JP5895774B2 - モータ - Google Patents
モータ Download PDFInfo
- Publication number
- JP5895774B2 JP5895774B2 JP2012193707A JP2012193707A JP5895774B2 JP 5895774 B2 JP5895774 B2 JP 5895774B2 JP 2012193707 A JP2012193707 A JP 2012193707A JP 2012193707 A JP2012193707 A JP 2012193707A JP 5895774 B2 JP5895774 B2 JP 5895774B2
- Authority
- JP
- Japan
- Prior art keywords
- magnetic field
- magnetic
- support
- detection unit
- rotation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

























Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/20—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection for measuring, monitoring, testing, protecting or switching
- H02K11/21—Devices for sensing speed or position, or actuated thereby
- H02K11/22—Optical devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/142—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices
- G01D5/145—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices influenced by the relative movement between the Hall device and magnetic fields
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P3/00—Measuring linear or angular speed; Measuring differences of linear or angular speeds
- G01P3/42—Devices characterised by the use of electric or magnetic means
- G01P3/44—Devices characterised by the use of electric or magnetic means for measuring angular speed
- G01P3/48—Devices characterised by the use of electric or magnetic means for measuring angular speed by measuring frequency of generated current or voltage
- G01P3/481—Devices characterised by the use of electric or magnetic means for measuring angular speed by measuring frequency of generated current or voltage of pulse signals
- G01P3/487—Devices characterised by the use of electric or magnetic means for measuring angular speed by measuring frequency of generated current or voltage of pulse signals delivered by rotating magnets
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/20—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection for measuring, monitoring, testing, protecting or switching
- H02K11/21—Devices for sensing speed or position, or actuated thereby
- H02K11/225—Detecting coils
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
- Optical Transform (AREA)
Description
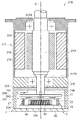
図1は本発明の実施形態によるモータを含むモータシステムを示している。図1において、モータシステム201は、本発明の実施形態によるモータ210と、制御装置220とを備えている。さらに、モータ210は、モータ本体211と、回転検出装置1とを備えている。
図3は回転検出装置1を示している。図3において、回転検出装置1は、シャフト213の回転状態、例えば回転数および回転方向を検出することができる装置である。
図16は、回転検出装置1においてモータ本体211の回転量xを検出する信号処理に関する構成を示している。図17は第1の支持体11に配置された反射ディスクを示している。
11 第1の支持体
11A、11B 面
12 第2の支持体
21、22、23、24、61、62、71、72、73、74、80、90 磁石
31、32、33、64 磁界検出部
35 磁性素子
36 コイル
41、42、43、44、45、46、65、66、101、102、111、112、121、122、131、132 磁性部材
41A 42A、43A、44A、45A、46A 平板部
41B 42B、43B、44B、45B、46B 側板部
41C 42C、43C、44C、45C、46C、101C、102C、111C、112C、121C、122C、131C、132C 対向端面
41D 42D、43D、44D、45D、46D、101D、102D 内周側端面
210 モータ
211 モータ本体
213 シャフト
237 多回転検出ユニット
238 回転位置検出ユニット(回転位置検出センサ)
242 反射ディスク
243 スリットアレイ(反射パターン)
260 光センサ
272 多回転検出部(回転数検出部)
273 多回転記憶部(記憶部)
A 軸線
R 円周
Claims (12)
- シャフトを軸線周りに回転させるモータ本体と、
前記シャフトの回転を検出する回転検出装置と、
前記シャフトの回転位置を検出する光学式の回転位置検出センサとを備え、
前記回転検出装置は、
前記軸線の周囲に前記軸線方向に互いに離間して設けられ、いずれか一方が前記シャフトの回転に伴って前記軸線を回転軸として回転する第1の支持体および第2の支持体と、
前記第1の支持体に固定され、前記第2の支持体に臨み、前記軸線の周囲に周方向にそれぞれ離間して配置され、極性が互いに異なり、前記第1の支持体と前記第2の支持体との間の領域に磁界を形成する少なくとも一対の磁界形成部と、
長さ方向において磁化の方向が変化する棒状、ワイヤ状または長板状の磁性素子にコイルを巻回することにより形成され、前記第2の支持体に固定され、前記第1の支持体に臨み、前記軸線上の点を中心とし前記少なくとも一対の磁界形成部のそれぞれと重なり合う円周の接線と前記磁性素子の長さ方向とが平行となるように配置され、前記磁界形成部により形成された磁界を検出する少なくとも1つの磁界検出部と、
磁性材料により形成され、前記第2の支持体に固定され、前記磁界検出部の長さ方向一端部において前記第1の支持体に臨む部分を覆う第1の磁性部材と、
磁性材料により形成され、前記第2の支持体に固定され、前記磁界検出部の長さ方向他端部において前記第1の支持体に臨む部分を覆う第2の磁性部材とを備え、
前記第1の磁性部材と前記第2の磁性部材とは、前記磁界検出部の長さ方向中間部に向けて互いに接近する方向に伸長し、前記磁界検出部の長さ方向中間部において間隙を介して互いに対向し、
前記回転位置検出センサは、
前記シャフトと共に回転する第1または第2の支持体に形成されるパターンを検出することにより前記シャフトの回転位置を検出することを特徴とするモータ。 - 前記回転位置検出センサは、
前記パターンとして第1または第2の支持体に形成される反射パターンと、
前記反射パターンへ光を照射し、前記反射パターンによる反射光を受光する光センサとを備えていることを特徴とする請求項1に記載のモータ。 - 前記反射パターンは、前記第1の支持体において前記磁界形成部が配置されている面の反対側の面、または前記第2の支持体において前記磁界検出部が配置されている面の反対側の面に形成されていることを特徴とする請求項2に記載のモータ。
- 前記第1の支持体は前記第2の支持体よりも前記モータ本体に接近した位置に配置されると共に前記シャフトの回転に伴って回転し、
前記反射パターンは、前記第1の支持体のうち前記モータ本体側に向いた面に形成されていることを特徴とする請求項2または3に記載のモータ。 - 前記第1の磁性部材は、前記磁界検出部の長さ方向一端部に対応する位置から前記第2の支持体の内周側および外周側に向けてそれぞれ拡がり、前記第2の支持体において前記磁界検出部の長さ方向一端部よりも内周側および外周側の領域をそれぞれ覆い、
前記第2の磁性部材は、前記磁界検出部の長さ方向他端部に対応する位置から前記第2の支持体の内周側および外周側に向けてそれぞれ拡がり、前記第2の支持体において前記磁界検出部の長さ方向他端部よりも内周側および外周側の領域をそれぞれ覆っていることを特徴とする請求項1ないし4のいずれかに記載のモータ。 - 前記磁界検出部の長さ方向中間部に対応する位置において互いに対向している前記第1の磁性部材の端面および前記第2の磁性部材の端面は、前記軸線に対して垂直でかつ前記磁界検出部の長さ方向に対して垂直な方向にそれぞれ伸長していることを特徴とする請求項1ないし5のいずれかに記載のモータ。
- 前記第1の磁性部材において前記軸線側に向いた端面は、前記磁界検出部の長さ方向と平行な方向に伸長し、前記第2の磁性部材において前記軸線側に向いた端面は、前記磁界検出部の長さ方向と平行な方向に伸長していることを特徴とする請求項1ないし6のいずれかに記載のモータ。
- 前記第1の磁性部材は前記磁界検出部の長さ方向一端部の端面を覆い、前記第2の磁性部材は前記磁界検出部の長さ方向他端部の端面を覆うことを特徴とする請求項1ないし7のいずれかに記載のモータ。
- 各磁界形成部は永久磁石であり、各磁界形成部の周方向または前記円周の接線方向の寸法は、前記磁界検出部の長さ方向中間部に対応する位置において互いに対向している前記第1の磁性部材の端面と前記第2の磁性部材の端面との間の距離よりも大きいことを特徴とする請求項1ないし8のいずれかに記載のモータ。
- 前記磁性素子は大バルクハウゼン素子であることを特徴とする請求項1ないし9のいずれかに記載のモータ。
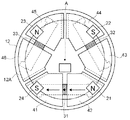
- 前記第2の支持体には前記軸線の全周を囲むように少なくとも3つの前記磁界検出部が設けられ、
前記各磁界検出部に前記第1の磁性部材および前記第2の磁性部材が設けられ、
前記複数の第1の磁性部材および前記複数の第2の磁性部材のうち周方向に互いに隣り合う各対の第1の磁性部材と第2の磁性部材とが互いに接近し、これにより形成された前記複数の第1の磁性部材および前記複数の第2の磁性部材の連続的な配列が、前記第2の支持体との間に前記各磁界検出部を介在させつつ、前記第2の支持体において前記第1の支持体に望む部分内の外周側を略全周に亘って覆っていることを特徴とする請求項1ないし10のいずれかに記載のモータ。 - 前記磁界検出部の検出結果を記憶する記憶部と、
前記記憶部に記憶された情報に基づいて前記シャフトの回転数を検出する回転数検出部とを備え、
前記記憶部は前記磁界検出部に隣接して配置されていることを特徴とする請求項1ないし11のいずれかに記載のモータ。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012193707A JP5895774B2 (ja) | 2012-09-04 | 2012-09-04 | モータ |
| US14/016,227 US9281729B2 (en) | 2012-09-04 | 2013-09-03 | Motor unit |
| EP13182809.7A EP2703783A2 (en) | 2012-09-04 | 2013-09-03 | Motor unit with magnetic rotation detector |
| CN201310395402.1A CN103683681B (zh) | 2012-09-04 | 2013-09-03 | 马达 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012193707A JP5895774B2 (ja) | 2012-09-04 | 2012-09-04 | モータ |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014048251A JP2014048251A (ja) | 2014-03-17 |
| JP2014048251A5 JP2014048251A5 (ja) | 2015-11-26 |
| JP5895774B2 true JP5895774B2 (ja) | 2016-03-30 |
Family
ID=49150744
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012193707A Active JP5895774B2 (ja) | 2012-09-04 | 2012-09-04 | モータ |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9281729B2 (ja) |
| EP (1) | EP2703783A2 (ja) |
| JP (1) | JP5895774B2 (ja) |
| CN (1) | CN103683681B (ja) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5889144B2 (ja) * | 2012-09-04 | 2016-03-22 | ヒロセ電機株式会社 | 回転検出装置 |
| JP6017323B2 (ja) * | 2013-01-15 | 2016-10-26 | ヒロセ電機株式会社 | 回転検出装置 |
| JP6020184B2 (ja) * | 2013-01-15 | 2016-11-02 | 株式会社安川電機 | モータ |
| JP5694481B1 (ja) * | 2013-10-30 | 2015-04-01 | ファナック株式会社 | 主軸とモータとの間の動力伝達部の異常を検出するモータ制御装置 |
| DE112015003052T5 (de) * | 2014-06-30 | 2017-04-13 | Hirose Electric Co., Ltd. | Bewegungsdetektorvorrichtung |
| JP6323558B2 (ja) * | 2014-07-18 | 2018-05-16 | 株式会社ニコン | エンコーダ装置、駆動装置、ステージ装置、及びロボット装置 |
| JP6319445B2 (ja) * | 2014-08-08 | 2018-05-09 | 株式会社安川電機 | モータ |
| WO2016021074A1 (ja) * | 2014-08-08 | 2016-02-11 | ヒロセ電機株式会社 | 回転検出装置 |
| CN106797160A (zh) * | 2015-09-14 | 2017-05-31 | 株式会社安川电机 | 电机用编码器和电机 |
| JP6535270B2 (ja) | 2015-10-30 | 2019-06-26 | ヒロセ電機株式会社 | 回転検出装置 |
| JP6848306B2 (ja) * | 2016-09-29 | 2021-03-24 | 株式会社ニコン | エンコーダ装置、駆動装置、ステージ装置、ロボット装置、及びエンコーダ装置の取り付け方法 |
| DE102016123210A1 (de) * | 2016-12-01 | 2018-06-07 | Centitech Gmbh | Spannungsgenerator |
| JP6834430B2 (ja) * | 2016-12-06 | 2021-02-24 | 株式会社ジェイテクト | モータ装置 |
| CN110869711B (zh) * | 2017-07-14 | 2022-02-15 | 株式会社尼康 | 编码器及驱动装置 |
| WO2020250439A1 (ja) * | 2019-06-14 | 2020-12-17 | 三菱電機株式会社 | 回転数検出器 |
| JP6842680B2 (ja) * | 2019-07-19 | 2021-03-17 | 株式会社安川電機 | エンコーダ、サーボモータ、サーボシステム |
| WO2023099008A1 (en) * | 2021-12-03 | 2023-06-08 | Fraba B.V. | Magnet-based detection system for detecting a movement of a movable object |
| CN118575400A (zh) * | 2022-01-27 | 2024-08-30 | 索尤若驱动有限及两合公司 | 具有壳体、角位置传感器和控制电子器件的电机 |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR1079880A (fr) * | 1953-03-23 | 1954-12-03 | Coupleurs directionnels résonnants | |
| JPS5937695Y2 (ja) * | 1978-11-17 | 1984-10-19 | カルソニックカンセイ株式会社 | パルス発生装置 |
| US5124625A (en) * | 1990-05-11 | 1992-06-23 | Matsushita Electric Industrial Co., Ltd. | Position control system |
| JP2000161989A (ja) * | 1998-11-30 | 2000-06-16 | Matsushita Electric Works Ltd | 回転センサ |
| JP2001133210A (ja) * | 1999-11-08 | 2001-05-18 | Matsushita Electric Ind Co Ltd | 非接触型位置センサ |
| JP4415158B2 (ja) | 2000-01-07 | 2010-02-17 | ヒロセ電機株式会社 | 磁気センサ |
| JP4552353B2 (ja) * | 2001-05-11 | 2010-09-29 | ソニー株式会社 | サーボ・アクチュエータ並びにその位置検出装置 |
| US6614223B2 (en) * | 2001-08-14 | 2003-09-02 | Delphi Technologies, Inc. | Analog angle encoder having a single piece magnet assembly surrounding an air gap |
| JP3839697B2 (ja) * | 2001-10-17 | 2006-11-01 | アルプス電気株式会社 | 回転角度センサ |
| WO2004059830A2 (de) * | 2002-12-31 | 2004-07-15 | Emb-Papst St. Georgen Gmbh & Co. Kg | Rotorstellungssensoranordnung und verfahren zur erfassung der rotorstellung |
| KR20060107516A (ko) * | 2003-10-24 | 2006-10-13 | 가부시키가이샤 야스카와덴키 | 자기식 인코더 장치 및 액츄에이터 |
| JP4811914B2 (ja) * | 2005-09-30 | 2011-11-09 | Jfeスチール株式会社 | パイプの曲げ加工装置および方法 |
| ATE507465T1 (de) * | 2007-05-14 | 2011-05-15 | Ebm Papst St Georgen Gmbh & Co | Elektronisch kommutierter asynchronmotor |
| US8466646B2 (en) * | 2008-04-02 | 2013-06-18 | Continental Automotive Systems, Inc. | Apparatus and method for determining angular position |
| JP5304464B2 (ja) * | 2008-09-11 | 2013-10-02 | 株式会社安川電機 | エンコーダ付モータ |
| DE102009042473B4 (de) * | 2009-09-24 | 2019-01-24 | Continental Automotive Gmbh | Verfahren zur Auswertung von Signalen eines Winkelsensors |
| JP5099459B2 (ja) * | 2010-03-19 | 2012-12-19 | 株式会社安川電機 | 光全周エンコーダ及びモータシステム |
| JP5472045B2 (ja) * | 2010-11-08 | 2014-04-16 | 株式会社安川電機 | エンコーダ付モータ及びモータ用エンコーダ |
-
2012
- 2012-09-04 JP JP2012193707A patent/JP5895774B2/ja active Active
-
2013
- 2013-09-03 EP EP13182809.7A patent/EP2703783A2/en not_active Withdrawn
- 2013-09-03 US US14/016,227 patent/US9281729B2/en not_active Expired - Fee Related
- 2013-09-03 CN CN201310395402.1A patent/CN103683681B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20140062366A1 (en) | 2014-03-06 |
| JP2014048251A (ja) | 2014-03-17 |
| CN103683681A (zh) | 2014-03-26 |
| CN103683681B (zh) | 2016-08-17 |
| EP2703783A2 (en) | 2014-03-05 |
| US9281729B2 (en) | 2016-03-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5895774B2 (ja) | モータ | |
| JP6020184B2 (ja) | モータ | |
| JP5889144B2 (ja) | 回転検出装置 | |
| JP5880577B2 (ja) | モータ、モータシステムおよびモータ用エンコーダ | |
| JP6017323B2 (ja) | 回転検出装置 | |
| JP5886269B2 (ja) | 回転検出装置およびモータ | |
| JP2017083393A (ja) | 回転検出装置 | |
| WO2020195003A1 (ja) | モータ | |
| JP6165480B2 (ja) | Pm型ステッピングモータ | |
| CN110487305A (zh) | 旋转检测装置 | |
| JP2019200100A (ja) | 回転検出装置 | |
| JP5964117B2 (ja) | 回転検出装置 | |
| JP2008286285A (ja) | 電磁クラッチ | |
| JP7469241B2 (ja) | 回転検出装置 | |
| JP2019200101A (ja) | 回転検出装置 | |
| JP7453166B2 (ja) | 回転検出装置 | |
| JP2010119010A (ja) | コイル−ワイヤ分離型電気パルス発生装置 | |
| JP2022116385A (ja) | 回転検出器及びそれを備えたモータ | |
| JP2023051163A (ja) | 回転検出器 | |
| JP2019200099A (ja) | 回転検出装置 | |
| JP2010210288A (ja) | エンコーダ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150825 |
|
| A256 | Written notification of co-pending application filed on the same date by different applicants |
Free format text: JAPANESE INTERMEDIATE CODE: A2516 Effective date: 20150915 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151008 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160202 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160216 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160215 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5895774 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |