JP2019200101A - 回転検出装置 - Google Patents
回転検出装置 Download PDFInfo
- Publication number
- JP2019200101A JP2019200101A JP2018094070A JP2018094070A JP2019200101A JP 2019200101 A JP2019200101 A JP 2019200101A JP 2018094070 A JP2018094070 A JP 2018094070A JP 2018094070 A JP2018094070 A JP 2018094070A JP 2019200101 A JP2019200101 A JP 2019200101A
- Authority
- JP
- Japan
- Prior art keywords
- magnetic
- magnetic field
- circle
- wire
- reference axis
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images
















Landscapes
- Transmission And Conversion Of Sensor Element Output (AREA)
Abstract
【課題】回転検出装置の小型化を図る。【解決手段】4つの磁界形成部11は、基準軸Z上の点を中心とする円Aに沿って間隔を置いて配置され、各磁界形成部11の2つの磁極は円Aの径方向に並んでいる。3つの磁界検出部21は、磁界形成部11が配置された領域の上方に、基準軸Z上の点を中心とする円Bにおいて中心角が180度以下の円弧上に間隔をおいて配置され、各磁界検出部21の磁性線材の軸線が円Bを含む平面上を伸長しかつ円Bの径方向および接線方向の双方に対して傾斜するように配置されている。3つの磁束制御部30は3つの磁界検出部21の下方にそれぞれ配置され、各磁束制御部30は、磁界検出部21の一部を覆う磁性部材31、32を有し、磁界形成部11により形成される磁界の磁束が、磁界検出部21の磁性線材をその軸線方向に通るように、当該磁束の方向を変化させる。【選択図】図2
Description
本発明は、磁気を用いて被検出体の回転を検出する回転検出装置に関する。
大バルクハウゼン効果を利用した磁気センサと磁石とを用いた回転検出装置は知られている。この種の回転検出装置では、例えば、磁気センサを支持体に固定し、支持体に対して回転する回転体に磁石を固定し、回転体が回転することによって生じる磁界の変化を磁気センサにより検出する。磁気センサは、大バルクハウゼン効果を生ずる磁性線材の周囲にコイルを巻回することにより形成される。大バルクハウゼン効果を生ずる磁性線材は、外部磁界が変化すると磁化方向が瞬時に反転する性質を有している。磁性線材の磁化方向が反転したときにコイルに流れる電流を検出信号として取り出し、その検出信号に基づいて回転体の回転を検出する。下記の特許文献1、2および3には、このような回転検出装置の例がそれぞれ記載されている。
ところで、磁性線材は細長い形状を有しているため、それを搭載した磁気センサも細長い形状となる。そのため、磁気センサの配置の仕方如何によっては回転検出装置が大型化してしまうことがある。また、磁性線材により磁界の変化を検出することができるようにするためには、回転体の回転時に磁石が磁気センサに接近したときに、磁石により形成された磁界の磁束が磁性線材をその軸線方向に通るようにすることが必要であり、このような磁界が形成されるように、磁気センサおよび磁石の配置を決めなければならない。
特許文献1に記載された回転検出装置では、同文献の図1に示されているように、磁気センサおよび棒磁石が、回転体の回転軸と同じ方向となるように、それぞれ立てて配置されている。この構成では、回転検出装置が縦長となり、回転検出装置の小型化が困難である。
また、特許文献2に記載された回転検出装置では、同文献の図1に示されているように、磁気センサが回転体の回転軸に直交する平面上に寝かせて配置されている。また、磁石も、回転軸に直交する平面上に配置されている。また、同文献の図4に示されているように、3つの磁気センサが、回転体が回転したときの磁石の回転の軌跡である円の接線方向に対し、磁性線材の軸線方向が平行となるように配置されている。この回転検出装置では、3つの磁気センサが円板状の支持体の面の略全域を用いて効率良く配置されており、これにより、回転検出装置の小型化が図られている。
しかしながら、特許文献2に記載された回転検出装置の構成において、磁気センサの個数を増加させた場合には、磁気センサを配置する支持体の面の面積を大きくしなければならなくなり、回転検出装置の小型化が困難になる。また、磁気センサを配置することができる面の形状や面積は、回転検出装置を取り付ける被検出装置の構成等に基づいて制約を受けることがある。例えば、磁気センサを配置することができる面が直径の小さい円板の面の外周側の一部、あるいはリング状の部材の軸方向の端面の一部に制限された場合、磁気センサの個数が3つであったしても、それらの磁気センサを、磁石の回転の軌跡の円の接線方向に平行となるように配置することが難しくなる。すなわち、このように磁気センサを配置しようとすると、隣り合う磁気センサの端部同士が接触してしまい、磁気センサを配置することができなくなるおそれがある。また、磁気センサを配置できたとしても、磁気センサのコイルから検出信号を取り出すためのケーブル等を磁気センサに接続するスペースを確保することが困難になるおそれがある。
本発明は例えば上述したような問題に鑑みなされたものであり、本発明の課題は小型な回転検出装置を提供することにある。
上記課題を解決するために、本発明の回転検出装置は、いずれか一方が他方に対して基準軸を回転軸として回転する第1の部分および第2の部分を有する被検出体に設けられる回転検出装置であって、前記被検出体の前記第1の部分に設けられ、磁界を形成する少なくとも4つの磁界形成部と、前記被検出体の前記第2の部分に設けられ、磁界を検出する少なくとも3つの磁界検出部と、前記被検出体の前記第2の部分に設けられ、前記各磁界形成部が形成する磁界における磁束の方向を制御する少なくとも3つの磁束制御部とを備え、前記少なくとも4つの磁界形成部は、前記基準軸の軸方向一側の領域に、前記基準軸上の点を中心とし前記基準軸と直交する所定長の半径を有する円Aに沿って間隔を置いて配置され、前記各磁界形成部において、前記磁界を形成する相反する2つの磁極は前記円Aの径方向に並び、前記少なくとも3つの磁界検出部は、前記基準軸の軸方向他側に位置する領域に、前記基準軸上の点を中心とし、前記基準軸と直交する前記所定長の半径を有する円Bにおいて中心角が180度以下の円弧上に間隔をおいて配置され、前記各磁界検出部は、磁性線材および前記磁性線材の周囲に設けられたコイルを有し、前記磁性線材の軸線が前記円Bを含む平面上を伸長しかつ前記円Bの径方向および接線方向の双方に対して傾斜するように配置され、前記少なくとも3つの磁束制御部は、前記基準軸の軸方向一側の領域と前記基準軸の軸方向他側の領域との間において前記少なくとも3つの磁界検出部とそれぞれ対応する位置に配置され、前記各磁束制御部は、対応する前記磁界検出部の一部を覆う磁性部材を有し、前記磁界形成部により形成される磁界の磁束が、対応する前記磁界検出部の前記磁性線材をその軸線方向に通るように、当該磁束の方向を変化させることを特徴とする。
このような構成を有する本発明の回転検出装置において、磁界形成部、磁界検出部および磁束制御部の配置関係は次の通りである。すなわち、少なくとも4つの磁界形成部は、基準軸(被検出体の第1の部分または第2の部分の回転軸)の軸方向一側の領域に、基準軸上の点を中心とし、基準軸と直交する所定長の半径を有する円Aに沿って間隔を置いて配置されている。また、少なくとも3つの磁界検出部は、基準軸の軸方向他側に位置する領域に、基準軸上の点を中心とし、基準軸と直交する上記所定長の半径を有する円Bにおいて中心角が180度以下の円弧上に沿って間隔をおいて配置されている。円Aと円Bとの半径はいずれも同一の所定長であるので、例えば被検出体の第1の部分が第2の部分に対して回転する構成である場合には、各磁界形成部が、基準軸の軸方向において各磁界検出部の一側を通過し、一方、被検出体の第2の部分が第1の部分に対して回転する構成である場合には、各磁界検出部が基準軸の軸方向において各磁界形成部の他側を通過する。また、複数の磁束制御部は、基準軸の軸方向一側の領域と基準軸の軸方向他側の領域との間において複数の磁界検出部とそれぞれ対応する位置に配置されている。したがって、被検出体の第1の部分が第2の部分に対して回転する構成である場合には、各磁界形成部が、基準軸の軸方向において各磁束制御部の一側を通過し、一方、被検出体の第2の部分が第1の部分に対して回転する構成である場合には、各磁束制御部が、磁界検出部と共に、基準軸の軸方向において各磁界形成部の他側を通過する。
さて、磁界形成部が有する磁石は、その相反する2つの磁極が円Aの径方向に並ぶように配置されている。このため、被検出体の第1の部分または第2の部分の回転時に、磁界形成部がいずれの磁界検出部および磁束制御部からも離れているときには、磁界形成部により形成される磁界の磁束は円Aの径方向を向いている。一方、磁界形成部と磁界検出部とが基準軸の軸方向において互いに対向したときには、磁界形成部と磁界検出部との間に位置する磁束制御部により、磁界形成部により形成された磁界の磁束の方向が、磁界検出部の磁性線材をその軸線方向に通るように変えられる。これにより、磁界形成部により形成された磁界の磁束が磁性線材に集中し、磁性線材を軸線方向に通る磁束の量が多くなる。したがって、磁界形成部と磁界検出部との対向時には、磁性線材の磁化方向の反転が確実に生じる。よって、磁界形成部と磁界検出部との接近を高精度に検出することができ、回転検出の精度を高めることができる。
また、磁界形成部の個数を少なくとも4つとし、磁界検出部の個数を少なくとも3とすることで、例えば、上記特許文献3に記載された回転検出処理を適用することができ、回転検出精度を高めることができる。
また、少なくとも3つの磁界検出部は、基準軸上の点を中心とし、基準軸と直交する所定長の半径を有する円Bにおいて、中心角が180度以下の円弧上に配置されている。したがって、回転検出装置を取り付ける被検出装置の構成上の都合等により、例えば、磁気センサを配置し得る領域が、円板状の支持体の軸方向の端面の外周側の一部、またはリング状の支持体の軸方向の端面の一部に制限された場合でも、そのような制限された領域に少なくとも3つの磁界検出部を配置することができ、高精度な回転検出を行うことができる回転検出装置を構築することができる。また、磁気センサを配置し得る領域として、円板状の支持体の軸方向の端面の全周、またはリング状の支持体の軸方向の端面の全周を確保することができる場合には、より多くの磁界検出部を支持体に配置することができる。したがって、回転検出装置における磁界検出部の個数を増加させることができる。
また、各磁界検出部は円Bの径方向および接線方向の双方に対して傾斜するように配置されているので、少なくとも3つの磁界検出部を、磁界検出部の端部同士を接触させることなく各磁界検出部を詰めて並べることができる。したがって、少なくとも3つの磁界検出部を配置する領域が、半径が小さく、中心角が180度以下の円弧状の領域に制限された場合でも、少なくとも3つの磁界検出部を適切な間隔を空けて配置することができる。よって、小型の回転検出装置を実現することができる。
また、上記本発明の回転検出装置において、前記各磁界形成部は2つの磁石を有し、前記2つの磁石は、前記基準軸の軸方向他側を向いた端部の磁極が互いに異なるように前記円Aの径方向に並んで配置されている構成としてもよい。
このような構成を有する本発明の回転検出装置によれば、円Aの径方向の磁界を形成することができる。
また、上記本発明の回転検出装置において、前記磁性線材は大バルクハウゼン効果を生ずる磁性線材である構成としてもよい。
このような構成を有する本発明の回転検出装置によれば、外部磁界の方向の変化に応じて磁化方向が急激に反転する性質を有する磁性線材を用いることにより、磁界形成部と磁界検出部との接近を高精度に検出することでき、回転検出の精度を高めることができる。また、外部電源を用いずに回転検出を行うことができる。
また、上記本発明の回転検出装置において、前記磁性部材は軟質磁性材料により形成されている構成としてもよい。
このような構成を有する回転検出装置によれば、磁界形成部と磁束検出部とが基準軸の軸方向において互いに対向したときに、磁界形成部により形成される磁界の磁束を磁性部材により磁性線材に集中させることができ、磁性線材をその軸線方向に通る磁束の量を増やすことができる。
本発明によれば、回転検出装置の小型化を図ることができる。
(回転検出装置)
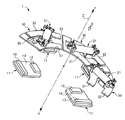
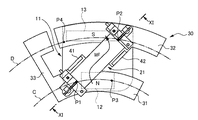
図1は本発明の実施形態の回転検出装置1を示している。図2は回転検出装置1を図1中の矢示II方向から見た状態を示し、図3は回転検出装置1を図2中の矢示III方向から見た状態を示している。回転検出装置1は、例えばモータ等の被検出体の回転を検出する装置である。図1中の基準軸Zは被検出体の回転軸である。回転検出装置1の構成を説明するに当たり、説明の便宜上、矢印dが指し示す、基準軸Zの一側の方向を下とし、矢印uが指し示す、基準軸Zの他側の方向を上とする。
図1は本発明の実施形態の回転検出装置1を示している。図2は回転検出装置1を図1中の矢示II方向から見た状態を示し、図3は回転検出装置1を図2中の矢示III方向から見た状態を示している。回転検出装置1は、例えばモータ等の被検出体の回転を検出する装置である。図1中の基準軸Zは被検出体の回転軸である。回転検出装置1の構成を説明するに当たり、説明の便宜上、矢印dが指し示す、基準軸Zの一側の方向を下とし、矢印uが指し示す、基準軸Zの他側の方向を上とする。
図1に示すように、回転検出装置1は、4つの磁界形成部11、3つの磁界検出部21、および3つの磁束制御部30を備えている。図3に示すように、4つの磁界形成部11は被検出体の第1の部分51に固定されている。また、3つの磁界検出部21および3つの磁束制御部30は被検出体の第2の部分52に固定されている。被検出体において、第1の部分51は、第2の部分52に対して基準軸Zを回転軸として回転する。したがって、各磁界形成部11は、各磁界検出部21および各磁束制御部30に対して回転する。被検出体がモータである場合、例えば、第1の部分51はモータの出力軸と共に回転する支持台であり、第2の部分52はモータの筐体等に固定された支持台である。
(磁界形成部)
図4は4つの磁界形成部11を示している。4つの磁界形成部11は、基準軸Zの軸方向一側の領域、すなわち、本実施形態では回転検出装置1における下側の領域に配置されている。また、4つの磁界形成部11は、図4に示すように、基準軸Z上の点を中心とし、基準軸Zと直交する所定長の半径を有する円Aに沿って90度間隔に配置されている。
図4は4つの磁界形成部11を示している。4つの磁界形成部11は、基準軸Zの軸方向一側の領域、すなわち、本実施形態では回転検出装置1における下側の領域に配置されている。また、4つの磁界形成部11は、図4に示すように、基準軸Z上の点を中心とし、基準軸Zと直交する所定長の半径を有する円Aに沿って90度間隔に配置されている。
各磁界形成部11において、磁界を形成する相反する2つの磁極は円Aの径方向に並んでいる。具体的には、各磁界形成部11は2つの磁石12、13を有し、2つの磁石12、13は、上方を向いた端部の磁極が互いに異なるように円Aの径方向に並んで配置されている。また、2つの磁石12、13は支持板14に固定されている。以下、2つの磁石12、13のうち、内周側に配置されている磁石を内周側磁石12といい、外周側に配置されている磁石を外周側磁石13という。
各磁界形成部11は、内周側磁石12と外周側磁石13とにより、円Aの径方向の磁界を形成する。また、4つの磁界形成部11のうち、2つの磁界形成部11において、内周側磁石12はその上方を向いた端部の磁極がN極となるように配置され、外周側磁石13はその上方を向いた端部の磁極がS極となるように配置されている。すなわち、これら2つの磁界形成部11は、円Aの径方向外向きの磁界を形成する。一方、4つの磁界形成部11のうち、残りの2つの磁界形成部11において、内周側磁石12はその上方を向いた端部の磁極がS極となるように配置され、外周側磁石13はその上方を向いた端部の磁極がN極となるように配置されている。すなわち、これら2つの磁界形成部11は、円Aの径方向内向きの磁界を形成する。径方向外向きの磁界を形成する磁界形成部11と、径方向内向きの磁界を形成する磁界形成部11とは円Aの周方向に交互に配置されている。
図5は4つの磁界形成部11のうちの1つを拡大して示している。図5に示すように、各磁界形成部11において、内周側磁石12および外周側磁石13はそれぞれ、板状に形成され、上方を向いた端面の形状が四角形である。
また、各磁界形成部11において、内周側磁石12および外周側磁石13のそれぞれの形状および配置は、各磁界形成部11により形成される磁界の方向が正確に径方向となるように設定されている。すなわち、周方向において、外周側磁石13の一側の端部13Aが、円Aの中心を通りかつ内周側磁石12の一側の端部12Aに接する直線L1を超えているが、超えている量は僅かである。また、周方向において、外周側磁石13の他側の端部13Bが、円Aの中心を通りかつ内周側磁石12の他側の端部12Bに接する直線L2に接近している。また、この結果、円Aの接線方向において、外周側磁石13の長さが内周側磁石12の長さよりも長くなっている。
また、各磁界形成部11により形成される磁界の磁束密度を高めるために、各磁界形成部11において、内周側磁石12の上方を向いた端面の面積と、外周側磁石13の上方を向いた端面の面積とが互いに略等しくなるように、内周側磁石12および外周側磁石13のそれぞれの形状が設定されている。
また、各磁界形成部11において、内周側磁石12および外周側磁石13のそれぞれの形状および配置は、被検出体の第1の部分51が第2の部分52に対して回転したときに、内周側磁石12と外周側磁石13とが、磁束制御部30を構成する磁性部材31、32、33の下方に同時に到達しないように、または磁性部材31、32、33の下方から同時に離脱しないように設定されている。すなわち、周方向において、外周側磁石13の一側の端部13Aおよび他側の端部13Bがそれぞれ直線L1、L2に接していない。この構成により、後述するように、被検出体の第1の部分51の回転におけるコギングを抑制することができる。
(磁界検出部)
図6は3つの磁界検出部21を示し、図7は3つの磁界検出部21のうちの1つを拡大して示している。図7に示すように、各磁界検出部21は、磁性線材22、コイル23、ボビン24および一対の接続部材25を有している。コイル23は磁性線材22の周囲に設けられている。具体的には、磁性線材22はボビン24内に収容されている。コイル23は、ボビン24の外周側に巻線を巻回することにより形成されている。一対の接続部材25はボビン24の両端側にそれぞれ設けられている。各接続部材25は導電材料により形成され、各接続部材25の一端部には巻線の端部が接続されている。また、各接続部材25の他端部には、磁界検出部21から検出信号を取り出すための回路基板やケーブル等が接続される。
図6は3つの磁界検出部21を示し、図7は3つの磁界検出部21のうちの1つを拡大して示している。図7に示すように、各磁界検出部21は、磁性線材22、コイル23、ボビン24および一対の接続部材25を有している。コイル23は磁性線材22の周囲に設けられている。具体的には、磁性線材22はボビン24内に収容されている。コイル23は、ボビン24の外周側に巻線を巻回することにより形成されている。一対の接続部材25はボビン24の両端側にそれぞれ設けられている。各接続部材25は導電材料により形成され、各接続部材25の一端部には巻線の端部が接続されている。また、各接続部材25の他端部には、磁界検出部21から検出信号を取り出すための回路基板やケーブル等が接続される。
磁性線材22は大バルクハウゼン効果を生ずる磁性線材である。磁性線材22は、例えば、鉄およびコバルトを含む半硬質磁性材料により形成され、直径が例えばおよそ0.1mm〜1mmで、長さが例えばおよそ30mmの線材である。磁性線材22は、例えば、上記半硬質磁性材料を線引きし、方向を変えながら複数回捻ることにより形成されている。磁性線材22は、磁化が容易な方向が当該磁性線材22の軸線方向である一軸異方性を有している。また、磁性線材22において、その外周側部分よりも中心側部分の方が保磁力が大きい。磁性線材2は外部磁界の方向の変化に応じて磁性線材22(その外周側部分)の磁化方向が急反転する性質を有している。
3つの磁界検出部21は、基準軸Zの軸方向他側、すなわち、回転検出装置1における上側の領域に配置されている。3つの磁界検出部21は、図1に示すように、4つの磁界形成部11が配置されている領域の上方に配置されている。また、3つの磁界検出部21は、図6に示すように、基準軸Z上の点を中心とし、基準軸Zと直交する所定長の半径を有する円Bに沿って60度間隔に配置されている。円Bの半径の長さは上記円Aの半径の長さと同じである。また、3つの磁界検出部21は、円Bにおいて中心角が180度以下の円弧上に配置されている。
また、各磁界検出部21は、磁性線材22の軸線Wが円Bを含む平面上を伸長し、かつ円Bの径方向および接線方向の双方に対して傾斜するように配置されている。なお、図6において、L3が円Bの径方向を示す直線であり、L4が円Bの接線方向を示す直線である。各磁界検出部21は、磁性線材22の軸線Wが円Bの接線方向に対して例えば30度〜60度程度傾斜するように配置することが好ましい。本実施形態において、各磁界検出部21は、磁性線材22の軸線Wが円Bの接線方向に対しておよそ45度傾斜するように配置されている。
(磁束制御部)
図8は3つの磁束制御部30を示している。3つの磁束制御部30は、基準軸Zの軸方向一側の領域と軸方向他側の領域との間、すなわち、図1に示すように、各磁界形成部11が配置された領域と、各磁界検出部21が配置された領域との間に配置されている。また、3つの磁束制御部30は、3つの磁界検出部21とそれぞれ上下方向において対応する位置に配置されている。すなわち、3つの磁束制御部30は3つの磁界検出部21の下方にそれぞれ配置されている。各磁束制御部30は、磁界形成部11が形成する磁界における磁束の方向を制御するヨークとしての機能を有している。具体的には、各磁束制御部30は、磁界形成部11により形成される磁界の磁束が磁界検出部21の磁性線材22をその軸線方向に通るように当該磁束の方向を変化させる機能を有している。
図8は3つの磁束制御部30を示している。3つの磁束制御部30は、基準軸Zの軸方向一側の領域と軸方向他側の領域との間、すなわち、図1に示すように、各磁界形成部11が配置された領域と、各磁界検出部21が配置された領域との間に配置されている。また、3つの磁束制御部30は、3つの磁界検出部21とそれぞれ上下方向において対応する位置に配置されている。すなわち、3つの磁束制御部30は3つの磁界検出部21の下方にそれぞれ配置されている。各磁束制御部30は、磁界形成部11が形成する磁界における磁束の方向を制御するヨークとしての機能を有している。具体的には、各磁束制御部30は、磁界形成部11により形成される磁界の磁束が磁界検出部21の磁性線材22をその軸線方向に通るように当該磁束の方向を変化させる機能を有している。
図9は3つの磁束制御部30のうちの1つを拡大して示している。図9に示すように、各磁束制御部30は、内周側に配置された第1の磁性部材31と、外周側に配置された第2の磁性部材32と、第1の磁性部材31および第2の磁性部材32の周方向一側に配置され、第1の磁性部材31に接続された第3の磁性部材33とを有している。これら磁性部材31、32、33はそれぞれ、例えば、純鉄、ケイ素綱、パーロマイ、アモルファス金属等の軟質磁性材料により形成されている。
第1の磁性部材31および第2の磁性部材32の形状および配置について詳説する。図9において、各磁界形成部11が配置された領域と、各磁界検出部21が配置された領域との間に位置し、基準軸Zと直交する平面をKとする。また、平面Kが基準軸Zと交わる点をP0とする。また、平面K内において、磁界検出部21の磁性線材22の内周側端部と対応する点をP1とし、磁性線材22の外周側端部と対応する点をP2とし、点P0を中心として点P1を通る円をCとし、点P0を中心として点P2を通る円をDとする。また、平面K内において、点P2を通る円Dの半径と円Cとが交わる点をP3とし、点P1を通る円Dの半径と円Dとが交わる点をP4とする。この場合、第1の磁性部材31は、点P1および点P3を通る円Cの円弧に沿って伸長している。また、第2の磁性部材32は、点P2および点P4を通る円Dの円弧に沿って伸長している。
第1の磁性部材31には第2の磁性部材32に向かって伸長する第1の伸長部41が形成されている。また、第2の磁性部材32には第1の磁性部材31に向かって伸長する第2の伸長部42が形成されている。第1の伸長部41および第2の伸長部42はそれぞれ磁性線材22の軸線Wに沿って伸長している。また、第1の伸長部41の伸長側端部と第2の伸長部42の伸長側端部とは、磁性線材22の軸線方向中央に対応する位置において間隙を介して互いに対向している。また、第1の伸長部41および第2の伸長部42のそれぞれの伸長側端面41A、42Aは磁性線材22の軸線Wに対して垂直である。
また、平面K内において第1の伸長部41の伸長側端部に対応する点をP5とし、平面K内において第2の伸長部42の伸長側端部に対応する点をP6としたとき、第1の磁性部材31は、平面K上において点P1、点P3および点P5を含むように拡がる板状に形成され、第2の磁性部材32は、平面K上において点P2、点P4および点P6を含むように拡がる板状に形成されている。図1に示すように、第1の磁性部材31は、対応する磁界検出部21の伸長方向一側(内周側)の部分を下方から覆ており、第2の磁性部材32は、対応する磁界検出部21の伸長方向他側(外周側)の部分を下方から覆っている。
また、図9に示すように、第1の磁性部材31の第1の伸長部41において、その付け根の部分(点P1辺り)から突出側端部(点P5)を見たときに左側に位置する縁部には、上方に立ち上がる立ち上がり部45が形成されている。これと同様に、第2の磁性部材32の第2の伸長部42にも立ち上がり部45が形成されている。
第3の磁性部材33は、第1の磁性部材31および第2の磁性部材32の双方の周方向一側に、第1の磁性部材31および第2の磁性部材32の双方と隣接して配置され、円Cと円Dとの間を径方向に伸長している。また、第3の磁性部材33の内周側端部は第1の磁性部材31に接続され、第3の磁性部材33の外周側端部は第2の磁性部材32から離れている。
(回転検出装置の動作)
被検出体の第1の部分51が第2の部分52に対して基準軸Zを回転軸として時計回り方向または反時計回り方向に回転すると、4つの磁界形成部11が、3つの磁界検出部21および3つの磁束制御部30に対して基準軸Zの周りを回転する。被検出体の第1の部分51には、径方向外向きの磁界を形成する磁界形成部11と、径方向内向きの磁界を形成する磁界形成部11とが周方向に交互に配置されているので、例えば、被検出体の第1の部分51が時計回り方向および反時計回り方向のうちのいずれか一方の方向に一定の速度で回転を続けた場合、各磁束制御部30には径方向において向きが周期的に反転する交番磁界がかかる。すなわち、磁界形成部11が磁束制御部30の下方を通過する度に、磁束制御部30にかかる磁界の方向が径方向外向きから径方向内向きへ変化し、または径方向内向きから径方向外向きへ変化する。磁束制御部30にかかった磁界における磁束の方向は、磁束制御部30により、径方向から、磁界検出部21の磁性線材22の軸線方向に変えられる。したがって、磁界形成部11が磁束制御部30の下方を通過する度に、磁界検出部21の磁性線材22を通る磁束の方向は、軸線方向における一側から他側へ向かう方向から、軸線方向における他側から一側へ向かう方向へ変化し、または軸線方向における他側から一側へ向かう方向から、軸線方向における一側から他側へ向かう方向へ変化する。このような磁性線材22を通る磁束の方向の変化に応じ、磁性線材22の磁化方向が反転し、コイル23に電流が流れる。3つの磁界検出部21のそれぞれのコイル23に流れる電流は、それぞれ検出信号として、回転検出装置1の外部に設けられた演算処理回路に入力される。これら3つの検出信号に基づいて演算処理回路により被検出体の第1の部分51の回転数がカウントされる。なお、回転数をカウントする処理には、上記特許文献3に記載された回転検出処理を用いることができる。
被検出体の第1の部分51が第2の部分52に対して基準軸Zを回転軸として時計回り方向または反時計回り方向に回転すると、4つの磁界形成部11が、3つの磁界検出部21および3つの磁束制御部30に対して基準軸Zの周りを回転する。被検出体の第1の部分51には、径方向外向きの磁界を形成する磁界形成部11と、径方向内向きの磁界を形成する磁界形成部11とが周方向に交互に配置されているので、例えば、被検出体の第1の部分51が時計回り方向および反時計回り方向のうちのいずれか一方の方向に一定の速度で回転を続けた場合、各磁束制御部30には径方向において向きが周期的に反転する交番磁界がかかる。すなわち、磁界形成部11が磁束制御部30の下方を通過する度に、磁束制御部30にかかる磁界の方向が径方向外向きから径方向内向きへ変化し、または径方向内向きから径方向外向きへ変化する。磁束制御部30にかかった磁界における磁束の方向は、磁束制御部30により、径方向から、磁界検出部21の磁性線材22の軸線方向に変えられる。したがって、磁界形成部11が磁束制御部30の下方を通過する度に、磁界検出部21の磁性線材22を通る磁束の方向は、軸線方向における一側から他側へ向かう方向から、軸線方向における他側から一側へ向かう方向へ変化し、または軸線方向における他側から一側へ向かう方向から、軸線方向における一側から他側へ向かう方向へ変化する。このような磁性線材22を通る磁束の方向の変化に応じ、磁性線材22の磁化方向が反転し、コイル23に電流が流れる。3つの磁界検出部21のそれぞれのコイル23に流れる電流は、それぞれ検出信号として、回転検出装置1の外部に設けられた演算処理回路に入力される。これら3つの検出信号に基づいて演算処理回路により被検出体の第1の部分51の回転数がカウントされる。なお、回転数をカウントする処理には、上記特許文献3に記載された回転検出処理を用いることができる。
(第1および第2の磁性部材の作用)
第1の磁性部材31および第2の磁性部材32の作用について図9、図10および図11を用いて説明する。図10は、磁界形成部11が磁界検出部21、第1の磁性部材31および第2の磁性部材32の下方に位置している状態を示している。図11は、図10中の矢示XI−XI方向から見た磁界形成部11、磁界検出部21、第1の磁性部材31および第2の磁性部材32を模式的に示している。
第1の磁性部材31および第2の磁性部材32の作用について図9、図10および図11を用いて説明する。図10は、磁界形成部11が磁界検出部21、第1の磁性部材31および第2の磁性部材32の下方に位置している状態を示している。図11は、図10中の矢示XI−XI方向から見た磁界形成部11、磁界検出部21、第1の磁性部材31および第2の磁性部材32を模式的に示している。
被検出体の第1の部分51が第2の部分52に対して回転し、図10に示すように、磁界形成部11が磁界検出部21の下方へ移動し、両者が上下方向に対向したとき、磁界形成部11と磁界検出部21とが互い最も接近する。また、磁界形成部11と磁界検出部21とが上下方向に対向したとき、磁界形成部11の内周側磁石12が第1の磁性部材31と上下方向において対向し、磁界形成部11の外周側磁石13が第2の磁性部材32と上下方向において対向する。このとき、例えば、内周側磁石12の上方を向いた端部がN極であり、外周側磁石13の上方を向いた端部がS極である場合には、磁界形成部11により形成された磁界における多くの磁束は、図11中の矢印MFが示す通り、内周側磁石12から、第1の磁性部材31に形成された第1の伸長部41を通り、磁界検出部21の磁性線材22の軸線方向一側(内周側)の部分に入る。続いて、当該磁束は、磁性線材22をその軸線方向に通り、磁性線材22の軸線方向他側(外周側)の部分から、第2の磁性部材32に形成された第2の伸長部42を通り、外周側磁石13に至る。また、内周側磁石12がS極であり、外周側磁石13がN極である場合には、磁界形成部11により形成された磁界における多くの磁束は上記磁束の経路を逆方向に通る。このように、磁界形成部11により形成される磁界の磁束の方向が、第1の磁性部材31および第2の磁性部材32によって、円Aの径方向から磁界検出部21の磁性線材22の軸線方向に変えられる。この結果、磁界形成部11により形成される磁界の磁束が磁性線材22に集中し易くなり、磁性線材22をその軸線方向に通る磁束の量を多くすることができる。したがって、磁界形成部11と磁界検出部21との対向時に磁性線材22の磁化方向の反転を確実にかつ顕著に生じさせることができる。よって、磁界形成部11と磁界検出部21との接近を高精度に検出することができ、回転検出の精度を高めることができる。
また、図9に示すように、第1の伸長部41および第2の伸長部42はそれぞれ磁性線材22の軸線Wに沿って伸長している。この構成により、図10に示すように、磁界形成部11と磁界検出部21とが上下方向において互いに対向したとき、第1の伸長部41を通る磁束の方向および第2の伸長部42を通る磁束の方向をそれぞれ、磁性線材22の軸線方向と一致させることができる。これにより、第1の伸長部41から磁性線材22に出入りする磁束の量、および第2の伸長部42から磁性線材22に出入りする磁束の量をそれぞれ増やすことができる。このように、磁界形成部11と磁界検出部21とが互いに対向したときに、磁界形成部11により形成される磁界の磁束が磁性線材22に集中する度合いを高めることができる。
また、図9に示すように、第1の伸長部41の伸長側端部と第2の伸長部42の伸長側端部とは、磁性線材22の軸線方向中央に対応する位置において間隙を介して互いに対向している。この構成により、図10に示すように、磁界形成部11と磁界検出部21とが上下方向において互いに対向したとき、磁界形成部11により形成された磁界における多くの磁束を、第1の伸長部41から磁性線材22の軸線方向中央部分を軸線方向に通って第2の伸長部42に至るように、または第2の伸長部42から磁性線材22の軸線方向中央部分を軸線方向に通って第1の伸長部41に至るように導くことができる。このように、磁界形成部11により形成された磁界における多く磁束を、検出感度が高い(磁化方向の反転が顕著に生ずる)磁性線材22の軸線方向中央部に通すことができるので、磁界形成部11と磁界検出部21との接近を高精度に検出することができ、回転検出の精度を高めることができる。
また、図9に示すように、第1の伸長部41および第2の伸長部42のそれぞれの伸長側端面41A、42Aは磁性線材22の軸線Wに対して垂直である。この構成により、図10に示すように、磁界形成部11と磁界検出部21とが上下方向において互いに対向したときに、磁界形成部11により形成された磁界の磁束は、第1の伸長部41の伸長側端面41Aから当該伸長側端面41Aに対して垂直な方向に進出し、または第1の伸長部41の伸長側端面41Aに当該伸長側端面41Aに対して垂直な方向に進入する。同様に、磁界形成部11により形成された磁界の磁束は、第2の伸長部42の伸長側端面42Aから当該伸長側端面42Aに対して垂直な方向に進出し、または第2の伸長部42の伸長側端面42Aに当該伸長側端面42Aに対して垂直な方向に進入する。したがって、第1の伸長部41および第2の伸長部42のそれぞれの伸長側端面41A、42Aが磁性線材22の軸線Wに対して垂直である場合には、磁界形成部11により形成された磁界の磁束は、第1の伸長部41の伸長側端面41Aから磁性線材22の軸線方向に進出し、または第1の伸長部41の伸長側端面41Aに磁性線材22の軸線方向に進入する。同様に、磁界形成部11により形成された磁界の磁束は、第2の伸長部42の伸長側端面42Aから磁性線材22の軸線方向に進出し、または第2の伸長部42の伸長側端面42Aに磁性線材22の軸線方向に進入する。よって、磁界形成部11と磁界検出部21とが互いに対向したときに、第1の伸長部41から進出し、磁性線材22を軸線方向に通り、第2の伸長部42に進入する磁束の量を増やすことができ、かつ、第2の伸長部42から進出し、磁性線材22を軸線方向に通り、第1の伸長部41に進入する磁束の量を増やすことができる。
第1の磁性部材31は、平面K上において点P1、点P3および点P5を含むように拡がる板状に形成され、第2の磁性部材32は、平面K上において点P2、点P4および点P6を含むように拡がる板状に形成されている。この構成により、第1の磁性部材31により磁界検出部21の伸長方向一側(内周側)から伸長方向中央にかけての部分を下方から広く覆うことができ、また、第2の磁性部材32により磁界検出部21の伸長方向他側(外周側)から伸長方向中央にかけての部分を下方から広く覆うことができる。したがって、磁界形成部11と磁界検出部21とが上下方向において互いに対向したときに、磁界形成部11により形成される磁界の磁束を磁性線材22に集中させる効果を高めることができ、磁性線材22をその軸線方向に通る磁束の量を一層増やすことができる。
また、図9に示すように、第1の伸長部41および第2の伸長部42のそれぞれには立ち上がり部45が形成されている。これら立ち上がり部45は磁界検出部21の一部を側方から覆っている。この構成により、図10に示すように磁界形成部11と磁界検出部21とが上下方向において互いに対向したとき、磁界形成部11により形成された磁界の磁束が立ち上がり部45を介して磁性線材22に出入りするようになる。したがって、第1の伸長部41および第2の伸長部42から磁性線材22にそれぞれ出入りする磁束の経路を増やすことができ、磁性線材42を通る磁束を多くすることができる。
(第3の磁性部材の作用)
第3の磁性部材33の作用について図12および図13を用いて説明する。図12は、磁界形成部11が第3の磁性部材33の下方に位置している状態を示している。図13は、図12中の矢示XIII−XIII方向から見た磁界形成部11および第3の磁性部材33を模式的に示している。第3の磁性部材33は、第1の磁性部材31および第2の磁性部材32の双方の周方向一側に第1の磁性部材31および第2の磁性部材32の双方と隣接して配置されている。第3の磁性部材33がこのような位置に配置されているので、図12に示すように、磁界形成部11と磁界検出部21とが互いに接近しつつあるが、まだ対向していないときに、磁界形成部11の内周側磁石12および外周側磁石13が第3の磁性部材33の内周側端部と外周側端部とに上下方向において対向する。第3の磁性部材33は円Cと円Dとの間を径方向に伸長しているので、内周側磁石12および外周側磁石13が第3の磁性部材33の内周側端部と外周側端部とに上下方向において対向したとき、図13に示すように、第3の磁性部材33により、内周側磁石12と外周側磁石13との間を短絡するが如き磁気回路が形成される。これにより、磁界形成部11により形成される磁界の多くの磁束が第3の磁性部材33を通る。また、第3の磁性部材33は、第2の磁性部材32から分離しているので、第3の磁性部材33から第1の磁性部材31または第2の磁性部材32を介して磁性線材22へ向かう磁束は極少量である。このように、磁界形成部11と磁界検出部21とが互いに接近しつつあるが対向していないときに、磁界形成部11により形成される磁界の磁束を第3の磁性部材33に集中させることにより、第1の磁性部材31または第2の磁性部材32を介して磁性線材22へ導かれる磁束の量を減らすことができる。したがって、磁性線材22の磁化方向が反転するタイミングのばらつきを抑制することができ、磁界形成部11と磁界検出部21との接近を高精度に検出することができ、回転検出の精度を高めることができる。
第3の磁性部材33の作用について図12および図13を用いて説明する。図12は、磁界形成部11が第3の磁性部材33の下方に位置している状態を示している。図13は、図12中の矢示XIII−XIII方向から見た磁界形成部11および第3の磁性部材33を模式的に示している。第3の磁性部材33は、第1の磁性部材31および第2の磁性部材32の双方の周方向一側に第1の磁性部材31および第2の磁性部材32の双方と隣接して配置されている。第3の磁性部材33がこのような位置に配置されているので、図12に示すように、磁界形成部11と磁界検出部21とが互いに接近しつつあるが、まだ対向していないときに、磁界形成部11の内周側磁石12および外周側磁石13が第3の磁性部材33の内周側端部と外周側端部とに上下方向において対向する。第3の磁性部材33は円Cと円Dとの間を径方向に伸長しているので、内周側磁石12および外周側磁石13が第3の磁性部材33の内周側端部と外周側端部とに上下方向において対向したとき、図13に示すように、第3の磁性部材33により、内周側磁石12と外周側磁石13との間を短絡するが如き磁気回路が形成される。これにより、磁界形成部11により形成される磁界の多くの磁束が第3の磁性部材33を通る。また、第3の磁性部材33は、第2の磁性部材32から分離しているので、第3の磁性部材33から第1の磁性部材31または第2の磁性部材32を介して磁性線材22へ向かう磁束は極少量である。このように、磁界形成部11と磁界検出部21とが互いに接近しつつあるが対向していないときに、磁界形成部11により形成される磁界の磁束を第3の磁性部材33に集中させることにより、第1の磁性部材31または第2の磁性部材32を介して磁性線材22へ導かれる磁束の量を減らすことができる。したがって、磁性線材22の磁化方向が反転するタイミングのばらつきを抑制することができ、磁界形成部11と磁界検出部21との接近を高精度に検出することができ、回転検出の精度を高めることができる。
また、第3の磁性部材33の内周側端部は第1の磁性部材31に接続されているので、第1の磁性部材31と第3の磁性部材33とを一体化することができ、部品点数を減らすことができる。
(コギング抑制作用)
回転検出装置1におけるコギング抑制作用について、図5、図14および図15を用いて説明する。図14および図15は、磁界形成部11と、磁束制御部30を構成する磁性部材31、32、33との間の距離が小さくなった状態を示している。図5に示すように、各磁界形成部11において、外周側磁石13の周方向一側の端部13Aが、円Aの中心を通りかつ内周側磁石12の周方向一側の端部12Aに接する直線L1に接していない。また、各磁界形成部11において、外周側磁石13の周方向他側の端部13Bが、円Aの中心を通りかつ内周側磁石12の周方向他側の端部12Bに接する直線L2に接していない。これにより、被検出体の第1の部分51が回転したときに、内周側磁石12と外周側磁石13とが磁束制御部30を構成する磁性部材31、32、33の下方に同時に到達しない。また、内周側磁石12と外周側磁石13とが磁束制御部30を構成する磁性部材31、32、33の下方から同時に離脱しない。
回転検出装置1におけるコギング抑制作用について、図5、図14および図15を用いて説明する。図14および図15は、磁界形成部11と、磁束制御部30を構成する磁性部材31、32、33との間の距離が小さくなった状態を示している。図5に示すように、各磁界形成部11において、外周側磁石13の周方向一側の端部13Aが、円Aの中心を通りかつ内周側磁石12の周方向一側の端部12Aに接する直線L1に接していない。また、各磁界形成部11において、外周側磁石13の周方向他側の端部13Bが、円Aの中心を通りかつ内周側磁石12の周方向他側の端部12Bに接する直線L2に接していない。これにより、被検出体の第1の部分51が回転したときに、内周側磁石12と外周側磁石13とが磁束制御部30を構成する磁性部材31、32、33の下方に同時に到達しない。また、内周側磁石12と外周側磁石13とが磁束制御部30を構成する磁性部材31、32、33の下方から同時に離脱しない。
被検出体の第1の部分51の回転時に、図14に示すように、磁界形成部11と第3の磁性部材33との間の距離が小さくなり、内周側磁石12と第3の磁性部材33との間の距離、および外周側磁石13と第3の磁性部材33との間の距離がそれぞれ小さくなったとき、内周側磁石12と第3の磁性部材33との間の磁力により内周側磁石12が第3の磁性部材33に吸引され、かつ外周側磁石13と第3の磁性部材33との間の磁力により外周側磁石13が第3の磁性部材33に吸引される。第3の磁性部材33が内周側磁石12を吸引する力は、内周側磁石12と第3の磁性部材33との間の距離が小さくなるに従って大きくなる。また、第3の磁性部材33が外周側磁石13を吸引する力は、外周側磁石13と第3の磁性部材33との間の距離が小さくなるに従って大きくなる。仮に、内周側磁石12と外周側磁石13とが、第3の磁性部材33の下方に同時に到達し、または第3の磁性部材33の下方から同時に離脱したとすると、第3の磁性部材33が内周側磁石12を吸引する力と第3の磁性部材33が外周側磁石13を吸引する力とが合わさって、大きな吸引力が生ずる。それゆえ、被検出体の第1の部分51の回転に生じるコギングの程度が大きくなる。しかしながら、本発明の実施形態の回転検出装置1においては、被検出体の第1の部分51が回転したときに、内周側磁石12と外周側磁石13とが、第3の磁性部材33の下方に同時に到達せず、また、第3の磁性部材33の下方から同時に離脱しない。したがって、磁界形成部11と第3の磁性部材33との間の距離が小さくなることによって生ずる吸引力を小さくすることができ、よって、被検出体の第1の部分51の回転に生じるコギングの程度を小さくすることができる。
同様に、本発明の実施形態の回転検出装置1においては、被検出体の第1の部分51が回転したときに、図15に示すように、内周側磁石12と外周側磁石13とが第1の磁性部材31および第2の磁性部材32のそれぞれの下方に同時に到達せず、また、内周側磁石12と外周側磁石13とが第1の磁性部材31および第2の磁性部材32のそれぞれの下方から同時に離脱しない。したがって、磁界形成部11と、第1の磁性部材31および第2の磁性部材32との間の距離が小さくなることにより生ずる吸引力を小さくすることができ、よって、被検出体の第1の部分51の回転に生じるコギングの程度を小さくすることができる。
(回転検出装置の小型化)
また、3つの磁界検出部21は、基準軸Z上の点を中心とし、基準軸Zと直交する所定長の半径を有する円Bにおいて、中心角が180度以下の円弧上に配置されている。したがって、回転検出装置1を取り付ける被検出体の構成上の都合等により、例えば、磁界検出部21を配置し得る領域が、円板状の支持体の軸方向の端面の外周側の一部、またはリング状の支持体の軸方向の端面の一部に制限された場合でも、そのような制限された領域に3つの磁界検出部21を配置することができ、高精度な回転検出を行うことができる回転検出装置1を構築することができる。また、磁界検出部21を配置し得る領域として、円板状の支持体の軸方向の端面の全周、またはリング状の支持体の軸方向の端面の全周を確保することができる場合には、例えば、図16に示す回転検出装置61のように、磁界検出部21の個数を増加させることができる。
また、3つの磁界検出部21は、基準軸Z上の点を中心とし、基準軸Zと直交する所定長の半径を有する円Bにおいて、中心角が180度以下の円弧上に配置されている。したがって、回転検出装置1を取り付ける被検出体の構成上の都合等により、例えば、磁界検出部21を配置し得る領域が、円板状の支持体の軸方向の端面の外周側の一部、またはリング状の支持体の軸方向の端面の一部に制限された場合でも、そのような制限された領域に3つの磁界検出部21を配置することができ、高精度な回転検出を行うことができる回転検出装置1を構築することができる。また、磁界検出部21を配置し得る領域として、円板状の支持体の軸方向の端面の全周、またはリング状の支持体の軸方向の端面の全周を確保することができる場合には、例えば、図16に示す回転検出装置61のように、磁界検出部21の個数を増加させることができる。
また、各磁界検出部21は円Bの径方向および接線方向の双方に対して傾斜するように配置されているので、3つの磁界検出部21を、磁界検出部21の端部同士を接触させることなく詰めて並べることができる。したがって、3つの磁界検出部21を配置する領域が、半径が小さく、中心角が180度以下の円弧状の領域に制限された場合でも、3つの磁界検出部21を適切な間隔を開けて配置することができる。よって、小型の回転検出装置1を実現することができる。
また、本発明の実施形態の回転検出装置1によれば、モータにおいて、その出力軸と共に回転する部分に各磁界形成部11を取り付け、モータの筐体等、回転しない部分に各磁界検出部21および各磁束制御部30を取り付けることで、モータの出力軸の回転数を高精度にカウントすることができる。また、回転検出装置1と、モータの出力軸の回転角度を検出することができる角度センサ(例えば光学式の回転位置センサ)とをモータに取り付けることで、モータの出力軸の回転角度および回転数を検出することができるエンコーダを形成することができる。
なお、磁束制御部30の磁性部材は実施形態のものに限定されない。例えば、図17(1)に示す磁束制御部75のように、第3の磁性部材78が、外周側に配置された第2の磁性部材77に接続され、内周側に配置された第1の磁性部材76から分離しているものでもよい。また、図17(2)に示す磁束制御部80のように、第3の磁性部材83が第1の磁性部材81および第2の磁性部材82の双方から分離しているものでもよい。また、図17(3)に示す磁束制御部85のように、一対の第3の磁性部材88が第1の磁性部材86および第2の磁性部材87の周方向両側に設けられたものでもよい。
また、上記実施形態では、各磁界形成部11において、外周側磁石13の周方向一側の端部13Aが、円Aの中心を通りかつ内周側磁石12の周方向一側の端部12Aに接する直線L1に接しておらず、かつ、外周側磁石13の周方向他側の端部13Bが、円Aの中心を通りかつ内周側磁石12の周方向他側の端部12Bに接する直線L2に接していない構成としたが、本発明はこれに限らない。例えば、図18に示すように、各磁界形成部91において、外周側磁石93の周方向一側の端部93A、および内周側磁石92の周方向一側の端部92Aが円Aの中心を通る直線L1にそれぞれ接し、外周側磁石93の周方向他側の端部93B、および内周側磁石92の周方向他側の端部92Bが円Aの中心を通る直線L2にそれぞれ接する構成とし、各磁束制御部100において、第3の磁性部材103の外周端側の周方向一側の端部103Aが、円Aの中心を通りかつ第3の磁性部材103の内周端側の周方向一側の端部103Bに接する直線L5に接せず、また、第2の磁性部材102の周方向他側の端部102Aが、円Aの中心を通りかつ第1の磁性部材101の周方向他側の端部101Aに接する直線L6に接しない構成としてもよい。このような構成でも、被検出体の第1の部分51の回転時に、各磁界形成部91における内周側磁石92および外周側磁石93が、磁束制御部100を構成する磁性部材101、102、103の下方に同時に到達すること、または磁束制御部100を構成する磁性部材101、102、103の下方から同時に離脱することを防止することができ、第1の部分51の回転に生ずるコギングを小さくすることができる。
また、上記実施形態において、第1の磁性部材31は点P1および点P3を通る円Cの円弧に沿って伸長しているが、第1の磁性部材31の形状を、点P1および点P3を通って直線状に伸長する形状としてもよい。また、第1の磁性部材31の形状を、点P1と、円C上における点P1と点P3との中間の点と、点P3とを通るくの字型の形状としてもよい。また、第1の磁性部材31の形状を、点P1と、点P1から点P3までの円Cの円弧上に位置する2つ以上の点と、点P3とを順次直線で結んだ形状(多角形の周の一部の形状)としてもよい。また、上記実施形態において、第2の磁性部材32は点P2および点P4を通る円Dの円弧に沿って伸長しているが、第2の磁性部材32の形状も上述したような直線状、くの字型、または多角形の周の一部の形状としてもよい。
また、上記実施形態では、各磁界形成部11において、支持板14上に内周側磁石12および外周側磁石13を設けたが、これに代え、1本の棒状の磁石をその伸長方向が円Aの径方向となるように支持板14上に設けてもよい。また、各磁界検出部21の磁性線材22は、実施形態に記載した磁性線材に限定されず、大バルクハウゼン効果を生ずる他の磁性線材を用いることができる。例えば、磁性線材において、その中心側部分よりも外周側部分の方が保磁力が大きい、大バルクハウゼン効果を生ずる磁性線材を用いてもよい。また、磁界形成部11の配置間隔は90度に限定されない。また、磁界検出部21の配置間隔は60度に限定されない。また、磁界形成部11の個数は5つ以上でもよく、磁界検出部21の個数は4つ以上でもよい。
また、上記実施形態では、第1の部分51が第2の部分52に対して回転する被検出体において、各磁界形成部11を第1の部分51に設け、各磁界検出部21および各磁束制御部30を第2の部分52に設け、各磁界形成部11が各磁界検出部21および各磁束制御部30に対して回転する場合を例にあげたが、本発明はこれに限らない。第2の部分52が第1の部分51に対して回転する被検出体において、各磁界形成部11を第1の部分51に設け、各磁界検出部21および各磁束制御部30を第2の部分52に設け、各磁界検出部21および各磁束制御部30が各磁界形成部11に対して回転するようにしてもよい。
また、本発明は、請求の範囲および明細書全体から読み取ることのできる発明の要旨または思想に反しない範囲で適宜変更可能であり、そのような変更を伴う回転検出装置もまた本発明の技術思想に含まれる。
1、61 回転検出装置
11、91 磁界形成部
12、92 内周側磁石
12A、12B 端面
13、93 外周側磁石
13A、13B 端面
21 磁界検出部
22 磁性線材
23 コイル
30、70、75、80、85、100 磁束制御部
31、71、76、81、86、101 第1の磁性部材
32、72、77、82、87、102 第2の磁性部材
33、78、83、88、103 第3の磁性部材
41 第1の伸長部
41A 伸長側端面
42 第2の伸長部
42A 伸長側端面
51 第1の部分
52 第2の部分
11、91 磁界形成部
12、92 内周側磁石
12A、12B 端面
13、93 外周側磁石
13A、13B 端面
21 磁界検出部
22 磁性線材
23 コイル
30、70、75、80、85、100 磁束制御部
31、71、76、81、86、101 第1の磁性部材
32、72、77、82、87、102 第2の磁性部材
33、78、83、88、103 第3の磁性部材
41 第1の伸長部
41A 伸長側端面
42 第2の伸長部
42A 伸長側端面
51 第1の部分
52 第2の部分
Claims (4)
- いずれか一方が他方に対して基準軸を回転軸として回転する第1の部分および第2の部分を有する被検出体に設けられる回転検出装置であって、
前記被検出体の前記第1の部分に設けられ、磁界を形成する少なくとも4つの磁界形成部と、
前記被検出体の前記第2の部分に設けられ、磁界を検出する少なくとも3つの磁界検出部と、
前記被検出体の前記第2の部分に設けられ、前記各磁界形成部が形成する磁界における磁束の方向を制御する少なくとも3つの磁束制御部とを備え、
前記少なくとも4つの磁界形成部は、前記基準軸の軸方向一側の領域に、前記基準軸上の点を中心とし前記基準軸と直交する所定長の半径を有する円Aに沿って間隔を置いて配置され、
前記各磁界形成部において、前記磁界を形成する相反する2つの磁極は前記円Aの径方向に並び、
前記少なくとも3つの磁界検出部は、前記基準軸の軸方向他側に位置する領域に、前記基準軸上の点を中心とし、前記基準軸と直交する前記所定長の半径を有する円Bにおいて中心角が180度以下の円弧上に間隔をおいて配置され、
前記各磁界検出部は、磁性線材および前記磁性線材の周囲に設けられたコイルを有し、前記磁性線材の軸線が前記円Bを含む平面上を伸長しかつ前記円Bの径方向および接線方向の双方に対して傾斜するように配置され、
前記少なくとも3つの磁束制御部は、前記基準軸の軸方向一側の領域と前記基準軸の軸方向他側の領域との間において前記少なくとも3つの磁界検出部とそれぞれ対応する位置に配置され、
前記各磁束制御部は、対応する前記磁界検出部の一部を覆う磁性部材を有し、前記磁界形成部により形成される磁界の磁束が、対応する前記磁界検出部の前記磁性線材をその軸線方向に通るように、当該磁束の方向を変化させることを特徴とする回転検出装置。 - 前記各磁界形成部は2つの磁石を有し、前記2つの磁石は、前記基準軸の軸方向他側を向いた端部の磁極が互いに異なるように前記円Aの径方向に並んで配置されていることを特徴とする請求項1に記載の回転検出装置。
- 前記磁性線材は大バルクハウゼン効果を生ずる磁性線材であることを特徴とする請求項1または2に記載の回転検出装置。
- 前記磁性部材は軟質磁性材料により形成されていることを特徴とする請求項1ないし3のいずれかに記載の回転検出装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018094070A JP2019200101A (ja) | 2018-05-15 | 2018-05-15 | 回転検出装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018094070A JP2019200101A (ja) | 2018-05-15 | 2018-05-15 | 回転検出装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2019200101A true JP2019200101A (ja) | 2019-11-21 |
Family
ID=68612041
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018094070A Pending JP2019200101A (ja) | 2018-05-15 | 2018-05-15 | 回転検出装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2019200101A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021117120A (ja) * | 2020-01-27 | 2021-08-10 | ヒロセ電機株式会社 | 回転検出装置 |
-
2018
- 2018-05-15 JP JP2018094070A patent/JP2019200101A/ja active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021117120A (ja) * | 2020-01-27 | 2021-08-10 | ヒロセ電機株式会社 | 回転検出装置 |
| JP7428524B2 (ja) | 2020-01-27 | 2024-02-06 | ヒロセ電機株式会社 | 回転検出装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5895774B2 (ja) | モータ | |
| JP5880577B2 (ja) | モータ、モータシステムおよびモータ用エンコーダ | |
| JP5889144B2 (ja) | 回転検出装置 | |
| JP6020184B2 (ja) | モータ | |
| JP6535270B2 (ja) | 回転検出装置 | |
| JP6017323B2 (ja) | 回転検出装置 | |
| JP5306384B2 (ja) | モータ | |
| JP5886269B2 (ja) | 回転検出装置およびモータ | |
| JP7068749B2 (ja) | 回転検出装置 | |
| JP2019200100A (ja) | 回転検出装置 | |
| JP6235927B2 (ja) | 角加速度検出器 | |
| JP2007225536A (ja) | 回転運動検出装置 | |
| JP2019200101A (ja) | 回転検出装置 | |
| JP2019200099A (ja) | 回転検出装置 | |
| JP6976287B2 (ja) | 回転検出装置 | |
| JP5964117B2 (ja) | 回転検出装置 | |
| JP7469241B2 (ja) | 回転検出装置 | |
| JP7453166B2 (ja) | 回転検出装置 | |
| JP6208562B2 (ja) | 磁石、測定方法及び着磁装置 | |
| JP2005121501A (ja) | タンデム型回転検出装置 | |
| JP7428524B2 (ja) | 回転検出装置 | |
| JP2003161643A5 (ja) | ||
| JP6728122B2 (ja) | アクチュエータ、及びそれを備えたレンズユニット、カメラ | |
| JP2015095642A5 (ja) | ||
| CN114270059A (zh) | 具有环形设计的磁性轴承装置 |