JP5987723B2 - 通信用スレーブ - Google Patents
通信用スレーブ Download PDFInfo
- Publication number
- JP5987723B2 JP5987723B2 JP2013029034A JP2013029034A JP5987723B2 JP 5987723 B2 JP5987723 B2 JP 5987723B2 JP 2013029034 A JP2013029034 A JP 2013029034A JP 2013029034 A JP2013029034 A JP 2013029034A JP 5987723 B2 JP5987723 B2 JP 5987723B2
- Authority
- JP
- Japan
- Prior art keywords
- communication
- task
- counter
- value
- abnormality
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000004891 communication Methods 0.000 title claims description 64
- 238000001514 detection method Methods 0.000 claims description 58
- 230000005856 abnormality Effects 0.000 claims description 47
- 230000010355 oscillation Effects 0.000 claims description 47
- 238000012544 monitoring process Methods 0.000 claims description 24
- 230000005540 biological transmission Effects 0.000 claims description 16
- 238000005259 measurement Methods 0.000 claims description 13
- 238000012545 processing Methods 0.000 claims description 13
- 238000000034 method Methods 0.000 description 12
- 230000008569 process Effects 0.000 description 10
- 230000006870 function Effects 0.000 description 7
- 238000010586 diagram Methods 0.000 description 5
- 239000013078 crystal Substances 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000001360 synchronised effect Effects 0.000 description 3
- 230000007423 decrease Effects 0.000 description 2
- 230000002159 abnormal effect Effects 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
Images








Landscapes
- Debugging And Monitoring (AREA)
- Information Transfer Systems (AREA)
Description
例えば特許文献1には、複数のタスクを時分割並行的に実施可能なマイクロコンピュータシステムにおいて、周期的に実行される最重要タスクにウォッチドッグタイマに類似した機能を持たせることで、暴走を短時間に検知する技術が開示されている。
そして、計測カウンタにより、マスタが周期的に送信する同期信号の受信間隔を、発振回路が出力するクロック信号に基づくカウント動作により計測し、複数のタスクの何れか1つである発振異常監視タスクは、モニタ用レジスタに格納されている計測カウンタの計測値を読み出して、当該計測値が正常範囲を超えると発振回路の異常を検知する。したがって、マスタとの間で非同期式通信を行う構成においても、同期信号の受信間隔を発振回路が出力するクロック信号に基づき計測することで、発振回路の異常を検知できる。
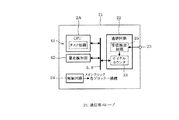
以下、第1実施形態について説明する。本実施形態の通信用スレーブは、特許文献1に開示されているマイクロコンピュータ41に通信機能等を追加したもので構成されている。図7は、特許文献1の図7相当図である。マイコン(マイクロコンピュータシステム)41は、CPU2A,内蔵メモリ3,暴走検知部42などから構成されており、これらは、アドレスバス5,データバス6を介して互いに接続されている。
また、他方のタスクXは、数値演算処理などを行なうのに適したタスクであり、分岐命令の実行も許可されている。そして、タスクXは、タスクSのループ周回回数によって計時される時間を利用した処理も行なう。
以下、第1実施形態と同一部分には同一符号を付して説明を省略し、異なる部分について説明する。図8に示すように、第2実施形態は、図6に示すフローチャートのステップS14をS14’に置き換えたもので、モニタ用サイクル数レジスタ50のレジスタ値が正常範囲内であれば、異常検知カウンタをデクリメントする(尚、カウンタ値が「0」であれば「0」を維持する)。異常検知カウンタは、正常範囲外であればステップS16でインクリメントされるので、そのように増減を行った結果としてカウンタ値が所定値に達すれば、ステップS18で異常検知処理が行われる。この様な第2実施形態による場合も、第1実施形態と同様の効果が得られる。
図9に示すように、第3実施形態は、図5に示す初期設定処理にステップS4,S5を追加したものである。すなわち、初期設定処理の最初はコマンドモードとなり、マスタより周期設定コマンドが送信される(S4)。周期設定コマンドには、同期信号の出力周期を示すデータが含まれている。各スレーブは上記コマンドを受信して周期データを取得すると、それに許容範囲を加減することで判定用の「正常範囲」を設定する(S5)。
第4実施形態は、図10に示す正常範囲設定処理を実行する。すなわち、最初に検出フラグがセットされて(S21:YES)、モニタ用サイクル数レジスタ50のレジスタ値を取得すると(S22)、そのレジスタ値(初期サイクル数)に基づいて正常範囲を設定する(S23)。すなわち、実際の同期信号の出力間隔を最初に計測した値に基づいて正常範囲を設定する。このような第4実施形態による場合も、第3実施形態と同様の効果が得られる。
同期信号の出力周期については、個別の設計に応じて適宜設定すれば良い。
検出フラグがセットされるとCPU2Aに割り込みを発生させて、その割り込みにより発振異常監視処理を行うようにしても良い。
計測カウンタと待機時間カウンタとを別個に設けても良い。
ANDゲート36及びモニタ許可レジスタ37は、必要に応じて設ければ良い。
マスタとスレーブとの通信は、1対1で行っても良い。
Claims (8)
- 通信バスを介して接続されるマスタとの間で非同期式通信を行う通信用スレーブ(21)であって、
システム上の重要度が最高に設定されていると共に、実行間隔が一定となる最重要タスクを含む、複数のタスクを時分割並行的に実施可能であるCPU(2A)と、
このCPUが前記最重要タスクを実行している期間に、タスク実行信号を出力する信号出力部(7)と、
前記最重要タスクのプログラムが格納されているメモリ領域(3)の開始アドレス,終了アドレスの設定値と、前記CPUが実行中のアドレスとを比較することで、前記最重要タスクのプログラム領域であるか否かを判定するプログラム領域判定部(13)と、
前記最重要タスクのデータが格納されているメモリ領域の開始アドレス,終了アドレス
の設定値と、前記CPUが実行中のアドレスとを比較することで、前記最重要タスクのデータ領域であるか否かを判定するデータ領域判定部(45)と、
前記プログラム領域判定部による判定結果と前記タスク実行信号の出力状態とを参照して、双方が不一致である場合に暴走を検知し、また、前記データ領域判定部による判定結果と前記タスク実行信号の出力状態とを参照して、双方が不一致である場合に暴走を検知する暴走検知部(42)と、
前記CPUにクロック信号を供給する発振回路(24)と、
前記マスタが周期的に送信する同期信号の受信間隔を、前記クロック信号に基づくカウント動作により計測する計測カウンタ(33)と、
前記同期信号を受信したタイミングで、前記計測カウンタの計測値が格納されるモニタ用レジスタ(50)とを備え、
前記複数のタスクの何れか1つ(発振異常監視タスクと称す)は、前記モニタ用レジスタに格納された計測値を読み出して、当該計測値が正常範囲を超えると、前記発振回路の異常を検知することを特徴とする通信用スレーブ。 - 前記同期信号を受信してから前記マスタとの通信を開始するまでの待機時間を計時するための待機時間カウンタを備え、
前記計測カウンタに、前記待機時間カウンタを使用することを特徴とする請求項1記載の通信用スレーブ。 - 前記同期信号を受信すると検出フラグがセットされるフラグセット部(39,51,52)を備え、
前記発振異常監視タスクは、前記検出フラグがセットされると、前記モニタ用レジスタに格納された計測値を読み出すことを特徴とする請求項1又は2記載の通信用スレーブ。 - 前記同期信号の受信伝達経路を遮断することで、前記発振異常監視タスクによる前記発振回路の異常検知処理を禁止する禁止手段(36,37)を備えたことを特徴とする請求項1から3の何れか一項に記載の通信用スレーブ。
- 前記発振異常監視タスクは、前記計測値が前記正常範囲を超えると異常検知カウンタをインクリメントし、
前記計測値が前記正常範囲内であれば、前記異常検知カウンタをクリアして、
前記異常検知カウンタのカウンタ値が所定値に達すると、前記発振回路の異常を検知することを特徴とする請求項1から4の何れか一項に記載の通信用スレーブ。 - 前記発振異常監視タスクは、前記計測値が前記正常範囲を超えると異常検知カウンタをインクリメントし、
前記計測値が前記正常範囲内であれば、前記異常検知カウンタをデクリメントして、
前記異常検知カウンタのカウンタ値が所定値に達すると、前記発振回路の異常を検知することを特徴とする請求項1から4の何れか一項に記載の通信用スレーブ。 - 前記発振異常監視タスクは、前記マスタにより送信される周期設定コマンドを受信すると、前記コマンドに含まれている同期信号の出力周期データに基づいて前記正常範囲を設定することを特徴とする請求項1から6の何れか一項に記載の通信用スレーブ。
- 前記発振異常監視タスクは、前記モニタ用レジスタに格納された計測値を最初に読み出した値に基づいて、前記正常範囲を設定することを特徴とする請求項1から6の何れか一項に記載の通信用スレーブ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013029034A JP5987723B2 (ja) | 2013-02-18 | 2013-02-18 | 通信用スレーブ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013029034A JP5987723B2 (ja) | 2013-02-18 | 2013-02-18 | 通信用スレーブ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014157554A JP2014157554A (ja) | 2014-08-28 |
| JP5987723B2 true JP5987723B2 (ja) | 2016-09-07 |
Family
ID=51578373
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013029034A Active JP5987723B2 (ja) | 2013-02-18 | 2013-02-18 | 通信用スレーブ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5987723B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102017217723A1 (de) * | 2017-10-05 | 2019-04-11 | Robert Bosch Gmbh | Vorrichtung und Verfahren zur Korrektur von mindestens einem Übertragungsparameter |
| JP2020086934A (ja) * | 2018-11-26 | 2020-06-04 | 株式会社村田製作所 | カウンタ読み出し回路 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10247121A (ja) * | 1997-03-05 | 1998-09-14 | Sanyo Electric Co Ltd | マイクロコンピュータ |
| JP3991782B2 (ja) * | 2002-06-24 | 2007-10-17 | 株式会社デンソー | 電子制御装置 |
| JP4893427B2 (ja) * | 2006-06-30 | 2012-03-07 | 株式会社デンソー | マイクロコンピュータシステム |
| JP2009017130A (ja) * | 2007-07-03 | 2009-01-22 | Sanyo Electric Co Ltd | 複数の発振回路を備える電子回路 |
| JP5509055B2 (ja) * | 2009-12-24 | 2014-06-04 | キヤノンファインテック株式会社 | 画像形成装置 |
-
2013
- 2013-02-18 JP JP2013029034A patent/JP5987723B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014157554A (ja) | 2014-08-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101283431B1 (ko) | 마이크로 컴퓨터 | |
| WO2016062084A1 (zh) | 掉电处理方法、装置及电子设备 | |
| JP6054010B2 (ja) | データ判定装置、データ判定方法及びプログラム | |
| US9841795B2 (en) | Method for resetting an electronic device having independent device domains | |
| US20180089046A1 (en) | Self-diagnosis device and self-diagnosis method | |
| TW201933096A (zh) | 半導體裝置及其故障檢測方法 | |
| JP5545250B2 (ja) | 制御装置 | |
| JP5987723B2 (ja) | 通信用スレーブ | |
| EP3312726A1 (en) | Cpu monitoring device | |
| JP6187508B2 (ja) | 制御装置、バス回路、方法、及び、プログラム | |
| JP2011154459A (ja) | コンピュータシステムのプログラム異常動作検出装置 | |
| JP2010009258A (ja) | ソフトウエアの異常検出装置 | |
| US20170168757A1 (en) | Semiconductor device and memory access control method | |
| JP4322606B2 (ja) | ウォッチドッグタイマ | |
| JP2012198806A (ja) | 制御装置 | |
| US8527743B2 (en) | Simultaneous checking of plural exit conditions loaded in table subsequent to execution of wait instruction for jitter free exit | |
| JP6741940B2 (ja) | 情報処理装置及びpld管理プログラム | |
| JP4842036B2 (ja) | 半導体装置と、タイミング制御回路の異常検出方法 | |
| US10719117B2 (en) | Control apparatus configured to control clock signal generation, method for controlling the same, storage medium, and computer system | |
| JPH0581138A (ja) | マイクロプログラム制御装置 | |
| JP3977694B2 (ja) | リセット装置 | |
| JP2014002649A (ja) | 半導体装置及びアクセスタイミング調整方法 | |
| JP6161105B2 (ja) | 情報処理システム | |
| JP4063699B2 (ja) | プログラム暴走検出回路 | |
| JP2001256059A (ja) | 割込み入力ユニット及びplcシステム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150417 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20151228 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160112 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160223 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160712 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160725 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5987723 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |