JP5801553B2 - 画像形成装置及びその制御方法 - Google Patents
画像形成装置及びその制御方法 Download PDFInfo
- Publication number
- JP5801553B2 JP5801553B2 JP2010278393A JP2010278393A JP5801553B2 JP 5801553 B2 JP5801553 B2 JP 5801553B2 JP 2010278393 A JP2010278393 A JP 2010278393A JP 2010278393 A JP2010278393 A JP 2010278393A JP 5801553 B2 JP5801553 B2 JP 5801553B2
- Authority
- JP
- Japan
- Prior art keywords
- image forming
- pattern
- color
- endless belt
- detection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




















Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G15/00—Apparatus for electrographic processes using a charge pattern
- G03G15/50—Machine control of apparatus for electrographic processes using a charge pattern, e.g. regulating differents parts of the machine, multimode copiers, microprocessor control
- G03G15/5054—Machine control of apparatus for electrographic processes using a charge pattern, e.g. regulating differents parts of the machine, multimode copiers, microprocessor control by measuring the characteristics of an intermediate image carrying member or the characteristics of an image on an intermediate image carrying member, e.g. intermediate transfer belt or drum, conveyor belt
- G03G15/5058—Machine control of apparatus for electrographic processes using a charge pattern, e.g. regulating differents parts of the machine, multimode copiers, microprocessor control by measuring the characteristics of an intermediate image carrying member or the characteristics of an image on an intermediate image carrying member, e.g. intermediate transfer belt or drum, conveyor belt using a test patch
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G15/00—Apparatus for electrographic processes using a charge pattern
- G03G15/01—Apparatus for electrographic processes using a charge pattern for producing multicoloured copies
- G03G15/0142—Structure of complete machines
- G03G15/0178—Structure of complete machines using more than one reusable electrographic recording member, e.g. one for every monocolour image
- G03G15/0194—Structure of complete machines using more than one reusable electrographic recording member, e.g. one for every monocolour image primary transfer to the final recording medium
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G15/00—Apparatus for electrographic processes using a charge pattern
- G03G15/50—Machine control of apparatus for electrographic processes using a charge pattern, e.g. regulating differents parts of the machine, multimode copiers, microprocessor control
- G03G15/5054—Machine control of apparatus for electrographic processes using a charge pattern, e.g. regulating differents parts of the machine, multimode copiers, microprocessor control by measuring the characteristics of an intermediate image carrying member or the characteristics of an image on an intermediate image carrying member, e.g. intermediate transfer belt or drum, conveyor belt
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G15/00—Apparatus for electrographic processes using a charge pattern
- G03G15/01—Apparatus for electrographic processes using a charge pattern for producing multicoloured copies
- G03G15/0142—Structure of complete machines
- G03G15/0178—Structure of complete machines using more than one reusable electrographic recording member, e.g. one for every monocolour image
- G03G15/0189—Structure of complete machines using more than one reusable electrographic recording member, e.g. one for every monocolour image primary transfer to an intermediate transfer belt
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G2215/00—Apparatus for electrophotographic processes
- G03G2215/01—Apparatus for electrophotographic processes for producing multicoloured copies
- G03G2215/0151—Apparatus for electrophotographic processes for producing multicoloured copies characterised by the technical problem
- G03G2215/0158—Colour registration
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Color Electrophotography (AREA)
- Control Or Security For Electrophotography (AREA)
Description
以下では、本発明における第1の実施形態について説明する。本実施形態では、本発明に係る画像形成装置の一例として、電子写真方式のカラー画像形成装置(印刷装置)に本発明を適用した場合について説明する。
図1に概略的に示すカラーの画像形成装置は、シアン色(C)、マゼンタ色(M)、イエロー色(Y)、ブラック色(K)の4色にそれぞれ対応する複数の画像形成部を備える。各画像形成部はそれぞれ、感光ドラム1a,1b,1c,1dと、入力された画像信号に応じて感光ドラム1a,1b,1c,1dを露光して、感光ドラム1a,1b,1c,1dの表面に静電潜像を形成するレーザスキャナ2a,2b,2c,2dとを備える。画像形成装置は、さらに、用紙カセット(図示せず)から供給された用紙を各画像形成部へ搬送する無端状ベルトである搬送ベルト3を備える。搬送ベルト3は、矢印11の方向に回転する駆動ローラ4によって駆動されることによって矢印12の方向に移動しながら、用紙を搬送する。従動ローラ5は、搬送ベルト3の移動に伴って回転するとともに、搬送ベルト3に対して一定の張力を与える。ここで、複数の画像形成部は、搬送ベルト3の周面の移動方向に沿って相互に異なる位置に設けられている。また、搬送ベルト3の上方には、搬送ベルト3上に形成される色ずれ検出用のパターン画像を検出する一対のレジ検出センサ6L,6Rが配置される。レジ検出センサ6L,6Rは、搬送ベルト3上においてその搬送(移動)方向に対して直交する方向に並べて配置される。
図1に示したレジ検出センサ6L,6Rは、図2(a)に示す構成を有する。なお、レジ検出センサ6L,6Rは同様の構成を有するため、図2(a)ではレジ検出センサの添え字L及びRを省略している。レジ検出センサ6は、搬送ベルト3に光を照射するLED61と、搬送ベルト3からの反射光を検出するフォトトランジスタ(PTR)62とを備える。LED61は、搬送ベルト3上の検出面の法線方向に対して所定の角度Aで当該検出面に光を照射するように、ライトガイド等を用いて配置されている。また、図2(a)に示すように、LED61及びPTR62は、光学的に対称となるように配置されている。LED61から出射された光は、搬送ベルト3の表面で正反射され、PTR62において受光される。なお、本実施形態では、搬送ベルト3からの正反射光を検出するセンサをPTR62として設けているが、搬送ベルト3からの乱反射光を検出するフォトトランジスタをさらに設けてもよい。
図3は、画像形成装置において形成される画像に生じ得る色ずれの一例を示す図であり、1ライン(主走査線)の画像を用紙に形成した場合の当該用紙上における画像位置を示している。同図において、401及び404は、副走査方向に色ずれが生じている場合を、402及び403は、主走査方向に色ずれが生じている場合を示す。また、401〜404において、aは、色ずれが生じていない場合の理想的な画像位置を、bは、aに示す画像に対して色ずれが生じた場合の画像位置をそれぞれ示す。ただし、402及び403については、副走査方向に色ずれは生じていないが、説明のためにa及びbのラインを副走査方向に離して描いてある。なお、図3に示す矢印は、発生している色ずれについて適用すべき補正の様子を示す。
次に、レジ検出センサ6L,6Rを用いて上述の色ずれを検出する方法について説明する。図4は、搬送ベルト3上に形成される色ずれ検出用パターン画像(以下では、「検出用パターン」又は「パターン」と称する。)の一例を示す。図4では、検出用パターンの一例として、搬送ベルト3の搬送(移動)方向500に直交する方向に描かれた線状のパターン501a〜d、502a〜dを示している。添え字a〜dを付した各パターンは、C、M、Y、Kのトナーをそれぞれ用いて搬送ベルト3上に形成されたパターンである。各パターンは、511及び512で示すライン上で、レジ検出センサ6L,6Rによってそれぞれ検出される。また、tLa〜d、tRa〜dは、レジ検出センサ6L,6Rによる、パターン501a〜d、502a〜dの検出タイミングをそれぞれ表す。
ΔyLC=V*(tLa−tLd)−dCK (1)
ΔyLM=V*(tLb−tLd)−dMK (2)
ΔyLY=V*(tLc−tLd)−dYK (3)
ΔyRC=V*(tRa−tRd)−dCK (4)
ΔyRM=V*(tRb−tRd)−dMK (5)
ΔyRY=V*(tRc−tRd)−dYK (6)
となる。ここで、式(1)〜(6)の計算結果の値の正負に基づいて、副走査方向に対して前方又は後方の何れにパターンの形成位置がずれているのかを判定できる。また、これらの計算結果に基づいて、(ΔyL+ΔyR)/2から副走査方向の書出し位置を、(ΔyR−ΔyL)から走査線の傾きを補正する。
次に、図5を参照して、本実施形態に係る画像形成装置における色ずれ補正に関連する制御ブロックの構成について説明する。CPU(主制御部)611は、エンジン制御部610内の各ブロックの動作のタイミングを、バスを介して制御するとともに、ブロック間の通信やエンジン制御部610とコントローラ600との間の通信を制御する。電源投入時等のタイミングにおいて色ずれ補正が開始されると、まず、検出用パターン生成部612によって、後述する検出用パターンの画像信号が生成される。検出用パターン生成部612によって生成された検出用パターンは、画像生成部613においてC,M,Y,Kの各色の画像信号に変換されて、レーザスキャナ2a,2b,2c,2dへそれぞれ出力される。レーザスキャナ2a,2b,2c,2dは、上述の画像形成処理によって、搬送ベルト3上に検出用パターンを形成する。
次に、図6(a)を参照して、副走査方向の傾きの補正について説明する。同図に示すように、傾き補正レンズ14は、その一端が、モータ16の軸に取り付けられたカム15によって支持されている。モータ16の回転動作によってカム15が回転すると、傾き補正レンズ14の一端の位置が変化して、ポリゴンミラー13によって偏向されるレーザ光の感光ドラム1への入射位置が変化する。傾き制御部615は、算出された色ずれ値に応じてモータ16を動作させることで、副走査方向の傾きを補正する。その際、傾き補正レンズ14は、一端を基準として他端へ移動する。これにより、画像上では、例えば一端が固定された状態で他端のみが主走査方向に移動するため、副走査方向の書き出し位置も同時に変化する。従って、傾き補正による傾き補正レンズ14の動作量に応じて、副走査方向の書き出し位置も補正される。
次に、副走査方向の書き出し位置の補正について説明する。ポリゴンモータ制御部614は、算出された色ずれ値から得られる、副走査方向の書き出し位置の補正値に基づいて、副走査方向の書き出し位置を以下のように補正する。ここでは、一例として、算出された色ずれ値が、基準色についての書き出し位置に対して2ライン、又は1/4ラインの誤差がある場合の補正について説明する。なお、上述のように副走査方向の傾きの補正が行われている場合には、当該傾きの補正に依存した書き出し位置の変化量も考慮した補正量で、副走査方向の書き出し位置を補正する。
次に、図7(a)を参照して、主走査幅(全体倍率)の補正について説明する。ビデオクロック生成部601は、いわゆるPLL回路で構成される。図7(a)に示すビデオクロック生成部601において、水晶発振器(X’tal)から出力されるクロック信号は、1/NR分周器において分周された後、位相比較器に入力される。また、ビデオクロック生成部601の出力である周波数fVのビデオクロック信号も、1/NF分周器において分周された後、位相比較器に入力される。位相比較器は、1/NR分周器の出力と1/NF分周器の出力との位相差に応じた、極性及び幅の異なるパルスを、ローパスフィルタへ出力する。ローパスフィルタは、位相比較器から入力された信号を平滑化して、電圧制御発信器(VCO)へ出力する。VCOは、ローパスフィルタからの入力電圧に応じた周波数のビデオクロック信号を出力する。
fV=(NR/NF)*fX
と表現される。ここで、1/NR分周器及び1/NF分周器に関連するNR及びNFは、整数である。上式より、NR及びNFを調整することによって、ビデオクロック周波数fVを調整できることがわかる。そこで、本実施形態において、コントローラ600は、レジ検出センサ制御部301において算出された色ずれ値に応じて、これらNR及びNFの設定値を変更することによって、主走査幅を補正する。例えば、コントローラ600は、色ずれ量の検出の結果、主走査幅が狭い方向にずれている場合、当該主走査幅を長くするために、NRとNFとの比が小さくなるようにNR及びNFの設定値を補正することでビデオクロック周波数fVを低く(周期を長く)する。
次に、主走査方向の書き出し位置の補正について説明する。ここでは、一例として、算出された色ずれ値が、基準色についての書き出し位置に対して2ドット、又は1/4ドットの誤差がある場合の補正について説明する。なお、上述のように主走査幅の補正が行われている場合には、当該主走査幅の補正に依存した書き出し位置の変化量も考慮した補正量で、主走査方向の書き出し位置を補正する。
次に、図8のフローチャートを参照して、本実施形態に係る画像形成装置において実行される色ずれ補正動作の手順について説明する。S101で、CPU611は、検出用パターン生成部612を制御して、後述するように、適切なパターン間隔に設定された検出用パターンの画像を生成する。かかる検出用パターンは、検出用パターン生成部612内部に備えられた不揮発性メモリであるEEPROMに予め格納されていればよい。EEPROMに格納された検出用パターンの画像データは、ビットマップ形式のデータであってもよいし、データ容量の少ないベクトル形式のデータであってもよい。検出用パターン生成部612においてEEPROMから読み出された画像データは、画像生成部613に送られるとともに、そこで各色の画像信号に展開された後、レーザスキャナ2a,2b,2c,2dへそれぞれ出力される。その後、CPU611は、処理をS102へ移行する。
次に、再び図4を参照して、本実施形態で使用する色ずれ検出用パターンについて説明する。図4に示すように、各色に対応する検出用パターンの並び順は、搬送ベルト3の移動方向に対して、前方からK(502d)、Y(502c)、M(502b)、C(502a)である。なお、521〜523、531〜533は、各色のパターン間の間隔(距離)である。
次に、本実施形態に係る、搬送ベルト3の速度ムラに起因した色ずれ検出誤差を低減するためのパターン間隔を算出する方法について説明する。以下ではまず、検出用パターンの転写時及び検出時における搬送ベルト3の速度変動によって生じる検出誤差を見積もるための式について説明する。
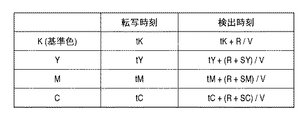
図9に示すように、搬送ベルト3による搬送路上における基準色Kの転写位置と、Y、M、Cの転写位置との間の距離を、それぞれSY、SM、SCとする。隣接する転写位置間の距離については、駆動ローラ4の偏心等の駆動系の要因によって発生する、搬送ベルト3の周面の移動速度の変動に起因した、色ずれの検出誤差を低減するために、通常、駆動ローラ4の外周長Tと一致させる。本実施形態においても、これと同様、SY=T、SM=2T、SC=3Tとする。なお、Tは、例えば75[mm]である。また、図9に示すRは、搬送ベルト3による搬送路上で、基準色Kの検出用パターンの転写位置と、レジ検出センサ6によって当該検出用パターンが読み取られて検出される検出位置との間の距離を表す。なお、Rは例えば210[mm]である。
図10には、各色の検出用パターンの、搬送ベルト3上への転写タイミングをtK、tY、tM、tCとした場合における、レジ検出センサによる各パターンの検出タイミングを示している。これらの検出タイミングは、各色についての転写位置とレジ検出センサ6との間の距離、及び搬送ベルト3の周面の移動速度Vに基づいて、得ることができよう。
図11は、搬送ベルト3に、各色のパターンを同時に転写した場合の転写パターン1401と、基準色K以外のY、M、Cのパターンを、搬送ベルト3の移動方向に対して前方に所定の距離だけオフセットを与えて転写した転写パターン1402とを示す。なお、搬送ベルト3による搬送路上において隣接した転写位置の間隔を、等間隔Sとし、感光ドラム1dからの転写位置とレジ検出センサ6による検出位置との間の距離をRとしている。ここで、転写パターン1402は、同時転写の転写パターン1401におけるY、M、Cのパターンに対して、副走査方向とは逆の方向(即ち、搬送ベルト3の移動方向)にそれぞれδY、δM、δCの距離だけオフセットさせたものである。本実施形態では、図11に示すように、各色の検出用パターン間の間隔を、搬送ベルト3の速度ムラによる位置ずれの検出誤差を低減可能な距離に設定する。また、搬送ベルト3に転写される各色のパターンの間隔が、当該設定した距離となるようなタイミングに、感光ドラム1a〜1dから搬送ベルト3へ各色のパターンをそれぞれ転写する。
図12は、各色のパターン間が図11に示す距離となるように搬送ベルト3へ各パターンを転写する場合の、各転写タイミングを示している。ここで、すべての色の検出用パターンを同時に転写する場合の転写タイミングを、基準色Kの転写タイミングtKとする。この場合、同時転写の場合のY、M、Cの検出用パターンの転写位置に対して、図11に示すδY、δM、δCのオフセットを与えるためには、各色の転写タイミングtY、tM、tCを、以下のようにtKより早める必要がある。
tY=tK−δY/V (7)
tM=tK−δM/V (8)
tC=tK−δC/V (9)
これらの式に示すように、各色のパターンの転写タイミングを、基準色Kの転写タイミングtKに対して、それぞれδY/V、δM/V、δC/Vだけ早めることによって、図11に示す転写パターン1402を実現できる。
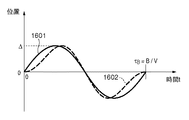
図13は、搬送ベルト3の回転周期と等しい特定周期で生じる移動速度の変動によって発生する、搬送ベルト3上にパターンが本来形成される位置からの変化(位置ずれ)を示す。ここで、搬送ベルト3の膜厚ムラ等に起因して生じる搬送ベルト3の周面の移動速度の変動は、波形1601のようにsin波で近似できるものとしている。このような搬送ベルト3の速度変動は、検出用パターンの転写位置と当該パターンの検出位置とにおいて、同一のタイミングにおいて同一の大きさで発生するものとする。なお、搬送ベルト3の外周長Bは、例えば850[mm]であり、回転周期τB=B/V[sec]と表すことができる。
図14は、検出用パターンの転写時及び検出時における、搬送ベルト3の速度変動による位置の変化について示している。同図の1700に示すように、検出用パターンの転写時において、搬送ベルト3の周面の移動速度にΔVの変動が発生した場合には、変動がない場合の理想位置1701に対して、搬送ベルト3上でΔだけずれた位置1702にパターンが転写される。なお、Δは、搬送ベルト3の速度変動ΔVによって発生する位置の変化の絶対値を表す。ここで、搬送ベルト3の移動方向に対して正の速度変動(+ΔV)が生じた場合、検出用パターンの転写位置は、当該移動方向に対して、理想位置1701より後方にずれる(−Δ)。
ΔT(t)=−Δsin(2πt/τB) (10)
ΔS(t)= Δsin(2πt/τB) (11)
本実施形態では、搬送ベルト3の周面の移動速度がある特定周期で変動する場合に生じる、搬送ベルト3上におけるパターンの転写位置の変化量と検出位置の変化量とを合計した合計変化量を基準として、色ずれの検出誤差を低減する。なお、本実施形態において特定周期は、搬送ベルト3の回転周期と同一の周期である。まず、基準色Kと、当該基準色以外のY、M、Cとの間における色ずれの検出誤差ΔYK、ΔMK、ΔCKは、基準色Kの転写時刻tKを基準として次式のように表すことができる。
ΔYK(tK,δY)={ΔT(tK−δY/V)+ΔS(tK−δY/V+(R+SY)/V)}
−{ΔT(tK)+ΔS(tK+R/V)} (12)
ΔMK(tK,δM)={ΔT(tK−δM/V)+ΔS(tK−δM/V+(R+SM)/V)}
−{ΔT(tK)+ΔS(tK+R/V)} (13)
ΔCK(tK,δC)={ΔT(tK−δC/V)+ΔS(tK−δC/V+(R+SC)/V)}
−{ΔT(tK)+ΔS(tK+R/V)} (14)
ここで、これらの式において、右辺の第3項及び第4項は、搬送ベルト3上における、基準色Kについてのパターンの転写位置及び検出位置の理想位置からの変化量の合計変化量を表す。一方、右辺の第1項及び第2項は、搬送ベルト3上における、基準色以外Y、M、Cについてのパターンの転写位置及び検出位置の理想位置からの変化量の合計変化量を表す。式(12)〜(14)の各々において、これらの変化量の差分をΔYK、ΔMK、ΔCKとして算出しており、これは色ずれの検出誤差に対応する。式(12)〜(14)に示すように、色ずれの検出誤差ΔYK、ΔMK、ΔCKは、基準色Kの転写時刻tKと、各パターンのオフセット値δY、δM、δCとの関数として表すことができる。このように、色ずれの検出誤差は、tKによって変化する。このことは、色ずれの検出誤差が、各パターンの転写タイミング及び検出タイミングによって定まる、搬送ベルト3の速度変動の位相関係に依存して変化することを意味している。従って、各パターンの転写タイミング及び検出タイミングを変化させて、当該速度変動の位相関係を適切に調整することによって、色ずれの検出誤差を低減することができる。具体的には、本実施形態では、転写タイミング及び検出タイミングにおける搬送ベルト3の速度変動の位相関係が、色ずれの検出誤差を低減する位相関係となるように、搬送ベルト3上に形成すべき各色の検出用パターンの間隔(第1の間隔)を決定する。
次に、搬送ベルト3上に形成する各色の検出用パターンの最適な間隔(第1の間隔)について説明する。この最適なパターン間隔を求めるためには、色ずれの検出誤差が最も大きくなる場合における位相関係に基づいて、当該誤差を見積もる必要がある。即ち、基準色Kの転写タイミングtKを、搬送ベルト3の周期τBにわたる範囲0≦tK<τBにおいて変化させた場合に、色ずれの検出誤差が最大となる値を基準として検討する必要がある。従って、各色の最大検出誤差をΔmaxYK、ΔmaxMK、ΔmaxCKとすると、
ΔmaxYK=max(|ΔYK(tK)|0≦tK<τB) (15)
ΔmaxMK=max(|ΔMK(tK)|0≦tK<τB) (16)
ΔmaxCK=max(|ΔCK(tK)|0≦tK<τB) (17)
と表すことができる。これらの式に基づいて、以下では、検出用パターンの転写時及び検出時における搬送ベルト3の周面の移動速度の変動による色ずれ検出誤差を低減するのに適したパターン間隔について検討する。
次に、式(15)〜(17)に基づいて適切なパターン間隔を求める。図15の1800aは、上述のオフセット値(δY、δM、δC)を変化させた場合の最大検出誤差ΔmaxYK、ΔmaxMK、ΔmaxCKの計算結果を示している。なお、1801〜1803は、それぞれΔmaxYK、ΔmaxMK、ΔmaxCKを表し、オフセット値(δY、δM、δC)が0[mm]の場合の検出誤差は、各色の検出用パターンを同時に搬送ベルト3へ同時に転写した場合の検出誤差に相当する。同図に示すように、各色の検出用パターンを同時に転写した場合には、検出誤差を最小化することはできず、かかる場合よりも検出誤差が低減可能なオフセット値が存在することがわかる。また、最大検出誤差ΔmaxYK、ΔmaxMK、ΔmaxCKが最小となるオフセット値は、Y、M、Cの各色について、δY=SY/2、δM=SM/2、δC=SC/2であることがわかる。即ち、色ずれの検出誤差を低減することができる最適なオフセット値は、基準色Kの転写位置と、Y、M、Cの転写位置との間の間隔SY、SM、SCを1/2した値であることが、式(15)〜(17)を用いた計算によって明らかとなった。
次に、図15の1800cは、搬送ベルト3上で、基準色Kのパターンの転写位置と、レジ検出センサ6によって当該パターンが検出される検出位置との間の距離Rを変化させた場合の、最大検出誤差ΔmaxYKの計算結果を示している。なお、1811〜1813、それぞれR=170[mm]、R=250[mm]、R=350[mm]の場合のΔmaxYKの計算結果である。同図に示すように、Rに依存して最大検出誤差の最小値は変化するものの、当該最小値が得られるオフセット値δYは、何れのRに対してもSY/2で同一であることがわかる。従って、最適なパターン間隔は、距離Rに依存しないことがわかる。
本実施形態では、図8のS102において、CPU611は、図4に示したパターン間隔を521及び531、522及び532、523及び533を、それぞれSY/2、SM/2、SC/2として、搬送ベルト3上に各色の検出用パターンを形成する。その後、CPU611は、S103において搬送ベルト3上のパターンを検出した結果に基づいて、S104で、色ずれ値を色ごとに算出する。さらに、S105で、CPU611は、当該算出結果に基づいて色ずれ補正を実行する。
以下では、本実施形態の有効な範囲といくつかの変形例について説明する。図15の1800bは、図15の1800aに含まれる1801を、δY=0〜120[mm]について拡大して表示したものである。図15の1800cにおいて、Pは、最大検出誤差ΔmaxYKが最小値となる最適なオフセット値SY/2についての、オフセット値δY=0(同時転写)からのΔmaxYKの改善量を表す。ここで、改善量Pに対して10%の範囲をΔmaxYKの許容範囲とする。これは、同時検出の場合と比較した最大検出誤差ΔmaxYKの改善量が、改善量Pの10%の範囲内であれば、同時転写の場合に対して十分に位置ずれの検出誤差が低減されると考えられるためである。本実施形態では、1800cに示すように、当該許容範囲内となるオフセット値δYは、最適なオフセット値δY=SY/2に対して±28%であることがわかる。即ち、(SY/2)×72%≦δY≦(SY/2)×128%の範囲であれば、δYは許容範囲内であるといえる。なお、上記の最大の改善量の10%の範囲内に対応するオフセット値の範囲は、搬送ベルト3の外周長B、距離R、各色のパターンの転写位置間の距離SY、SM、SCに依存して変化することが明らかとなっている。
本実施形態では、搬送ベルト3の周面の移動速度の速度ムラの原因として、搬送ベルト3の膜厚ムラ等によって搬送ベルト3の回転周期と同一の、比較的長周期の特定周期で生じる速度ムラを想定している。また、当該特定周期の速度ムラを、図13の波形1601に示すsin波によるプロファイルで近似して、適切なパターン間距離を求めている。しかしながら、当該速度ムラの近似は、sin波に限らず、例えば波形1602のように、sin波を歪ませたプロファイルであってもよい。本実施形態の変形例としてかかるプロファイルを使用した場合にも、色ずれの検出誤差を低減することは可能である。
また、本実施形態では、レジ検出センサ6R,6Lで得られた検出結果に基づいて、副走査方向の色ずれを補正する動作について主として説明してきた。しかしながら、本実施形態で説明した検出用パターンによれば、色ずれの検出精度を高めることが可能であることによって、主走査方向の色ずれ補正についてもその補正精度を向上させることが可能である。
第1の実施形態では、搬送ベルト3に関連する長周期の速度ムラによって生じる色ずれの検出誤差を低減するような検出用パターンを設計した。ところで、搬送ベルト3の周面の移動速度に生じる速度ムラには、搬送ベルト3に関連する長周期の速度変動成分のみが含まれているとは限らない。第1の実施形態のように、搬送ベルト3の周面の移動速度の変動として、搬送ベルト3の回転周期に等しい特定周期の変動だけでなく、それと異なる周期の変動が更に生じている場合がある。例えば、搬送ベルト3の駆動ローラ4の回転周期と等しい比較的短い周期の速度変動が、搬送ベルト3の周面の移動速度に更に生じている場合もある。そこで、本実施形態では、搬送ベルト3に関連する長周期の速度変動成分だけでなく、駆動ローラ4に関連する速度変動成分等の、比較的短い周期の速度変動成分によって生じる色ずれの検出誤差を低減する。なお、以下では第1の実施形態と共通する部分については説明を省略又は簡略化する。
第1の実施形態では、図15の1800bにおいて、位置ずれの検出誤差が最小値となるオフセット値は、基準色Kの検出用パターンの転写位置とレジ検出センサ6によって当該検出用パターンが検出される検出位置との間の距離Rに依存しないことを説明した。その一方で、当該最小値は、距離Rに依存して変化することを説明した。そこで、第3の実施形態では、距離Rを、位置ずれの検出誤差を更に低減可能な距離に設定することを特徴とする。なお、本実施形態では、色ずれの検出用パターンとして、第1の実施形態で使用した検出用パターンと同一の検出用パターンを使用する。なお、以下では第1及び第2の実施形態と共通する部分については説明を省略又は簡略化する。
R=B/2−SY/2 (18)
と設定すると、関係1及び2におけるタイミング間隔は、(B/2)/V=τB/2[sec]となり、これは搬送ベルト3の回転周期の1/2であることがわかる。即ち、関係1及び2にそれぞれ含まれる2つのタイミングにおいて、搬送ベルト3の速度変動はちょうど逆位相の関係となる。
ΔYK(tK)={ΔT(tK−(SY/2)/V)+ΔS(tK+(R+SY/2)/V)}
−{ΔT(tK)+ΔS(tK+R/V)} (19)
と表わせる。ここで、右辺の第1項と第4項とが関係1に対応し、第2項と第3項とが関係2に対応する。また、第1の実施形態の図14を参照して説明したように、搬送ベルト3の速度変動に起因してパターン転写時及び転写時に生じる位置ずれは、符号が逆になることから、式(10)及び(11)よりΔT(t)=−ΔS(t)である。以上より、式(19)に含まれる関係1及び関係2に対応する項は、それぞれ次式のように変形することができる。
関係1:
ΔT(tK−SY/V)+ΔT((tK−SY/V)+τB/2)=0 (20)
関係2:
−ΔT(tK+τB/2)−ΔT(tK)=0 (21)
式(20)及び(21)に示すように、関係1及び関係2にそれぞれ含まれる2つのタイミングにおいて、搬送ベルト3の速度変動はちょうど逆位相となるため、検出誤差は、関係1及び2のそれぞれで相殺されて0となる。従って、距離Rを式(18)の関係に設定することによって、検出誤差が0となる。ここで、検出誤差が0となる距離Rの最適値RYは、式(18)に基づいて、RY=850/2−75/2=387.5[mm]と簡単に計算することができる。
上述の第1乃至第3の実施形態では、無端状ベルトとして、用紙を静電的に吸着して各画像形成部へ搬送する搬送ベルト3を用いる画像形成装置について説明してきた。しかし、本発明は、これに限定されることはなく、例えば、無端状ベルトとして中間転写ベルトを用いる中間転写方式の画像形成装置に対しても適用できる。この場合、感光ドラム1a,1b,1c,1dの表面に形成された各トナー像は、中間転写ベルトの表面に、重ねて転写される。これにより、中間転写ベルトの表面にはカラーのトナー像が形成される。その後、中間転写ベルト上のトナー像は、2次転写部において、用紙カセットから搬送されてきた用紙の表面に転写される。このようにして、表面にカラーのトナー像が形成された用紙は、定着器(図示せず)へ搬送され、熱及び圧力で定着器によってトナー像が用紙上に定着される。その後、当該用紙は装置外部へ排出される。
Claims (13)
- 画像を形成するための無端状ベルトと、前記無端状ベルトの周面の移動方向に沿って相互に異なる位置に設けられ、前記無端状ベルトに、それぞれが異なる色の画像を形成する複数の画像形成手段と、前記無端状ベルトの周面の移動方向に沿って前記複数の画像形成手段よりも下流側の位置に設けられたセンサとを備える画像形成装置であって、
前記無端状ベルトに複数の異なる色の画像を重ねて形成した場合の色ずれ量を算出するための、それぞれ異なる色の複数のパターン画像を、前記複数の画像形成手段を用いて前記無端状ベルト上に形成するパターン形成手段と、
前記パターン形成手段によって前記無端状ベルト上に形成された前記複数のパターン画像を前記センサを用いて検出する検出手段と、
前記検出手段による前記複数のパターン画像の検出結果から、前記色ずれ量を算出する算出手段と、
前記算出手段によって算出された前記色ずれ量に応じて色ずれを補正する補正手段と、を備え、
前記パターン形成手段は、前記無端状ベルト上において前記複数の画像形成手段のそれぞれによってパターン画像が形成される形成位置についての理想位置からの変化量と、前記センサによって当該パターン画像が検出される検出位置についての理想位置からの変化量とを合計して得られる合計変化量を、前記無端状ベルトの周面の移動方向における前記複数の画像形成手段の間隔と等しい間隔で前記複数の画像形成手段によって前記無端状ベルト上に前記複数のパターン画像が形成される場合に得られる前記合計変化量よりも低減する第1の間隔で、前記複数の画像形成手段を用いて前記無端状ベルト上に前記複数のパターン画像を形成する
ことを特徴とする画像形成装置。 - 前記第1の間隔は、
前記無端状ベルトの周面の移動速度が特定周期で変動する場合に生じる、基準色についての前記合計変化量と前記基準色以外の各色についての前記合計変化量との差分を、前記無端状ベルトの周面の移動方向における前記複数の画像形成手段の間隔と等しい間隔で前記複数の画像形成手段によって前記無端状ベルト上に前記複数のパターン画像が形成される場合の前記差分よりも低減する間隔であることを特徴とする請求項1に記載の画像形成装置。 - 前記第1の間隔は、
前記無端状ベルトの周面の移動速度が特定周期で変動する場合に生じる、基準色についての前記合計変化量と前記基準色以外の各色についての前記合計変化量との差分を最小にする間隔であることを特徴とする請求項1又は2に記載の画像形成装置。 - 前記複数の画像形成手段のうち前記無端状ベルトの周面の移動方向に沿って最も下流側の位置に配置された基準色に対応する前記画像形成手段によって形成される前記パターン画像と、前記基準色以外の各色に対応する画像形成手段によって形成される前記パターン画像との間のそれぞれの前記第1の間隔は、
前記無端状ベルトの周面の移動速度の変動に関する前記特定周期が当該無端状ベルトの回転周期に等しい場合、前記基準色に対応する前記画像形成手段と、前記基準色以外の各色に対応する画像形成手段との間の各距離に対して1/2の距離であることを特徴とする請求項2または3に記載の画像形成装置。 - 前記パターン形成手段は、
前記無端状ベルトの周面の移動速度に前記特定周期と異なる周期の変動が更に生じる場合、前記複数の画像形成手段を用いて前記第1の間隔で形成する前記複数のパターン画像をパターン画像群として、前記無端状ベルトの周面の移動方向に沿って、前記無端状ベルト上で相互に異なる位置に複数のパターン画像群を形成することを特徴とする請求項2乃至4の何れか1項に記載の画像形成装置。 - 前記パターン形成手段は、
前記無端状ベルトの周面の移動方向に対して、異なるパターン画像群にそれぞれ含まれる先頭のパターン画像の間隔が、前記特定周期と異なる周期で生じる変動の1周期の期間において前記無端状ベルトの周面が移動する距離に等しい第2の間隔となるように、前記無端状ベルト上で前記複数のパターン画像群を形成することを特徴とする請求項5に記載の画像形成装置。 - 前記特定周期と異なる周期は、前記無端状ベルトを駆動する駆動ローラの回転周期に等しい周期であることを特徴とする請求項5又は6に記載の画像形成装置。
- 前記センサは、
前記無端状ベルトの周面の移動方向に沿った前記画像形成手段と前記センサとの間の距離が、前記基準色についての前記合計変化量と前記基準色以外の何れかの1色についての前記合計変化量との差分を最小にする距離となるように、前記無端状ベルトの周面の移動方向に沿って設けられることを特徴とする請求項2乃至7の何れか1項に記載の画像形成装置。 - 前記第1の間隔は、基準色に対応する画像形成手段と前記基準色以外の色に対応する画像形成手段との間の距離よりも短いことを特徴とする請求項1に記載の画像形成装置。
- 前記パターン形成手段は、前記複数のパターン画像の間隔が、基準色に対応する画像形成手段と前記基準色以外の色に対応する画像形成手段との間の距離に対して1/2の距離となるように、前記複数のパターン画像を形成することを特徴とする請求項1に記載の画像形成装置。
- 前記特定周期は、前記無端状ベルトを駆動させる駆動ローラの回転速度の変動周期よりも長い周期であることを特徴とする請求項2乃至7の何れか1項に記載の画像形成装置。
- 前記理想位置は、前記無端状ベルトの周面の移動速度が変動しない場合の位置であることを特徴とする請求項1乃至11の何れか1項に記載の画像形成装置。
- 画像を形成するための無端状ベルトと、前記無端状ベルトの周面の移動方向に沿って相互に異なる位置に設けられ、前記無端状ベルトに、それぞれが異なる色の画像を形成する複数の画像形成手段と、前記無端状ベルトの周面の移動方向に沿って前記複数の画像形成手段よりも下流側の位置に設けられたセンサとを備える画像形成装置の制御方法であって、
パターン形成手段が、前記無端状ベルトに複数の異なる色の画像を重ねて形成した場合の色ずれ量を算出するための、それぞれ異なる色の複数のパターン画像を、前記複数の画像形成手段を用いて前記無端状ベルト上に形成するパターン形成工程と、
前記パターン形成工程において前記無端状ベルト上に形成された前記複数のパターン画像を前記センサを用いて検出する検出工程と、
算出手段が、前記検出工程における前記複数のパターン画像の検出結果から、前記色ずれ量を算出する算出工程と、
補正手段が、前記算出工程において算出された前記色ずれ量に応じて色ずれを補正する補正工程と、を含み、
前記パターン形成工程では、前記無端状ベルト上において前記複数の画像形成手段のそれぞれによってパターン画像が形成される形成位置についての理想位置からの変化量と、前記センサによって当該パターン画像が検出される検出位置についての理想位置からの変化量とを合計して得られる合計変化量を、前記無端状ベルトの周面の移動方向における前記複数の画像形成手段の間隔と等しい間隔で前記複数の画像形成手段によって前記無端状ベルト上に前記複数のパターン画像が形成される場合に得られる前記合計変化量よりも低減する第1の間隔で、前記複数の画像形成手段を用いて前記無端状ベルト上に前記複数のパターン画像を形成する
ことを特徴とする画像形成装置の制御方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010278393A JP5801553B2 (ja) | 2010-12-14 | 2010-12-14 | 画像形成装置及びその制御方法 |
| US13/311,028 US8718519B2 (en) | 2010-12-14 | 2011-12-05 | Image forming apparatus and method of controlling the same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010278393A JP5801553B2 (ja) | 2010-12-14 | 2010-12-14 | 画像形成装置及びその制御方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012128104A JP2012128104A (ja) | 2012-07-05 |
| JP2012128104A5 JP2012128104A5 (ja) | 2014-02-06 |
| JP5801553B2 true JP5801553B2 (ja) | 2015-10-28 |
Family
ID=46199535
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010278393A Expired - Fee Related JP5801553B2 (ja) | 2010-12-14 | 2010-12-14 | 画像形成装置及びその制御方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8718519B2 (ja) |
| JP (1) | JP5801553B2 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5223911B2 (ja) * | 2010-11-15 | 2013-06-26 | コニカミノルタビジネステクノロジーズ株式会社 | 画像形成装置 |
| JP6112800B2 (ja) * | 2012-08-02 | 2017-04-12 | キヤノン株式会社 | カラー画像形成装置 |
| KR101969958B1 (ko) * | 2012-11-30 | 2019-08-13 | 휴렛-팩커드 디벨롭먼트 컴퍼니, 엘.피. | 화상형성장치, 화상형성장치의 색상 정합 방법, 호스트 장치, 호스트 장치의 제어 방법, 및 컴퓨터 판독 가능한 기록 매체 |
| JP2014119494A (ja) | 2012-12-13 | 2014-06-30 | Canon Inc | 画像形成装置 |
| JP2015197610A (ja) | 2014-04-01 | 2015-11-09 | キヤノン株式会社 | 画像形成装置 |
| JP6511877B2 (ja) * | 2015-03-10 | 2019-05-15 | 富士ゼロックス株式会社 | 画像形成装置 |
| JP2017009818A (ja) * | 2015-06-23 | 2017-01-12 | 株式会社沖データ | 画像形成装置 |
| US10447893B2 (en) | 2018-02-22 | 2019-10-15 | Kabushiki Kaisha Toshiba | Image forming apparatus, computer-readable storage medium, and image forming method with position acquisition and correction |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001356542A (ja) | 2000-06-16 | 2001-12-26 | Canon Inc | カラー画像形成装置並びにカラー画像形成装置の制御方法および記憶媒体 |
| JP2005316510A (ja) | 2005-06-24 | 2005-11-10 | Konica Minolta Holdings Inc | カラー画像形成装置 |
| KR101572164B1 (ko) * | 2009-01-12 | 2015-11-26 | 삼성전자 주식회사 | 화상형성장치 및 그 컬러정렬방법 |
| US8335458B2 (en) | 2009-05-01 | 2012-12-18 | Canon Kabushiki Kaisha | Image forming apparatus |
-
2010
- 2010-12-14 JP JP2010278393A patent/JP5801553B2/ja not_active Expired - Fee Related
-
2011
- 2011-12-05 US US13/311,028 patent/US8718519B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US20120148315A1 (en) | 2012-06-14 |
| US8718519B2 (en) | 2014-05-06 |
| JP2012128104A (ja) | 2012-07-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5801553B2 (ja) | 画像形成装置及びその制御方法 | |
| US8422903B2 (en) | Image forming apparatus and image forming method | |
| US9310705B2 (en) | Color image forming apparatus | |
| JP4485964B2 (ja) | 画像形成装置及び画像倍率補正方法 | |
| JP4815363B2 (ja) | 光走査装置及び画像形成装置 | |
| JP2001180043A (ja) | 画像形成装置 | |
| US20080084571A1 (en) | Image forming apparatus | |
| JP2013240994A (ja) | レーザ光間の位置ずれを補正する画像形成装置 | |
| JP2007232763A (ja) | カラー画像形成装置 | |
| JP4808004B2 (ja) | 光学装置、及び画像形成装置 | |
| JP3698509B2 (ja) | カラー画像形成装置 | |
| JP2004004510A (ja) | 光走査装置及び画像形成装置 | |
| JP2006349907A (ja) | カラー画像形成装置 | |
| JP4546845B2 (ja) | 光ビーム走査装置、画像形成装置及び倍率誤差補正方法 | |
| JP4076548B2 (ja) | カラー画像形成装置 | |
| JP4849878B2 (ja) | 位置ずれ補正方法及びカラー画像形成装置 | |
| JP5137677B2 (ja) | カラー画像形成装置 | |
| JP2017203964A (ja) | 画像形成装置 | |
| JP2006039092A (ja) | カラー画像形成装置 | |
| JP6486430B2 (ja) | レーザ光間の位置ずれを補正する画像形成装置 | |
| JP2000355122A (ja) | 画像形成装置 | |
| JP6403814B2 (ja) | カラー画像形成装置 | |
| JP2006297767A (ja) | 画像形成装置 | |
| JP2009198997A (ja) | 画像形成装置 | |
| JP2010210800A (ja) | 画像形成装置、位置合わせ補正方法、及び位置合わせ補正制御プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131213 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131213 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140925 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20141003 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141202 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150525 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150715 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150731 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150827 |
|
| LAPS | Cancellation because of no payment of annual fees |