JP6113293B2 - 脳卒中患者の歩行リハビリテーション用ロボット - Google Patents
脳卒中患者の歩行リハビリテーション用ロボット Download PDFInfo
- Publication number
- JP6113293B2 JP6113293B2 JP2015538007A JP2015538007A JP6113293B2 JP 6113293 B2 JP6113293 B2 JP 6113293B2 JP 2015538007 A JP2015538007 A JP 2015538007A JP 2015538007 A JP2015538007 A JP 2015538007A JP 6113293 B2 JP6113293 B2 JP 6113293B2
- Authority
- JP
- Japan
- Prior art keywords
- patient
- robot
- rehabilitation
- arm
- joint axis
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 208000006011 Stroke Diseases 0.000 title claims description 15
- 210000002683 foot Anatomy 0.000 claims description 9
- 210000000544 articulatio talocruralis Anatomy 0.000 claims description 8
- 230000005021 gait Effects 0.000 claims description 4
- 210000001624 hip Anatomy 0.000 description 11
- 230000037237 body shape Effects 0.000 description 3
- 210000003127 knee Anatomy 0.000 description 3
- 210000000629 knee joint Anatomy 0.000 description 3
- 210000002414 leg Anatomy 0.000 description 3
- 210000003205 muscle Anatomy 0.000 description 3
- 208000034819 Mobility Limitation Diseases 0.000 description 2
- 210000003423 ankle Anatomy 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 210000004197 pelvis Anatomy 0.000 description 2
- 208000035657 Abasia Diseases 0.000 description 1
- 206010039203 Road traffic accident Diseases 0.000 description 1
- 206010003246 arthritis Diseases 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000035876 healing Effects 0.000 description 1
- 210000004394 hip joint Anatomy 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 210000005036 nerve Anatomy 0.000 description 1
- 210000001032 spinal nerve Anatomy 0.000 description 1
- 238000005728 strengthening Methods 0.000 description 1
Images




Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H3/00—Appliances for aiding patients or disabled persons to walk about
- A61H3/04—Wheeled walking aids for patients or disabled persons
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
- A61H1/02—Stretching or bending or torsioning apparatus for exercising
- A61H1/0237—Stretching or bending or torsioning apparatus for exercising for the lower limbs
- A61H1/0244—Hip
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
- A61H1/02—Stretching or bending or torsioning apparatus for exercising
- A61H1/0237—Stretching or bending or torsioning apparatus for exercising for the lower limbs
- A61H1/0266—Foot
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H3/00—Appliances for aiding patients or disabled persons to walk about
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/1628—Pelvis
- A61H2201/163—Pelvis holding means therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/1635—Hand or arm, e.g. handle
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/164—Feet or leg, e.g. pedal
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/165—Wearable interfaces
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2205/00—Devices for specific parts of the body
- A61H2205/10—Leg
Landscapes
- Health & Medical Sciences (AREA)
- Epidemiology (AREA)
- Pain & Pain Management (AREA)
- Physical Education & Sports Medicine (AREA)
- Rehabilitation Therapy (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Rehabilitation Tools (AREA)
Description
Claims (3)
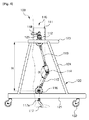
- 患者の胴部を支持する固定バンドと、前記固定バンドと回転可能に連結された骨盤関節軸と、前記骨盤関節軸から下側に一定の長さで延びる第1アームと、前記第1アームと連結された第1連結関節軸と、前記第1連結関節軸から下側に延びる第2アームと、前記第2アームに回転可能に連結された第2連結関節軸と、前記第2連結関節軸から下側に延びる延長片と、前記延長片において足首関節軸によって回転可能に連結されて患者の足を固定して支持するフットレストとを備えるロボット本体と、
前記ロボット本体の固定バンド側を支持する上部フレームと、前記上部フレームを支持する連結フレームと、前記連結フレームと連結されて複数の車輪が設けられた下部フレームとを備える歩行器とを含み、
前記骨盤関節軸と第2連結関節軸は、モータ駆動される関節で構成され、前記第1連結関節軸と足首関節軸は、自由回転される関節で構成され、
前記骨盤関節軸から第2連結関節軸までの高さは、患者の下半身の長さに応じて、第1アームと第2アームとの夾角により調整されることを特徴とする、脳卒中患者の歩行リハビリ用ロボット。 - 前記固定バンドと前記上部フレームとの間には、相互連結状態を維持し、リハビリ患者が歩行器の外部に離脱することを防止する安全手段をさらに備えることを特徴とする、請求項1に記載の脳卒中患者の歩行リハビリ用ロボット。
- 前記安全手段は、ワイヤまたはフレキシブルケーブルのいずれかであることを特徴とする、請求項2に記載の脳卒中患者の歩行リハビリ用ロボット。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR10-2012-0117259 | 2012-10-22 | ||
| KR1020120117259A KR101325066B1 (ko) | 2012-10-22 | 2012-10-22 | 뇌졸중 환자의 보행재활 치료용 로봇 |
| PCT/KR2013/007071 WO2014065493A1 (ko) | 2012-10-22 | 2013-08-06 | 뇌졸중 환자의 보행재활 치료용 로봇 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015532175A JP2015532175A (ja) | 2015-11-09 |
| JP6113293B2 true JP6113293B2 (ja) | 2017-04-12 |
Family
ID=49856676
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015538007A Active JP6113293B2 (ja) | 2012-10-22 | 2013-08-06 | 脳卒中患者の歩行リハビリテーション用ロボット |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20150238382A1 (ja) |
| JP (1) | JP6113293B2 (ja) |
| KR (1) | KR101325066B1 (ja) |
| WO (1) | WO2014065493A1 (ja) |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ES2880106T3 (es) | 2014-03-31 | 2021-11-23 | Parker Hannifin Corp | Dispositivo robótico llevable |
| US10406059B2 (en) | 2014-04-21 | 2019-09-10 | The Trustees Of Columbia University In The City Of New York | Human movement research, therapeutic, and diagnostic devices, methods, and systems |
| CN103989570B (zh) * | 2014-04-30 | 2017-12-08 | 中国康复研究中心 | 一种外动力驱动的交互式截瘫助行外骨骼 |
| KR101694848B1 (ko) * | 2015-06-18 | 2017-01-13 | 주식회사 티이에스 | 환자의 재활 치료를 돕는 보행 재활 로봇 |
| CN105640743B (zh) * | 2015-12-17 | 2017-07-25 | 吉林大学 | 多功能步态矫姿与行走减负器 |
| CN105456004B (zh) * | 2015-12-28 | 2019-02-01 | 中国科学院自动化研究所 | 外骨骼式移动步行康复训练装置及方法 |
| WO2018045460A1 (en) * | 2016-09-08 | 2018-03-15 | Trexo Robotics Inc. | Mobile weight-bearing powered orthosis device |
| US10639510B2 (en) | 2017-03-20 | 2020-05-05 | The Trustees Of Columbia University In The City Of New York | Human musculoskeletal support and training system methods and devices |
| CN110882133B (zh) * | 2018-09-07 | 2022-06-17 | 北京大艾机器人科技有限公司 | 用于外骨骼机器人的平衡辅助装置及方法 |
| CN110946742B (zh) * | 2019-12-02 | 2021-11-19 | 南京伟思医疗科技股份有限公司 | 一种减重车助力辅助下肢机器人重心转移的装置及方法 |
| CN110960403B (zh) * | 2019-12-31 | 2021-08-24 | 布法罗机器人科技(成都)有限公司 | 一种行走安全支架及外骨骼机器人 |
| CN112587385A (zh) * | 2021-01-05 | 2021-04-02 | 石家庄熙美科技有限公司 | 一种专用于腿部恢复行走的设备 |
| CN113558944B (zh) * | 2021-07-12 | 2024-05-14 | 御德慧康健康科技(深圳)有限公司 | 一种康复科用患者辅助行走设备 |
| CN114029932A (zh) * | 2021-11-21 | 2022-02-11 | 北京华能新锐控制技术有限公司 | 清仓机器人的柔性臂的支撑机构 |
| CN114053106A (zh) * | 2021-12-09 | 2022-02-18 | 袁靖 | 一种肢臂充气康复机器人 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2210269A (en) * | 1938-02-01 | 1940-08-06 | Byron M Taylor | Means to aid in regaining normal body locomotion |
| US5526893A (en) * | 1994-01-27 | 1996-06-18 | H. Eugene Mack | Physical therapy apparatus |
| JP2000233002A (ja) * | 1999-02-16 | 2000-08-29 | Murata Mach Ltd | 歩行器 |
| KR100716597B1 (ko) | 2005-12-30 | 2007-05-09 | 서강대학교산학협력단 | 지능형 근력 및 보행 보조용 로봇 |
| ITMI20060187A1 (it) * | 2006-02-03 | 2007-08-04 | Benito Ferrati | Apparecchio ortopedico per la deambulazione e riabilitazione di persone motu-lese |
| CN101460118B (zh) * | 2006-06-29 | 2011-12-28 | 本田技研工业株式会社 | 步行辅助装置 |
| WO2008096210A1 (en) * | 2007-02-10 | 2008-08-14 | Roy Rodetsky | Powered mobile lifting, gait training and omnidirectional rolling apparatus and method |
| NO326332B1 (no) * | 2007-02-19 | 2008-11-10 | Inspiro As | Treningsapparatur for bevgelseshemmede |
| WO2008124025A1 (en) * | 2007-04-06 | 2008-10-16 | University Of Delaware | Powered orthosis |
| US20100270771A1 (en) * | 2007-10-02 | 2010-10-28 | Tokyo University Of Science Educational Foundation Adminstrative Organization | Walking auxiliary equipment |
| JP5075777B2 (ja) * | 2008-09-23 | 2012-11-21 | 本田技研工業株式会社 | リハビリテーション装置 |
| JP2011092507A (ja) * | 2009-10-30 | 2011-05-12 | Satsuma Tsushin Kogyo Kk | 装着型筋力補助装置 |
| KR101099521B1 (ko) * | 2009-12-24 | 2011-12-27 | 한국산재의료원 | 웨어러블 로봇보행 슈트 |
| KR20110083143A (ko) * | 2010-01-13 | 2011-07-20 | 한국생산기술연구원 | 착용형 로봇 |
| JP4806094B1 (ja) | 2010-10-10 | 2011-11-02 | 栄作 斉藤 | 自転歩行器 |
| GB2484463A (en) * | 2010-10-11 | 2012-04-18 | Jonathan Butters | Apparatus to assist the rehabilitation of disabled persons |
| JP5844054B2 (ja) * | 2011-02-25 | 2016-01-13 | 川崎重工業株式会社 | 装着型動作支援装置 |
-
2012
- 2012-10-22 KR KR1020120117259A patent/KR101325066B1/ko active IP Right Grant
-
2013
- 2013-08-06 US US14/437,780 patent/US20150238382A1/en not_active Abandoned
- 2013-08-06 JP JP2015538007A patent/JP6113293B2/ja active Active
- 2013-08-06 WO PCT/KR2013/007071 patent/WO2014065493A1/ko active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| KR101325066B1 (ko) | 2013-11-05 |
| US20150238382A1 (en) | 2015-08-27 |
| JP2015532175A (ja) | 2015-11-09 |
| WO2014065493A1 (ko) | 2014-05-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6113293B2 (ja) | 脳卒中患者の歩行リハビリテーション用ロボット | |
| US10617906B2 (en) | Patient aid devices, particularly for mobile upper extremity support in railed devices such as parallel bars and treadmills | |
| US8968163B1 (en) | Unweighted therapy and training device | |
| CA2828420C (en) | Gait training device and gait training system | |
| JP5259629B2 (ja) | 身体障害者用の訓練器具 | |
| JP7365356B2 (ja) | 医療用歩行器 | |
| KR101280904B1 (ko) | 힙 조인트 보상용 메커니즘을 갖는 하지 재활 훈련 시스템 | |
| ES2905096T3 (es) | Exoesqueleto | |
| TW201639533A (zh) | 互動式外骨骼膝關節機器系統 | |
| US20120046578A1 (en) | Powered orthosis systems and methods | |
| US11406859B2 (en) | Gait pattern training device | |
| US20180177665A1 (en) | Devices enabling the disabled to stand, walk and activate one's body | |
| US20180000682A1 (en) | Physical therapy and walker apparatus | |
| KR101797967B1 (ko) | 하지 보조 보행기 | |
| CN108938325A (zh) | 下肢体康复训练机器人 | |
| KR101694848B1 (ko) | 환자의 재활 치료를 돕는 보행 재활 로봇 | |
| CN108652925B (zh) | 一种助行康复及步态矫正系统 | |
| JP2013116146A (ja) | 腕振り機能付き歩行器 | |
| JP2007111422A (ja) | 椅子 | |
| JP2018079132A (ja) | 下肢動作支援装具 | |
| JP3081786U (ja) | 手動式下肢関節曲げ器具 | |
| US11596828B1 (en) | Gait trainer attachment | |
| JPH0517064Y2 (ja) | ||
| JP2015029716A (ja) | 股関節刺激装置 | |
| Nagai et al. | A new powered orthosis with hip and ankle linkage for paraplegics walking |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150420 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160128 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160407 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160805 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170302 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170314 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6113293 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |