JP6027770B2 - 処置具、マニピュレータ、及び手術支援システム - Google Patents
処置具、マニピュレータ、及び手術支援システム Download PDFInfo
- Publication number
- JP6027770B2 JP6027770B2 JP2012116742A JP2012116742A JP6027770B2 JP 6027770 B2 JP6027770 B2 JP 6027770B2 JP 2012116742 A JP2012116742 A JP 2012116742A JP 2012116742 A JP2012116742 A JP 2012116742A JP 6027770 B2 JP6027770 B2 JP 6027770B2
- Authority
- JP
- Japan
- Prior art keywords
- pulley
- wire
- bending
- treatment
- driving force
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/50—Supports for surgical instruments, e.g. articulated arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Leader-follower robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/71—Manipulators operated by drive cable mechanisms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/77—Manipulators with motion or force scaling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2927—Details of heads or jaws the angular position of the head being adjustable with respect to the shaft
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/305—Details of wrist mechanisms at distal ends of robotic arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/061—Measuring instruments not otherwise provided for for measuring dimensions, e.g. length
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Heart & Thoracic Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Robotics (AREA)
- Biomedical Technology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Veterinary Medicine (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Pathology (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Manipulator (AREA)
- Surgical Instruments (AREA)
Description
マニピュレータには、関節などの可動部が設けられており、可動部が動作することによってマニピュレータは所望の姿勢に変位する。マニピュレータの可動部は、可動部へ動力を伝達する駆動源及び伝達部材と、可動部の変位量を検出する検出手段とによって上記所望の姿勢となるように制御される。
また、特許文献2には、関節を動作させる動力伝達用ワイヤと、関節の変位量を検出するために動力伝達用ワイヤに連結された変位センシング用ワイヤと、変位センシング用ワイヤの移動量を検出するセンサとを備えた変位量検出機構が開示されている。
このように、特許文献1,2に記載の構成では、湾曲部や関節などへ動力を伝達するワイヤの伸びの影響により、変位量を検出する精度が落ちるという問題がある。
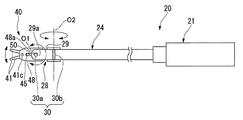
本発明の処置具、マニピュレータ及び手術支援システムについて説明する。図1は、本発明の第1実施形態の手術支援システムの全体図である。
まず、本実施形態の手術支援システム1の構成について説明する。
図1に示すように、本実施形態の手術支援システム1は、マスターアーム2とスレーブアーム10とからなる2種のアームを有し、マスターアーム2の動作に追従させるようにしてスレーブアーム10を遠隔制御するマスタースレーブ方式のシステムである。手術支援システム1には、患者Pに対して処置をする処置具20(図2参照)が取り付けられている。
切替器7は、たとえばスレーブアーム10の各々に対応する複数の押しボタンスイッチ8を有し、押下された押しボタンスイッチ8に対応した選択信号を入力処理回路6へ出力するようになっている。
また、入力処理回路6には、マスターアーム2とスレーブアーム10との動作比率を変更するスケーリング変更スイッチや、システムを緊急停止させたりするためのフットスイッチ等の操作部材が接続されていてもよい。
これにより、スレーブ制御回路13は、マスターアーム2の操作対象として特定されたスレーブアーム10等の動作を制御することができる。
操作者用ディスプレイ17及び助手用ディスプレイ18は、例えば液晶ディスプレイで構成されており、画像処理回路16において生成された画像データに基づく画像を表示する。
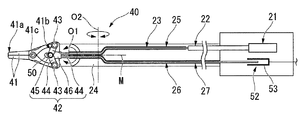
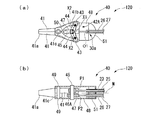
図2及び図3に示すように、処置具20は、いわゆる外科用手術器であり、駆動源21と、本体部24と、屈曲部28を有する処置部40と、変位量検出機構52とを備える。
センシング用ワイヤ26は、後述する固定部46に一端が固定され、他端が駆動源21内に配置されたワイヤである。本実施形態では、センシング用ワイヤ26は金属線材によって構成されている。
検出用ガイド部材27は、本体部24内におけるセンシング用ワイヤ26の経路を規定してセンシング用ワイヤ26をガイドする筒状部材である。検出用ガイド部材27は、たとえばコイルパイプや金属パイプによって形成されている。また、検出用ガイド部材27の内面とセンシング用ワイヤ26の外面とは、互いの摩擦が小さくなるような表面処理等が施されていてもよい。
駆動用ガイド部材25と検出用ガイド部材27とは、互いに干渉しないように離れた位置に設けられており、屈曲部28においては、互いに平行に配置されている。
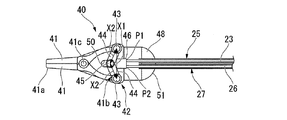
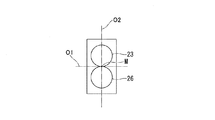
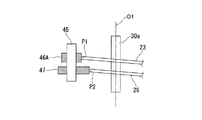
図3および図5に示すように、第一屈曲軸30aと第二屈曲軸30bとのそれぞれの近傍において、互いに平行な駆動ワイヤ23とセンシング用ワイヤ26との中央線Mは、第一屈曲軸30aの中心軸線O1と交差し、且つ第二屈曲軸30bの中心軸線O2と交差する。このような位置関係にすることで、固定部46に近い第一屈曲軸30a付近で、駆動ワイヤ、センシング用ワイヤが屈曲方向によって曲げ半径が違うことが避けられ、ワイヤへの屈曲による影響が屈曲方向によって異なることを避けることができる。なお、本明細書においては、駆動ワイヤ23とセンシング用ワイヤ26とを見やすくするために、実際には重なって図示されるべき駆動ワイヤ23とセンシング用ワイヤ26と紙面上下方向にずらして図示している。
このように、連結部材42は、ロッド22及び駆動ワイヤ23を介して駆動源21から伝達された駆動力を処置部40の動作に変換するリンクとして機能する。
さらに、ガイド固定部51は、駆動用ガイド部材25と固定部46との間及び検出用ガイド部材27と固定部46との間において駆動ワイヤ23とセンシング用ワイヤ26とが平行となるように、駆動用ガイド部材25と検出用ガイド部材27とを固定支持している。
手術支援システム1は、スレーブアーム10に処置具20が取り付けられた状態で使用される。
手術支援システム1の操作者Opは、マスターアーム2を操作して、スレーブアーム10及び処置具20を遠隔操作する。処置具20の使用時には、スレーブ制御回路13によって駆動源21が駆動され、駆動源21に接続されたロッド22が進退移動される。すると、ロッド22に固定された駆動ワイヤ23もロッド22と一体に進退移動されて、駆動ワイヤ23に固定された固定部46も進退移動される。固定部46が進退移動されることによって、一対のジョー41は開閉動作される。
次に、本発明の第2実施形態の処置具、マニピュレータ、及び手術支援システムについて説明する。なお、以下に説明する各実施形態において、上述した第1実施形態の処置具20、マニピュレータ(スレーブアーム10)、及び手術支援システム1と構成を共通とする箇所には同一符号を付けて、説明を省略する。図6は、本実施形態の処置具、マニピュレータ及び手術支援システムにおける処置具の一部の構成を示す模式図である。
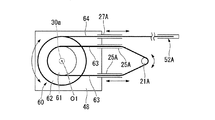
図6に示すように、第一屈曲軸30aは、直径が互いに異なる2枚のプーリ(第一プーリ61、第二プーリ62)が同軸状に重ねられた形状を有する多段プーリ60となっている。第一屈曲軸30aは、中間支持部材29に対しては多段プーリ60の回転軸回りに回動自在に支持されており、支持部材48に対しては固定されている。
さらに、屈曲用ガイド部材25Aから出て多段プーリ60へ向かう屈曲用ワイヤ63と、屈曲検出用ガイド部材27Aから出て多段プーリ60へ向かう屈曲検出ワイヤ64とは、何れも略直線的に、多段プーリ60との接点へ向かって伸びており、各プーリの接線に沿っている。
本実施形態では、屈曲用ワイヤ63が掛け回された第一プーリ61よりも屈曲検出ワイヤ64が掛け回された第二プーリ62の方が直径が大きく形成されている。このため、屈曲用ワイヤ63によって多段プーリ60が回転されると、屈曲用ワイヤ63の変位量よりも屈曲検出ワイヤ64の変位量の方が大きい。また、第1実施形態と同様に、屈曲検出ワイヤ64の変位量は、屈曲用ワイヤ63に牽引力がかかった場合の屈曲用ワイヤ63の伸びの影響を受けることなく、多段プーリ60の回転量が反映される。
さらに、開閉軸41cに対しても、本実施形態と同様に多段プーリ60を用いた構成を適用することができる。
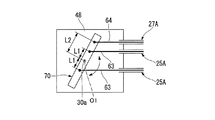
次に、上記第2実施形態の変形例について説明する。図7は、本変形例の構成を示す模式図である。
本変形例では、第一屈曲軸30a(図2参照)は、第2実施形態で説明した多段プーリ60ではなく、図7に示すように、第一屈曲軸30aの中心軸線と直交する一方向に延びて形成された梃子部70である点が異なっている。梃子部70は、第一屈曲軸30aの中心軸線O1が支点となり、梃子部70の長手方向に支点から等距離(第一距離L1)となる2点で屈曲用ワイヤ63と固定されている。さらに、屈曲用ワイヤ63と梃子部70との固定点と支点との距離(第一距離L1)よりも長い第二距離L2だけ支点(中心軸線O1)から離れた位置に、屈曲検出ワイヤ64が固定されている。
本変形例でも第2実施形態と同様の効果を奏する。
また、本変形例の場合には、梃子部70は棒状であるので、第2実施形態で説明した円板状の多段プーリ60よりもコンパクトな構成とすることができる。
さらに、本変形例では、屈曲用ワイヤ63が梃子部70に固定されているので、上記第2実施形態における第一プーリ61と屈曲用ワイヤ63との接触面積よりも小さい接触面積で第一プーリ61と屈曲用ワイヤ63とが接触している。このため、摩擦による駆動力の損失が少ない。
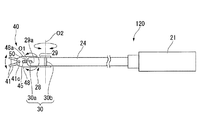
次に、本発明の第3実施形態の処置具、マニピュレータ及び手術支援システムについて説明する。本実施形態では、上述の各実施形態で説明した処置具20とは構成が異なる処置具120を有している点が異なっている。
連結部材42Aは、第1実施形態で説明した一対のリンク44と、一対のリンク44のそれぞれにピン45によって回動可能に連結された固定部46Aとを備える。
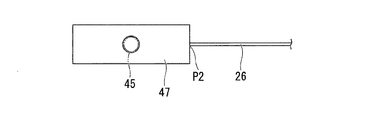
図10(B)及び図11に示すように、センシングリンク47は、ピン45が挿通される貫通孔を有する剛体であり、ピン45を介して駆動源21からの駆動力が伝達される。また、たとえば一対のジョー41の先端が駆動源21からの駆動力以外の外力を受けて開閉された場合に、当該外力が、一対のジョー41、ピン43、一対のリンク44、ピン45、センシングリンク47にこの順に伝わり、センシングリンク47が移動される。
図10(B)に示すように、センシングリンク47と固定部46Aとはピン45によって連結されているので、センシングリンク47と固定部46Aとは、僅かな遊びによるズレはあるものの概ね一体に動作する。すなわち、一対のジョー41を開閉動作させた場合には、センシングリンク47の変位量は固定部46Aの変位量と実質的に等しい。
さらに、ガイド固定部51は、駆動用ガイド部材25と固定部46Aとの間及び検出用ガイド部材27とセンシングリンク47との間において駆動ワイヤ23とセンシング用ワイヤ26とが平行となるように、駆動用ガイド部材25と検出用ガイド部材27とを固定支持している。
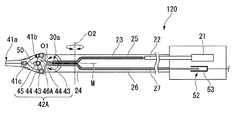
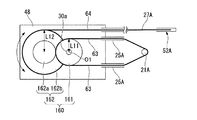
次に、本発明の第4実施形態の処置具、マニピュレータ、及び手術支援システムについて説明する。図12は、本実施形態の処置具、マニピュレータ及び手術支援システムにおける処置部の一部の構成を示す模式図である。
図12に示すように、第一屈曲軸30aは、直径が互いに異なる2枚のプーリ(第一プーリ161、第二プーリ162)が連結された形状を有するプーリ群160となっている。第一屈曲軸30aの中心軸線は、第一プーリ161の回転中心と一致している。
第一プーリ161は、中間支持部材29に対しては第一プーリ161の回転中心回りに回動自在に支持されており、支持部材48に対しては固定されている。第一プーリ161には、プーリ群160を回転させるための屈曲用ワイヤ63が巻き掛けられている。
第二プーリ162は、支持部材48に対して回転自在に連結されている。これにより、第一プーリ161が回転されることによって第二プーリ162も回転される。
さらに、第一プーリ161の直径は、第二プーリ162の係合部162aの直径よりも大きく設定されており、第一プーリ161を回転させたとき、第一プーリ161の回転角度よりも第二プーリ162の回転角度の方が大きくなる。
このため、本実施形態では、屈曲用ワイヤ63の変位量に対して屈曲検出ワイヤ64の変位量が大きい。
さらに、屈曲用ガイド部材25Aから出て第一プーリ161へ向かう屈曲用ワイヤ63と、屈曲検出用ガイド部材27Aから出て第二プーリ162の本体162bへ向かう屈曲検出ワイヤ64とは、何れも略直線的に、各プーリとの接点へ向かって伸びており、各プーリの接線に沿っている。
本実施形態では、屈曲用ワイヤ63が掛け回された第一プーリ161よりも屈曲検出ワイヤ64が掛け回された第二プーリ162の方が直径が大きく形成されている。また、第一プーリ161と第二プーリ162とは、第一プーリ161の回転角度に対して第二プーリ162の回転角度の方が大きくなるように係合部62aによって係合されている。このため、屈曲用ワイヤ63によって第一プーリ161が回転されると、屈曲用ワイヤ63の変位量よりも屈曲検出ワイヤ64の変位量の方が大きくなる。つまり、プーリ群160は、屈曲用ワイヤ63の移動量に対して屈曲検出ワイヤ64の移動量を増幅する増幅機構となっている。また、第1実施形態と同様に、屈曲検出ワイヤ64の変位量は、屈曲用ワイヤ63に牽引力がかかった場合の屈曲用ワイヤ63の伸びの影響を受けることなく、第二プーリ162の回転量が反映される。
さらに、開閉軸41cに対しても、本実施形態と同様にプーリ群160を用いた構成を適用することができる。
次に、本発明の第5実施形態の処置具、マニピュレータ及び手術支援システムについて説明する。図13は、本実施形態の処置具の一部の構成を示す模式図である。
処置具220は、連結部42Aが、固定部46A及びセンシングリンク47に代えて、永久磁石146Aを有する固定部146と、永久磁石147Aを有するセンシングリンク147とを有している。固定部146に設けられた永久磁石146Aとセンシングリンク147に設けられた永久磁石147Aとは、互いに引き合う向きとなるように磁極が配置されている。また、センシングリンク147には、上述の第3実施形態と同様に、センシング用ワイヤ26が固定されている。
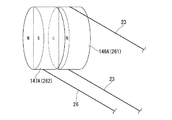
次に、本実施形態の処置具220の変形例について説明する。図14は、本実施形態の処置具の変形例の構成を示す模式図である。
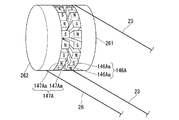
図14に示すように、本変形例では、処置部40は、固定部146及びセンシングリンク147に代えて、円板状に形成され永久磁石146Aを有する第一プーリ261と、円板状に形成され永久磁石147Aを有する第二プーリ262を有している。第一プーリ261と第二プーリ262とは、第2実施形態で説明した第一プーリ61及び第二プーリ62と同様に回転中心が同軸状となるように配置されている。また、第一プーリ261と第二プーリ262とは同径である。
本変形例では、第一プーリ261と第二プーリ262とは磁力によって非接触状態で連結されている。このような構成であっても、上述の第2実施形態と同様の効果を奏する。
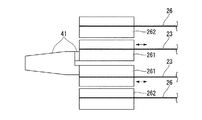
次に、本実施形態の他の変形例について説明する。図16は、本変形例の構成を示す模式図である。
本変形例では、一対のジョー41のそれぞれに対して、第一プーリ261及び第二プーリ262の組が設けられている。このような構成を有していると、一対のジョー41における各ジョーを独立して移動させることができる。
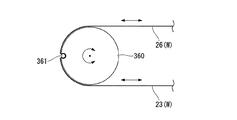
次に、本発明の第6実施形態の処置具、マニピュレータ及び手術支援システムについて説明する。図17は、本実施形態の処置具の一部の構成を示す模式図である。
本実施形態では、第一プーリ61及び第二プーリ62が設けられていた第2実施形態の構成に代えて、駆動ワイヤ23とセンシング用ワイヤ26とが共に固定されたプーリ360が設けられた構成となっている。
なお、駆動ワイヤ23とセンシング用ワイヤ26とは、別体のワイヤである必要はなく、一本のワイヤの中間部がプーリ360の周縁部に固定されていれば、当該一本のワイヤが駆動ワイヤ23及びセンシング用ワイヤ26として機能する。本実施形態では、一本のワイヤWがピン361に巻かれた状態でピン361に対してロウ付けあるいは溶接により固定され、ピン361がプーリ360に嵌め込まれることにより、ワイヤWがプーリ360に固定されている。なお、ワイヤWとプーリ360との固定方法はピン361を使用する方法には限られない。例えば、ワイヤWの外周面をプーリ360の外面に溶接、半田付け、あるいはロウ付けによって固定してもよい。
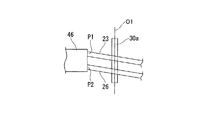
たとえば、上述の第1実施形態では、第一屈曲軸30aの中心軸線と、第二屈曲軸30bの中心軸線との両方に直交するように駆動ワイヤ23とセンシング用ワイヤ26が引き回されている例が開示されているが、第一屈曲軸30aや第二屈曲軸30bが中間支持部材29の長手方向(軸方向)と直交方向に伸びる柱状部材である場合には、柱状部材(第一屈曲軸30a)の外周に沿って、柱状部材(第一屈曲軸30a)の中心軸線O1に対してねじれの位置となるように駆動ワイヤ23とセンシング用ワイヤ26とが互いに略等しく近接されて引き回されていてもよい(図18参照)。この場合には、固定部46に近い第一屈曲軸30a付近で、駆動ワイヤ23、センシング用ワイヤ26が屈曲方向によって曲げ半径が違うことが避けられ、ワイヤ23,26への屈曲による影響が屈曲方向によって異なることを避けることができる。尚、柱状部材に対するワイヤ23,26の投影面が垂直になるのも良い。この場合が特に効果がある。
また、上述の各実施形態では、処置部の連結部として、処置部である一対のジョー41に対してリンク44、固定部46が設けられたものを例にとって説明したが、処置部と連結部材が一体であっても良い。この場合、例えば一対のジョー41のうち一方を固定とし、他方が開閉可能とすれば、その他方のジョー41の基端部が駆動ワイヤ23、センシング用ワイヤ26が固定される連結部材を成すことになり、ジョーと連結部材とは一体となる。
2 マスターアーム
3 リンク機構
4 リンク部材
5 位置検出器
6 入力処理回路
7 切替器
8 押しボタンスイッチ
9 手術台
10 スレーブアーム
11 多自由度関節
12 位置検出器
13 スレーブ制御回路
14 手術用動力伝達アダプタ
15 観察器具
16 画像処理回路
19 ディスプレイ
20,120 処置具
21,21A 駆動源
22 ロッド(駆動力伝達部材)
23 駆動ワイヤ(駆動力伝達部材)
24 本体部
25 駆動用ガイド部材
26 センシング用ワイヤ(作動量検出部材)
27 検出用ガイド部材
28 屈曲部
29 中間支持部材
30 屈曲軸
30a 第一屈曲軸
30b 第二屈曲軸
40 処置部
41 ジョー
41c 開閉軸
42 連結部(連結部材)
42A 連結部材(第一連結部材)
43 ピン
44 リンク
45 ピン
46,46A 固定部
48 支持部材
47 センシングリンク(第二連結部材)
49 軸支持部
50 長孔部
51 ガイド固定部
52、52A 変位量検出機構
53 センサ
60 多段プーリ
61 第一プーリ
62 第二プーリ
63 屈曲用ワイヤ(駆動力伝達部材)
64 屈曲検出ワイヤ(作動量検出部材)
70 梃子部
142 連結部
146 固定部
146A 永久磁石
146Aa 磁石片
147 センシングリンク
147A 永久磁石
147Aa 磁石片
160 プーリ群
161 第一プーリ
162 第二プーリ
261 第一プーリ
262 第二プーリ
360 プーリ
L1 第一距離
L2 第二距離
L11 第一距離
L12 第二距離
O1 中心軸線
O2 中心軸線
Op 操作者
P 患者
P1 固定位置
P2 固定位置
Claims (8)
- 駆動源が発する駆動力により処置部が作動する処置具であって、
前記駆動源に連結された線状の駆動力伝達部材と、
前記処置部に設けられ、前記駆動力伝達部材が接続され、前記駆動源から前記駆動力伝達部材を介して前記駆動力が伝達され該駆動力を前記処置部の動作に変換する連結部と、
前記連結部により移動される線状の作動量検出部材と、
を備え、
前記連結部は、
所定の支点を回動中心として回動可能であり前記所定の支点から第一距離だけ離間した外周に前記駆動力伝達部材が巻き掛けられた第一プーリと、
前記第一プーリの回転中心と同軸状に回転中心を有して回動可能であり前記第一プーリよりも直径が大きく前記第一距離よりも長い第二距離だけ前記所定の支点から離間した外周に前記作動量検出部材が巻き掛けられた第二プーリと、
を有し、
前記駆動力伝達部材は、前記第一プーリに固定され、
前記作動量検出部材は、前記第二プーリに固定されている
ことを特徴とする処置具。 - 請求項1に記載の処置具であって、
前記駆動力伝達部材をガイドする駆動用ガイド部材と、
前記作動量検出部材をガイドする検出用ガイド部材と、
前記駆動用ガイド部材及び前記検出用ガイド部材を固定支持する支持部材と、
を備えることを特徴とする処置具。 - 請求項2に記載の処置具であって、
前記支持部材は、
前記駆動用ガイド部材から前記第一プーリへ向かう前記駆動力伝達部材が、前記駆動用ガイド部材の先端から前記駆動力伝達部材と前記第一プーリとの接点へ向かう直線状となるように、前記駆動用ガイド部材を固定支持し、
前記検出用ガイド部材から前記第二プーリへ向かう前記作動量検出部材が、前記検出用ガイド部材の先端から前記作動量検出部材と前記第二プーリとの接点に向かう直線状となるように、前記検出用ガイド部材を固定支持する
ことを特徴とする処置具。 - 請求項2または3に記載の処置具であって、
前記支持部材は、前記駆動用ガイド部材と前記第一プーリとの間及び前記検出用ガイド部材と前記第二プーリとの間において前記駆動力伝達部材と前記作動量検出部材とが平行となるように、前記駆動用ガイド部材と前記検出用ガイド部材とを固定支持していることを特徴とする処置具。 - 請求項1から4の何れか一項に記載の処置具であって、
前記駆動力伝達部材及び前記作動量検出部材がともに屈曲される屈曲部が前記処置部と前記駆動源との間に設けられ、
前記屈曲部は、前記駆動源側に対して前記処置部側が所定の屈曲軸を中心として回動し、
前記駆動力伝達部材及び前記作動量検出部材は、前記屈曲軸近傍において前記屈曲軸との距離が互いに略等しくなるように配置されていることを特徴とする処置具。 - 請求項1から5のいずれか一項に記載の処置具であって、
前記駆動力伝達部材並びに前記作動量検出部材がワイヤであることを特徴とする処置具。 - 請求項1から6のいずれか一項に記載の処置具と、
前記処置具が取り付けられたアームと、
を備えることを特徴とするマニピュレータ。 - 請求項1から7のいずれか一項に記載の処置具を備える手術支援システム。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012116742A JP6027770B2 (ja) | 2011-06-30 | 2012-05-22 | 処置具、マニピュレータ、及び手術支援システム |
| EP12805135.6A EP2726010B1 (en) | 2011-06-30 | 2012-06-27 | Treatment tool, manipulator, and surgery support system |
| PCT/JP2012/067027 WO2013002414A1 (en) | 2011-06-30 | 2012-06-27 | Treatment tool, manipulator, and surgery support system |
| CN201280030182.6A CN103619279B (zh) | 2011-06-30 | 2012-06-27 | 处置工具、机械手和手术支持系统 |
| US14/138,216 US9770299B2 (en) | 2011-06-30 | 2013-12-23 | Treatment tool, manipulator, and surgery support system |
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011146796 | 2011-06-30 | ||
| JP2011146796 | 2011-06-30 | ||
| JP2011146797 | 2011-06-30 | ||
| JP2011146797 | 2011-06-30 | ||
| JP2012116742A JP6027770B2 (ja) | 2011-06-30 | 2012-05-22 | 処置具、マニピュレータ、及び手術支援システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013031637A JP2013031637A (ja) | 2013-02-14 |
| JP6027770B2 true JP6027770B2 (ja) | 2016-11-16 |
Family
ID=47424298
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012116742A Active JP6027770B2 (ja) | 2011-06-30 | 2012-05-22 | 処置具、マニピュレータ、及び手術支援システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9770299B2 (ja) |
| EP (1) | EP2726010B1 (ja) |
| JP (1) | JP6027770B2 (ja) |
| CN (1) | CN103619279B (ja) |
| WO (1) | WO2013002414A1 (ja) |
Families Citing this family (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011115311A1 (ko) * | 2010-03-15 | 2011-09-22 | 주식회사 아덴 | 수술기구 |
| JP6049585B2 (ja) * | 2013-10-31 | 2016-12-21 | オリンパス株式会社 | 術具 |
| JP5980764B2 (ja) * | 2013-11-29 | 2016-08-31 | オリンパス株式会社 | 術具 |
| CN104827465B (zh) * | 2015-05-08 | 2016-10-12 | 上海交通大学 | 一种具有高驱动速度和大驱动力的机械传动装置 |
| US10973595B2 (en) * | 2015-08-13 | 2021-04-13 | Siemens Healthcare Gmbh | Device and method for controlling a system comprising an imaging modality |
| ITUB20154977A1 (it) | 2015-10-16 | 2017-04-16 | Medical Microinstruments S R L | Strumento medicale e metodo di fabbricazione di detto strumento medicale |
| GB2552383B (en) * | 2016-07-22 | 2022-08-24 | Cmr Surgical Ltd | Gear packaging for robotic joints |
| CN113349932A (zh) | 2016-12-20 | 2021-09-07 | 威博外科公司 | 用于机器人外科系统的无菌适配器控制系统和通信接口 |
| WO2019092843A1 (ja) | 2017-11-10 | 2019-05-16 | オリンパス株式会社 | 医療用マニピュレータシステムとその作動方法 |
| CN108113751A (zh) * | 2017-12-28 | 2018-06-05 | 深圳市罗伯医疗科技有限公司 | 一种应用于内窥镜手术机器人的控制系统及方法 |
| CN109984777B (zh) * | 2017-12-29 | 2022-02-08 | 江苏木偶医疗科技有限公司 | 一种驱动结构及具有柔性关节的装置 |
| RU2682931C1 (ru) * | 2018-01-10 | 2019-03-22 | Федеральное государственное бюджетное образовательное учреждение высшего образования "Казанский национальный исследовательский технический университет им. А.Н. Туполева-КАИ" (КНИТУ-КАИ) | Интраоперационный торакальный анализатор кровотока |
| CN110236676B (zh) * | 2018-03-09 | 2021-02-02 | 深圳市精锋医疗科技有限公司 | 手术机器人 |
| WO2019207674A1 (ja) * | 2018-04-25 | 2019-10-31 | オリンパス株式会社 | 駆動装置および医療用マニピュレータ |
| US11553939B2 (en) | 2018-10-31 | 2023-01-17 | Cilag Gmbh International | Surgical instruments with a retention feature that retains a cutting element |
| US11406442B2 (en) | 2018-11-05 | 2022-08-09 | Cilag Gmbh International | Articulate wrist with flexible central member |
| JP6791516B1 (ja) * | 2019-10-17 | 2020-11-25 | リバーフィールド株式会社 | 手術ロボット用術具 |
| US12070208B2 (en) | 2019-12-30 | 2024-08-27 | Beijing Surgerii Robotics Company Limited | Surgical effector, surgical tool and surgical robot |
| EP4110221A1 (en) * | 2020-02-26 | 2023-01-04 | Covidien LP | Robotic surgical instrument including linear encoders for measuring cable displacement |
| CN113197673A (zh) * | 2021-04-28 | 2021-08-03 | 康诺思腾机器人(深圳)有限公司 | 输入设备和手术机器人 |
| KR102576536B1 (ko) * | 2021-07-15 | 2023-09-08 | 주식회사 엔도로보틱스 | 텐던-쉬스 구동 장치 |
| KR102576537B1 (ko) * | 2021-07-15 | 2023-09-08 | 주식회사 엔도로보틱스 | 텐던-쉬스 구동 장치 |
| CN115401722B (zh) | 2021-05-28 | 2026-03-13 | 恩多机器人技术有限公司 | 套索驱动装置 |
| WO2023287247A1 (ko) * | 2021-07-15 | 2023-01-19 | 주식회사 엔도로보틱스 | 이동 장치 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4500780A (en) * | 1983-01-03 | 1985-02-19 | Pitney Bowes Inc. | Apparatus and method for aligning postage meter components with an optical sensor |
| JPH04263831A (ja) | 1991-02-19 | 1992-09-18 | Olympus Optical Co Ltd | 内視鏡の挿入部湾曲形状検出装置 |
| JPH1110575A (ja) | 1997-06-26 | 1999-01-19 | Toshiba Mach Co Ltd | パラレルリンク機構 |
| JPH1177577A (ja) | 1997-09-02 | 1999-03-23 | Toshiba Mach Co Ltd | ワイヤ駆動式マニピュレータ |
| JP4117954B2 (ja) | 1998-12-14 | 2008-07-16 | 三菱プレシジョン株式会社 | 4軸のフォースフィードバックを有する力覚インタフェース装置 |
| WO2000040419A1 (en) * | 1999-01-07 | 2000-07-13 | Seiko Epson Corporation | Sensing mechanism, carriage monitor device, and printer comprising the same |
| JP4360860B2 (ja) | 2003-07-11 | 2009-11-11 | Hoya株式会社 | 内視鏡の湾曲操作装置 |
| JP2005349489A (ja) | 2004-06-08 | 2005-12-22 | Sharp Corp | 多自由度多指ハンド |
| ATE543455T1 (de) * | 2005-03-29 | 2012-02-15 | Toshiba Kk | Manipulator |
| JP4506716B2 (ja) * | 2006-04-24 | 2010-07-21 | トヨタ自動車株式会社 | 脚式ロボット |
| JP4960112B2 (ja) * | 2007-02-01 | 2012-06-27 | オリンパスメディカルシステムズ株式会社 | 内視鏡手術装置 |
| JP5090045B2 (ja) * | 2007-04-03 | 2012-12-05 | テルモ株式会社 | マニピュレータ及びその制御方法 |
| JP5042738B2 (ja) * | 2007-07-30 | 2012-10-03 | テルモ株式会社 | 医療用マニピュレータの作業機構及び洗浄方法 |
| US8224484B2 (en) * | 2007-09-30 | 2012-07-17 | Intuitive Surgical Operations, Inc. | Methods of user interface with alternate tool mode for robotic surgical tools |
| US9259274B2 (en) * | 2008-09-30 | 2016-02-16 | Intuitive Surgical Operations, Inc. | Passive preload and capstan drive for surgical instruments |
| JP2010220685A (ja) | 2009-03-19 | 2010-10-07 | Olympus Corp | マニピュレータ |
| JP5325621B2 (ja) | 2009-03-19 | 2013-10-23 | オリンパス株式会社 | マニピュレータの関節の変位量検出機構 |
| JP5559996B2 (ja) * | 2009-07-13 | 2014-07-23 | 富士フイルム株式会社 | 内視鏡装置及び内視鏡システム並びに内視鏡装置の作動方法 |
| JP2011089797A (ja) * | 2009-10-20 | 2011-05-06 | Olympus Corp | ロータリーエンコーダ及びそれを用いた医療用マニピュレータ |
-
2012
- 2012-05-22 JP JP2012116742A patent/JP6027770B2/ja active Active
- 2012-06-27 EP EP12805135.6A patent/EP2726010B1/en active Active
- 2012-06-27 WO PCT/JP2012/067027 patent/WO2013002414A1/en not_active Ceased
- 2012-06-27 CN CN201280030182.6A patent/CN103619279B/zh active Active
-
2013
- 2013-12-23 US US14/138,216 patent/US9770299B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP2726010B1 (en) | 2017-02-15 |
| CN103619279B (zh) | 2016-10-05 |
| EP2726010A4 (en) | 2015-08-19 |
| US9770299B2 (en) | 2017-09-26 |
| EP2726010A1 (en) | 2014-05-07 |
| JP2013031637A (ja) | 2013-02-14 |
| WO2013002414A1 (en) | 2013-01-03 |
| US20140107667A1 (en) | 2014-04-17 |
| CN103619279A (zh) | 2014-03-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6027770B2 (ja) | 処置具、マニピュレータ、及び手術支援システム | |
| US12133698B2 (en) | Electromechanical surgical system | |
| JP7603617B2 (ja) | パッシブ曲げモードを備えたアクティブ制御の操縦可能医用デバイス | |
| JP6049585B2 (ja) | 術具 | |
| JP6033516B1 (ja) | 医療用処置具 | |
| JP6001189B2 (ja) | マニピュレータ | |
| CN107530134B (zh) | 机电手术系统 | |
| JP6230430B2 (ja) | 術具及び医療用マニピュレータシステム | |
| JP5856817B2 (ja) | 医療用処置具およびこれを備えるマニピュレータ | |
| JP5980764B2 (ja) | 術具 | |
| JP2012187311A (ja) | 医療用処置具およびマニピュレータ | |
| JP6329528B2 (ja) | 処置具 | |
| WO2015012242A1 (ja) | マニピュレータシステム | |
| JP5325621B2 (ja) | マニピュレータの関節の変位量検出機構 | |
| US10085616B2 (en) | Endoscope system configured to prevent mis-insertion of treatment tool in channel and method of operating the same |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150319 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160216 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160408 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20160411 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20161004 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20161017 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6027770 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |