JP5663192B2 - 処理装置、座標補正方法および座標補正プログラム - Google Patents
処理装置、座標補正方法および座標補正プログラム Download PDFInfo
- Publication number
- JP5663192B2 JP5663192B2 JP2010105475A JP2010105475A JP5663192B2 JP 5663192 B2 JP5663192 B2 JP 5663192B2 JP 2010105475 A JP2010105475 A JP 2010105475A JP 2010105475 A JP2010105475 A JP 2010105475A JP 5663192 B2 JP5663192 B2 JP 5663192B2
- Authority
- JP
- Japan
- Prior art keywords
- measurement
- inspection
- coordinates
- substrate
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B5/00—Measuring arrangements characterised by the use of mechanical techniques
- G01B5/004—Measuring arrangements characterised by the use of mechanical techniques for measuring coordinates of points
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67242—Apparatus for monitoring, sorting or marking
- H01L21/67259—Position monitoring, e.g. misposition detection or presence detection
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K13/00—Apparatus or processes specially adapted for manufacturing or adjusting assemblages of electric components
- H05K13/0015—Orientation; Alignment; Positioning
Landscapes
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Manufacturing & Machinery (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Physics & Mathematics (AREA)
- Computer Hardware Design (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Power Engineering (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Investigating Materials By The Use Of Optical Means Adapted For Particular Applications (AREA)
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
- Testing Or Measuring Of Semiconductors Or The Like (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
Description
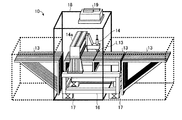
まず、本発明の一実施の形態による処理装置、処理システム、座標補正方法および座標補正プログラムを、図面を参照して詳細に説明する。なお、以下の説明では、処理装置として、ガラス基板などの基板を検査・測定する基板検査・測定装置を例に挙げる。ただし、これに限定されず、たとえば基板における欠陥箇所をレーザ照射等によって修復する、いわゆるリペア装置など、基板に対する処理を実行する各種処理装置を適用することができる。
11 制御PC
11a 制御部
11b 処理部
11c 記憶部
11d 通信部
12 ステージコントローラ
13 搬送ステージ
L13 検査・測定ライン
14 検査・測定ユニット
14a ガントリーステージ
15A、15B、… 基板搬入出部
18 外装
19 FFU
100 ホストPC
110 ネットワーク
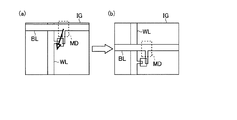
BL ビットライン
WL ワードライン
IG 検査・測定領域
MD モデル
D1 搬入出方向
D2 長手方向
M1i、M1r、M2i、M2r アライメントマーク
Rcp レシピ
W、Wi、Wr 基板
Claims (6)
- 基板上の検査・測定対象の位置を示す検査・測定座標を登録したレシピに基づいて前記基板における前記検査・測定対象に所定の処理を実行する処理装置であって、
前記基板を撮像する撮像手段を有し、該撮像手段が撮像した画像に基づいて前記検査・測定対象の検査・測定する検査・測定ユニットと、
選択中の検査・測定座標に前記検査・測定ユニットを移動させる移動手段と、
前記選択中の検査・測定座標に前記検査・測定ユニットを位置した状態で前記撮像手段により撮像された画像から前記選択中の検査・測定座標に対応する対象モデルを検索する検索処理手段と、
前記検索処理手段によって検索した結果に基づいて、前記対象モデルが検査測定領域に位置するように前記検査・測定ユニットを移動させる引きこみ処理手段と、
前記引きこみ処理手段によって引き込まれた後の前記対象モデルの実座標を前記選択中の検査・測定座標としてレシピに登録する実座標登録手段と、
を備えたことを特徴とする処理装置。 - 前記検索処理手段によって前記対象モデルを検索した結果、前記撮像手段の画像に前記対象モデルが含まれていない場合には、前記選択中の検査・測定座標を含む検査・測定領域に隣接する周辺領域に前記検査・測定ユニットを移動させて前記対象モデルの検索領域を前記周辺領域に拡張することを特徴とする請求項1に記載の処理装置。
- 前記レシピに登録する前に前記対象モデルの実座標を記憶するための記憶手段をさらに備え、
前記実座標登録手段は、前記記憶手段に全ての前記検査・測定対象の対象モデルの座標ごとの前記対象モデルの実座標が記録された後に、前記対象モデルの実座標をレシピに登録することを特徴とする請求項1又は2に記載の処理装置。 - 前記実座標登録手段によって前記対象モデルの実座標が登録された前記レシピを、ネットワークを介して他の基板検査・測定装置へ送出する通信部をさらに備えたことを特徴とする請求項1乃至請求項3に記載の処理装置。
- 基板における検査・測定対象に所定の処理を実行する際に使用するレシピに登録された前記検査・測定対象の前記基板上の座標を補正する座標補正方法であって、
前記基板を撮像する撮像手段を有し、該撮像手段が撮像した画像に基づいて前記検査・測定対象の検査・測定する検査・測定ユニットを選択中の検査・測定座標に移動させるステップと、
前記選択中の検査・測定座標に前記検査・測定ユニットを移動した位置で前記撮像手段により画像を撮像するステップと、
前記撮像手段により撮像された画像から前記選択中の検査・測定座標に対応する対象モデルを検索するステップと、
検索した結果に基づいて、前記対象モデルが検査測定領域に位置するように前記検査・測定ユニットを移動するステップと、
前記対象モデルが検査測定領域に位置したときの前記対象モデルの実座標を前記選択中の検査・測定座標としてレシピに登録するステップと、
を含むことを特徴とする座標補正方法。 - 基板における検査・測定対象に所定の処理を実行する際に使用するレシピに登録された前記検査・測定対象の前記基板上の座標を補正する処理をコンピュータに実行させるための座標補正プログラムであって、
前記基板を撮像する撮像手段を有し、該撮像手段が撮像した画像に基づいて前記検査・測定対象の検査・測定する検査・測定ユニットを選択中の検査・測定座標に移動させる処理と、
前記選択中の検査・測定座標に前記検査・測定ユニットを移動した位置で前記撮像手段により画像を撮像する処理と、
前記撮像手段により撮像された画像から前記選択中の検査・測定座標に対応する対象モデルを検索する処理と、
検索した結果に基づいて、前記対象モデルが検査測定領域に位置するように前記検査・測定ユニットを移動する処理と、
前記対象モデルが検査測定領域に位置したときの前記対象モデルの実座標を前記選択中の検査・測定座標としてレシピに登録する処理と、
を前記コンピュータに実行させるための座標補正プログラム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010105475A JP5663192B2 (ja) | 2010-04-30 | 2010-04-30 | 処理装置、座標補正方法および座標補正プログラム |
| TW100113161A TWI519777B (zh) | 2010-04-30 | 2011-04-15 | Processing device, processing system and coordinate correction method |
| KR1020110040487A KR20110121571A (ko) | 2010-04-30 | 2011-04-29 | 처리 장치, 처리 시스템 및 좌표 보정 방법 |
| CN2011101134762A CN102237262A (zh) | 2010-04-30 | 2011-04-29 | 处理装置、处理系统以及坐标校正方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010105475A JP5663192B2 (ja) | 2010-04-30 | 2010-04-30 | 処理装置、座標補正方法および座標補正プログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2011232298A JP2011232298A (ja) | 2011-11-17 |
| JP2011232298A5 JP2011232298A5 (ja) | 2013-06-20 |
| JP5663192B2 true JP5663192B2 (ja) | 2015-02-04 |
Family
ID=44887797
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010105475A Expired - Fee Related JP5663192B2 (ja) | 2010-04-30 | 2010-04-30 | 処理装置、座標補正方法および座標補正プログラム |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP5663192B2 (ja) |
| KR (1) | KR20110121571A (ja) |
| CN (1) | CN102237262A (ja) |
| TW (1) | TWI519777B (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103075970B (zh) * | 2012-12-27 | 2015-07-01 | 深圳市华星光电技术有限公司 | 测长装置直交度补偿方法及使用该方法的测长装置 |
| US9080865B2 (en) | 2012-12-27 | 2015-07-14 | Shenzhen China Star Optoelectronics Technology Co., Ltd | Orthogonality compensation method for length measurement device and length measurement device using same |
| CN103292709B (zh) * | 2013-05-24 | 2015-09-09 | 深圳市华星光电技术有限公司 | 测长机日常检测与自动补正方法 |
| JP5808454B1 (ja) | 2014-04-25 | 2015-11-10 | 株式会社日立国際電気 | 基板処理装置、半導体装置の製造方法、プログラムおよび記録媒体 |
| CN105047581A (zh) * | 2014-04-25 | 2015-11-11 | 株式会社日立国际电气 | 衬底处理装置及半导体器件的制造方法 |
| CN106814307B (zh) * | 2017-01-10 | 2020-05-12 | 深圳鼎缘电子科技有限公司 | 一种腔体滤波器自动调试方法及系统 |
| CN108226179B (zh) * | 2018-01-10 | 2021-01-22 | 京东方科技集团股份有限公司 | 自动光学检测设备的校准方法及自动修复系统 |
| CN110111383B (zh) * | 2018-05-08 | 2022-03-18 | 广东聚华印刷显示技术有限公司 | 玻璃基板的偏移校正方法、装置和系统 |
| CN112666164B (zh) * | 2020-11-23 | 2023-06-16 | 上海新时达机器人有限公司 | 针对多品类混线生产控制柜的机器人视觉检测方法 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002107137A (ja) * | 2000-09-29 | 2002-04-10 | Toshiba Corp | 検査ステージの制御方法 |
| US7127098B2 (en) * | 2001-09-13 | 2006-10-24 | Hitachi, Ltd. | Image detection method and its apparatus and defect detection method and its apparatus |
| JP3903889B2 (ja) * | 2001-09-13 | 2007-04-11 | 株式会社日立製作所 | 欠陥検査方法及びその装置並びに撮像方法及びその装置 |
| JP4207689B2 (ja) * | 2003-07-15 | 2009-01-14 | 株式会社ニコン | 位置ずれ測定装置 |
| JP2005310833A (ja) * | 2004-04-16 | 2005-11-04 | Olympus Corp | 基板検査装置および方法 |
| CN100547757C (zh) * | 2006-11-07 | 2009-10-07 | 中芯国际集成电路制造(上海)有限公司 | 一种新型晶圆定位偏移纠正方法 |
| JP2009300230A (ja) * | 2008-06-12 | 2009-12-24 | Olympus Corp | 位置合わせを行う装置、方法、およびプログラム、ならびに基準モデルを作成する装置、方法、およびプログラム |
-
2010
- 2010-04-30 JP JP2010105475A patent/JP5663192B2/ja not_active Expired - Fee Related
-
2011
- 2011-04-15 TW TW100113161A patent/TWI519777B/zh not_active IP Right Cessation
- 2011-04-29 CN CN2011101134762A patent/CN102237262A/zh active Pending
- 2011-04-29 KR KR1020110040487A patent/KR20110121571A/ko not_active Application Discontinuation
Also Published As
| Publication number | Publication date |
|---|---|
| TW201207382A (en) | 2012-02-16 |
| CN102237262A (zh) | 2011-11-09 |
| KR20110121571A (ko) | 2011-11-07 |
| JP2011232298A (ja) | 2011-11-17 |
| TWI519777B (zh) | 2016-02-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5663192B2 (ja) | 処理装置、座標補正方法および座標補正プログラム | |
| JP4257570B2 (ja) | 搬送用ロボットのティーチング装置および搬送用ロボットのティーチング方法 | |
| CN101183655A (zh) | 图形对位方法、图形检查装置及图形检查系统 | |
| JP5193112B2 (ja) | 半導体ウエーハ外観検査装置の検査条件データ生成方法及び検査システム | |
| JP4377223B2 (ja) | 基板の処理装置及び搬送装置調整システム | |
| US20170261968A1 (en) | Work management device | |
| KR20220143743A (ko) | 리소그래피 공정에서 오버레이 오류를 보정하기 위한 시스템 및 방법 | |
| JP2009038329A (ja) | ウエハーのマーキング方法、次品ダイスのマーキング方法、ウエハーの位置決め方法及びウエハー検査機 | |
| KR20150111872A (ko) | 도포 장치 및 도포 방법 | |
| JP5089765B2 (ja) | 制御装置及び制御方法 | |
| JPWO2016157356A1 (ja) | 情報管理装置及び情報管理方法 | |
| CN101571493A (zh) | 光学检测缺陷后的路径规划方法 | |
| JP5653724B2 (ja) | 位置合わせ装置、位置合わせ方法および位置合わせプログラム | |
| US20060008134A1 (en) | Substrate processing apparatus and substrate processing system | |
| JP4473827B2 (ja) | 基板処理装置及び基板の受け渡し位置の調整方法 | |
| JP5523942B2 (ja) | 部品装着装置の部品実装方法および部品装着装置 | |
| US7106434B1 (en) | Inspection tool | |
| JP2006269497A (ja) | 基板処理装置及び基板収納方法 | |
| JP2005274243A (ja) | 被検体の検査装置及びその検査方法 | |
| JP2008014650A (ja) | 表面欠陥検査装置 | |
| JP4377675B2 (ja) | 基板露光方法、基板露光装置及び表示パネルの製造方法 | |
| JP2009253224A (ja) | 部品実装方法 | |
| JP2007005617A (ja) | 進捗状況表示方法、表示プログラム、及び表示装置、並びにデバイス製造方法 | |
| JP2013062378A (ja) | 位置決め装置、および位置決め方法 | |
| JP2013098500A (ja) | 配線板測定装置及び配線板測定方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130426 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130426 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131126 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140430 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140625 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141202 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141208 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5663192 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |