JP5949110B2 - 光走査装置及び画像形成装置 - Google Patents
光走査装置及び画像形成装置 Download PDFInfo
- Publication number
- JP5949110B2 JP5949110B2 JP2012104685A JP2012104685A JP5949110B2 JP 5949110 B2 JP5949110 B2 JP 5949110B2 JP 2012104685 A JP2012104685 A JP 2012104685A JP 2012104685 A JP2012104685 A JP 2012104685A JP 5949110 B2 JP5949110 B2 JP 5949110B2
- Authority
- JP
- Japan
- Prior art keywords
- circuit board
- rotating body
- straight line
- virtual straight
- adjustment
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





















Description
<画像形成装置の全体構成>
まず、本発明の実施形態に係る画像形成装置の全体構成について説明する。
つぎに画像形成工程について説明する。
つぎに光走査装置100について説明する。
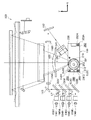
偏向器200及び偏向器200の筐体102の底面102Aへの取付構造について説明する。
つぎに、偏向器200を筐体102の底面102Aに取り付けて固定する方法と回転体210の回転軸212の角度調整について説明する。
つぎに、本実施形態の作用及び効果について説明する。
図14に示すように、第一固定孔262から第二固定孔264に引いた仮想直線S1が回転体210上を通っている。よって、回路基板250の湾曲中心(回転中心)となる仮想直線S1と回転体210の回転軸212とが近くなる。したがって、角度調整するセルフタップネジ350Cの締込量に対する回転体210の回転軸212の角度変化量を緩やかにすることができる。よって、回転体210の回転軸212の角度調整を高精度に行うことができる。
図14に示すように、回路基板250の調整孔268が仮想直線S1に対する回転多面鏡204への光ビームLの入射側と反対側に配置されている。よって、角度調整するセルフタップネジ350Cを締め込んで角度調整を行う際に、光ビームLが調整用の工具類に干渉しにくい(工具類が光ビームLを遮らにくい)。したがって、光ビームLを利用して回転体210の回転軸212の角度調整を行う際の作業効率が向上し、この結果、回転軸212の角度調整を高精度に行うことができる。
図14に示すように、第一固定孔262と第二固定孔264と調整孔268とで囲まれる三角形Rの内側に回転体210の回転軸212が配置されている。回路基板250における三角形Rの領域は各頂点部分が固定されているので、片持構造となる三角形Rの外側の領域よりも剛性が高い。したがって、回転体210の回転軸212が三角形Rの外側に配置された場合と比較して、回転体210の回転に伴う回路基板250の振動が低減する。
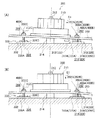
図10(A)に示すように、予め仮想直線S1側に回転体210の回転軸212が傾くように回路基板250が支持される(初期傾斜状態)。そして、この状態から図10(B)に示すように、セルフタップネジ350Cを締め込んで回路基板250を撓ませ、回転軸212を仮想直線S1と反対側に傾斜して角度調整する。このように、セルフタッネジ350Cによる角度調整方向が一方向となるので、回転体210の回転軸212の角度調整を高精度に行うことができる。
(作用効果5)
回路基板250における回転体210側が配置された側(第二固定孔264と調整孔268との間)の端部261には、内縁が略U字形状の切欠部260が形成されている(図5、図7、図8等も参照)。よって、回転軸212を角度調整するために回路基板250を湾曲させても、切欠部260近傍に応力が集中し、回路基板250の切欠部260近傍以外の部位の応力が低減する。また、本実施形態では、回路基板250を構成するベース部材248に切欠部248が形成されている。よって、電子部品や配線パターンが設けられた紙フェノール基板246の変形が効果的に低減する。したがって、電子部品や配線パターンへの応力が効果的に低減する。
図23は、角度調整後の回路基板250のベース部材248の応力分布を示している。なお、ドット(点)が密になるほど、応力が大きいことを示している。そして、この図17を見ると判るように、回路基板250(のベース部材248)における端部261の切欠部260付近に応力が集中している。また、回路基板250(のベース部材248)における調整孔268側の反対側は、調整孔268側よりも応力が小さくなっている。
図6及び図9(A)に示すように、第一支持部310及び第二支持部320において、仮想直線S1(図14参照)に対して調整孔268と反対側に配置されたボス316C,326Cの突出高(t2)を他のボス316A,316B,326A,326Bの突出高(t1)よりも低くなるように構成することで、仮想直線S1側に回転体210の回転軸212が傾いた状態で、回路基板250が支持される。よって、筐体102を成型する成形型における第一支持部310及び第二支持部320又はボス316C,326Cを入れ子構造とすることで、ボス316C,326Cの突出高を筺体全体の成形型を変更することなく変更できる。つまり、予め仮想直線S側に傾ける回転軸212の角度を、筺体102全体の成形型を変更することなく調整することができる。また、これにより、仕様の異なる偏向器を導入する場合など、偏向器の回転軸の軸倒れ傾向や仕様が大きく変わっても、筺体全体の成形型を変更することなく対応することができる。
図9(B)及び図10に示すように、調整用支持部330においては、ボス336A,336B,336Cの突出高(t3)はボス316C,326Cの突出高(t2)よりも低くなるように構成されている。よって、セルフタップネジ350Cによる回転軸212の角度調整量を大きく確保することができる。また、Y方向及びX方向を水平方向とした場合、回路基板250における調整用孔268部分が、水平よりも底面102A側に移動可能であるので、回転軸212の角度調整量を大きく確保することができる。
図9(A)に示すように、ボス316A,316B,316C,326A,326B,326C、336A,336B,336Cは、セルフタップネジ350A,350B,350Cの頭部352A,352B,352C(図8等を参照)の座面353A,353B,353Cの外側に位置するように形成されている。よって、ボス316A,316B,316C,326A,326B,326C、336A,336B,336Cに対して、座面353A,353B,353Cが片当たりすることによる回転軸212の傾きを抑制することができる。
更に、上記のように回転体210の回転軸212を高精度に調整することができることによって、次の作用効果が得られる。
つぎに本実施形態の変形例について説明する。
尚、本発明は、上記実施形態に限定されない。
34Y 感光体(潜像保持体の一例)
34M 感光体(潜像保持体の一例)
34C 感光体(潜像保持体の一例)
34K 感光体(潜像保持体の一例)
36Y 帯電部材(帯電手段の一例)
36M 帯電部材(帯電手段の一例)
36C 帯電部材(帯電手段の一例)
36K 帯電部材(帯電手段の一例)
38Y 現像器(現像手段の一例)
38M 現像器(現像手段の一例)
38C 現像器(現像手段の一例)
38K 現像器(現像手段の一例)
100 光走査装置
102 筐体(収容部の一例)
102A 底面(内面の一例)
104Y 光源
104M 光源
104C 光源
104K 光源
200 偏向器
204 回転多面鏡
210 回転体
212 回転軸
250 回路基板
268 調整孔(調整部の一例)
310 第一支持部(一対の支持部の一例)
316A ボス(他の凸部の一例)
316B ボス(他の凸部の一例)
316C ボス(一の凸部の一例)
320 第二支持部(一対の支持部の一例)
326A ボス(他の凸部の一例)
326B ボス(他の凸部の一例)
326C ボス(一の凸部の一例)
330 調整用支持部
336A ボス(調整用凸部の一例)
336B ボス(調整用凸部の一例)
336C ボス(調整用凸部の一例)
350A セルフタップネジ(一対の固定部材の一例)
350B セルフタップネジ(一対の固定部材の一例)
350C セルフタップネジ(ネジ部材の一例)
353A 座面
353B 座面
353C 座面
400A ゴム部材(弾性部材の一例)
400B ゴム部材(弾性部材の一例)
LY 光ビーム
LM 光ビーム
LC 光ビーム
LK 光ビーム
S1 仮想直線
Claims (6)
- 光源から出射される光ビームを偏向する回転多面鏡が設けられた回転体と、
前記回転体を回転可能に支持すると共に前記回転体を駆動する回路基板と、
前記回転体及び前記回路基板を収容する収容部と、
前記収容部の内面に互いに離間して設けられると共に、互いを結ぶ仮想直線が前記回転体の回転軸から離れ且つ前記回転体と重なるように配置され、前記回転軸が前記仮想直線側に傾くように前記回路基板を支持する一対の支持部と、
前記回路基板を前記一対の支持部に固定する一対の固定部材と、
前記回路基板における前記仮想直線に対して前記回転軸が配置された側に位置する調整位置において、前記収容部に対する前記回路基板の前記回転軸の軸方向における位置を調整する調整部と、
を備えた光走査装置。 - 光源から出射される光ビームを偏向する回転多面鏡が設けられた回転体と、
前記回転体を回転可能に支持すると共に前記回転体を駆動する回路基板と、
前記回転体及び前記回路基板を収容する収容部と、
前記収容部の内面に互いに離間して設けられると共に、互いを結ぶ仮想直線が前記回転体の回転軸から離れるように配置され、前記回転軸が前記仮想直線側に傾くように前記回路基板を支持する一対の支持部と、
前記回路基板を前記一対の支持部に固定する一対の固定部材と、
前記回路基板における前記仮想直線に対して前記回転軸が配置された側に位置する調整位置において、前記収容部に対する前記回路基板の前記回転軸の軸方向における位置を調整する調整部と、
を備え、
前記一対の支持部は、それぞれ前記収容部の内面から突出された複数の凸部のうち少なくとも一つの凸部の突出高を他の凸部の突出高よりも低くすることで、前記仮想直線側に前記回転体の前記回転軸が傾くように前記回路基板を支持する構成とされている光走査装置。 - 前記収容部の内面から前記回路基板の前記調整位置に向けて、前記一対の支持部における前記他の凸部の突出高よりも低く突出された調整用凸部を有する調整用支持部を備えた請求項2記載の光走査装置。
- 前記固定部材は、ネジとされ、
前記ネジの軸方向から見て、複数の前記凸部は前記ネジの座面の外側に配置されている請求項2又は請求項3に記載の光走査装置。 - 前記固定部材は、ネジとされ、
前記回路基板と前記ネジの座面との間に、弾性部材が挟まれている請求項1〜請求項4のいずれか1項に記載の光走査装置。 - 帯電手段で帯電された潜像保持体の表面に光ビームを走査して潜像を形成する請求項1〜請求項5のいずれか1項に記載の光走査装置と、
前記潜像保持体に形成された前記潜像に現像剤を付与して現像する現像手段と、
を備える画像形成装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012104685A JP5949110B2 (ja) | 2012-05-01 | 2012-05-01 | 光走査装置及び画像形成装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012104685A JP5949110B2 (ja) | 2012-05-01 | 2012-05-01 | 光走査装置及び画像形成装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013231905A JP2013231905A (ja) | 2013-11-14 |
| JP2013231905A5 JP2013231905A5 (ja) | 2015-05-07 |
| JP5949110B2 true JP5949110B2 (ja) | 2016-07-06 |
Family
ID=49678377
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012104685A Active JP5949110B2 (ja) | 2012-05-01 | 2012-05-01 | 光走査装置及び画像形成装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5949110B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016126268A (ja) * | 2015-01-08 | 2016-07-11 | キヤノン株式会社 | 光走査装置及び画像形成装置 |
| JP6789666B2 (ja) * | 2016-05-10 | 2020-11-25 | キヤノン株式会社 | 走査光学装置、及び画像形成装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007183327A (ja) * | 2006-01-05 | 2007-07-19 | Canon Inc | 走査光学装置及び画像形成装置 |
| JP2010025956A (ja) * | 2008-07-15 | 2010-02-04 | Kyocera Mita Corp | 走査光学装置及びこれを備えた画像形成装置 |
| JP4894851B2 (ja) * | 2008-12-22 | 2012-03-14 | 富士ゼロックス株式会社 | 光学走査装置及びこれを用いた画像形成装置 |
| JP2010243747A (ja) * | 2009-04-06 | 2010-10-28 | Canon Inc | 走査光学装置及びその製造方法 |
| JP5539152B2 (ja) * | 2009-11-30 | 2014-07-02 | キヤノン株式会社 | 光走査装置 |
-
2012
- 2012-05-01 JP JP2012104685A patent/JP5949110B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013231905A (ja) | 2013-11-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5949108B2 (ja) | 光走査装置及び画像形成装置 | |
| US9581929B2 (en) | Optical scanning apparatus, image forming apparatus, and support member for an optical scanning apparatus | |
| JP5949110B2 (ja) | 光走査装置及び画像形成装置 | |
| JP5949109B2 (ja) | 光走査装置及び画像形成装置 | |
| US7821678B2 (en) | Image forming apparatus capable of producing a high-precision light beam with a simple structure | |
| JP2006079052A (ja) | 光走査装置及び画像形成装置 | |
| JP5153586B2 (ja) | 光学走査装置 | |
| US7477279B2 (en) | Image forming apparatus | |
| JP2007183327A (ja) | 走査光学装置及び画像形成装置 | |
| JP2006215267A (ja) | 光走査装置および画像形成装置 | |
| JP6971626B2 (ja) | 光偏向器、光学走査装置、及び画像形成装置 | |
| JP5966551B2 (ja) | 光走査装置及び画像形成装置 | |
| JP4979081B2 (ja) | 光走査装置 | |
| JP2008191227A (ja) | 光走査装置 | |
| JP2007034166A (ja) | 走査光学装置及び画像形成装置 | |
| JP2011186098A (ja) | 光偏向器、光走査装置および画像形成装置 | |
| JP4340557B2 (ja) | 光走査装置および多色画像形成装置 | |
| JP6614419B2 (ja) | 光走査装置及び該光走査装置を備えた画像形成装置 | |
| JP2016126268A (ja) | 光走査装置及び画像形成装置 | |
| JP2023139920A (ja) | 画像形成装置 | |
| JP4946393B2 (ja) | 光走査光学装置 | |
| JP5556216B2 (ja) | 光学部品の調整構造、露光装置、及び画像形成装置 | |
| JP2010102323A (ja) | 光偏向器、光走査装置および画像形成装置 | |
| JP2006184667A (ja) | タンデムレーザ走査ユニット | |
| JP2007108577A (ja) | 走査光学装置及び画像形成装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150306 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150324 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151117 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20151118 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151224 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160510 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160523 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5949110 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |