JP5723402B2 - 車輪作用力検出装置 - Google Patents
車輪作用力検出装置 Download PDFInfo
- Publication number
- JP5723402B2 JP5723402B2 JP2013040295A JP2013040295A JP5723402B2 JP 5723402 B2 JP5723402 B2 JP 5723402B2 JP 2013040295 A JP2013040295 A JP 2013040295A JP 2013040295 A JP2013040295 A JP 2013040295A JP 5723402 B2 JP5723402 B2 JP 5723402B2
- Authority
- JP
- Japan
- Prior art keywords
- strain gauge
- cylindrical portion
- component force
- radial
- hub
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L1/00—Measuring force or stress, in general
- G01L1/005—Measuring force or stress, in general by electrical means and not provided for in G01L1/06 - G01L1/22
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L1/00—Measuring force or stress, in general
- G01L1/20—Measuring force or stress, in general by measuring variations in ohmic resistance of solid materials or of electrically-conductive fluids; by making use of electrokinetic cells, i.e. liquid-containing cells wherein an electrical potential is produced or varied upon the application of stress
- G01L1/22—Measuring force or stress, in general by measuring variations in ohmic resistance of solid materials or of electrically-conductive fluids; by making use of electrokinetic cells, i.e. liquid-containing cells wherein an electrical potential is produced or varied upon the application of stress using resistance strain gauges
- G01L1/2206—Special supports with preselected places to mount the resistance strain gauges; Mounting of supports
- G01L1/2218—Special supports with preselected places to mount the resistance strain gauges; Mounting of supports the supports being of the column type, e.g. cylindric, adapted for measuring a force along a single direction
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/16—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring several components of force
- G01L5/161—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring several components of force using variations in ohmic resistance
- G01L5/1627—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring several components of force using variations in ohmic resistance of strain gauges
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2204/00—Indexing codes related to suspensions per se or to auxiliary parts
- B60G2204/10—Mounting of suspension elements
- B60G2204/11—Mounting of sensors thereon
- B60G2204/115—Wheel hub bearing sensors
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Force Measurement Appropriate To Specific Purposes (AREA)
Description
また、例えば特許文献1には、肉薄中空円筒体の周面における周方向に互いに独立な位置に、6つのひずみゲージを具備し、これらの各ひずみゲージで検出されるひずみ量から円筒体の両端間に加えられた力による各軸方向荷重と各軸曲げモーメントを演算して求める6分力検出装置が記載されている。
また、このようなロードセルは、ビームの機械加工やその表面へのひずみゲージの実装など製造工程が煩雑で量産には不向きであり、コストが高価であった。
一方、車両のサスペンション装置においてハブユニットが取り付けられる部材であるアップライトにひずみゲージ等のセンサを設けることも考えられるが、この場合にも演算手段が必要であり、さらに、精度の確保も困難である。
上述した問題に鑑み、本発明の課題は、車両への装着が容易であるとともに、構造が簡素で製造が容易でありかつ出力処理のため複雑な演算処理を行なう必要がない車輪作用力検出装置を提供することである。
請求項1に係る発明は、サスペンション装置によって支持される車体側部材に固定される取付部と、車輪が固定されるとともに、前記取付部に対して車軸回りに回転可能に支持されたハブと、前記車軸と実質的に同心に形成された筒状部を有し、該筒状部の一方の端部が前記取付部に固定され、他方の端部がハブベアリングを介して前記ハブに接続された感受体と、前記感受体の前記筒状部の周面に設けられた1分力あたり少なくとも4個のひずみゲージを含むブリッジ回路を有する分力検出手段とを備え、前記ハブベアリングは、前記感受体と前記ハブとの間に設けられ、ラジアル方向の荷重を負担するラジアルベアリングと、前記感受体と前記ハブとの間に設けられ、スラスト方向の荷重を負担するとともに前記ラジアルベアリングとは別個に設けられたスラストベアリングとを有することを特徴とする車輪作用力検出装置である。
これによれば、分力測定用のロードセルをハブユニット内に設けることによって、既存のハブユニットと換装することによって容易に車両に装着することができる。また、車輪の中心に近接した箇所に配置することが可能となり、その出力をそのまま車輪作用力として用いることが可能となる。
また、例えば十字状のビームを感受体とする既存の多分力ロードセルに対して、感受体の製造及びひずみゲージの取付工程を簡素化することが可能となり、量産化が容易となってコストを低くすることができる。
さらに、筒状部における応力斑の対称性を利用して、各分力の相互干渉を抑えるとともに、ドリフトをバランスさせ、ブリッジ回路の出力に対する信号処理演算を不要とすることが可能となり、信号処理系の構造を大幅に簡素化することができる。
また、ラジアルベアリングとスラストベアリングとを別個に設けたことによって、例えば大径のアンギュラベアリング等の多機能化された特殊なベアリングを用いる必要がなく、汎用のベアリングを用いることが可能となり、ベアリングの選択自由度等の設計自由度が向上する。
また、シールの構成も簡素化することができる。
これによれば、ラジアルベアリング、スラストベアリングを軸方向に配列した場合に対して軸方向の寸法を小さくして構成をコンパクトにするとともに、感受体に対して外径側、内径側からそれぞれラジアル荷重、スラスト荷重を伝達することによって、感度を向上することができる。
また、ハブユニットの中央部にスラストベアリングの予圧調整機構を容易に配置することができる。
これによれば、全ての分力、モーメントの中心軸が1点に集中するいわゆる単焦点型の構成とすることが容易であり、分力相互間の干渉が低減されて補償換算が不要となる。
これによれば、車軸回りのモーメントを検出することによって、転がり抵抗の測定や補償用、故障検出用などに利用することが可能となる。
これによれば、感受体を例えば簡単な旋盤加工等によって形成することが可能となり、その製造工程を簡素化して、量産により適した仕様とすることができる。
また、感受体を円形断面とすることによって、応力斑の対称性を確保することができる。
これによれば、分力検出手段において、各分力及びモーメントの中心軸が集中する点(以下、「焦点」と称する)と車輪の中心とがずれた場合に必要となる演算を不要として装置の簡素化を図ることができる。
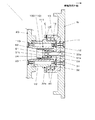
図1は、本発明を適用した車輪作用力検出装置の実施例であるハブユニットの断面図であって、車軸(車輪の回転中心軸)を含む鉛直面で切って見た図である。
例えばサスペンション装置がストラット式である場合は、アップライトは上端部がサスペンションストラットを構成するショックアブソーバのシェルケース下端部に固定され、下端部がボールジョイント等を介してロワアームに連結される。
また、サスペンション装置がマルチリンク式やダブルウィッシュボーン式である場合は、アップライトはその上端部及び下端部がそれぞれアッパアーム及びロワアームに揺動可能に連結され、さらに、必要に応じてトレーリングアーム等が接続される。
ハブ10は、円盤部11、円筒部12等を有して構成されている。
円盤部11は、ホイールWの車幅方向内側の面部と当接し、ボルト等の締結手段によってホイールWが固定される部分である。
円盤部11は、ホイールWの回転中心と実質的に同心の円盤状に形成されている。
円筒部12は、ホイールWの回転中心と実質的に同心の円筒状に形成されている。
円筒部12の内径側には、ラジアルベアリング40の外輪が挿入され固定される。
円筒部12の内周面部には、ラジアルベアリング40の脱落を防止するCリングCが組み込まれる周方向溝13が形成されている。
また、ホイールW及び円盤部11の中央部には、後述するカラー51が挿入される開口が設けられている。
ハブユニット固定部20には、6分力検出装置100の感受体110の第2フランジ113が、ボルト等の締結手段によって固定される。
入力伝達部30は、環状円盤部31、外筒部32、内筒部33等を有して構成されている。
環状円盤部31は、中央部に外周縁と同心の円形開口を有する平板状の円盤として形成されている。
環状円盤部31には、6分力検出装置100の感受体110の第1フランジ112が、ボルト等の締結手段によって固定される。
外筒部32の外周面部は、ラジアルベアリング40の内輪に挿入される。
外筒部32の外周面部には、ラジアルベアリング40の内輪の車幅方向内側の端部と当接し、軸方向位置を位置決めするするフランジ部32aが形成されている。
外筒部32の内径側には、6分力検出装置100の感受体110が挿入される。
外筒部32の内周面部は、感受体110の円筒部111の外周面と隙間を隔てて対向して配置されている。
内筒部33は、6分力検出装置100の感受体110の内径側に挿入される。
内筒部33の外周面部は、感受体110の円筒部111の内周面と隙間を隔てて対向して配置されている。
内筒部33の内周面部における車幅方向外側の端部には、段状に径を小さく(内径側に張り出して)形成され、スラストベアリング50を保持する段部33aが形成されている。
内筒部33の内周面部におけるスラストベアリング50の車幅方向内側の端部には、固定ふた34が内径側に挿入される。
固定ふた34は、スラストベアリング50を保持する円盤状の部材であって、外周面部に形成されたオネジ部を、内筒部33の内径側に形成されたメネジ部に締結される。
ラジアルベアリング40は、6分力検出装置100の感受体110の車幅方向外側(ハブ10側)の端部の外径側に配置されている。
ラジアルベアリング40として、例えば、単列の深溝玉軸受を2列並べて用いることができる。
ラジアルベアリング40の外輪は、ハブ10の円筒部12の内径側に挿入され、実質的に固定されるとともに、CリングCによって脱落が防止されている。
ラジアルベアリング40の外輪は、ハブ10及びホイールWとともに、内輪に対して相対回転する。
ラジアルベアリング40の内輪には、入力伝達部30の外筒部32が、フランジ部32aが突き当たるまで挿入され、実質的に固定されている。
スラストベアリング50は、6分力検出装置100の感受体110の車幅方向外側の端部の内径側に配置されている。
スラストベアリング50として、例えば、スラスト玉軸受を用いることができる。
スラストベアリング50は、入力伝達部30の内筒部33の内径側へ、車幅方向内側から挿入され、車幅方向外側の端部(軌道板)は、段部33aに突き当てられた状態で配置され、入力伝達部30に実質的に固定される。
カラー51は、シャフト部51a、フランジ部51bを有して構成されている。
シャフト部51aは、ホイールWの回転中心軸と同心に配置された軸状の部材であって、ハブ10及びホイールWの中央部に形成された開口に挿入されている。
フランジ部51bは、シャフト部51aの車幅方向内側の端部から外径側につば状に張り出して形成された円盤状の部分である。
フランジ部51bの車幅方向外側の面部は、スラストベアリング50の車幅方向内側の端面と当接している。
シャフト部51aの車幅方向外側の端部は、図示しないロックナット等の締結手段によって、ハブ10に締結されるとともに、この締付トルクによって、シャフト部51aに張力を与え、スラストベアリング50へ予圧を与えるようになっている。
また、フランジ部51bの車幅方向内側の面部は、スラストベアリング52を介して、固定ふた34によって保持されている。
スラストベアリング52は、フランジ部51b及び固定ふた34の間に挟持され、フランジ部51bと固定ふた34との相対回転を許容しつつこれらの間でスラスト力を伝達する。
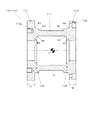
図2は、実施例の6分力検出装置100における感受体110を中心軸を含む平面で切って見た断面図である。
図2に示すように、感受体110は、円筒部111、第1フランジ112、第2フランジ113等を有して形成されている。
第1フランジ112は、円筒部111の一方の端部に設けられ、円筒部111に対して外径側及び内径側にそれぞれ張り出して形成された平板状の部分である。
第1フランジ112は、入力伝達部30の環状円盤部31が締結されるものであって、ボルトが締結されるネジ孔112aが形成されている。
また、円筒部111と第1フランジ112との間には、外径及び内径がこれらの中間となるように設定された中間部114が設けられている。中間部114の外周面は、円筒部111の外周面に対して段状に径を大きくして形成されている。また、中間部114の内周面は、円筒部111の内周面に対して段状に径を小さくして形成されている。
中間部114の外径側における第2フランジ113側の端面と、円筒部111の外周面との間には、R部(R2)が設けられている。
第1フランジ112の内径側における第2フランジ113側の端面と、中間部114の内周面との間には、R部(R3)が設けられている。
中間部114の内径側における第2フランジ113側の端面と、円筒部111の内周面との間には、R部(R4)が設けられている。
上述した各R部(R1〜R4)のうち、R1とR3とは、感受体110の軸方向における位置がほぼ一致して配置されている。
また、R2とR4とは、感受体110の軸方向における位置が、R2のほうが第2フランジ113側となるようにオフセットして配置されている。
第2フランジ113は、ハブユニット固定部20が締結されるものであって、ボルトが挿入されるボルト孔113aが形成されている。
中間部115の外径側における第1フランジ112側の端面と、円筒部111の外周面との間には、R部(R6)が設けられている。
第2フランジ113の内径側における第1フランジ112側の端面と、中間部115の内周面との間には、R部(R7)が設けられている。
中間部115の内径側における第1フランジ112側の端面と、円筒部111の内周面との間には、R部(R8)が設けられている。
上述した各R部(R5〜R8)のうち、R5とR7とは、感受体110の軸方向における位置がほぼ一致して配置されている。
また、R6とR8とは、感受体110の軸方向における位置が、R6のほうが第1フランジ112側となるようにオフセットして配置されている。
なお、第1フランジ112の厚さt1及び第2フランジ113の厚さt2は、円筒部111の肉厚t0に対して十分大きくなるように設定される。
Fx検出系は、感受体110の円筒部111に作用する径方向(以下、x軸方向と称する)の力Fxを検出するものである。
Fy検出系は、感受体110の円筒部111に作用するx軸方向と直交する方向の径方向(以下、y軸方向と称する)の力Fyを検出するものである。
Fz検出系は、感受体110の円筒部111に作用する軸方向(以下、z軸方向と称する)の力Fzを検出するものである。
My検出系は、感受体110の円筒部111に作用するy軸回りのモーメントMyを検出するものである。
Mz検出系は、感受体110の円筒部111に作用するz軸回りのモーメントMzを検出するものである。
図3は、実施例の6分力検出装置におけるひずみゲージの配置を示す模式的斜視図である。
図4は、実施例の6分力検出装置における力検出系のひずみゲージの配置及びブリッジ回路の構成を示す図である。図4(a)、図4(b)、図4(c)は、それぞれFx検出系、Fy検出系、Fz検出系を示している。
図5は、実施例の6分力検出装置におけるモーメント検出系のブリッジ回路の構成を示す図である。図5(a)、図5(b)、図5(c)は、それぞれMx検出系、My検出系、Mz検出系を示している。
なお、図4、図5においては、中間部114、115等は図示を省略している。
ひずみゲージ121は、円筒部111の外周面における第1フランジ112側の領域(中間部114に近接した領域)に配置されている。
ひずみゲージ122は、ひずみゲージ121を通りかつ円筒部111の軸方向と平行な直線上に配置され、円筒部111の外周面における第2フランジ113側の領域(中間部115に近接した領域)に配置されている。
ひずみゲージ123は、ひずみゲージ122からみて円筒部111の中心軸回りに180度ずらした位置(ひずみゲージ122に対して円筒部111の中心軸対称な位置)に配置されている。
ひずみゲージ124は、ひずみゲージ121からみて円筒部111の中心軸回りに180度ずらした位置(ひずみゲージ121に対して円筒部111の中心軸対称な位置)に配置されている。
ひずみゲージ131は、Fx検出系のひずみゲージ121に対して、円筒部111の中心軸回りに90度ずらして配置されている。
ひずみゲージ132は、Fx検出系のひずみゲージ122に対して、円筒部111の中心軸回りに90度ずらして配置されている。
ひずみゲージ131とひずみゲージ132とは、円筒部111の軸方向と平行な同一直線上に配置されている。
ひずみゲージ133は、ひずみゲージ132からみて円筒部111の中心軸回りに180度ずらした位置(ひずみゲージ132に対して円筒部111の中心軸対称な位置)に配置されている。
ひずみゲージ134は、ひずみゲージ131からみて円筒部111の中心軸回りに180度ずらした位置(ひずみゲージ131に対して円筒部111の中心軸対称な位置)に配置されている。
ひずみゲージ141は、Fx検出系のひずみゲージ121、122の中間に配置されている。
ひずみゲージ142,143,144は、それぞれひずみゲージ141に対して、円筒部111の中心軸回りの位相が、90度、180度、270度ずれた位置に配置されている。
ひずみゲージ151は、Fy検出系のひずみゲージ131に対して、円筒部111の中心軸方向に隣接して配置されている。
ひずみゲージ152は、Fy検出系のひずみゲージ132に対して、円筒部111の中心軸方向に隣接して配置されている。
ひずみゲージ151とひずみゲージ152とは、円筒部111の軸方向と平行な同一直線上に配置されている。
ひずみゲージ153は、ひずみゲージ152からみて円筒部111の中心軸回りに180度ずらした位置(ひずみゲージ152に対して円筒部111の中心軸対称な位置)に配置されている。
ひずみゲージ154は、ひずみゲージ151からみて円筒部111の中心軸回りに180度ずらした位置(ひずみゲージ151に対して円筒部111の中心軸対称な位置)に配置されている。
ひずみゲージ161は、Fx検出系のひずみゲージ121に対して、円筒部111の中心軸方向に隣接して配置されている。
ひずみゲージ162は、Fx検出系のひずみゲージ122に対して、円筒部111の中心軸方向に隣接して配置されている。
ひずみゲージ161とひずみゲージ162とは、円筒部111の軸方向と平行な同一直線上に配置されている。
ひずみゲージ163は、ひずみゲージ162からみて円筒部111の中心軸回りに180度ずらした位置(ひずみゲージ162に対して円筒部111の中心軸対称な位置)に配置されている。
ひずみゲージ164は、ひずみゲージ161からみて円筒部111の中心軸回りに180度ずらした位置(ひずみゲージ161に対して円筒部111の中心軸対称な位置)に配置されている。
ひずみゲージ171は、Fz検出系のひずみゲージ141、142の中間に配置されている。
ひずみゲージ172は、Fz検出系のひずみゲージ142,144の中間に配置されている。
ひずみゲージ173,174は、それぞれひずみゲージ172,171に対して、円筒部111の中心軸対称となる位置に配置されている。
(1)分力測定用のロードセルである6分力検出装置100をハブユニット1内に設けることによって、既存のハブユニットと換装することによって、容易に本実施例のハブユニット1を車両に装着することができる。また、車輪の中心に近接した箇所に配置することが可能となり、その出力をそのまま車輪作用力として用いることが可能となる。
また、感受体110は、例えば旋盤による機械加工等によって比較的容易に形成することが可能であり、ひずみゲージは円筒部111の表面側のみに実装されることから、例えば十字状のビームを感受体とする既存の6分力検出装置に対して、感受体110の製造及びひずみゲージの取付工程を簡素化することが可能となり、量産に適しかつコストが安価である。
さらに、回路もプリントにより一体に形成することが可能である。
(2)感受体110のハブ10側の端部の外径側にラジアルベアリング40を配置し、内径側にスラストベアリング50を配置することによって、感受体110の外径側、内径側からそれぞれ荷重を伝達することによって、荷重の伝達効率を高め、検出感度を向上することができる。また、ラジアルベアリング40、スラストベアリング50として汎用かつ既製品のベアリングを用いることができ、さらにシール等も容易に行うことができることから、ベアリングの選択自由度等の設計自由度を向上するとともに、製造の容易化を図ることができる。
(3)円筒部111における応力斑の対称性を利用して、各分力の相互干渉を抑えるとともに、ドリフトをバランスさせ、ブリッジ回路の出力に対する信号処理演算を不要とすることが可能となり、信号処理系の構造を大幅に簡素化することができる。
(4)全ての分力、モーメントの中心軸が1点に集中するいわゆる単焦点型の構成とすることが容易であり、分力相互間の干渉が低減されて補償換算が不要となる。
また、このような焦点を車輪の中心と実質的に一致させることによって、計測位置と車輪中心とのずれに起因して必要となる演算処理を不要とすることができる。
(5)円筒部111と中間部114との間のR部R2,R4をオフセットして配置するとともに、円筒部111と中間部115との間のR部R6、R8をオフセットして配置することによって、第1フランジ112、第2フランジ113に支持部または入力部を固定する際の締結トルク等の影響が円筒部111に及ぶことを防止し、より高精度な6分力の検出を行なうことができる。
(6)車輪の上下力、前後力、軸方向力、及び、鉛直軸、前後軸回りのモーメントからなる5分力に加えて、車軸回りのモーメントも検出することによって、転がり抵抗の測定や補償用、故障検出用などを行なうことができる。
本発明は、以上説明した実施例に限定されることなく、種々の変形や変更が可能であって、それらも本発明の技術的範囲内である。
(1)ハブユニットを構成する各部材の形状、構造、材質、配置等は、適宜変更することが可能である。
さらに、ラジアルベアリング、スラストベアリングの種類も、実施例のものに限定されず、他の種類のものであってもよい。
(2)実施例では、6分力検出装置の感受体の筒状部は、一例として一様の外径、内径を有する円筒状に形成したが、本発明はこれに限らず、例えば、外径及び内径が軸方向距離に応じて変化するテーパ状の筒状体としてもよい。さらに、断面形状も円形には限定されず、多角形断面やその他の断面形状であってもよい。
(3)実施例では、例えば6分力を検出しているが、本発明はこれに限らず、これらのうち一部の分力のみ検出する構成としてもよい。例えば、車軸回りのモーメントを省略した5分力を検出する構成としてもよい。
(4)各分力検出系において用いられる各ひずみゲージは、単一のひずみゲージからなる構成に限らず、複数のひずみゲージを並列あるいは直列に接続して一つのひずみゲージとして用いるようにしてもよい。このような構成とすることによって、感度の向上等を図ることができる。
(5)円筒部の両端に設けられる段部の有無、寸法、形状や、境界部におけるRの設定などは、上述した実施例の構成に限らず、適宜変更することが可能である。
(6)実施例では各ひずみゲージは円筒部の外周面に貼付されているが、内周面に貼付する構成としてもよい。
11 円盤部 12 円筒部
13 周方向溝 C Cリング
W ホイール
20 ハブユニット固定部 30 入力伝達部
31 環状円盤部 32 外筒部
32a フランジ部 33 内筒部
33a 段部 34 固定ふた
40 ラジアルベアリング
50 スラストベアリング 51 カラー
51a シャフト部 51b フランジ部
52 スラストベアリング
100 6分力検出装置 110 感受体
111 円筒部 112 第1フランジ
112a ネジ孔 113 第2フランジ
113a ボルト孔 114 中間部
115 中間部 R1〜R8 R部
121〜124 Fx検出系の単軸ひずみゲージ
131〜134 Fy検出系の単軸ひずみゲージ
141〜144 Fz検出系の単軸ひずみゲージ
151〜154 Mx検出系の単軸ひずみゲージ
161〜164 My検出系の単軸ひずみゲージ
171〜174 Mz検出系のせん断形ひずみゲージ
F 焦点
Claims (6)
- サスペンション装置によって支持される車体側部材に固定される取付部と、
車輪が固定されるとともに、前記取付部に対して車軸回りに回転可能に支持されたハブと、
前記車軸と実質的に同心に形成された筒状部を有し、該筒状部の一方の端部が前記取付部に固定され、他方の端部がハブベアリングを介して前記ハブに接続された感受体と、
前記感受体の前記筒状部の周面に設けられた1分力あたり少なくとも4個のひずみゲージを含むブリッジ回路を有する分力検出手段とを備え、
前記ハブベアリングは、
前記感受体と前記ハブとの間に設けられ、ラジアル方向の荷重を負担するラジアルベアリングと、
前記感受体と前記ハブとの間に設けられ、スラスト方向の荷重を負担するとともに前記ラジアルベアリングとは別個に設けられたスラストベアリングとを有すること
を特徴とする車輪作用力検出装置。 - 前記ラジアルベアリングは、前記感受体の前記ハブ側の端部の外径側に設けられ、
前記スラストベアリングは、前記感受体の前記ハブ側の端部の内径側に設けられること
を特徴とする請求項1に記載の車輪作用力検出装置。 - 前記分力検出手段は、前記筒状部の径方向に作用する2分力をそれぞれ検出する第1の径方向分力検出手段及び第2の径方向分力検出手段と、前記筒状部の軸方向に作用する分力を検出する軸方向分力検出手段と、前記筒状部の径方向に沿った2軸回りに作用するモーメントをそれぞれ検出する第1の径方向回りモーメント検出手段及び第2の径方向回りモーメント検出手段とを含み、
前記第1の径方向分力検出手段、前記第2の径方向分力検出手段、前記第1の径方向回りモーメント検出手段、前記第2の径方向回りモーメント検出手段は、それぞれ前記筒状部に設けられた第1乃至第4の単軸ひずみゲージを含むブリッジ回路を有し、第2の単軸ひずみゲージは、第1の単軸ひずみゲージに対して前記筒状部の中心軸方向に離間して配置され、第3の単軸ひずみゲージ及び第4の単軸ひずみゲージは、それぞれ第2の単軸ひずみゲージ及び第1の単軸ひずみゲージに対して前記筒状部の中心軸回りにほぼ180度ずらした位置に配置され、
前記軸方向分力検出手段は、前記筒状部の周方向にほぼ等間隔に分散して設けられた第1乃至第4の単軸ひずみゲージを含むブリッジ回路を有すること
を特徴とする請求項1又は請求項2に記載の車輪作用力検出装置。 - 前記分力検出手段は、前記筒状部の軸回りに作用するモーメントを検出する軸方向回りモーメント検出手段を含み、
前記軸方向回りモーメント検出手段は、前記筒状部の周方向にほぼ等間隔に分散して設けられた第1乃至第4のせん断型ひずみゲージを含むブリッジ回路を有すること
を特徴とする請求項3に記載の車輪作用力検出装置。 - 前記筒状部は、内径及び外径が実質的に一定あるいは一方の端部からの距離に比例して変化する円筒状に形成されること
を特徴とする請求項1から請求項4までのいずれか1項に記載の車輪作用力検出装置。 - 前記分力検出手段において、各分力及びモーメントの中心軸を1点に集中させるとともに、この点を前記車輪の中心と実質的に一致させたこと
を特徴とする請求項1から請求項5までのいずれか1項に記載の車輪作用力検出装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013040295A JP5723402B2 (ja) | 2013-03-01 | 2013-03-01 | 車輪作用力検出装置 |
| DE102014101258.5A DE102014101258B4 (de) | 2013-03-01 | 2014-02-03 | Radbetriebskraftsensor |
| US14/175,796 US8960011B2 (en) | 2013-03-01 | 2014-02-07 | Wheel operating force sensor |
| CN201410065504.1A CN104015562B (zh) | 2013-03-01 | 2014-02-26 | 车轮作用力检测装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013040295A JP5723402B2 (ja) | 2013-03-01 | 2013-03-01 | 車輪作用力検出装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014169864A JP2014169864A (ja) | 2014-09-18 |
| JP5723402B2 true JP5723402B2 (ja) | 2015-05-27 |
Family
ID=51353136
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013040295A Active JP5723402B2 (ja) | 2013-03-01 | 2013-03-01 | 車輪作用力検出装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8960011B2 (ja) |
| JP (1) | JP5723402B2 (ja) |
| CN (1) | CN104015562B (ja) |
| DE (1) | DE102014101258B4 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017050740A1 (de) * | 2015-09-22 | 2017-03-30 | Dürr Systems Ag | Messeinrichtung zum bestimmen einer quer auf einen bolzenzapfen eines bolzens wirkenden kraft |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6084893B2 (ja) * | 2013-05-08 | 2017-02-22 | 富士重工業株式会社 | 車輪分力検出装置 |
| JP5820842B2 (ja) * | 2013-05-08 | 2015-11-24 | 富士重工業株式会社 | 車輪反力検出装置 |
| WO2015155956A1 (ja) * | 2014-04-08 | 2015-10-15 | パナソニックIpマネジメント株式会社 | 歪センサおよびそれを用いた荷重検出装置 |
| BR112017011456B8 (pt) * | 2014-12-12 | 2022-07-05 | Nuovo Pignone Srl | Método de medição de carga de acoplamento e dispositivo de medição de carga de acoplamento |
| JP6450235B2 (ja) * | 2015-03-27 | 2019-01-09 | 株式会社Subaru | 回転体の作用力検出装置 |
| US9649879B2 (en) * | 2015-03-30 | 2017-05-16 | Caterpillar Inc. | High load capacity wheel force transducer |
| GB201506496D0 (en) * | 2015-04-16 | 2015-06-03 | Expro North Sea Ltd | Measurement system and methods |
| DE202015005709U1 (de) * | 2015-08-12 | 2016-11-15 | GM Global Technology Operations LLC (n. d. Ges. d. Staates Delaware) | Kraftaufnehmer, Zugmittelgetriebe mit einem Kraftaufnehmer und Kraftfahrzeug mit einem solchen Zugmittelgetriebe |
| JP6827231B2 (ja) * | 2016-02-12 | 2021-02-10 | エヌティーツール株式会社 | スマートツールホルダ |
| DE102016116181A1 (de) * | 2016-08-01 | 2018-02-01 | Nuton GmbH | Ein- oder mehrachsige Kraftmesseinrichtung mit kurzer Verformungszone |
| DE102016116182A1 (de) * | 2016-08-01 | 2018-02-01 | Nuton GmbH | Temperaturmanagement für eine Kraftmesseinrichtung |
| DE102016114193B4 (de) * | 2016-08-01 | 2019-08-14 | Nuton GmbH | Kraftmesseinrichtung zur mehrachsigen Erfassung einwirkender Kräfte und Momente |
| JP6789853B2 (ja) | 2017-03-08 | 2020-11-25 | 日本電産コパル電子株式会社 | 力覚センサ |
| JP6746517B2 (ja) * | 2017-03-08 | 2020-08-26 | 日本電産コパル電子株式会社 | 力覚センサ |
| JP6815903B2 (ja) | 2017-03-08 | 2021-01-20 | 日本電産コパル電子株式会社 | 力覚センサ |
| JP6907993B2 (ja) | 2018-04-19 | 2021-07-21 | トヨタ自動車株式会社 | 回転体の作用力検出装置 |
| EP3564637A1 (en) | 2018-05-03 | 2019-11-06 | Movotec A/S | A force transducer, a measuring device and a system for measuring muscle stiffness |
| KR20210121657A (ko) * | 2020-03-31 | 2021-10-08 | 현대자동차주식회사 | 차량용 노면입력 하중 측정 시스템 및 방법 |
| CN112229558A (zh) * | 2020-09-28 | 2021-01-15 | 万向钱潮股份有限公司 | 一种轮毂轴承轴向力测试系统及方法 |
| KR102879616B1 (ko) * | 2023-05-12 | 2025-10-31 | 주식회사 일진글로벌 | 하중 센서를 구비하는 차량용 휠베어링 |
| DE102024120677B3 (de) * | 2024-07-19 | 2025-08-21 | Arburg Gmbh + Co Kg | Einspritzkraftsensoranordnung sowie damit ausgestattete Spritzgießeinheit und Spritzgießmaschine |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6179129A (ja) | 1984-09-27 | 1986-04-22 | Toshiba Corp | 6軸力センサ |
| JPS62263434A (ja) * | 1986-05-09 | 1987-11-16 | Yamato Scale Co Ltd | 実車測定装置 |
| JPH0610270Y2 (ja) * | 1986-12-02 | 1994-03-16 | 神奈川県 | 2分力動力計測装置 |
| US4911024A (en) * | 1989-02-10 | 1990-03-27 | Barry Wright Corporation | Force sensing |
| US5140849A (en) * | 1990-07-30 | 1992-08-25 | Agency Of Industrial Science And Technology | Rolling bearing with a sensor unit |
| JPH0485241U (ja) * | 1990-11-30 | 1992-07-24 | ||
| US5864056A (en) * | 1998-02-17 | 1999-01-26 | Bell; Larry D. | Method and apparatus for monitoring the coefficient of friction between a tire and rolling surface, particularly to provide the vehicle operator with coefficient of friction, tire tread wear out and skid warning indications |
| AU2001250927A1 (en) * | 2000-04-10 | 2001-10-23 | The Timken Company | Bearing assembly with sensors for monitoring loads |
| JP2003050171A (ja) * | 2001-08-07 | 2003-02-21 | Nissho Denki Kk | 多分力計測方法および装置 |
| JP4764619B2 (ja) * | 2004-08-23 | 2011-09-07 | 株式会社エー・アンド・デイ | 回転型分力計測装置 |
| JP5235313B2 (ja) * | 2007-02-23 | 2013-07-10 | Ntn株式会社 | 車輪用軸受装置 |
-
2013
- 2013-03-01 JP JP2013040295A patent/JP5723402B2/ja active Active
-
2014
- 2014-02-03 DE DE102014101258.5A patent/DE102014101258B4/de active Active
- 2014-02-07 US US14/175,796 patent/US8960011B2/en active Active
- 2014-02-26 CN CN201410065504.1A patent/CN104015562B/zh not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017050740A1 (de) * | 2015-09-22 | 2017-03-30 | Dürr Systems Ag | Messeinrichtung zum bestimmen einer quer auf einen bolzenzapfen eines bolzens wirkenden kraft |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102014101258B4 (de) | 2016-09-15 |
| JP2014169864A (ja) | 2014-09-18 |
| CN104015562A (zh) | 2014-09-03 |
| CN104015562B (zh) | 2016-05-25 |
| DE102014101258A1 (de) | 2014-09-04 |
| US8960011B2 (en) | 2015-02-24 |
| US20140245838A1 (en) | 2014-09-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5723402B2 (ja) | 車輪作用力検出装置 | |
| US8887581B2 (en) | Load-measuring bearing unit | |
| US8523446B2 (en) | Sensor equipped wheel support bearing assembly | |
| CN104142202B (zh) | 衬套分力检测装置 | |
| JP5886665B2 (ja) | 車輪作用力検出装置 | |
| US8567240B2 (en) | Tire force detection apparatus | |
| JP5018667B2 (ja) | 回転トルク検出装置 | |
| JP5140853B2 (ja) | 軸荷重計測装置 | |
| JP2007071280A (ja) | センサ付車輪用軸受 | |
| US8449194B2 (en) | Wheel bearing with sensor | |
| JP5094457B2 (ja) | センサ付車輪用軸受 | |
| JP5355042B2 (ja) | センサ付車輪用軸受 | |
| JP5889071B2 (ja) | 6分力検出装置 | |
| JP6385215B2 (ja) | 車輪作用力検出装置 | |
| WO2019026655A1 (ja) | ロードセルおよび軸受 | |
| JP6450235B2 (ja) | 回転体の作用力検出装置 | |
| EP2438318B1 (en) | Load-measuring bearing unit | |
| JP2007057257A (ja) | センサ付車輪用軸受 | |
| JP2007078597A (ja) | センサ付車輪用軸受 | |
| JP5219424B2 (ja) | センサ付車輪用軸受 | |
| JP2009128335A (ja) | センサ付車輪用軸受 | |
| JP2008249566A (ja) | センサ付車輪用軸受 | |
| JP2007163246A (ja) | センサ付車輪用軸受 | |
| JP2007071628A (ja) | センサ付車輪用軸受 | |
| JP2007078596A (ja) | センサ付車輪用軸受 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150108 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150113 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150210 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150324 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150327 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5723402 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |