JP6001960B2 - 配光特性測定装置および配光特性測定方法 - Google Patents
配光特性測定装置および配光特性測定方法 Download PDFInfo
- Publication number
- JP6001960B2 JP6001960B2 JP2012184255A JP2012184255A JP6001960B2 JP 6001960 B2 JP6001960 B2 JP 6001960B2 JP 2012184255 A JP2012184255 A JP 2012184255A JP 2012184255 A JP2012184255 A JP 2012184255A JP 6001960 B2 JP6001960 B2 JP 6001960B2
- Authority
- JP
- Japan
- Prior art keywords
- axis
- light source
- detection unit
- distribution characteristic
- light distribution
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




























Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01J—MEASUREMENT OF INTENSITY, VELOCITY, SPECTRAL CONTENT, POLARISATION, PHASE OR PULSE CHARACTERISTICS OF INFRARED, VISIBLE OR ULTRAVIOLET LIGHT; COLORIMETRY; RADIATION PYROMETRY
- G01J1/00—Photometry, e.g. photographic exposure meter
- G01J1/02—Details
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01J—MEASUREMENT OF INTENSITY, VELOCITY, SPECTRAL CONTENT, POLARISATION, PHASE OR PULSE CHARACTERISTICS OF INFRARED, VISIBLE OR ULTRAVIOLET LIGHT; COLORIMETRY; RADIATION PYROMETRY
- G01J1/00—Photometry, e.g. photographic exposure meter
- G01J1/42—Photometry, e.g. photographic exposure meter using electric radiation detectors
- G01J1/4257—Photometry, e.g. photographic exposure meter using electric radiation detectors applied to monitoring the characteristics of a beam, e.g. laser beam, headlamp beam
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01J—MEASUREMENT OF INTENSITY, VELOCITY, SPECTRAL CONTENT, POLARISATION, PHASE OR PULSE CHARACTERISTICS OF INFRARED, VISIBLE OR ULTRAVIOLET LIGHT; COLORIMETRY; RADIATION PYROMETRY
- G01J1/00—Photometry, e.g. photographic exposure meter
- G01J1/02—Details
- G01J1/0242—Control or determination of height or angle information of sensors or receivers; Goniophotometry
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M11/00—Testing of optical apparatus; Testing structures by optical methods not otherwise provided for
- G01M11/02—Testing optical properties
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01J—MEASUREMENT OF INTENSITY, VELOCITY, SPECTRAL CONTENT, POLARISATION, PHASE OR PULSE CHARACTERISTICS OF INFRARED, VISIBLE OR ULTRAVIOLET LIGHT; COLORIMETRY; RADIATION PYROMETRY
- G01J1/00—Photometry, e.g. photographic exposure meter
- G01J1/42—Photometry, e.g. photographic exposure meter using electric radiation detectors
- G01J2001/4247—Photometry, e.g. photographic exposure meter using electric radiation detectors for testing lamps or other light sources
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Spectroscopy & Molecular Physics (AREA)
- Optics & Photonics (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Photometry And Measurement Of Optical Pulse Characteristics (AREA)
- Testing Of Optical Devices Or Fibers (AREA)
Description
まず、本実施の形態に従う配光特性測定装置の装置構成について説明する。本実施の形態に従う配光特性測定装置は、主として、光源のニアフィールド配光特性を測定する。後述するように、ニアフィールド配光特性は、光源の発光面の各位置において、いずれの方向に、いずれの強度で発光しているかを示す。
次に、本実施の形態に従う配光特性測定装置1の電気的構成について説明する。
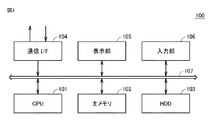
図2は、本実施の形態に従う配光特性測定装置1の電気的構成を示す模式図である。図2を参照して、配光特性測定装置1は、X軸モーター11、Y軸モーター12、および回転ミラー用モーター13、ならびに、検出部8に加えて、コンピュータ100およびトリガー装置110を含む。
図3は、図2に示すコンピュータ100の内部構成を示す模式図である。コンピュータ100は、典型的には、汎用のパーソナルコンピュータで構成される。より具体的には、図3を参照して、コンピュータ100は、CPU(Central Processing Unit)101と、主メモリ102と、HDD(Hard Disk Drive)103と、通信インターフェイス(Interface:I/F)104と、表示部105と、入力部106とを含む。これらのコンポーネントは、バス107を介して互いに通信可能に接続されている。
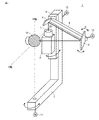
図1に示すように、本実施の形態に従う配光特性測定装置1は、1枚または複数枚のミラーを用いて光源10からの光路を折り返すことで、装置を小型に維持しつつ、発光面の比較的大きな光源の配光特性を測定できる。すなわち、配光特性測定装置1の支持部3の回転軸(中心軸)から光源10までの距離が短くても、その発光面が大きな光源10を検出部8で撮像できる。
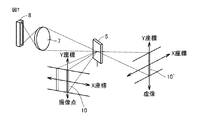
次に、本実施の形態に従う配光特性測定装置1についての理解を深めるために、照度計を用いた配光特性測定装置との光学系の相違について説明する。図5は、本実施の形態に従う配光特性測定装置1の光学系の違いを説明するための模式図である。
照度計を用いた場合には、ファーフィールド配光特性を測定することになる。この場合には、図5(a)に示すように、光源の発光面から照射される光を照度計で直接受光することで、当該光源の照度を測定する。この照度測定においては、照度計の受光面において受光した光の強度を測定することになる。測定対象の光源から放射される光が発散光である場合、照度計と光源との間の距離を大きくすれば、照度計で受光される光は暗くなる。また、照度計における指向性(受光感度特性)は制御されないので、光源から放射される光は、遮るものがない限り、そのすべてが照度計で受光されることになる。
これに対して、本実施の形態に従う配光特性測定装置1は、ニアフィールド配光特性を測定することになる。この場合には、図5(b)に示すように、レンズを用いて検出部における指向性が制御される。すなわち、光源から照射された光は、レンズで集光されて検出部に入射する。これは、検出部の焦点を光源の発光面に合わせることを意味しており、これにより、検出部は、光源の発光面の画像を捉えることになる。つまり、レンズを用いて検出部における指向性を制御された光源の発光面の明るさを測定することになり、当該光源の輝度を測定することになる。すなわち、配光特性測定装置1は、検出部の焦点を光源の発光面に合わせるためのレンズを含む。
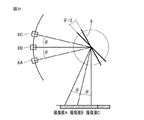
次に、本実施の形態に従う配光特性測定装置1についての理解を深めるために、照度計を用いた配光特性測定装置との回転平面ミラーの相違について説明する。図6は、本実施の形態に従う配光特性測定装置1の回転平面ミラーの違いを説明するための模式図である。
照度計を用いて配光特性測定を行なう場合には、測定対象の光源を点とみなせる距離に検出部を配置して測定する必要がある。例えば、図6に示すような検出部8−1が用いられる。この場合、本実施の形態に従う配光特性測定装置1と同様に、「ミラーで光路を折り返す」方法を採用する場合を考える。この場合、図6に示すような回転平面ミラー5−1を用いて、検出部8−1に代えて検出部8−3を配置する。上述したように、光源から放射される光は検出部に入射する必要がある。そのため、ミラーを用いて光路を折り返す場合、検出部8−1(あるいは、検出部8−3)で受光できる範囲(撮像範囲)を包含する大きさを有する回転平面ミラー5−1を用いて、光路を折り返す必要がある。言い換えれば、回転平面ミラー5−1の大きさを検出部8−1で受光できる範囲より小さくした場合には、光源から放射される光の一部が入射しないことになるので、当該光源の照度を正しく測定できない。
これに対して、光源の輝度を測定することで配光特性を算出する場合には、照度計を用いて配光特性測定を行なう場合とは異なり、測定対象の光源を点とみなせる距離に検出部を配置して測定する必要はない。むしろ、レンズの特性を適切に設定することで、光源の全体を測定できる距離L2(すなわち、光源全体を撮像できる距離)に検出部8−1を配置して測定を行なうことができる。ここで、「ミラーで光路を折り返す」方法を採用する場合を考えると、検出部8−1と光源全体とを結ぶ画角を包含できる大きさを有する回転平面ミラー5−1を用いて、光路を折り返す必要がある。
次に、光源10の表面輝度を測定するための検出部8および回転平面ミラー5について説明する。
本実施の形態に従う配光特性測定装置1の検出部8は、点センサー、ラインセンサー、およびエリアセンサーのいずれでもあってもよい。このようなセンサーについて、レンズ7を用いて測定立体角を制御することで、その焦点を光源10の発光面に合わせて測定が行なわれる。
まず、ラインセンサーを用いて、光源10の表面輝度を測定する方法について説明する。図1に示す検出部8として、その測定立体角がレンズ7によって制御されるラインセンサーが配置されているとする。光源10から放射された光は、回転平面ミラー5によって折り返されて検出部8に入射する。この測定時において、回転平面ミラー5を回転させることで、検出部8の撮像範囲を拡大する。
次に、エリアセンサーを用いて、光源10の表面輝度を測定する方法について説明する。図1に示す検出部8として、エリアセンサーが配置されているとする。光源10から放射された光は、回転平面ミラー5によって折り返されて検出部8に入射する。この測定時において、回転平面ミラー5を回転させることで、検出部8の撮像範囲を拡大する。
次に、本実施の形態に従う配光特性測定装置1を用いて光源10の配光特性を測定する場合の処理手順について説明する。
まず、典型的な処理手順として、支持部3およびアーム4を駆動して、検出部8および回転平面ミラー5を各測定位置へ位置決めした状態で、回転平面ミラー5を回転させて測定を行なう場合の処理例について説明する。この処理例は、検出部8として、ラインセンサーおよびエリアセンサーのいずれを用いた場合にも適用可能である。
次に、回転平面ミラー5の回転角度を先に設定しておき、その状態でX軸およびY軸のトレースを行なう処理例について説明する。このような処理を行なうことで、検出部8および回転平面ミラー5を各測定位置で停止させる必要がなく、連続的に測定することもできる。この処理例は、検出部8として、エリアセンサーを用いた場合に好適である。
次に、図13および図14のステップS8に示すデータ格納処理の詳細について説明する。図15は、図13および図14のステップS8に示すデータ格納処理の処理手順を示すフローチャートである。
(h1:検出部8の撮像範囲内の観測点の選択処理および測定値の取得処理)
まず、図15のステップS801およびS810に示す撮像範囲内の観測点の選択処理、ならびにステップS807に示す測定値の取得処理について説明する。図16は、図15に示す撮像範囲内の観測点の選択処理および測定値の取得処理を説明するための図である。
次に、図15のステップS804に示す測定空間座標値の算出処理について説明する。図17は、図15に示す測定空間座標値の算出処理を説明するための図である。図17には、一例として、まず、初期位置AがX軸に関して移動角度(X軸移動角度)φxだけ回転して位置Bへ移動し、さらに、Y軸に関して移動角度(Y軸移動角度)φyだけ回転して位置Cへ移動した場合を考える。
yb=ya
zb=xa×sinφx−za×cosφx
図17(b)に示すように、さらにY軸移動後の位置Cの座標値(xc,yc,zc)は、次のように算出される。まず、X軸移動後の位置Bと中心座標との距離Rは、以下のようになる。
また、位置Bと中心座標のY軸とのなす角度θは、以下のようになる。
これらの値を利用して、Y軸移動後の位置Cの座標値(xc,yc,zc)は、以下のようになる。
yc=R×cos(φy+θ)
zc=R×sin(φy+θ)
X軸方向および/またはY軸方向のいずれの回転であっても、上述と同様の方法で順次算出できる。
次に、図15のステップS805に示す測定角度の算出処理について説明する。図18および図19は、図15に示す測定角度の算出処理を説明するための図である。より具体的には、図18は見込み角度の算出方法を示し、図19は移動角度から測定角度を算出する方法を示す。
θy=atan{(yv−pyc)/(zv−pzc)}
次に、図19に示すような手順に従って、観測点Vの移動角度から測定角度が算出される。例えば、観測点VがX軸に関して移動角度(X軸移動角度)φxだけ回転したとする。このX軸に関した回転によって、初期状態の観測点Vが観測点V’(xv’,yv,zv’)に移動したとする。移動後の観測点V’の空間座標は、回転移動量と測定座標との関係から算出される。観測点V’の見込み角度θx’は、以下の式で算出される。
さらに、上述の<F.光源の表面輝度の測定方法>の欄において説明したように、回転平面ミラー5の回転に伴う見込み角度αおよびβを考慮する必要がある。
次に、図15のステップS806に示す測定撮像座標値の算出処理について説明する。図20は、図15に示す測定撮像座標値の算出処理を説明するための図である。
θpx=atan((pzc−zv)/xv)
θpy=atan((pzc−zv)/yv)
検出部8の撮像面(撮像空間座標)は、Z座標が0であるX−Y平面と仮定する。このとき、撮像面上の撮像座標値C(xc,yc,zc)は、撮像角度θpxおよびθpyから以下の式で算出される。
yc=pzc×tanθpy
zc=0
検出部8上の座標に対応する座標は、以下の式で算出される。
py=yc×(ccd_y_num/height)
但し、ccd_x_numおよびccd_y_numは、それぞれ検出部8の横側画素数および縦側画素数を示し、widthおよびheightは、それぞれ撮像範囲の横幅および縦幅を示す。
次に、図15のステップS807に示す測定値の取得処理およびステップS808に示す測定値の格納処理について説明する。図21および図22は、図15に示す測定値の取得処理および格納処理を説明するための図である。
<I.照度算出処理>
次に、図13および図14のステップS11に示す照度算出処理の詳細について説明する。この照度算出処理においては、算出対象の位置に入射する光源からの光線(輝度)をその配光特性を考慮して合算することで、当該位置における照度を算出する。そのため、照度を算出する位置に入射する観測点を特定するとともに、各観測点の見込み角度を反映して、その輝度を合算する処理を実行する。
まず、図23のステップS1101に示す照度算出位置の決定処理について説明する。図24は、図23に示す照度算出位置の決定処理を説明するための図である。
次に、図23のステップS1103に示す照度算出位置に対する観測点の見込み角度の算出処理について説明する。図25は、図23に示す照度算出位置に対する観測点の見込み角度の算出処理を説明するための図である。
Θy=atan{(yg−yv)/(zg−zv)}
(i3:見込み角度の輝度の検索処理)
次に、図23のステップS1104に示す見込み角度の輝度の検索処理について説明する。図26は、図23に示す見込み角度の輝度の検索処理を説明するための図である。
次に、図23のステップS1105に示す観測点における輝度の算出処理について説明する。図27は、図23に示す観測点における輝度の算出処理を説明するための図である。
次に、図23のステップS1106に示す照度格納データへの光度の加算処理について説明する。図28は、図23に示す照度格納データへの光度の加算処理を説明するための図である。ある照度算出位置における照度は、当該照度算出位置に入射する光の強度(光度)の総和として算出できる。
距離dについては、照度算出位置G(xg,yg,zg)と各観測点の座標値とに応じて順次算出される。
上述の配光特性測定装置1では、単一の検出部8を用いる構成について例示したが、複数の検出部8を用いる構成を採用してもよい。
検出部8Bが取得した画像データの座標(x,y)における光強度:B(x,y)
検出部8Cが取得した画像データの座標(x,y)における光強度:C(x,y)
ここで、光強度:A(x,y)は色度Xデータに相当し、光強度:B(x,y)は色度Yデータに相当し、光強度:C(x,y)は色度Zデータに相当する。
色度x=A(x,y)/(A(x,y)+B(x,y)+C(x,y))
見込み角および観測点の算出方法は、1つの検出部8を用いる場合と同様である。このような色度算出処理は、ディスプレイなどの視野角特性を測定する場合に有利になる。
上述の図7および図9には、回転平面ミラー5を紙面縦方向の軸方向に関して回転させる構成を例示するが、この回転方向は紙面横方向であってもよい。さらに、回転平面ミラー5を2つの軸に関してそれぞれ独立に回転させてもよい。回転軸を増やすことで、撮像範囲をより拡大できる。
本実施の形態に従う配光特性測定装置は、光源10から照射される光を回転平面ミラー5が反射して(折り返して)検出部8へ導く構成を採用する。このような構成を採用することで、光源10から検出部8までの距離を短縮できる。これによって、回転軸(中心軸)から回転平面ミラー5までの距離を長くする必要がなく、検出部8および回転平面ミラー5の回転半径を小さくできるので、装置をより小型化および軽量化できる。
Claims (9)
- 光源の配光特性を測定するための配光特性測定装置であって、
前記光源からの光を検出する検出部と、
前記光源からの光を反射して前記検出部へ導くためのミラーと、
前記検出部および前記ミラーを一体として、前記光源を通る第1軸および前記第1軸に直交しつつ前記光源を通る第2軸に関してそれぞれ自在に、前記光源に対して相対回転移動させる移動機構と、
前記光源から前記検出部までの光路長を維持しつつ前記ミラーを前記第2軸と平行な第3軸に関して回転させる回転機構と、
前記光源に関して、前記第1軸に関する回転角度および前記第2軸に関する回転角度を異ならせて、前記ミラーを複数の測定位置に配置するとともに、各測定位置において前記ミラーを前記第3軸に関して異なる回転角度に回転させることで前記検出部によって検出される複数の測定結果に基づいて、前記光源の配光特性を算出する演算部とを備える、配光特性測定装置。 - 前記回転機構は、前記ミラーが前記第3軸に関する第1の回転角度にある場合の前記検出部の撮像視野と、前記ミラーが前記第3軸に関する第2の回転角度にある場合の前記検出部の撮像視野とが互いに重複しないように、前記ミラーの回転角度を制御する、請求項1に記載の配光特性測定装置。
- 前記演算部は、前記ミラーの前記第3軸に関する回転角度に関連付けて、前記検出部の前記光源に対する見込み角を算出する、請求項1または2に記載の配光特性測定装置。
- 前記検出部の焦点を前記光源の発光面に合わせるためのレンズをさらに備える、請求項1〜3のいずれか1項に記載の配光特性測定装置。
- 前記ミラーから前記検出部までの光路上に配置される第2のミラーをさらに備える、請求項1〜4のいずれか1項に記載の配光特性測定装置。
- 前記検出部は、前記ミラーの回転中心に対して、所定の所定規則に従って配置された複数の検出面を含む、請求項1〜5のいずれか1項に記載の配光特性測定装置。
- 前記回転機構は、前記ミラーの回転中心について隣接する2つの検出面がなす角度の半分の角度ずつ、前記ミラーを回転させる、請求項6に記載の配光特性測定装置。
- 前記演算部は、前記第1軸に関する回転角度と前記第2軸に関する回転角度とに関連付けて、測定結果を格納する、請求項1〜7のいずれか1項に記載の配光特性測定装置。
- 光源の配光特性を測定するための配光特性測定方法であって、
前記光源に関して、前記光源からの光を検出する検出部、および、前記光源からの光を反射して前記検出部へ導くためのミラーを一体として、前記光源を通る第1軸および前記第1軸に直交しつつ前記光源を通る第2軸に関してそれぞれ自在に、前記光源に対して相対回転移動させることで、複数の測定位置に配置するステップと、
各測定位置において、前記光源から前記検出部までの光路長を維持しつつ前記ミラーを前記第2軸と平行な第3軸に関して異なる角度に回転させるステップと、
前記検出部によって検出される複数の測定結果に基づいて、前記光源の配光特性を算出するステップとを備える、配光特性測定方法。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012184255A JP6001960B2 (ja) | 2012-08-23 | 2012-08-23 | 配光特性測定装置および配光特性測定方法 |
| TW102129419A TWI610064B (zh) | 2012-08-23 | 2013-08-16 | 配光特性量測裝置以及配光特性量測方法 |
| KR1020130098562A KR20140026273A (ko) | 2012-08-23 | 2013-08-20 | 배광 특성 측정 장치 및 배광 특성 측정 방법 |
| US13/970,607 US8982341B2 (en) | 2012-08-23 | 2013-08-20 | Light distribution characteristic measurement apparatus and light distribution characteristic measurement method |
| EP13181156.4A EP2700921B1 (en) | 2012-08-23 | 2013-08-21 | Light distribution characteristic measurement apparatus and light distribution characteristic measurement method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012184255A JP6001960B2 (ja) | 2012-08-23 | 2012-08-23 | 配光特性測定装置および配光特性測定方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014041091A JP2014041091A (ja) | 2014-03-06 |
| JP6001960B2 true JP6001960B2 (ja) | 2016-10-05 |
Family
ID=49036431
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012184255A Active JP6001960B2 (ja) | 2012-08-23 | 2012-08-23 | 配光特性測定装置および配光特性測定方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8982341B2 (ja) |
| EP (1) | EP2700921B1 (ja) |
| JP (1) | JP6001960B2 (ja) |
| KR (1) | KR20140026273A (ja) |
| TW (1) | TWI610064B (ja) |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104713638B (zh) * | 2015-01-21 | 2018-01-19 | 北京科技大学 | 一种柱面光度测量装置及方法 |
| DE102015201093A1 (de) | 2015-01-22 | 2016-07-28 | Lmt Lichtmesstechnik Gmbh Berlin | Verfahren und Gonioradiometer zur richtungsabhängigen Messung mindestens einer lichttechnischen oder radiometrischen Kenngröße einer optischen Strahlungsquelle |
| US11425357B2 (en) | 2015-02-13 | 2022-08-23 | Carnegie Mellon University | Method for epipolar time of flight imaging |
| US11493634B2 (en) | 2015-02-13 | 2022-11-08 | Carnegie Mellon University | Programmable light curtains |
| US11972586B2 (en) | 2015-02-13 | 2024-04-30 | Carnegie Mellon University | Agile depth sensing using triangulation light curtains |
| US11747135B2 (en) | 2015-02-13 | 2023-09-05 | Carnegie Mellon University | Energy optimized imaging system with synchronized dynamic control of directable beam light source and reconfigurably masked photo-sensor |
| WO2019182784A1 (en) * | 2018-03-23 | 2019-09-26 | Carnegie Mellon University | Programmable light curtains |
| JP6717564B2 (ja) * | 2015-02-16 | 2020-07-01 | 大塚電子株式会社 | 配光特性測定装置および配光特性測定方法 |
| JP6394513B2 (ja) * | 2015-06-18 | 2018-09-26 | 新東工業株式会社 | 残留応力測定装置及び残留応力測定方法 |
| CN105043534B (zh) * | 2015-07-27 | 2017-06-20 | 湖南省交通科学研究院 | 一种横向调整式道路照明亮度测试装置及测试方法 |
| JP6997593B2 (ja) | 2017-11-06 | 2022-01-17 | 大塚電子株式会社 | 光学特性測定方法および光学特性測定システム |
| CN109642820B (zh) * | 2017-12-22 | 2021-12-07 | 深圳配天智能技术研究院有限公司 | 光传感装置、检测系统及检测方法 |
| CN108398245A (zh) * | 2018-05-28 | 2018-08-14 | 南昌大学 | 一种同心发散光源的检测方法与装置 |
| CN109632097A (zh) * | 2019-02-19 | 2019-04-16 | 广东蚂标检测技术有限公司 | 一种分布式光度计的测试装置及使用方法 |
| JP2020153713A (ja) * | 2019-03-18 | 2020-09-24 | 大塚電子株式会社 | 発光体計測装置及び発光体計測方法 |
| DE102020107457B4 (de) | 2020-03-18 | 2025-11-06 | Instrument Systems Gmbh | Messvorrichtung zur Vermessung von optischen Strahlungsquellen und Verfahren zur Durchführung einer Vermessung |
| US12247881B2 (en) * | 2020-08-25 | 2025-03-11 | Sapphire Ip, Inc. | Apparatus and method for measuring far-field luminous intensity and color characteristics of light sources |
| CN112284522B (zh) * | 2020-09-23 | 2022-10-21 | 宇龙计算机通信科技(深圳)有限公司 | 光线传感器的测试方法、装置、存储介质及电子设备 |
| US12372624B2 (en) | 2021-03-24 | 2025-07-29 | Waymo Llc | Optical sensor for mirror zero angle in a scanning lidar |
| CN113252311B (zh) * | 2021-05-06 | 2022-08-05 | 深圳市帝显电子有限公司 | 一种背光源检测装置 |
| CN115307876B (zh) * | 2022-08-04 | 2023-04-18 | 长沙思木锐信息技术有限公司 | 一种近远场共光路光学探测系统、构建方法和成像方法 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62250325A (ja) | 1986-04-23 | 1987-10-31 | Matsushita Electric Ind Co Ltd | 配光測定装置 |
| US5253036A (en) * | 1991-09-06 | 1993-10-12 | Ledalite Architectural Products Inc. | Near-field photometric method and apparatus |
| JPH09203691A (ja) | 1996-01-26 | 1997-08-05 | Honda Motor Co Ltd | 配光パターン等の測定方法及び装置 |
| US5914777A (en) * | 1997-01-20 | 1999-06-22 | Minolta Co., Ltd. | Apparatus for and method of measuring a distribution of luminous intensity of light source |
| JPH10206231A (ja) * | 1997-01-20 | 1998-08-07 | Minolta Co Ltd | 配光測定装置 |
| JP3757723B2 (ja) | 1999-12-17 | 2006-03-22 | 松下電工株式会社 | 測定方法 |
| JP3421299B2 (ja) * | 2000-03-28 | 2003-06-30 | 科学技術振興事業団 | 輝度の視野角依存性ならびに場所依存性測定装置及びその測定方法 |
| ES2187384B1 (es) | 2001-11-28 | 2004-06-16 | Centro De Tecnologias De Las Comunicaciones, S.A | Goniofotometro de doble reflexion. |
| JP2003247888A (ja) * | 2002-02-22 | 2003-09-05 | Yazaki Corp | 配光測定器 |
| DE102004037355A1 (de) * | 2004-07-30 | 2006-03-23 | Patent-Treuhand-Gesellschaft für elektrische Glühlampen mbH | Goniophotometer |
| WO2007140585A1 (en) * | 2006-06-05 | 2007-12-13 | Tir Technology Lp | Apparatus and method for determining characteristics of a light source |
| CN101158600A (zh) * | 2007-06-05 | 2008-04-09 | 杭州远方光电信息有限公司 | 分布光度计 |
| CN101236128B (zh) * | 2008-02-04 | 2013-05-08 | 杭州浙大三色仪器有限公司 | 分布光度计 |
| CN201600187U (zh) * | 2010-01-13 | 2010-10-06 | 杭州新叶光电工程技术有限公司 | 一种分布式光度计灯具定位自适应装置 |
| TWI461662B (zh) * | 2010-10-01 | 2014-11-21 | B & M Optics Co Ltd | 光學特性量測系統 |
| TWI454669B (zh) * | 2011-01-27 | 2014-10-01 | B & M Optics Co Ltd | 光學特性量測系統 |
-
2012
- 2012-08-23 JP JP2012184255A patent/JP6001960B2/ja active Active
-
2013
- 2013-08-16 TW TW102129419A patent/TWI610064B/zh active
- 2013-08-20 KR KR1020130098562A patent/KR20140026273A/ko not_active Ceased
- 2013-08-20 US US13/970,607 patent/US8982341B2/en active Active
- 2013-08-21 EP EP13181156.4A patent/EP2700921B1/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US8982341B2 (en) | 2015-03-17 |
| TW201418676A (zh) | 2014-05-16 |
| TWI610064B (zh) | 2018-01-01 |
| US20140055779A1 (en) | 2014-02-27 |
| JP2014041091A (ja) | 2014-03-06 |
| KR20140026273A (ko) | 2014-03-05 |
| EP2700921B1 (en) | 2020-10-28 |
| EP2700921A1 (en) | 2014-02-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6001960B2 (ja) | 配光特性測定装置および配光特性測定方法 | |
| JP5944719B2 (ja) | 配光特性測定装置および配光特性測定方法 | |
| WO2014207983A1 (ja) | 距離測定装置 | |
| JP2015060296A (ja) | 空間座標特定装置 | |
| JP7614264B2 (ja) | 情報処理装置、情報処理方法、及びプログラム | |
| JP7436509B2 (ja) | 情報処理装置、撮像装置、情報処理方法、及びプログラム | |
| CN108072335A (zh) | 三维形状测量装置 | |
| US10551174B2 (en) | Calibration method of image measuring device | |
| KR102122275B1 (ko) | 배광 특성 측정 장치 및 배광 특성 측정 방법 | |
| CN106055087A (zh) | 位置检测装置和位置检测方法 | |
| JP6037254B2 (ja) | 表面形状測定装置及び表面形状測定方法 | |
| JP2002022424A (ja) | 3次元測定装置 | |
| US11131543B2 (en) | Three-dimensional measuring apparatus and robot system | |
| WO2024004166A1 (ja) | 距離測定装置 | |
| JP6315127B2 (ja) | 入力装置、空中像インタラクションシステム、及び入力方法 | |
| JP2018021829A (ja) | 投影装置、計測装置、システム、および物品の製造方法 | |
| JP6170030B2 (ja) | 方向調整装置、方向調整方法、方向調整プログラム、及び、光無線装置 | |
| JP2020039418A (ja) | 支援装置、内視鏡システム、支援方法、及び支援プログラム | |
| JP2016110535A (ja) | 位置検出装置、画像投写装置及び画像操作システム | |
| JP2013050764A (ja) | 光学式位置検出装置、位置検出システムおよび入力機能付き表示システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150707 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160229 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160301 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160408 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160621 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160628 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160830 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160902 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6001960 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |