JP5961455B2 - 両軸受リールのレベルワインド機構、両軸受リールおよび電動リール - Google Patents
両軸受リールのレベルワインド機構、両軸受リールおよび電動リール Download PDFInfo
- Publication number
- JP5961455B2 JP5961455B2 JP2012136794A JP2012136794A JP5961455B2 JP 5961455 B2 JP5961455 B2 JP 5961455B2 JP 2012136794 A JP2012136794 A JP 2012136794A JP 2012136794 A JP2012136794 A JP 2012136794A JP 5961455 B2 JP5961455 B2 JP 5961455B2
- Authority
- JP
- Japan
- Prior art keywords
- fishing line
- spool
- clutch
- line guide
- reel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000007246 mechanism Effects 0.000 title claims description 183
- 238000004804 winding Methods 0.000 title claims description 49
- 230000005540 biological transmission Effects 0.000 claims description 26
- 238000001514 detection method Methods 0.000 claims description 22
- 230000008878 coupling Effects 0.000 claims description 8
- 238000010168 coupling process Methods 0.000 claims description 8
- 238000005859 coupling reaction Methods 0.000 claims description 8
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 26
- 238000000034 method Methods 0.000 description 25
- 230000008569 process Effects 0.000 description 23
- 230000009467 reduction Effects 0.000 description 12
- 230000009977 dual effect Effects 0.000 description 11
- 238000003860 storage Methods 0.000 description 10
- 230000005855 radiation Effects 0.000 description 9
- 238000005452 bending Methods 0.000 description 6
- 230000006870 function Effects 0.000 description 5
- 230000017525 heat dissipation Effects 0.000 description 5
- 230000002093 peripheral effect Effects 0.000 description 5
- 229910052751 metal Inorganic materials 0.000 description 4
- 239000002184 metal Substances 0.000 description 4
- 235000014676 Phragmites communis Nutrition 0.000 description 3
- 238000005520 cutting process Methods 0.000 description 3
- 239000004973 liquid crystal related substance Substances 0.000 description 3
- 241000251468 Actinopterygii Species 0.000 description 2
- 229910000838 Al alloy Inorganic materials 0.000 description 2
- 238000005266 casting Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000009429 electrical wiring Methods 0.000 description 2
- 239000000565 sealant Substances 0.000 description 2
- 239000000758 substrate Substances 0.000 description 2
- 229920003002 synthetic resin Polymers 0.000 description 2
- 239000000057 synthetic resin Substances 0.000 description 2
- 239000000919 ceramic Substances 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 210000000078 claw Anatomy 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
Images












Classifications
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01K—ANIMAL HUSBANDRY; AVICULTURE; APICULTURE; PISCICULTURE; FISHING; REARING OR BREEDING ANIMALS, NOT OTHERWISE PROVIDED FOR; NEW BREEDS OF ANIMALS
- A01K89/00—Reels
- A01K89/015—Reels with a rotary drum, i.e. with a rotating spool
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01K—ANIMAL HUSBANDRY; AVICULTURE; APICULTURE; PISCICULTURE; FISHING; REARING OR BREEDING ANIMALS, NOT OTHERWISE PROVIDED FOR; NEW BREEDS OF ANIMALS
- A01K89/00—Reels
- A01K89/015—Reels with a rotary drum, i.e. with a rotating spool
- A01K89/017—Reels with a rotary drum, i.e. with a rotating spool motor-driven
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01K—ANIMAL HUSBANDRY; AVICULTURE; APICULTURE; PISCICULTURE; FISHING; REARING OR BREEDING ANIMALS, NOT OTHERWISE PROVIDED FOR; NEW BREEDS OF ANIMALS
- A01K89/00—Reels
- A01K89/01—Reels with pick-up, i.e. with the guiding member rotating and the spool not rotating during normal retrieval of the line
- A01K89/0108—Pick-up details
- A01K89/01081—Guiding members on rotor axially rearward of spool
- A01K89/01082—Guiding members shiftable on rotor
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Environmental Sciences (AREA)
- Animal Husbandry (AREA)
- Biodiversity & Conservation Biology (AREA)
Description
図1、図2、図3、図4、図5及び図6において、本発明の一実施形態に係る両軸受リールである電動リール100は、外部電源から供給された電力により駆動されるとともに、手巻きリールとして使用するときの電源を内部に有するリールである。また、電動リールは、糸繰り出し長さ又は糸巻取長さに応じて仕掛けの水深を表示する水深表示機能を有するリールである。なお、以降の説明では、釣り糸が繰り出される前後方向を第1方向Xといい、それと直交する左右方向を第2方向Yという。
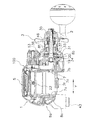
リール本体1は、図7及び図8に示すように、フレーム7と、第1側カバー8aと、第2側カバー8bと、前カバー9と、カウンタケース4と、を備える。フレーム7は、一体形成された第1側板7aと、第1側板7aと第2方向Yに間隔を隔てて配置された第2側板7bと、第1側板7aと第2側板7bとを連結する第1連結部材7c及び第2連結部材7dと、を有している。第1側カバー8aは、フレーム7のハンドル2の装着側と逆側を覆う。第2側カバー8bは、フレーム7のハンドル2装着側を覆う。前カバー9は、フレーム7の前部を覆う。
カウンタケース4は、図1、図8及び図9に示すように、第1側板7a及び第2側板7bの上部に載置され、第1側板7a及び第2側板7bの外側面にネジ止め固定されている。カウンタケース4の内部には、水深表示用の液晶ディスプレイからなる表示器61が収納されている。また、カウンタケース4の内部には、モータ12及び表示器61を制御する、例えばマイクロコンピュータからなるリール制御部60(図13)が設けられている。
スプール10は、図7に示すように、スプール軸14に一体回転可能に装着されている。スプール10は、筒状の糸巻胴部10bと、糸巻胴部10bの両側に一体形成された大径の第1フランジ部10c及び第2フランジ部10dと、を有している。スプール10は、糸巻胴部10bの直径が第1フランジ部10c及び第2フランジ部10dの直径よりかなり小さい(例えば半分以下の直径)直径を有する深溝型のものである。第1フランジ部10cに前述した磁石10aが固定される。スプール軸14は、糸巻胴部10bの内周部に圧入等の適宜の固定手段により固定されている。
クラッチ機構16は、クラッチピン16aと、後述するピニオンギア32の図7右側端面に径方向に沿って十字に凹んで形成されたクラッチ凹部16bと、を有している。ピニオンギア32は、クラッチ機構16を構成するとともに後述する第1回転伝達機構45を構成している。ピニオンギア32は、スプール軸14方向に沿って、図7に示すクラッチオン位置とクラッチオン位置より図3左側のクラッチオフ位置との間で移動する。クラッチオン位置では、クラッチピン16aがクラッチ凹部16bに係合してピニオンギア32の回転がスプール軸14に伝達され、クラッチ機構16は、クラッチオン状態になる。このクラッチオン状態では、ピニオンギア32とスプール軸14とが一体回転可能になる。また、クラッチオフ位置では、クラッチ凹部16bがクラッチピン16aから離反してピニオンギア32の回転がスプール軸14に伝達されない。このため、クラッチ機構16は、クラッチオフ状態になり、スプール10は自由回転可能になる。
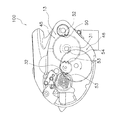
レベルワインド機構22は、図9に示すように、リール本体1に対して回転し釣り糸を前方に繰り出すスプール10の糸巻取方向の回転に連動して釣り糸を第2方向Yに往復移動させる機構である。レベルワインド機構22は、釣り糸ガイド23と、トラバースカム軸24と、ガイドセンサ65と、を備えている。トラバースカム軸24は、外周面に交差する螺旋状溝24aを有し、釣り糸ガイド23を第2方向Yに往復移動させる。ガイドセンサ65は、釣り糸ガイド23が所定位置にあることを検出する。トラバースカム軸24は往復移動機構の一例である。ガイドセンサ65は、釣り糸ガイド検出部の一例である。
スプール駆動機構13は、スプール10を糸巻取方向に駆動する。また、巻取時にスプール10にドラグ力を発生させて釣り糸の切断を防止する。スプール駆動機構13は、図6、図7及び図8に示すように、モータ12と、モータ12の糸繰り出し方向の回転を禁止する逆転禁止部44と、第1回転伝達機構45と、第2回転伝達機構46と、を備えている。第1回転伝達機構45は、モータ12の回転を減速してスプール10に伝達する。第2回転伝達機構46は、ハンドル2の回転を、第1回転伝達機構45を介して増速してスプール10に伝達する。なお、図6において、矢印は糸巻取方向の各ギアの回転方向を示している。
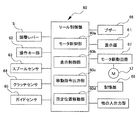
図13に示すように、リール制御部60は、例えば、CPU、RAM、ROM、I/Oインターフェイス等を含むマイクロコンピュータや液晶駆動回路から構成される。リール制御部60は、ソフトウェアで実現される機能構成として、モータ制御部60aと、表示制御部60bと、移動指令出力部60cと、所定位置移動部60dと、を備えている。モータ制御部60aは、調整レバー5の操作量に応じてモータ12を操作量に応じた速度一定または操作量に応じた張力一定に制御する。表示制御部60bは、液晶駆動回路を制御して、釣り糸の糸長(仕掛けの水深)の算出及び表示等の表示器61の表示処理を行う。移動指令出力部60cは、スプール10の糸繰り出し方向の回転に関連してレベルワインド機構22の釣り糸ガイド23を所定位置に移動させる移動指令を出力する。この実施形態では、移動指令出力部60cは、クラッチセンサ64がクラッチオフ状態を検出すると、移動指令を出力する。所定位置移動部60dは、移動指令出力部60cが移動指令を出力すると、モータ12によりトラバースカム軸24を回転させて釣り糸ガイド23を所定位置に移動させる。
リール制御部60の制御動作について、図14及び図15に示すフローチャートに基づいて説明する。なお、図14か及び図15に示すフローチャートは、制御手順の一例であり、本発明の制御手順はこれに限定されない
電動リール100に電源コードを介して外部電源に接続されると、図14のステップS1において初期設定を行う。この初期設定ではスプールセンサ63の計数値をリセットしたり、各種の変数やフラグをリセットしたり、モータ制御モードを速度モードにし、表示モードを上からモードにする。上からモードは、水面からの仕掛けの水深を表示するモードである。
上記実施形態は、下記のように表現可能である。
以上、本発明の一実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、発明の要旨を逸脱しない範囲で種々の変更が可能である。
2 ハンドル
10 スプール
11 クラッチ操作部材
12 モータ
22 レベルワインド機構
23 釣り糸ガイド
24 トラバースカム軸(往復移動機構の一例)
28 磁石
45 第1回転伝達機構
60 リール制御部
60c 移動指令出力部
60d 所定位置移動部
64 クラッチセンサ
65 ガイドセンサ(釣り糸ガイド検出部の一例)
100 電動リール
Claims (6)
- リール本体に対して回転するスプールがモータにより駆動される電動リールに設けられ、前記スプールの糸巻取方向の回転に連動して釣り糸を左右方向に往復移動させるレベルワインド機構であって、
前記スプールの前方に配置され、釣り糸を案内する釣り糸ガイドと、
前記釣り糸ガイドを前記左右方向に往復移動させる往復移動機構と、
前記釣り糸ガイドが所定位置にあることを検出する釣り糸ガイド検出部と、
前記スプールの糸繰り出し方向の回転に関連して前記釣り糸ガイドを前記所定位置に移動させる移動指令を出力する移動指令出力部と、
前記移動指令出力部が前記移動指令を出力すると、前記往復移動機構を動作させて前記釣り糸ガイドを前記所定位置に移動させる所定位置移動部と、
を備え、
前記電動リールは、
前記スプールを回転操作するためのハンドルと前記スプールとを連結する連結状態及び連結解除する連結解除状態とを取り得るクラッチ機構と、
前記クラッチ機構を前記連結状態にする連結位置と前記連結解除状態にする連結解除位置とに移動可能に前記リール本体に設けられるクラッチ操作部材と、
前記クラッチ機構が前記連結解除状態であるか否かを検出可能なクラッチ状態検出部と、
前記モータの回転を、前記ハンドルの駆動軸を経由せずに前記クラッチ機構を経由して前記スプールに伝達するとともに、前記クラッチ機構よりも前記モータ側で前記往復移動機構に伝達する回転伝達経路と、
を有し、
前記移動指令出力部は、前記クラッチ状態検出部が前記連結解除状態であることを検出すると、前記移動指令を出力し、
前記所定位置移動部は、前記移動指令が出力されると、前記モータの回転により前記回転伝達経路を介して前記往復移動機構を動作させて、前記釣り糸ガイドを前記所定位置に移動させる、
電動リールのレベルワインド機構。 - 前記所定位置は、前記スプールの左右方向の実質的に中心の位置に対応する位置である、請求項1に記載の電動リールのレベルワインド機構。
- 前記クラッチ状態検出部は、前記クラッチ操作部材が前記連結解除位置にあるか否かにより前記クラッチ機構が連結解除状態にあるか否かを検出する、請求項1又は2に記載の電動リールのレベルワインド機構。
- 前記釣り糸ガイド検出部は、前記釣り糸ガイド及び前記リール本体のいずれか一方に設けられるセンサを有し、
前記釣り糸ガイド及び前記リール本体のいずれか他方には、前記センサにより検出される検出子が設けられる、請求項1から3のいずれか1項に記載の電動リールのレベルワインド機構。 - 前記検出子は、前記釣り糸ガイドに設けられた磁石であり、
前記センサは、前記リール本体に前記所定位置に対応して設けられ、前記磁石を検出可能な磁力検出部である、請求項4に記載の電動リールのレベルワインド機構。 - 前記モータと、請求項1から5のいずれか1項に記載のレベルワインド機構と、を備える電動リール。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012136794A JP5961455B2 (ja) | 2012-06-18 | 2012-06-18 | 両軸受リールのレベルワインド機構、両軸受リールおよび電動リール |
| TW102104565A TWI558316B (zh) | 2012-06-18 | 2013-02-06 | 電動捲線器的均勻捲線機構、及電動捲線器 |
| KR1020130027273A KR101928390B1 (ko) | 2012-06-18 | 2013-03-14 | 전동 릴의 레벨 와인드 기구 및 전동 릴 |
| CN201310105588.2A CN103503850B (zh) | 2012-06-18 | 2013-03-28 | 双轴承渔线轮均匀绕线机构、双轴承渔线轮和电动渔线轮 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012136794A JP5961455B2 (ja) | 2012-06-18 | 2012-06-18 | 両軸受リールのレベルワインド機構、両軸受リールおよび電動リール |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014000030A JP2014000030A (ja) | 2014-01-09 |
| JP2014000030A5 JP2014000030A5 (ja) | 2015-04-30 |
| JP5961455B2 true JP5961455B2 (ja) | 2016-08-02 |
Family
ID=49887709
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012136794A Active JP5961455B2 (ja) | 2012-06-18 | 2012-06-18 | 両軸受リールのレベルワインド機構、両軸受リールおよび電動リール |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP5961455B2 (ja) |
| KR (1) | KR101928390B1 (ja) |
| CN (1) | CN103503850B (ja) |
| TW (1) | TWI558316B (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6396697B2 (ja) * | 2014-06-27 | 2018-09-26 | グローブライド株式会社 | 魚釣用電動リール |
| JP6587950B2 (ja) * | 2016-02-02 | 2019-10-09 | Kddi株式会社 | スカラ特徴量によって時系列変化点を検出可能なプログラム、装置及び方法 |
| JP2017176111A (ja) * | 2016-03-31 | 2017-10-05 | グローブライド株式会社 | 魚釣用リール |
| JP6554059B2 (ja) * | 2016-03-31 | 2019-07-31 | グローブライド株式会社 | 魚釣用電動リール |
| CN106386725B (zh) * | 2016-09-14 | 2022-03-25 | 徐帮奇 | 推进式渔具绕线装置 |
| JP7307693B2 (ja) * | 2020-03-24 | 2023-07-12 | グローブライド株式会社 | 魚釣用リール |
| KR20220027735A (ko) * | 2020-08-27 | 2022-03-08 | 글로브라이드 가부시키가이샤 | 낚시 정보 관리 시스템 및 처리 방법 |
| JP7513571B2 (ja) | 2021-06-03 | 2024-07-09 | グローブライド株式会社 | 魚釣用電動リール |
| CN114589149B (zh) * | 2022-03-15 | 2024-01-12 | 万志良 | 一种汽车刹车片生产用铁掌快速除油装置 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS56169534A (en) * | 1980-05-30 | 1981-12-26 | Daiwa Seiko Co | Both bearing type reel for fishing |
| KR100304065B1 (ko) * | 1993-10-21 | 2001-11-22 | 마쯔이 요시유끼 | 낚시용스피닝릴의드래그장치 |
| JP2001231417A (ja) * | 2000-02-25 | 2001-08-28 | Daiwa Seiko Inc | 魚釣用電動リール |
| JP2002247942A (ja) * | 2001-02-23 | 2002-09-03 | Johshuya Co Ltd | 魚釣用電動リール |
| JP2003235415A (ja) * | 2002-02-20 | 2003-08-26 | Shimano Inc | 両軸受リールのレベルワインド機構 |
| JP2007089597A (ja) * | 2002-03-05 | 2007-04-12 | Daiwa Seiko Inc | 魚釣用リール |
| JP2003304783A (ja) * | 2002-04-18 | 2003-10-28 | Daiwa Seiko Inc | 魚釣用両軸リール |
| CN2872844Y (zh) * | 2005-12-30 | 2007-02-28 | 郑岳华 | 封闭式内线连体轮 |
-
2012
- 2012-06-18 JP JP2012136794A patent/JP5961455B2/ja active Active
-
2013
- 2013-02-06 TW TW102104565A patent/TWI558316B/zh active
- 2013-03-14 KR KR1020130027273A patent/KR101928390B1/ko active IP Right Grant
- 2013-03-28 CN CN201310105588.2A patent/CN103503850B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN103503850A (zh) | 2014-01-15 |
| KR101928390B1 (ko) | 2018-12-12 |
| JP2014000030A (ja) | 2014-01-09 |
| CN103503850B (zh) | 2017-04-05 |
| TW201400011A (zh) | 2014-01-01 |
| TWI558316B (zh) | 2016-11-21 |
| KR20130142061A (ko) | 2013-12-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5961455B2 (ja) | 両軸受リールのレベルワインド機構、両軸受リールおよび電動リール | |
| JP2014000030A5 (ja) | ||
| JP4863891B2 (ja) | 両軸受リール | |
| TWI601479B (zh) | Electric reel control device | |
| JP5764014B2 (ja) | 両軸受リールの張力表示装置 | |
| JP2008178315A (ja) | 両軸受リールのハンドル軸支持構造 | |
| JP6204041B2 (ja) | 両軸受リール | |
| JP2008178315A5 (ja) | ||
| JP5707074B2 (ja) | 電動リール | |
| JP2013048594A5 (ja) | ||
| JP2014183763A5 (ja) | ||
| JP6046385B2 (ja) | 電動リールのレベルワインド機構 | |
| JP2014000029A5 (ja) | ||
| JP5777867B2 (ja) | 釣り用リール | |
| JP2019092429A5 (ja) | ||
| JP2019092429A (ja) | 両軸受リール | |
| JP6284307B2 (ja) | 電動リールのモータ制御装置 | |
| JP5748438B2 (ja) | 電動リール | |
| JP2015002689A5 (ja) | ||
| JP4366146B2 (ja) | 電動リール | |
| JP2018110570A (ja) | 魚釣用リール | |
| JP2005117902A (ja) | 電動リール | |
| JP4368814B2 (ja) | 魚釣用電動リール | |
| KR20240081348A (ko) | 낚시용 릴 및 전지 박스 | |
| KR20240081347A (ko) | 낚시용 릴 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150313 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150313 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160114 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160119 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160309 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160607 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160627 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5961455 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |