度演算部60がモータ電気角検出部に対応する。
また、第1及び第2のインバータ回路42A及び42Bがモータ駆動回路に対応し、制御演算装置31が制御演算装置に対応し、レゾルバ異常診断部61が、異常診断部に対応する。
第3実施形態は、上記第1及び第2実施形態の効果に加えて以下の効果を奏する。
(1)第3実施形態に係るモータ制御装置25は、3相電動モータ22に対してステップ状波の通電を行った際の電流応答に基づきモータ電気角初期値θmsを補正する。
この構成であれば、3相電動モータ22へのステップ状波の通電に応じた3相電動モータ22のモータ電気角に依存した電流応答に基づきモータ電気角初期値θmsを補正することが可能となる。例えば、応答電流のピーク値等から得られる情報に基づきモータ電気角初期値θmsを補正することが可能となる。
これにより、より正確なモータ電気角初期値θmsを得ることが可能となる。
(1)上記実施形態においては、操舵トルクセンサ13を構成する出力側回転角センサ13cで検出した出力軸回転角検出値θosに基づきモータ電気角を推定する構成としたが、この構成に限らない。例えば、入力側回転角センサ13bで検出した入力軸回転角θisに基づきモータ電気角を推定するなど、ステアリングホイール11の操作に伴って回転する軸の回転角を検出するセンサであれば他のセンサで検出した回転角に基づきモータ電気角を推定してもよい。
Claims (8)
- システム再起動後の初期診断において、操舵補助力を発生する多相電動モータのモータ電気角を検出するモータ電気角検出部が異常と診断されると、前記多相電動モータへのモータ駆動信号の入力に応じた前記多相電動モータの応答出力に基づき前記モータ電気角の初期値を推定するモータ電気角初期値推定部と、
ステアリングの舵角を検出するステアリング舵角検出部で検出した舵角と前記モータ電気角初期値推定部で推定した前記初期値とに基づき前記モータ電気角を推定するモータ電気角推定部と、
前記モータ電気角検出部が正常時は前記モータ電気角検出部で検出したモータ電気角に基づき前記多相電動モータを駆動制御し、前記システム再起動後の初期診断で前記モータ電気角検出部が異常と診断時は前記モータ電気角推定部で推定したモータ電気角推定値に基づき前記多相電動モータを駆動制御するモータ駆動制御部と、を備えるモータ制御装置。 - ステアリング機構に伝達されるトルクを検出するトルク検出部と、
ステアリングの舵角を検出するステアリング舵角検出部と、
操舵補助力を発生する多相電動モータと、
前記多相電動モータのモータ電気角を検出するモータ電気角検出部と、
前記多相電動モータに駆動電流を供給するモータ駆動回路と、
前記トルク検出部で検出したトルクと前記モータ電気角検出部で検出したモータ電気角とに基づき前記モータ駆動回路を駆動制御する制御演算装置と、
前記モータ電気角検出部の異常を診断する異常診断部と、
システム再起動後の前記異常診断部による初期診断において、前記モータ電気角検出部が異常と診断されると、前記多相電動モータへのモータ駆動信号の入力に応じた前記多相電動モータの応答出力に基づき前記モータ電気角の初期値を推定するモータ電気角初期値推定部と、
前記ステアリング舵角検出部で検出した舵角と前記モータ電気角初期値推定部で推定したモータ電気角初期値とに基づき前記モータ電気角を推定するモータ電気角推定部と、を備え、
前記制御演算装置は、システム再起動後の前記異常診断部による初期診断で前記モータ電気角検出部が異常と診断されると、前記トルク検出部で検出したトルクと前記モータ電気角推定部で推定したモータ電気角推定値とに基づき前記モータ駆動回路を駆動制御するモータ制御装置。 - 前記モータ電気角初期値推定部は、前記多相電動モータへの高調波又はパルス波の通電を行った際の電流応答に基づき前記モータ電気角の初期値を推定する請求項1又は2に記載のモータ制御装置。
- 前記多相電動モータに対して磁気飽和が発生する程度の高調波又はパルス波の通電を行った際の電流応答に基づき前記モータ電気角の初期値を補正するモータ電気角初期値補正部を備える請求項3に記載のモータ制御装置。
- 前記多相電動モータに対してステップ状波の通電を行った際の電流応答に基づき前記モータ電気角の初期値を補正するモータ電気角初期値補正部を備える請求項3に記載のモータ制御装置。
- 前記多相電動モータは、2系統のモータ巻線を備える請求項1から5のいずれか1項に記載のモータ制御装置。
- 請求項1から6のいずれか1項に記載のモータ制御装置を備える電動パワーステアリング装置。
- 請求項7に記載の電動パワーステアリング装置を備える車両。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015159584A JP6156458B2 (ja) | 2015-08-12 | 2015-08-12 | モータ制御装置、電動パワーステアリング装置及び車両 |
| US15/542,767 US10293851B2 (en) | 2015-08-12 | 2016-07-25 | Motor control device, electric power steering device, and vehicle |
| CN201680046676.1A CN107949985A (zh) | 2015-08-12 | 2016-07-25 | 马达控制装置、电动助力转向装置及车辆 |
| PCT/JP2016/071748 WO2017026262A1 (ja) | 2015-08-12 | 2016-07-25 | モータ制御装置、電動パワーステアリング装置及び車両 |
| EP16834959.5A EP3232563B1 (en) | 2015-08-12 | 2016-07-25 | Motor control device, electric power steering device, and vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015159584A JP6156458B2 (ja) | 2015-08-12 | 2015-08-12 | モータ制御装置、電動パワーステアリング装置及び車両 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017038498A JP2017038498A (ja) | 2017-02-16 |
| JP2017038498A5 JP2017038498A5 (ja) | 2017-03-23 |
| JP6156458B2 true JP6156458B2 (ja) | 2017-07-05 |
Family
ID=57983207
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015159584A Active JP6156458B2 (ja) | 2015-08-12 | 2015-08-12 | モータ制御装置、電動パワーステアリング装置及び車両 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10293851B2 (ja) |
| EP (1) | EP3232563B1 (ja) |
| JP (1) | JP6156458B2 (ja) |
| CN (1) | CN107949985A (ja) |
| WO (1) | WO2017026262A1 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109831921B (zh) * | 2016-09-20 | 2021-08-20 | 日立安斯泰莫株式会社 | 传感器装置 |
| US11152885B2 (en) * | 2016-11-18 | 2021-10-19 | Mitsubishi Electric Corporation | Abnormality detection apparatus |
| JP6922669B2 (ja) * | 2017-11-07 | 2021-08-18 | 株式会社ジェイテクト | 操舵制御装置 |
| FR3080919B1 (fr) * | 2018-05-07 | 2020-11-20 | Continental Automotive France | Procede de determination d'un courant estime d'un moteur electrique triphase en mode degrade |
| US10965233B2 (en) * | 2018-05-11 | 2021-03-30 | Nsk Ltd. | Motor control device and electric power steering device including the same |
| JP7003863B2 (ja) * | 2018-07-20 | 2022-02-04 | トヨタ自動車株式会社 | 車両の制御装置、制御方法および制御プログラム |
| WO2020080170A1 (ja) * | 2018-10-15 | 2020-04-23 | 日本電産株式会社 | 故障診断方法、電力変換装置、モータモジュールおよび電動パワーステアリング装置 |
| FR3088717B1 (fr) * | 2018-11-15 | 2021-09-17 | Electricfil Automotive | Systeme de detection pour direction d'un vehicule permettant la mesure du couple et de l'angle volant absolu multi tours |
| JP7234737B2 (ja) * | 2019-03-28 | 2023-03-08 | 株式会社デンソー | 検出ユニット |
| JP7280099B2 (ja) * | 2019-04-19 | 2023-05-23 | 株式会社ジェイテクト | モータの制御システム、およびモータの制御装置 |
| JP7550098B2 (ja) * | 2021-04-06 | 2024-09-12 | 株式会社デンソー | モータ制御装置、及び、それを備えるステアリングシステム |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000217386A (ja) * | 1998-11-19 | 2000-08-04 | Matsushita Electric Ind Co Ltd | 位置センサレスモ―タ制御装置 |
| JP3805336B2 (ja) | 2003-10-22 | 2006-08-02 | ファナック株式会社 | 磁極位置検出装置及び方法 |
| KR100572397B1 (ko) * | 2004-11-16 | 2006-04-18 | 현대모비스 주식회사 | 차량의 조향장치용 토크센서의 고장진단 시스템 및 그의방법 |
| JP2007269277A (ja) * | 2006-03-31 | 2007-10-18 | Isuzu Motors Ltd | 電動パワーステアリング装置 |
| JP4329792B2 (ja) | 2006-08-10 | 2009-09-09 | トヨタ自動車株式会社 | 電動パワーステアリング装置 |
| WO2009145270A1 (ja) * | 2008-05-28 | 2009-12-03 | 本田技研工業株式会社 | モータの制御装置および電動ステアリング装置 |
| JP2010029030A (ja) * | 2008-07-23 | 2010-02-04 | Jtekt Corp | モータ制御装置 |
| JP5263090B2 (ja) * | 2009-09-04 | 2013-08-14 | トヨタ自動車株式会社 | 電動パワーステアリング装置 |
| JP4998836B2 (ja) | 2009-09-30 | 2012-08-15 | 株式会社デンソー | 多相回転機の制御装置、および、これを用いた電動パワーステアリング装置 |
| JP5126325B2 (ja) * | 2009-10-09 | 2013-01-23 | 株式会社デンソー | 回転角検出装置、および、これを用いた電動パワーステアリング装置 |
| JP5699527B2 (ja) * | 2010-10-21 | 2015-04-15 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| US9385648B2 (en) | 2010-10-04 | 2016-07-05 | Jtekt Corporation | Electric power steering apparatus |
| DE102013013623B4 (de) * | 2012-08-29 | 2022-06-30 | Kanzaki Kokyukoki Mfg. Co., Ltd. | Motorsteuersystem für ein mit elektrischem Motor angetriebenes Fahrzeug |
| JP5661839B2 (ja) * | 2013-03-14 | 2015-01-28 | ファナック株式会社 | 異常検出診断機能を備える同期電動機の制御システム |
| US9073569B2 (en) * | 2013-03-19 | 2015-07-07 | Mitsubishi Electric Research Laboratories, Inc. | Determining steering angle of steering column of vehicle |
| JP5569626B1 (ja) * | 2013-06-17 | 2014-08-13 | 日本精工株式会社 | モータ制御装置、これを使用した電動パワーステアリング装置及び車両 |
| CN104584423B (zh) * | 2013-08-12 | 2017-06-13 | 日本精工株式会社 | 马达控制装置、使用该马达控制装置的电动助力转向装置以及车辆 |
-
2015
- 2015-08-12 JP JP2015159584A patent/JP6156458B2/ja active Active
-
2016
- 2016-07-25 US US15/542,767 patent/US10293851B2/en active Active
- 2016-07-25 WO PCT/JP2016/071748 patent/WO2017026262A1/ja not_active Ceased
- 2016-07-25 EP EP16834959.5A patent/EP3232563B1/en not_active Not-in-force
- 2016-07-25 CN CN201680046676.1A patent/CN107949985A/zh active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| WO2017026262A1 (ja) | 2017-02-16 |
| EP3232563B1 (en) | 2019-07-24 |
| US10293851B2 (en) | 2019-05-21 |
| EP3232563A1 (en) | 2017-10-18 |
| CN107949985A (zh) | 2018-04-20 |
| EP3232563A4 (en) | 2018-04-25 |
| US20170369094A1 (en) | 2017-12-28 |
| JP2017038498A (ja) | 2017-02-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6156458B2 (ja) | モータ制御装置、電動パワーステアリング装置及び車両 | |
| JP5907314B2 (ja) | モータ制御装置、これを使用した電動パワーステアリング装置および車両 | |
| JP6004025B2 (ja) | モータ制御装置、これを使用した電動パワーステアリング装置および車両 | |
| JP5569626B1 (ja) | モータ制御装置、これを使用した電動パワーステアリング装置及び車両 | |
| EP3243728B1 (en) | Motor control device, electric power steering device, and vehicle | |
| JP6583592B1 (ja) | モータ制御装置及びこれを備えた電動パワーステアリング装置 | |
| CN104205616A (zh) | 马达控制装置、使用该马达控制装置的电动动力转向装置以及车辆 | |
| CN104170242A (zh) | 马达控制装置、使用该马达控制装置的电动动力转向装置以及车辆 | |
| WO2009123107A1 (ja) | モータ制御装置および電動パワーステアリング装置 | |
| JP5263079B2 (ja) | 電動パワーステアリング装置 | |
| JP6183424B2 (ja) | モータ制御装置、電動パワーステアリング装置及び車両 | |
| JP2016096608A (ja) | モータ制御装置、これを使用した電動パワーステアリング装置および車両 | |
| JP6119809B2 (ja) | モータ制御装置、電動パワーステアリング装置及び車両 | |
| JP2011230531A (ja) | モータ制御装置 | |
| JP2017036001A5 (ja) | ||
| JP6641908B2 (ja) | モータ制御装置、モータ制御方法、モータ制御プログラム、電動モータ、電動パワーステアリング装置及び車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170209 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170209 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20170209 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20170420 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170509 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170522 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6156458 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |